Chapter 17. Sequential Recommenders
In our journey so far, we’ve learned about a variety of features which appear as explicit or as latent components in the recommendation problem. One kind of feature, which has appeared implicitly, is the history of previous recommendations and interactions. You may wish to protest here:
“All of the work we’ve done so far considers the previous recommendations and interactions! We’ve even learned about prequential training data.”
That is true, but it fails to account for more explicit relationships between the sequence of recommendations leading up to the inference request. As an example to distinguish the two: your video streaming website knows that you’ve previously seen all of Darren Aronofsky’s films, and so when The Whale is released, it’s very likely to recommend it – but this is different than when you’re on episode 10 of Succession. In the former, you may have been watching those films over years – Pi many years ago, and Black Swan earlier this year. For Succession, you have been watching an episode a night this week, and your entire recent history is made up of Logan Roy. This latter example is a sequential recommendation problem: using the most recent ordered list of interactions to predict what you’ll enjoy next.
In terms of modeling objective, the recommenders we’ve seen use pairwise relationships between potential recommendations and historical interactions. We will see that sequential recommendation aims to predict users’ next actions based on the sequential interactions in the past which may be of much higher order, i.e. combinations of interactions among 3 or more items. Most sequential recommendation models involve sequential data mining techniques e.g. Markov chains, RNNs, self-attention etc. These models usually take into consideration the short-term user behavior and are less sensisitve, even oblivious, to the global user preferences which have stabilized over time.
Initial work in sequential recommendations focused on modeling the transitions between successive items. These used Markov Chains and translation-based methods. As deep learning methods showed more and more promise in modeling sequential data – such as their biggest success in NLP – there have been many attempts to use neural network architectures to model sequential dynamics of a user’s interaction history. Early successes in this direction is GRU4Rec using an RNN to model users’ sequential interactions. Recently, transformer architectures have demonstrated superior performance for sequential data modeling. The transformer architecture lends itself to efficient parallelization and is effective at modeling long-range sequences.
Markov Chains
Despite mining for relationships to historical recommendations, the models we’ve been considering often fail to capture sequential patterns in user behavior, thereby disregarding the chronological order of user interactions. To address this shortcoming, sequential recommender systems were developed, incorporating techniques like Markov Chains to model the temporal dependencies between items.
A Markov Chain is a stochastic model that operates on the principle of memorylessness. Simply: it models the probability of transitioning from one state to another – given the current state – without considering the sequence of preceding events. Markov Chains model the sequential behavior of users by considering each state as an item, and the transition probabilities as the likelihood of a user interacting with a certain item after the current one.
The first-order Markov Chain, where the future state depends solely on the current state, was a common strategy in early sequential recommenders. Despite its simplicity, the first-order Markov Chain is effective in capturing short-term, item-to-item transition patterns, improving the quality of recommendations over non-sequential methods.
Take for example our Succession situation from above: if you’re only using a first-order Markov Chain, a really great heuristic would be “what is the next episode in the series if it’s a series, otherwise, fall back on a collaborative filtering model”. You can see that for a huge percentage of watch-hours, this naive first-order chain would simply tell the user to watch the next episode of a show. Not particularly enlightening, but a good sign. When you abstract this out further you start to get some more powerful methods.
The first-order assumption does not always hold in real-world applications, as user behavior is often influenced by a longer history of interactions. To overcome this limitation, higher-order Markov Chains look further back. In a higher-order Markov Chain, the next state is determined by a set of previous states, providing a richer model of user behavior. Nevertheless, it’s crucial to select the appropriate order, as too high an order may lead to overfitting and sparsity of the transition matrix.
Order-Two Markov Chain
Let’s consider an example of an order-two Markov Chain model using the weather. Let’s assume we have three states: sunny (
In an order-two Markov Chain, the weather of today (
The Markov Chain can be defined by a transition matrix which provides the probabilities of transitioning from one state to another. However, because we’re dealing with an order-two Markov Chain, we would have a transition tensor instead. For simplicity, let’s say we have the following transition probabilities:
You can visualize these probabilities in a three-dimensional cube, where the first two dimensions represent the state of today and yesterday, and the third dimension represents the possible states of tomorrow.
