
EFFICIENT C PROGRAMMING
5.1. OVERVIEW OF C COMPILERS AND OPTIMIZATION
5.9. UNALIGNED DATA AND ENDIANNESS
5.10.1. Repeated Unsigned Division with Remainder
5.10.2. Converting Divides into Multiplies
The aim of this chapter is to help you write C code in a style that will compile efficiently on the ARM architecture. We will look at many small examples to show how the compiler translates C source to ARM assembler. Once you have a feel for this translation process, you can distinguish fast C code from slow C code. The techniques apply equally to C++, but we will stick to plain C for these examples.
We start with an overview of C compilers and optimization, which will give an idea of the problems the C compiler faces when optimizing your code. By understanding these problems you can write source code that will compile more efficiently in terms of increased speed and reduced code size. The following sections are grouped by topic.
Sections 5.2 and 5.3 look at how to optimize a basic C loop. These sections use a data packet checksum as a simple example to illustrate the ideas. Sections 5.4 and 5.5 look at optimizing a whole C function body, including how the compiler allocates registers within a function and how to reduce the overhead of a function call.
Sections 5.6 through 5.9 look at memory issues, including handling pointers and how to pack data and access memory efficiently. Sections 5.10 through 5.12 look at basic operations that are usually not supported directly by ARM instructions. You can add your own basic operations using inline functions and assembler.
The final section summarizes problems you may face when porting C code from another architecture to the ARM architecture.
5.1 OVERVIEW OF C COMPILERS AND OPTIMIZATION
This chapter assumes that you are familiar with the C language and have some knowledge of assembly programming. The latter is not essential, but is useful for following the compiler output examples. See Chapter 3 or Appendix A for details of ARM assembly syntax.
Optimizing code takes time and reduces source code readability. Usually, it’s only worth optimizing functions that are frequently executed and important for performance. We recommend you use a performance profiling tool, found in most ARM simulators, to find these frequently executed functions. Document nonobvious optimizations with source code comments to aid maintainability.
C compilers have to translate your C function literally into assembler so that it works for all possible inputs. In practice, many of the input combinations are not possible or won’t occur. Let’s start by looking at an example of the problems the compiler faces. The memclr function clears N bytes of memory at address data.

No matter how advanced the compiler, it does not know whether N can be 0 on input or not. Therefore the compiler needs to test for this case explicitly before the first iteration of the loop.
The compiler doesn’t know whether the data array pointer is four-byte aligned or not. If it is four-byte aligned, then the compiler can clear four bytes at a time using an int store rather than a char store. Nor does it know whether N is a multiple of four or not. If N is a multiple of four, then the compiler can repeat the loop body four times or store four bytes at a time using an int store.
The compiler must be conservative and assume all possible values for N and all possible alignments for data. Section 5.3 discusses these specific points in detail.
To write efficient C code, you must be aware of areas where the C compiler has to be conservative, the limits of the processor architecture the C compiler is mapping to, and the limits of a specific C compiler.
Most of this chapter covers the first two points above and should be applicable to any ARM C compiler. The third point will be very dependent on the compiler vendor and compiler revision. You will need to look at the compiler’s documentation or experiment with the compiler yourself.
To keep our examples concrete, we have tested them using the following specific C compilers:
![]() armcc from ARM Developer Suite version 1.1 (ADS1.1). You can license this compiler, or a later version, directly from ARM.
armcc from ARM Developer Suite version 1.1 (ADS1.1). You can license this compiler, or a later version, directly from ARM.
![]() arm-elf-gcc version 2.95.2. This is the ARM target for the GNU C compiler, gcc, and is freely available.
arm-elf-gcc version 2.95.2. This is the ARM target for the GNU C compiler, gcc, and is freely available.
We have used armcc from ADS1.1 to generate the example assembler output in this book. The following short script shows you how to invoke armcc on a C file test.c. You can use this to reproduce our examples.
![]()
By default armcc has full optimizations turned on (the -02 command line switch). The -0time switch optimizes for execution efficiency rather than space and mainly affects the layout of for and while loops. If you are using the gcc compiler, then the following short script generates a similar assembler output listing:
![]()
Full optimizations are turned off by default for the GNU compiler. The -fomit-frame-pointer switch prevents the GNU compiler from maintaining a frame pointer register. Frame pointers assist the debug view by pointing to the local variables stored on the stack frame. However, they are inefficient to maintain and shouldn’t be used in code critical to performance.
5.2 BASIC C DATA TYPES
Let’s start by looking at how ARM compilers handle the basic C data types. We will see that some of these types are more efficient to use for local variables than others. There are also differences between the addressing modes available when loading and storing data of each type.
ARM processors have 32-bit registers and 32-bit data processing operations. The ARM architecture is a RISC load/store architecture. In other words you must load values from memory into registers before acting on them. There are no arithmetic or logical instructions that manipulate values in memory directly.
Early versions of the ARM architecture (ARMv1 to ARMv3) provided hardware support for loading and storing unsigned 8-bit and unsigned or signed 32-bit values. These architectures were used on processors prior to the ARM7TDMI. Table 5.1 shows the load/store instruction classes available by ARM architecture.
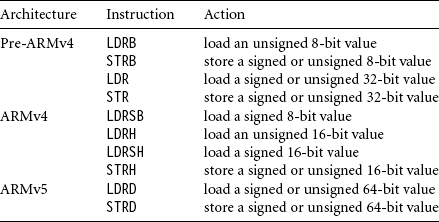
In Table 5.1 loads that act on 8- or 16-bit values extend the value to 32 bits before writing to an ARM register. Unsigned values are zero-extended, and signed values sign-extended. This means that the cast of a loaded value to an int type does not cost extra instructions. Similarly, a store of an 8- or 16-bit value selects the lowest 8 or 16 bits of the register. The cast of an int to smaller type does not cost extra instructions on a store.
The ARMv4 architecture and above support signed 8-bit and 16-bit loads and stores directly, through new instructions. Since these instructions are a later addition, they do not support as many addressing modes as the pre-ARMv4 instructions. (See Section 3.3 for details of the different addressing modes.) We will see the effect of this in the example checksum_v3 in Section 5.2.1.
Finally, ARMv5 adds instruction support for 64-bit load and stores. This is available in ARM9E and later cores.
Prior to ARMv4, ARM processors were not good at handling signed 8-bit or any 16-bit values. Therefore ARM C compilers define char to be an unsigned 8-bit value, rather than a signed 8-bit value as is typical in many other compilers.
Compilers armcc and gcc use the datatype mappings in Table 5.2 for an ARM target. The exceptional case for type char is worth noting as it can cause problems when you are porting code from another processor architecture. A common example is using a char type variable i as a loop counter, with loop continuation condition i ≥ 0. As i is unsigned for the ARM compilers, the loop will never terminate. Fortunately armcc produces a warning in this situation: unsigned comparison with 0. Compilers also provide an override switch to make char signed. For example, the command line option -fsigned-char will make char signed on gcc. The command line option -zc will have the same effect with armcc.
Table 5.2
| C Data Type | Implementation |
| char | unsigned 8-bit byte |
| short | signed 16-bit halfword |
| int | signed 32-bit word |
| long | signed 32-bit word |
| long long | signed 64-bit double word |
For the rest of this book we assume that you are using an ARMv4 processor or above. This includes ARM7TDMI and all later processors.
5.2.1 LOCAL VARIABLE TYPES
ARMv4-based processors can efficiently load and store 8-, 16-, and 32-bit data. However, most ARM data processing operations are 32-bit only. For this reason, you should use a 32-bit datatype, int or long, for local variables wherever possible. Avoid using char and short as local variable types, even if you are manipulating an 8- or 16-bit value. The one exception is when you want wrap-around to occur. If you require modulo arithmetic of the form 255 + 1 = 0, then use the char type.
To see the effect of local variable types, let’s consider a simple example. We’ll look in detail at a checksum function that sums the values in a data packet. Most communication protocols (such as TCP/IP) have a checksum or cyclic redundancy check (CRC) routine to check for errors in a data packet.
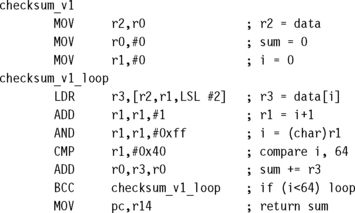
The following code checksums a data packet containing 64 words. It shows why you should avoid using char for local variables.

At first sight it looks as though declaring i as a char is efficient. You may be thinking that a char uses less register space or less space on the ARM stack than an int. On the ARM, both these assumptions are wrong. All ARM registers are 32-bit and all stack entries are at least 32-bit. Furthermore, to implement the i++ exactly, the compiler must account for the case when i = 255. Any attempt to increment 255 should produce the answer 0.
Consider the compiler output for this function. We’ve added labels and comments to make the assembly clear.
Now compare this to the compiler output where instead we declare i as an unsigned int.
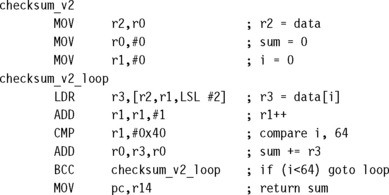
In the first case, the compiler inserts an extra AND instruction to reduce i to the range 0 to 255 before the comparison with 64. This instruction disappears in the second case.
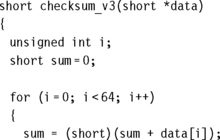
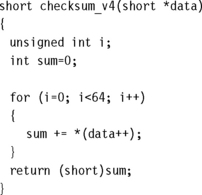
Next, suppose the data packet contains 16-bit values and we need a 16-bit checksum. It is tempting to write the following C code:
![]()
You may wonder why the for loop body doesn’t contain the code
![]()
With armcc this code will produce a warning if you enable implicit narrowing cast warnings using the compiler switch -W + n. The expression sum + data[i] is an integer and so can only be assigned to a short using an (implicit or explicit) narrowing cast. As you can see in the following assembly output, the compiler must insert extra instructions to implement the narrowing cast:

The loop is now three instructions longer than the loop for example checksum_v2 earlier! There are two reasons for the extra instructions:
![]() The LDRH instruction does not allow for a shifted address offset as the LDR instruction did in checksum_v2. Therefore the first ADD in the loop calculates the address of item i in the array. The LDRH loads from an address with no offset. LDRH has fewer addressing modes than LDR as it was a later addition to the ARM instruction set. (See Table 5.1.)
The LDRH instruction does not allow for a shifted address offset as the LDR instruction did in checksum_v2. Therefore the first ADD in the loop calculates the address of item i in the array. The LDRH loads from an address with no offset. LDRH has fewer addressing modes than LDR as it was a later addition to the ARM instruction set. (See Table 5.1.)
![]() The cast reducing total +array[i] to a short requires two MOV instructions. The compiler shifts left by 16 and then right by 16 to implement a 16-bit sign extend. The shift right is a sign-extending shift so it replicates the sign bit to fill the upper 16 bits.
The cast reducing total +array[i] to a short requires two MOV instructions. The compiler shifts left by 16 and then right by 16 to implement a 16-bit sign extend. The shift right is a sign-extending shift so it replicates the sign bit to fill the upper 16 bits.
We can avoid the second problem by using an int type variable to hold the partial sum. We only reduce the sum to a short type at the function exit.
However, the first problem is a new issue. We can solve it by accessing the array by incrementing the pointer data rather than using an index as in data[i]. This is efficient regardless of array type size or element size. All ARM load and store instructions have a postincrement addressing mode.
EXAMPLE 5.1
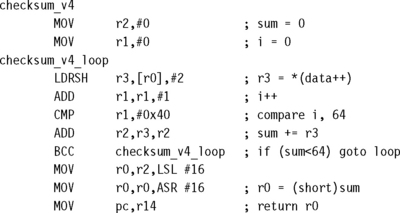
The checksum_v4 code fixes all the problems we have discussed in this section. It uses int type local variables to avoid unnecessary casts. It increments the pointer data instead of using an index offset data[i].
The *(data++) operation translates to a single ARM instruction that loads the data and increments the data pointer. Of course you could write sum += *data; data++; or even *data++ instead if you prefer. The compiler produces the following output. Three instructions have been removed from the inside loop, saving three cycles per loop compared to checksum_v3.
The compiler is still performing one cast to a 16-bit range, on the function return. You could remove this also by returning an int result as discussed in Section 5.2.2.
5.2.2 FUNCTION ARGUMENT TYPES
We saw in Section 5.2.1 that converting local variables from types char or short to type int increases performance and reduces code size. The same holds for function arguments. Consider the following simple function, which adds two 16-bit values, halving the second, and returns a 16-bit sum:
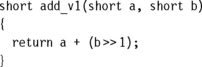
This function is a little artificial, but it is a useful test case to illustrate the problems faced by the compiler. The input values a, b, and the return value will be passed in 32-bit ARM registers. Should the compiler assume that these 32-bit values are in the range of a short type, that is, −32,768 to +32,767? Or should the compiler force values to be in this range by sign-extending the lowest 16 bits to fill the 32-bit register? The compiler must make compatible decisions for the function caller and callee. Either the caller or callee must perform the cast to a short type.
We say that function arguments are passed wide if they are not reduced to the range of the type and narrow if they are. You can tell which decision the compiler has made by looking at the assembly output for add_v1. If the compiler passes arguments wide, then the callee must reduce function arguments to the correct range. If the compiler passes arguments narrow, then the caller must reduce the range. If the compiler returns values wide, then the caller must reduce the return value to the correct range. If the compiler returns values narrow, then the callee must reduce the range before returning the value.
For armcc in ADS, function arguments are passed narrow and values returned narrow. In other words, the caller casts argument values and the callee casts return values. The compiler uses the ANSI prototype of the function to determine the datatypes of the function arguments.
The armcc output for add_v1 shows that the compiler casts the return value to a short type, but does not cast the input values. It assumes that the caller has already ensured that the 32-bit values r0 and r1 are in the range of the short type. This shows narrow passing of arguments and return value.