If the weather was sunny for the last two days, and we want to predict the weather for tomorrow, we would look at the transition probabilities starting with
The probabilities in the transition matrix (or tensor) are typically estimated from data. If you have a historical record of the weather for several years, you can count the number of times each transition occurs and divide by the total number of transitions to estimate the probability.
This is only a basic demonstration of an order-two Markov Chain. In real applications, the states might be much more numerous and the transition matrix much larger, but the principles remain the same.
Other Markov Models
A more advanced Markovian approach is the Markov Decision Process (MDP), which extends the Markov Chain by introducing actions and rewards. In the context of recommender systems, each action could represent a recommendation, and the reward could be the user’s response to the recommendation. By incorporating user feedback, the MDP can learn more personalized recommendation strategies.
MDPs are defined by a tuple
Let’s use a simplified MDP for a movie recommender system as an example.
-
States (
-
Actions (
-
Transition Probabilities (
-
Rewards (
The aim of the recommender system in this context is to learn a policy
This can be learned via reinforcement learning algorithms, such as Q-Learning or Policy Iteration, which essentially learn the value of taking an action in a state (i.e., recommending a movie after the user has watched a certain genre), considering the immediate reward and the potential future rewards.
The main challenge in a real-world recommender system scenario is that both the state and action spaces are extremely large, and the transition dynamics and reward function can be complex and difficult to estimate accurately. But, the principles demonstrated in this simple example remain the same.
Despite the promising performance of Markov Chain-based recommender systems, several challenges remain. The memorylessness assumption of the Markov Chain may not hold in certain scenarios where long-term dependencies exist. Furthermore, most Markov Chain models treat user-item interactions as binary events (either interaction or no interaction), which oversimplifies the variety of interactions users may have with items, such as browsing, clicking, and purchasing.
Next, we’ll cover neural networks. We’ll see how some architectures you’re likely familiar with can be relevant to learn a sequential recommender task.
RNN and CNN architectures
Recurrent Neural Networks (RNNs) are a type of neural network architecture designed to recognize patterns in sequences of data, such as text, speech, or time series data. These networks are “recurrent” in that the outputs from one step in the sequence are fed back into the network as inputs while processing the next step. This gives RNNs a form of memory, which is helpful for tasks like language modeling where each word depends on the previous words.
At each time step, an RNN takes in an input (like a word in a sentence) and produces an output (like a prediction of the next word). It also updates its internal state, which is a representation of what it has “seen” last in the sequence. This internal state is passed back into the network when processing the next input. As a result, the network can use information from previous steps to influence its predictions for the current step. This is what allows RNNs to effectively process sequential data.
GRU4Rec used recurrent neural networks to model session-based recommendations in one of the first applications of neural network architectures to the recommendation problem. A session refers to a single contiguous period of user-interaction, like time spent on a page without the user navigating away or turning off their computer.
Here we will see a very dramatic advantage of sequential recommendation systems: most traditional recommendation methods rely on an explicit user-id to build a user-interest profile. However, session-based recommendations operate over anonymous user sessions which are often quite short to allow for a profile modeling. Moreover, there can be a lot of variance in user motivations in different sessions. A solution via user-agnostic recommendation which works for such recommendation situations is an item-based model where an item-item similarity matrix is calculated based on items co-occurring within a single session. This pre-computed similarity matrix is employed at runtime to recommend the most similar item to the one last clicked. This approach has obvious limitations e.g. relying only on the last clicked item. To this end, GRU4Rec uses all of the items in the session, and models the session as a sequence of items. The task of recommending items to be added translates to the prediction of the next item in the sequence.