The gcc compiler we used is more cautious and makes no assumptions about the range of argument value. This version of the compiler reduces the input arguments to the range of a short in both the caller and the callee. It also casts the return value to a short type. Here is the compiled code for add_v1:

Whatever the merits of different narrow and wide calling protocols, you can see that char or short type function arguments and return values introduce extra casts. These increase code size and decrease performance. It is more efficient to use the int type for function arguments and return values, even if you are only passing an 8-bit value.
5.2.3 SIGNED VERSUS UNSIGNED TYPES
The previous sections demonstrate the advantages of using int rather than a char or short type for local variables and function arguments. This section compares the efficiencies of signed int and unsigned int.
If your code uses addition, subtraction, and multiplication, then there is no performance difference between signed and unsigned operations. However, there is a difference when it comes to division. Consider the following short example that averages two integers:
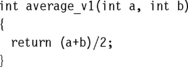
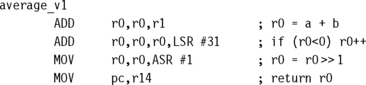
Notice that the compiler adds one to the sum before shifting by right if the sum is negative. In other words it replaces x/2 by the statement:
![]()
It must do this because x is signed. In C on an ARM target, a divide by two is not a right shift if x is negative. For example, −3 ![]() 1 = –2 but −3/2 = –1. Division rounds towards zero, but arithmetic right shift rounds towards –∞.
1 = –2 but −3/2 = –1. Division rounds towards zero, but arithmetic right shift rounds towards –∞.
It is more efficient to use unsigned types for divisions. The compiler converts unsigned power of two divisions directly to right shifts. For general divisions, the divide routine in the C library is faster for unsigned types. See Section 5.10 for discussion on avoiding divisions completely.
SUMMARY: The Efficient Use of C Types
![]() For local variables held in registers, don’t use a char or short type unless 8-bit or 16-bit modular arithmetic is necessary. Use the signed or unsigned int types instead. Unsigned types are faster when you use divisions.
For local variables held in registers, don’t use a char or short type unless 8-bit or 16-bit modular arithmetic is necessary. Use the signed or unsigned int types instead. Unsigned types are faster when you use divisions.
![]() For array entries and global variables held in main memory, use the type with the smallest size possible to hold the required data. This saves memory footprint. The ARMv4 architecture is efficient at loading and storing all data widths provided you traverse arrays by incrementing the array pointer. Avoid using offsets from the base of the array with short type arrays, as LDRH does not support this.
For array entries and global variables held in main memory, use the type with the smallest size possible to hold the required data. This saves memory footprint. The ARMv4 architecture is efficient at loading and storing all data widths provided you traverse arrays by incrementing the array pointer. Avoid using offsets from the base of the array with short type arrays, as LDRH does not support this.
![]() Use explicit casts when reading array entries or global variables into local variables, or writing local variables out to array entries. The casts make it clear that for fast operation you are taking a narrow width type stored in memory and expanding it to a wider type in the registers. Switch on implicit narrowing cast warnings in the compiler to detect implicit casts.
Use explicit casts when reading array entries or global variables into local variables, or writing local variables out to array entries. The casts make it clear that for fast operation you are taking a narrow width type stored in memory and expanding it to a wider type in the registers. Switch on implicit narrowing cast warnings in the compiler to detect implicit casts.
![]() Avoid implicit or explicit narrowing casts in expressions because they usually cost extra cycles. Casts on loads or stores are usually free because the load or store instruction performs the cast for you.
Avoid implicit or explicit narrowing casts in expressions because they usually cost extra cycles. Casts on loads or stores are usually free because the load or store instruction performs the cast for you.
![]() Avoid char and short types for function arguments or return values. Instead use the int type even if the range of the parameter is smaller. This prevents the compiler performing unnecessary casts.
Avoid char and short types for function arguments or return values. Instead use the int type even if the range of the parameter is smaller. This prevents the compiler performing unnecessary casts.
5.3 C LOOPING STRUCTURES
This section looks at the most efficient ways to code for and while loops on the ARM. We start by looking at loops with a fixed number of iterations and then move on to loops with a variable number of iterations. Finally we look at loop unrolling.
5.3.1 LOOPS WITH A FIXED NUMBER OF ITERATIONS
What is the most efficient way to write a for loop on the ARM? Let’s return to our checksum example and look at the looping structure.
Here is the last version of the 64-word packet checksum routine we studied in Section 5.2. This shows how the compiler treats a loop with incrementing count i++.

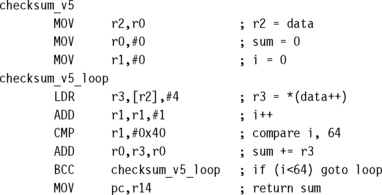
It takes three instructions to implement the for loop structure:
This is not efficient. On the ARM, a loop should only use two instructions:
The key point is that the loop counter should count down to zero rather than counting up to some arbitrary limit. Then the comparison with zero is free since the result is stored in the condition flags. Since we are no longer using i as an array index, there is no problem in counting down rather than up.
EXAMPLE 5.2
This example shows the improvement if we switch to a decrementing loop rather than an incrementing loop.
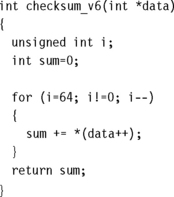
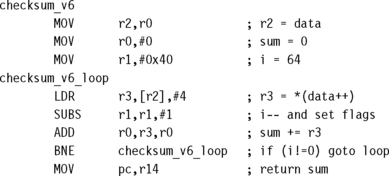
The SUBS and BNE instructions implement the loop. Our checksum example now has the minimum number of four instructions per loop. This is much better than six for checksum_v1 and eight for checksum_v3.
For an unsigned loop counter i we can use either of the loop continuation conditions i!=0 or i>0. As i can’t be negative, they are the same condition. For a signed loop counter, it is tempting to use the condition i>0 to continue the loop. You might expect the compiler to generate the following two instructions to implement the loop:
![]()
In fact, the compiler will generate
![]()
The compiler is not being inefficient. It must be careful about the case when i = -0x80000000 because the two sections of code generate different answers in this case. For the first piece of code the SUBS instruction compares i with 1 and then decrements i. Since -0x80000000 < 1, the loop terminates. For the second piece of code, we decrement i and then compare with 0. Modulo arithmetic means that i now has the value +0x7fffffff, which is greater than zero. Thus the loop continues for many iterations.
Of course, in practice, i rarely takes the value -0x80000000. The compiler can’t usually determine this, especially if the loop starts with a variable number of iterations (see Section 5.3.2).
Therefore you should use the termination condition i!=0 for signed or unsigned loop counters. It saves one instruction over the condition i>0 for signed i.
5.3.2 LOOPS USING A VARIABLE NUMBER OF ITERATIONS
Now suppose we want our checksum routine to handle packets of arbitrary size. We pass in a variable N giving the number of words in the data packet. Using the lessons from the last section we count down until N = 0 and don’t require an extra loop counter i.
The checksum_v7 example shows how the compiler handles a for loop with a variable number of iterations N.
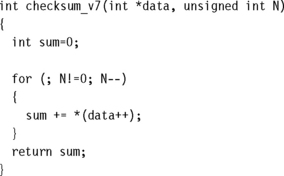