Unlike the small fixed-size vocabulary of languages, recommendation systems are required to reason over a large number of items which further grows over time as more items are added. To handle this concern, pairwise ranking losses (e.g. BPR) are considered. GRU4Rec is further extended in GRU4Rec+ which utilized a new loss function specifically designed for gains in Top-K recommendation. These loss functions blend deep learning and learning to rank to address neural recommendation settings.
A different approach to Neural Networks for recommendations adopted Convolutional Neural Networks (CNNs) for sequential recommendation. We won’t cover the basics of CNNs here, but you can consult this excellent overview for the essentials.
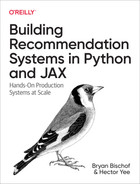
Let’s discuss one method which showed a lot of success, CosRec as visualized in Figure 17-1. This method (and others) starts with a similar structure as our Matrix Factorization which we’ve seen throughout most of the book: a user-item matrix. We assume that there are two latent factor matrices,

Figure 17-1. CosRec CNN
Attention Architectures
A term commonly associated with neural networks, and what may ring a bell for the reader by now, is attention. This is because Transformers, in particular the kind that appear in Large Language Models like the Generalized Pretrained Transformer, have become a central focus among AI users.
We will give an extremely brief, and less technical, introduction to self-attention and the transformer here. For a more complete guide on transformers, consult the excellent overview by Brandon Rohrer.
First, let’s state the key differentiating assumption about a transformer model: the embeddings are positional. This means that we’re hoping to not only learn one embedding for every item, but we wish to learn an embedding for every item-position pair. That means that when an article is the first in a session, vs. the last in a session, those are treated as two separate items.
Another important notion is the concept of stacking. When building transformers, we often think of the architecture built like layer cakes with sections stacked on top of one another. The key components are the embeddings, the self-attention layer, the skip-addition, and the feed-forward layer. The most complicated things happen in self-attention, so let’s focus on that first. We just discussed the positional embeddings, which are sent as a sequence of these embedding vectors – recall that a transformer is a sequence-to-sequence model! The skip-addition means that we push the embedding forward around the self-attention layer (and the feed-forward layer above) and add it to the positional output of the attention layer. The feed-forward layer is an unexciting Multi-layer perceptron which stays in the positional columns and uses a ReLU or GeLU activation.
A quick couple tips on self-attention:
-
The idea behind self-attention is that everything in the sequence effects everything else, in some manner
-
The self-attention layer is learning four weight matrices per head
-
The heads are in 1-1 correspondance with the sequence length
-
We often call the weight matrices
-
There are some normalizations but we’ll disregard them as inessential for understanding.
When I want to speak accurately, but briefly, about attention, I usually say: “it takes a sequence of positional embeddings, and mushes them all together to learn how they’re related.”
Self-Attentive Sequential Recommendation:
SASRec is the first transformer model we’ll consider. It is an auto-regressive sequential model (very similar to a causal language model) to predict the next user-interaction from the past user-interactions. Inspired by the success of the transformer models in sequential mining tasks, the self-attention based architecture is used for sequential recommendation.
When we say that the SASRec model is trained in an autoregressive manner we mean that the self-attention is only allowed to attend to the earlier positions in the sequence – looking into the future is not permitted. Earlier when we talk about the mushing, think of this as only mushing forward the influence. Some people call this “causal” because it respects the causal arrow of time. The model also allows for a learnable positional encoding, which means that the updates carry down to the embedding layer. This model used 2 transformer blocks.
BERT4Rec:
Inspired by the BERT model in NLP, BERT4Rec improved upon SASRec by training a bi-directional masked sequential (language) model.
While BERT used a masked language model for pre-training word embeddings, BERT4Rec used this architecture to train end-to-end recommendation system. It tries to predict the masked items in the user interaction sequence. Similar to the original BERT model, the self-attention is bidirectional i.e. it can look at both the past as well as future interactions in the action sequence. To prevent leakage of future information and to emulate the realistic settings, only the last item in the sequence is masked during inference. Using item masking, BERT4Rec outperforms SASRec, however a drawback of the BERT4Rec model is that it is quite compute intensive and requires much more training time.