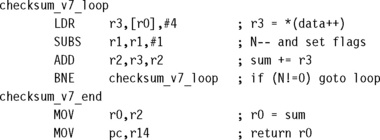
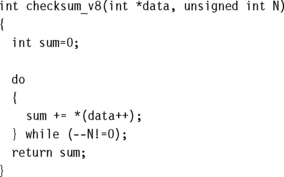
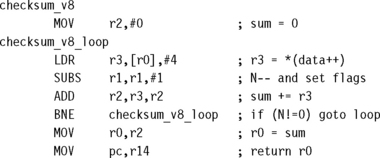
Notice that the compiler checks that N is nonzero on entry to the function. Often this check is unnecessary since you know that the array won’t be empty. In this case a do-while loop gives better performance and code density than a for loop.
5.3.3 LOOP UNROLLING
We saw in Section 5.3.1 that each loop iteration costs two instructions in addition to the body of the loop: a subtract to decrement the loop count and a conditional branch. We call these instructions the loop overhead. On ARM7 or ARM9 processors the subtract takes one cycle and the branch three cycles, giving an overhead of four cycles per loop.
You can save some of these cycles by unrolling a loop—repeating the loop body several times, and reducing the number of loop iterations by the same proportion. For example, let’s unroll our packet checksum example four times.
EXAMPLE 5.4
The following code unrolls our packet checksum loop by four times. We assume that the number of words in the packet N is a multiple of four.
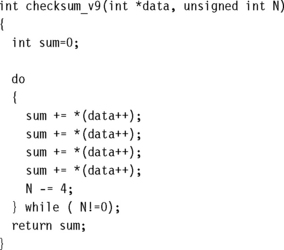
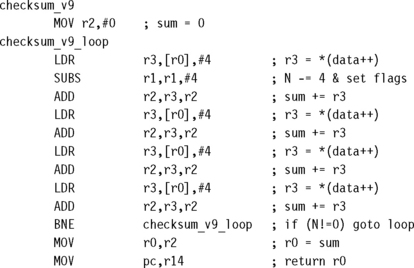
We have reduced the loop overhead from 4N cycles to (4N)/4 = N cycles. On the ARM7TDMI, this accelerates the loop from 8 cycles per accumulate to 20/4 = 5 cycles per accumulate, nearly doubling the speed! For the ARM9TDMI, which has a faster load instruction, the benefit is even higher.
There are two questions you need to ask when unrolling a loop:
![]() How many times should I unroll the loop?
How many times should I unroll the loop?
![]() What if the number of loop iterations is not a multiple of the unroll amount? For example, what if N is not a multiple of four in checksum_v9?
What if the number of loop iterations is not a multiple of the unroll amount? For example, what if N is not a multiple of four in checksum_v9?
To start with the first question, only unroll loops that are important for the overall performance of the application. Otherwise unrolling will increase the code size with little performance benefit. Unrolling may even reduce performance by evicting more important code from the cache.
Suppose the loop is important, for example, 30% of the entire application. Suppose you unroll the loop until it is 0.5 KB in code size (128 instructions). Then the loop overhead is at most 4 cycles compared to a loop body of around 128 cycles. The loop overhead cost is 3/128, roughly 3%. Recalling that the loop is 30% of the entire application, overall the loop overhead is only 1%. Unrolling the code further gains little extra performance, but has a significant impact on the cache contents. It is usually not worth unrolling further when the gain is less than 1%.
For the second question, try to arrange it so that array sizes are multiples of your unroll amount. If this isn’t possible, then you must add extra code to take care of the leftover cases. This increases the code size a little but keeps the performance high.
EXAMPLE 5.5
This example handles the checksum of any size of data packet using a loop that has been unrolled four times.