Recency Sampling
Sequential recommendation and the adoption of transformer architecture in these tasks has seen a lot of interest recently. These deep neural network models like BERT4Rec and SASRec have shown improved performance over traditional approaches. However, these models suffer from slow training problems. A recently published paper – haha, get it – addresses the question of improving training efficiency while achieving state-of-the-art performance.
The two training paradigms we’ve just seen for sequential models are - autoregressive which tries to predict the next item in the user interaction sequence, and masked which tries to predict masked items in the interaction sequence. The autoregressive approach doesn’t use the beginning of the sequence as labels in the training process, and thus valuable information is lost. The masked approach on the other hand is only weakly related to the end goal of the sequential recommendation.
This paper, proposes a recency-based sampling of sequences which samples positive examples from the sequences to build the training data. The sampling is designed to give more recent interactions higher chances of being sampled. However, due to the probabilistic nature of the sampling mechanism, even the oldest of the interactions have non-zero chances of being chosen. An exponential function is employed as a sampling routine which interpolates between the masking-based sampling where each interaction has equal probability of being sampled and autoregressive sampling where items from the end of sequence are sampled. This showed superior performance in sequential recommendation tasks while requiring much less training time. Compare this approach to some of the other examples where we saw sampling provide significant improvements in training recommender systems!
Merging Static and Sequential
Pinterest recently released a paper describing their personalized recommendation system which is built to leverage raw user actions. The recommendation task is decomposed into modeling users’ long-term and short-term intentions.
The process of comprehending long-term user interests is accomplished by training an end-to-end embedding model, referred to as PinnerFormer, to learn from a user’s historical actions on the platform. These actions are subsequently transformed into user embeddings, which are designed for optimization based on anticipated long-term future user activities.
This procedure employs an adapted transformer model to operate on users’ sequential actions with the intent to forecast their long-term future activities. Each user’s activity is compiled into a sequence, encompassing their actions over a specific time window, such as one year. The Graph Neural Network-based (GNN-based) PinSage embeddings, in conjunction with relevant metadata (for example, the type of action, the timestamp, and so forth), are used to add features to each action in the sequence.
Distinct from traditional sequential modeling tasks and sequential recommendation systems, PinnerFormer is designed to predict extended future user activities rather than the immediately subsequent action. This objective is achieved by training the model to foresee a user’s positive future interactions over a window of 14 days following the embedding’s generation. In comparison, traditional sequential models would only anticipate the subsequent action.
This alternate approach allows for the embedding generation to occur offline in a batch processing mode, resulting in significant reductions in infrastructure needs. In contrast to most traditional sequential modeling systems, which operate in real-time and incur substantial computational and infrastructure costs, these embeddings can be produced in batches, for instance, on a daily basis, rather than every time a user performs an action.
A dense all-action loss is introduced in this methodology to facilitate batch training of the model. The objective here is not to predict the immediate next action but rather all the actions the user will undertake over the subsequent
Based on offline and online experimental results, the use of dense all-action loss to train for long-term user actions has significantly bridged the gap between batch generation and real-time generation of user embeddings. Moreover, to accommodate users’ short-term interests, the transformer model retrieves the most recent actions for each user in real-time, processing them along with the long-term user embeddings.
Summary
Transformers and sequential recommendation systems are really at the cutting edge of modern recommenders. These days, most research in Recommendation Systems is in the area of sequential datasets, and the hottest recommenders are using longer and longer sequences for prediction. Two very important references are worthy of attention:
-
Transformers4Rec is an open-source project geared at scalable transformer models by the NVIDIA Merlin team.
-
Monolith, or the Tiktok For You Page recommender, is one of the most popular and exciting recommendation systems at this time. It is a fundamentally sequential recommender, with some exciting hybrid approaches. This paper covers the architectural considerations.
Our final step before this book concludes, is to consider a few different approaches to recommendations. These don’t build exactly on top of what we’ve done, but will use some of what we’ve done and introduce a few new ideas. Let’s sprint to the finish!