The second for loop handles the remaining cases when N is not a multiple of four. Note that both N/4 and N&3 can be zero, so we can’t use do-while loops.
SUMMARY: Writing Loops Efficiently
![]() Use loops that count down to zero. Then the compiler does not need to allocate a register to hold the termination value, and the comparison with zero is free.
Use loops that count down to zero. Then the compiler does not need to allocate a register to hold the termination value, and the comparison with zero is free.
![]() Use unsigned loop counters by default and the continuation condition i!=0 rather than i>0. This will ensure that the loop overhead is only two instructions.
Use unsigned loop counters by default and the continuation condition i!=0 rather than i>0. This will ensure that the loop overhead is only two instructions.
![]() Use do-while loops rather than for loops when you know the loop will iterate at least once. This saves the compiler checking to see if the loop count is zero.
Use do-while loops rather than for loops when you know the loop will iterate at least once. This saves the compiler checking to see if the loop count is zero.
![]() Unroll important loops to reduce the loop overhead. Do not overunroll. If the loop overhead is small as a proportion of the total, then unrolling will increase code size and hurt the performance of the cache.
Unroll important loops to reduce the loop overhead. Do not overunroll. If the loop overhead is small as a proportion of the total, then unrolling will increase code size and hurt the performance of the cache.
![]() Try to arrange that the number of elements in arrays are multiples of four or eight. You can then unroll loops easily by two, four, or eight times without worrying about the leftover array elements.
Try to arrange that the number of elements in arrays are multiples of four or eight. You can then unroll loops easily by two, four, or eight times without worrying about the leftover array elements.
5.4 REGISTER ALLOCATION
The compiler attempts to allocate a processor register to each local variable you use in a C function. It will try to use the same register for different local variables if the use of the variables do not overlap. When there are more local variables than available registers, the compiler stores the excess variables on the processor stack. These variables are called spilled or swapped out variables since they are written out to memory (in a similar way virtual memory is swapped out to disk). Spilled variables are slow to access compared to variables allocated to registers.
To implement a function efficiently, you need to
![]() minimize the number of spilled variables
minimize the number of spilled variables
![]() ensure that the most important and frequently accessed variables are stored in registers
ensure that the most important and frequently accessed variables are stored in registers
First let’s look at the number of processor registers the ARM C compilers have available for allocating variables. Table 5.3 shows the standard register names and usage when following the ARM-Thumb procedure call standard (ATPCS), which is used in code generated by C compilers.
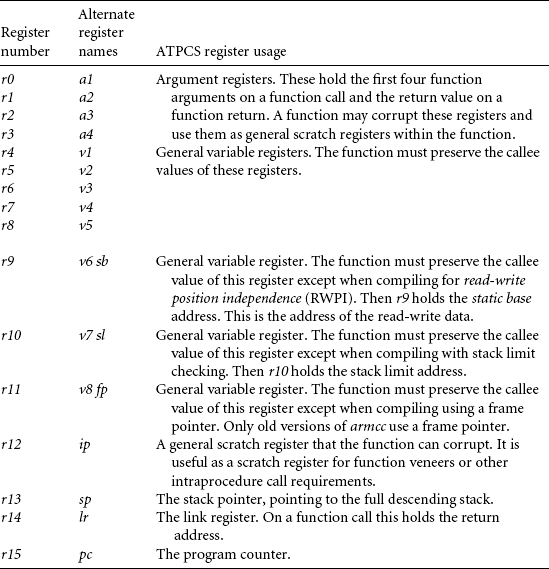
Provided the compiler is not using software stack checking or a frame pointer, then the C compiler can use registers r0 to r12 and r14 to hold variables. It must save the callee values of r4 to r11 and r14 on the stack if using these registers.
In theory, the C compiler can assign 14 variables to registers without spillage. In practice, some compilers use a fixed register such as r12 for intermediate scratch working and do not assign variables to this register. Also, complex expressions require intermediate working registers to evaluate. Therefore, to ensure good assignment to registers, you should try to limit the internal loop of functions to using at most 12 local variables.
If the compiler does need to swap out variables, then it chooses which variables to swap out based on frequency of use. A variable used inside a loop counts multiple times. You can guide the compiler as to which variables are important by ensuring these variables are used within the innermost loop.
The register keyword in C hints that a compiler should allocate the given variable to a register. However, different compilers treat this keyword in different ways, and different architectures have a different number of available registers (for example, Thumb and ARM). Therefore we recommend that you avoid using register and rely on the compiler’s normal register allocation routine.
SUMMARY: Efficient Register Allocation
![]() Try to limit the number of local variables in the internal loop of functions to 12. The compiler should be able to allocate these to ARM registers.
Try to limit the number of local variables in the internal loop of functions to 12. The compiler should be able to allocate these to ARM registers.
![]() You can guide the compiler as to which variables are important by ensuring these variables are used within the innermost loop.
You can guide the compiler as to which variables are important by ensuring these variables are used within the innermost loop.
5.5 FUNCTION CALLS
The ARM Procedure Call Standard (APCS) defines how to pass function arguments and return values in ARM registers. The more recent ARM-Thumb Procedure Call Standard (ATPCS) covers ARM and Thumb interworking as well.
The first four integer arguments are passed in the first four ARM registers: r0, r1, r2, and r3. Subsequent integer arguments are placed on the full descending stack, ascending in memory as in Figure 5.1. Function return integer values are passed in r0.
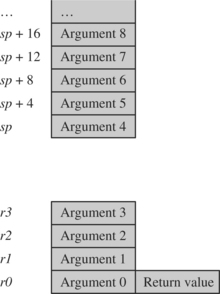
This description covers only integer or pointer arguments. Two-word arguments such as long long or double are passed in a pair of consecutive argument registers and returned in r0, r1. The compiler may pass structures in registers or by reference according to command line compiler options.
The first point to note about the procedure call standard is the four-register rule. Functions with four or fewer arguments are far more efficient to call than functions with five or more arguments. For functions with four or fewer arguments, the compiler can pass all the arguments in registers. For functions with more arguments, both the caller and callee must access the stack for some arguments. Note that for C++ the first argument to an object method is the this pointer. This argument is implicit and additional to the explicit arguments.
If your C function needs more than four arguments, or your C++ method more than three explicit arguments, then it is almost always more efficient to use structures. Group related arguments into structures, and pass a structure pointer rather than multiple arguments. Which arguments are related will depend on the structure of your software.
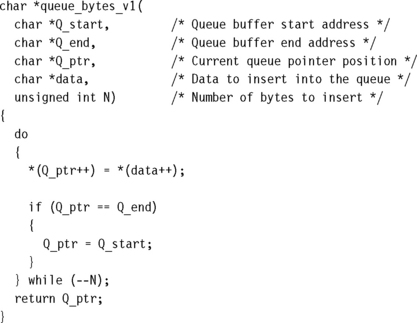
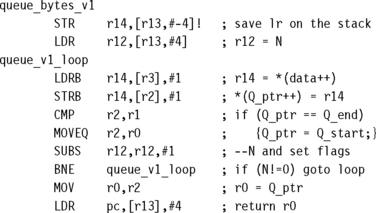
The next example illustrates the benefits of using a structure pointer. First we show a typical routine to insert N bytes from array data into a queue. We implement the queue using a cyclic buffer with start address Q_start (inclusive) and end address Q_end (exclusive).
Compare this with a more structured approach using three function arguments.
EXAMPLE 5.6
The following code creates a Queue structure and passes this to the function to reduce the number of function arguments.
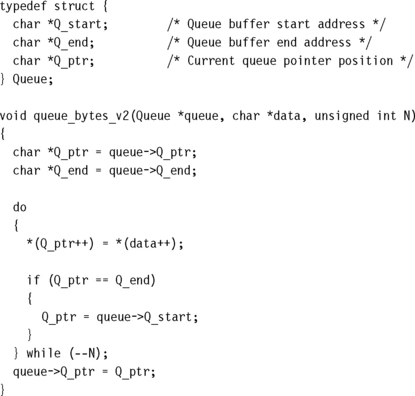
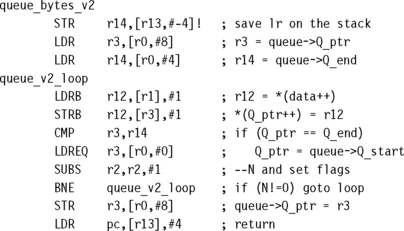
The queue_bytes_v2 is one instruction longer than queue_bytes_v1, but it is in fact more efficient overall. The second version has only three function arguments rather than five. Each call to the function requires only three register setups. This compares with four register setups, a stack push, and a stack pull for the first version. There is a net saving of two instructions in function call overhead. There are likely further savings in the callee function, as it only needs to assign a single register to the Queue structure pointer, rather than three registers in the nonstructured case.
There are other ways of reducing function call overhead if your function is very small and corrupts few registers (uses few local variables). Put the C function in the same C file as the functions that will call it. The C compiler then knows the code generated for the callee function and can make optimizations in the caller function:
![]() The caller function need not preserve registers that it can see the callee doesn’t corrupt. Therefore the caller function need not save all the ATPCS corruptible registers.
The caller function need not preserve registers that it can see the callee doesn’t corrupt. Therefore the caller function need not save all the ATPCS corruptible registers.
![]() If the callee function is very small, then the compiler can inline the code in the caller function. This removes the function call overhead completely.
If the callee function is very small, then the compiler can inline the code in the caller function. This removes the function call overhead completely.
EXAMPLE 5.7
The function uint_to_hex converts a 32-bit unsigned integer into an array of eight hexadecimal digits. It uses a helper function nybble_to_hex, which converts a digit d in the range 0 to 15 to a hexadecimal digit.
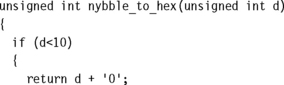
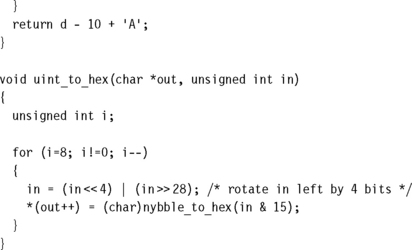
When we compile this, we see that uint_to_hex doesn’t call nybble_to_hex at all! In the following compiled code, the compiler has inlined the uint_to_hex code. This is more efficient than generating a function call.
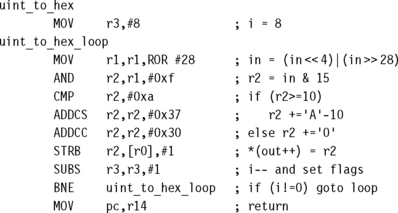
The compiler will only inline small functions. You can ask the compiler to inline a function using the __inline keyword, although this keyword is only a hint and the compiler may ignore it (see Section 5.12 for more on inline functions). Inlining large functions can lead to big increases in code size without much performance improvement.
SUMMARY: Calling Functions Efficiently
![]() Try to restrict functions to four arguments. This will make them more efficient to call. Use structures to group related arguments and pass structure pointers instead of multiple arguments.
Try to restrict functions to four arguments. This will make them more efficient to call. Use structures to group related arguments and pass structure pointers instead of multiple arguments.
![]() Define small functions in the same source file and before the functions that call them. The compiler can then optimize the function call or inline the small function.
Define small functions in the same source file and before the functions that call them. The compiler can then optimize the function call or inline the small function.
![]() Critical functions can be inlined using the __inline keyword.
Critical functions can be inlined using the __inline keyword.
5.6 POINTER ALIASING
Two pointers are said to alias when they point to the same address. If you write to one pointer, it will affect the value you read from the other pointer. In a function, the compiler often doesn’t know which pointers can alias and which pointers can’t. The compiler must be very pessimistic and assume that any write to a pointer may affect the value read from any other pointer, which can significantly reduce code efficiency.
Let’s start with a very simple example. The following function increments two timer values by a step amount:

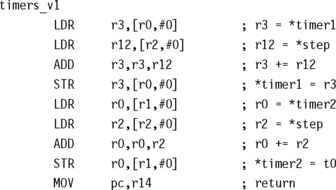
Note that the compiler loads from step twice. Usually a compiler optimization called common subexpression elimination would kick in so that *step was only evaluated once, and the value reused for the second occurrence. However, the compiler can’t use this optimization here. The pointers timer1 and step might alias one another. In other words, the compiler cannot be sure that the write to timer1 doesn’t affect the read from step. In this case the second value of *step is different from the first and has the value *timer1. This forces the compiler to insert an extra load instruction.
The same problem occurs if you use structure accesses rather than direct pointer access. The following code also compiles inefficiently:
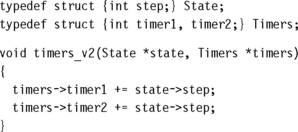
The compiler evaluates state->step twice in case state->step and timers->timer1 are at the same memory address. The fix is easy: Create a new local variable to hold the value of state->step so the compiler only performs a single load.
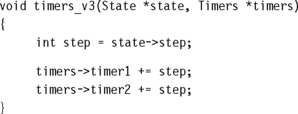
EXAMPLE 5.8
In the code for timers_v3 we use a local variable step to hold the value of state->step. Now the compiler does not need to worry that state may alias with timers.
You must also be careful of other, less obvious situations where aliasing may occur. When you call another function, this function may alter the state of memory and so change the values of any expressions involving memory reads. The compiler will evaluate the expressions again. For example suppose you read state->step, call a function and then read state->step again. The compiler must assume that the function could change the value of state->step in memory. Therefore it will perform two reads, rather than reusing the first value it read for state->step.
Another pitfall is to take the address of a local variable. Once you do this, the variable is referenced by a pointer and so aliasing can occur with other pointers. The compiler is likely to keep reading the variable from the stack in case aliasing occurs. Consider the following example, which reads and then checksums a data packet:
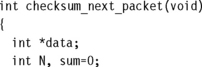
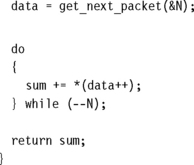
Here get_next_packet is a function returning the address and size of the next data packet. The previous code compiles to
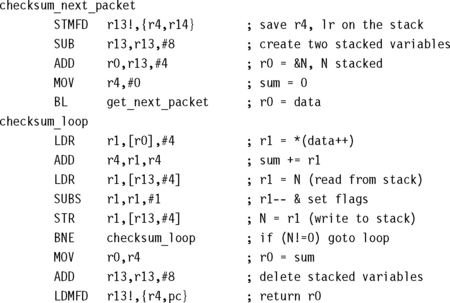
Note how the compiler reads and writes N from the stack for every N–. Once you take the address of N and pass it to get_next_packet, the compiler needs to worry about aliasing because the pointers data and &N may alias. To avoid this, don’t take the address of local variables. If you must do this, then copy the value into another local variable before use.
You may wonder why the compiler makes room for two stacked variables when it only uses one. This is to keep the stack eight-byte aligned, which is required for LDRD instructions available in ARMv5TE. The example above doesn’t actually use an LDRD, but the compiler does not know whether get_next_packet will use this instruction.
SUMMARY: Avoiding Pointer Aliasing
![]() Do not rely on the compiler to eliminate common subexpressions involving memory accesses. Instead create new local variables to hold the expression. This ensures the expression is evaluated only once.
Do not rely on the compiler to eliminate common subexpressions involving memory accesses. Instead create new local variables to hold the expression. This ensures the expression is evaluated only once.
![]() Avoid taking the address of local variables. The variable may be inefficient to access from then on.
Avoid taking the address of local variables. The variable may be inefficient to access from then on.
5.7 STRUCTURE ARRANGEMENT
The way you lay out a frequently used structure can have a significant impact on its performance and code density. There are two issues concerning structures on the ARM: alignment of the structure entries and the overall size of the structure.
For architectures up to and including ARMv5TE, load and store instructions are only guaranteed to load and store values with address aligned to the size of the access width. Table 5.4 summarizes these restrictions.
Table 5.4
Load and store alignment restrictions for ARMv5TE.
| Transfer size | Instruction | Byte address |
| 1 byte | LDRB, LDRSB, STRB | any byte address alignment |
| 2 bytes | LDRH, LDRSH, STRH | multiple of 2 bytes |
| 4 bytes | LDR, STR | multiple of 4 bytes |
| 8 bytes | LDRD, STRD | multiple of 8 bytes |
For this reason, ARM compilers will automatically align the start address of a structure to a multiple of the largest access width used within the structure (usually four or eight bytes) and align entries within structures to their access width by inserting padding.
For example, consider the structure

For a little-endian memory system the compiler will lay this out adding padding to ensure that the next object is aligned to the size of that object:
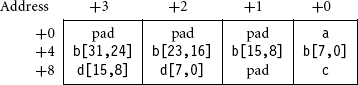
To improve the memory usage, you should reorder the elements
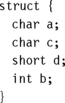
This reduces the structure size from 12 bytes to 8 bytes, with the following new layout:

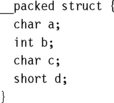
Therefore, it is a good idea to group structure elements of the same size, so that the structure layout doesn’t contain unnecessary padding. The armcc compiler does include a keyword __packed that removes all padding. For example, the structure

However, packed structures are slow and inefficient to access. The compiler emulates unaligned load and store operations by using several aligned accesses with data operations to merge the results. Only use the __packed keyword where space is far more important than speed and you can’t reduce padding by rearragement. Also use it for porting code that assumes a certain structure layout in memory.
The exact layout of a structure in memory may depend on the compiler vendor and compiler version you use. In API (Application Programmer Interface) definitions it is often a good idea to insert any padding that you cannot get rid of into the structure manually. This way the structure layout is not ambiguous. It is easier to link code between compiler versions and compiler vendors if you stick to unambiguous structures.
Another point of ambiguity is enum. Different compilers use different sizes for an enumerated type, depending on the range of the enumeration. For example, consider the type

The armcc in ADS1.1 will treat Bool as a one-byte type as it only uses the values 0 and 1. Bool will only take up 8 bits of space in a structure. However, gcc will treat Bool as a word and take up 32 bits of space in a structure. To avoid ambiguity it is best to avoid using enum types in structures used in the API to your code.
Another consideration is the size of the structure and the offsets of elements within the structure. This problem is most acute when you are compiling for the Thumb instruction set. Thumb instructions are only 16 bits wide and so only allow for small element offsets from a structure base pointer. Table 5.5 shows the load and store base register offsets available in Thumb.
Table 5.5
| Instructions | Offset available from the base register |
| LDRB, LDRSB, STRB | 0 to 31 bytes |
| LDRH, LDRSH, STRH | 0 to 31 halfwords (0 to 62 bytes) |
| LDR, STR | 0 to 31 words (0 to 124 bytes) |
Therefore the compiler can only access an 8-bit structure element with a single instruction if it appears within the first 32 bytes of the structure. Similarly, single instructions can only access 16-bit values in the first 64 bytes and 32-bit values in the first 128 bytes. Once you exceed these limits, structure accesses become inefficient.
The following rules generate a structure with the elements packed for maximum efficiency:
![]() Place all 8-bit elements at the start of the structure.
Place all 8-bit elements at the start of the structure.
![]() Place all 16-bit elements next, then 32-bit, then 64-bit.
Place all 16-bit elements next, then 32-bit, then 64-bit.
![]() Place all arrays and larger elements at the end of the structure.
Place all arrays and larger elements at the end of the structure.
![]() If the structure is too big for a single instruction to access all the elements, then group the elements into substructures. The compiler can maintain pointers to the individual substructures.
If the structure is too big for a single instruction to access all the elements, then group the elements into substructures. The compiler can maintain pointers to the individual substructures.
SUMMARY: Efficient Structure Arrangement
![]() Lay structures out in order of increasing element size. Start the structure with the smallest elements and finish with the largest.
Lay structures out in order of increasing element size. Start the structure with the smallest elements and finish with the largest.
![]() Avoid very large structures. Instead use a hierarchy of smaller structures.
Avoid very large structures. Instead use a hierarchy of smaller structures.
![]() For portability, manually add padding (that would appear implicitly) into API structures so that the layout of the structure does not depend on the compiler.
For portability, manually add padding (that would appear implicitly) into API structures so that the layout of the structure does not depend on the compiler.
![]() Beware of using enum types in API structures. The size of an enum type is compiler dependent.
Beware of using enum types in API structures. The size of an enum type is compiler dependent.
5.8 BIT-FIELDS
Bit-fields are probably the least standardized part of the ANSI C specification. The compiler can choose how bits are allocated within the bit-field container. For this reason alone, avoid using bit-fields inside a union or in an API structure definition. Different compilers can assign the same bit-field different bit positions in the container.
It is also a good idea to avoid bit-fields for efficiency. Bit-fields are structure elements and usually accessed using structure pointers; consequently, they suffer from the pointer aliasing problems described in Section 5.6. Every bit-field access is really a memory access. Possible pointer aliasing often forces the compiler to reload the bit-field several times.
The following example, dostages_v1, illustrates this problem. It also shows that compilers do not tend to optimize bit-field testing very well.
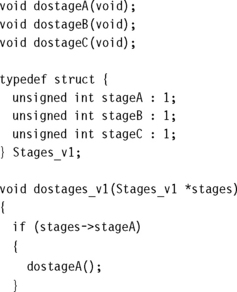

Here, we use three bit-field flags to enable three possible stages of processing. The example compiles to
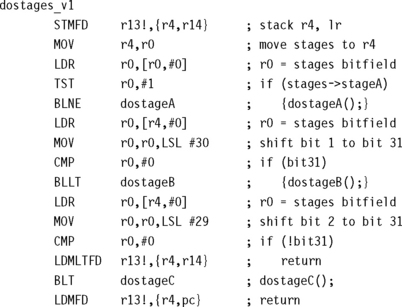
Note that the compiler accesses the memory location containing the bit-field three times. Because the bit-field is stored in memory, the dostage functions could change the value. Also, the compiler uses two instructions to test bit 1 and bit 2 of the bit-field, rather than a single instruction.
You can generate far more efficient code by using an integer rather than a bit-field. Use enum or #define masks to divide the integer type into different fields.
EXAMPLE 5.9
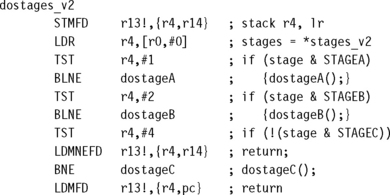
The following code implements the dostages function using logical operations rather than bit-fields:
![]()
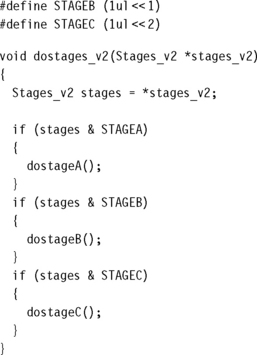
Now that a single unsigned long type contains all the bit-fields, we can keep a copy of their values in a single local variable stages, which removes the memory aliasing problem discussed in Section 5.6. In other words, the compiler must assume that the dostageX (where X is A, B, or C) functions could change the value of *stages_v2.
The compiler generates the following code giving a saving of 33% over the previous version using ANSI bit-fields:
You can also use the masks to set and clear the bit-fields, just as easily as for testing them. The following code shows how to set, clear, or toggle bits using the STAGE masks:
![]()
![]()
These bit set, clear, and toggle operations take only one ARM instruction each, using ORR, BIC, and EOR instructions, respectively. Another advantage is that you can now manipulate several bit-fields at the same time, using one instruction. For example:
![]()
5.9 UNALIGNED DATA AND ENDIANNESS
Unaligned data and endianness are two issues that can complicate memory accesses and portability. Is the array pointer aligned? Is the ARM configured for a big-endian or little-endian memory system?
The ARM load and store instructions assume that the address is a multiple of the type you are loading or storing. If you load or store to an address that is not aligned to its type, then the behavior depends on the particular implementation. The core may generate a data abort or load a rotated value. For well-written, portable code you should avoid unaligned accesses.
C compilers assume that a pointer is aligned unless you say otherwise. If a pointer isn’t aligned, then the program may give unexpected results. This is sometimes an issue when you are porting code to the ARM from processors that do allow unaligned accesses. For armcc, the __packed directive tells the compiler that a data item can be positioned at any byte alignment. This is useful for porting code, but using __packed will impact performance.
To illustrate this, look at the following simple routine, readint. It returns the integer at the address pointed to by data. We’ve used __packed to tell the compiler that the integer may possibly not be aligned.


Notice how large and complex the code is. The compiler emulates the unaligned access using two aligned accesses and data processing operations, which is very costly and shows why you should avoid _packed. Instead use the type char * to point to data that can appear at any alignment. We will look at more efficient ways to read 32-bit words from a char * later.
You are likely to meet alignment problems when reading data packets or files used to transfer information between computers. Network packets and compressed image files are good examples. Two- or four-byte integers may appear at arbitrary offsets in these files. Data has been squeezed as much as possible, to the detriment of alignment.
Endianness (or byte order) is also a big issue when reading data packets or compressed files. The ARM core can be configured to work in little-endian (least significant byte at lowest address) or big-endian (most significant byte at lowest address) modes. Little-endian mode is usually the default.
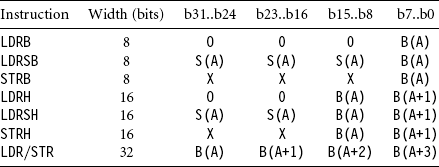
The endianness of an ARM is usually set at power-up and remains fixed thereafter. Tables 5.6 and 5.7 illustrate how the ARM’s 8-bit, 16-bit, and 32-bit load and store instructions work for different endian configurations. We assume that byte address A is aligned to the size of the memory transfer. The tables show how the byte addresses in memory map into the 32-bit register that the instruction loads or stores.

Table 5.7
What is the best way to deal with endian and alignment problems? If speed is not critical, then use functions like readint_little and readint_big in Example 5.10, which read a four-byte integer from a possibly unaligned address in memory. The address alignment is not known at compile time, only at run time. If you’ve loaded a file containing big-endian data such as a JPEG image, then use readint_big. For a bytestream containing little-endian data, use readint_little. Both routines will work correctly regardless of the memory endianness ARM is configured for.
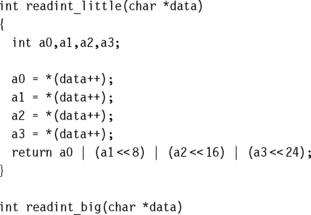
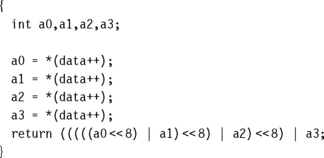
EXAMPLE 5.10
These functions read a 32-bit integer from a bytestream pointed to by data. The bytestream contains little- or big-endian data, respectively. These functions are independent of the ARM memory system byte order since they only use byte accesses.
If speed is critical, then the fastest approach is to write several variants of the critical routine. For each possible alignment and ARM endianness configuration, you call a separate routine optimized for that situation.
EXAMPLE 5.11
The read_samples routine takes an array of N 16-bit sound samples at address in. The sound samples are little-endian (for example from a.wav file) and can be at any byte alignment. The routine copies the samples to an aligned array of short type values pointed to by out. The samples will be stored according to the configured ARM memory endianness.
The routine handles all cases in an efficient manner, regardless of input alignment and of ARM endianness configuration.

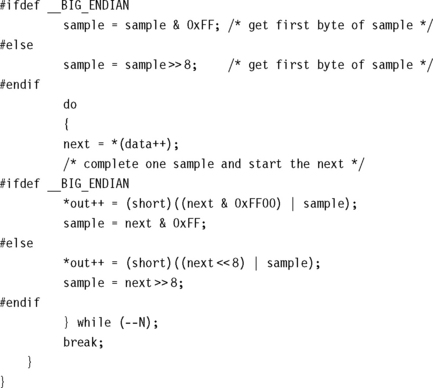
The routine works by having different code for each endianness and alignment. Endianness is dealt with at compile time using the __BIG_ENDIAN compiler flag. Alignment must be dealt with at run time using the switch statement.
You can make the routine even more efficient by using 32-bit reads and writes rather than 16-bit reads and writes, which leads to four elements in the switch statement, one for each possible address alignment modulo four.
SUMMARY: Endianness and Alignment
![]() Avoid using unaligned data if you can.
Avoid using unaligned data if you can.
![]() Use the type char * for data that can be at any byte alignment. Access the data by reading bytes and combining with logical operations. Then the code won’t depend on alignment or ARM endianness configuration.
Use the type char * for data that can be at any byte alignment. Access the data by reading bytes and combining with logical operations. Then the code won’t depend on alignment or ARM endianness configuration.
![]() For fast access to unaligned structures, write different variants according to pointer alignment and processor endianness.
For fast access to unaligned structures, write different variants according to pointer alignment and processor endianness.
5.10 DIVISION
The ARM does not have a divide instruction in hardware. Instead the compiler implements divisions by calling software routines in the C library. There are many different types of division routine that you can tailor to a specific range of numerator and denominator values. We look at assembly division routines in detail in Chapter 7. The standard integer division routine provided in the C library can take between 20 and 100 cycles, depending on implementation, early termination, and the ranges of the input operands.
Division and modulus (/ and %) are such slow operations that you should avoid them as much as possible. However, division by a constant and repeated division by the same denominator can be handled efficiently. This section describes how to replace certain divisions by multiplications and how to minimize the number of division calls.
Circular buffers are one area where programmers often use division, but you can avoid these divisions completely. Suppose you have a circular buffer of size buffer_size bytes and a position indicated by a buffer offset. To advance the offset by increment bytes you could write
![]()
Instead it is far more efficient to write
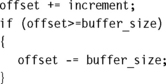
The first version may take 50 cycles; the second will take 3 cycles because it does not involve a division. We’ve assumed that increment < buffer_size; you can always arrange this in practice.
If you can’t avoid a division, then try to arrange that the numerator and denominator are unsigned integers. Signed division routines are slower since they take the absolute values of the numerator and denominator and then call the unsigned division routine. They fix the sign of the result afterwards.
Many C library division routines return the quotient and remainder from the division. In other words a free remainder operation is available to you with each division operation and vice versa. For example, to find the (x, y) position of a location at offset bytes into a screen buffer, it is tempting to write
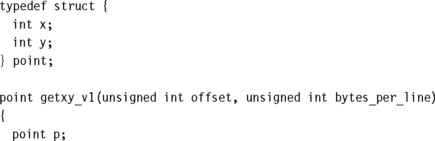

It appears that we have saved a division by using a subtract and multiply to calculate p.x, but in fact, it is often more efficient to write the function with the modulus or remainder operation.
EXAMPLE 5.12
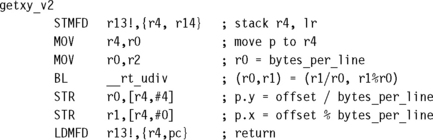
In getxy_v2, the quotient and remainder operation only require a single call to a division routine:

There is only one division call here, as you can see in the following compiler output. In fact, this version is four instructions shorter than getxy_v1. Note that this may not be the case for all compilers and C libraries.
5.10.1 REPEATED UNSIGNED DIVISION WITH REMAINDER
Often the same denominator occurs several times in code. In the previous example, bytes_per_line will probably be fixed throughout the program. If we project from three to two cartesian coordinates, then we use the denominator twice:
In these situations it is more efficient to cache the value of 1/z in some way and use a multiplication by 1/z instead of a division. We will show how to do this in the next subsection. We also want to stick to integer arithmetic and avoid floating point (see Section 5.11).
The next description is rather mathematical and covers the theory behind this conversion of repeated divisions into multiplications. If you are not interested in the theory, then don’t worry. You can jump directly to Example 5.13, which follows.
5.10.2 CONVERTING DIVIDES INTO MULTIPLIES
We’ll use the following notation to distinguish exact mathematical divides from integer divides:
![]() n/d = the integer part of n divided by d, rounding towards zero (as in C)
n/d = the integer part of n divided by d, rounding towards zero (as in C)
The obvious way to estimate d−1, while sticking to integer arithmetic, is to calculate 232/d. Then we can estimate n/d
We need to perform the multiplication by n to 64-bit accuracy. There are a couple of problems with this approach:
![]() To calculate 232/d, the compiler needs to use 64-bit long long type arithmetic because 232 does not fit into an unsigned int type. We must specify the division as (1ull
To calculate 232/d, the compiler needs to use 64-bit long long type arithmetic because 232 does not fit into an unsigned int type. We must specify the division as (1ull ![]() 32)/d. This 64-bit division is much slower than the 32-bit division we wanted to perform originally!
32)/d. This 64-bit division is much slower than the 32-bit division we wanted to perform originally!
![]() If d happens to be 1, then 232/d will not fit into an unsigned int type.
If d happens to be 1, then 232/d will not fit into an unsigned int type.
It turns out that a slightly cruder estimate works well and fixes both these problems. Instead of 232/d, we look at (232 – 1)/d. Let
![]()
We can calculate s using a single unsigned int type division. We know that
Next, calculate an estimate q to n/d:
![]()
Mathematically, the shift right by 32 introduces an error e2:
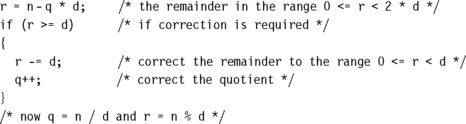
So, q is an underestimate to n/d. Now
So q = n/d or q = (n/d) – 1. We can find out which quite easily, by calculating the remainder r = n – qd, which must be in the range 0 ≤ r < 2d. The following code corrects the result:
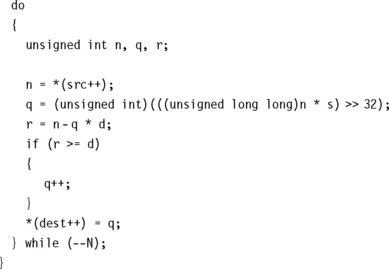
EXAMPLE 5.13
The following routine, scale, shows how to convert divisions to multiplications in practice. It divides an array of N elements by denominator d. We first calculate the value of s as above. Then we replace each divide by d with a multiplication by s. The 64-bit multiply is cheap because the ARM has an instruction UMULL, which multiplies two 32-bit values, giving a 64-bit result.
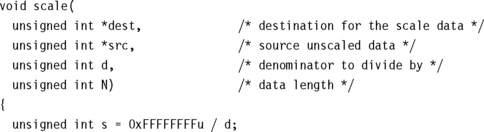
Here we have assumed that the numerator and denominator are 32-bit unsigned integers. Of course, the algorithm works equally well for 16-bit unsigned integers using a 32-bit multiply, or for 64-bit integers using a 128-bit multiply. You should choose the narrowest width for your data. If your data is 16-bit, then set s = (216 – 1)/d and estimate q using a standard integer C multiply.
5.10.3 UNSIGNED DIVISION BY A CONSTANT
To divide by a constant c, you could use the algorithm of Example 5.13, precalculating s = (232 – 1)/c. However, there is an even more efficient method. The ADS1.2 compiler uses this method to synthesize divisions by a constant.
The idea is to use an approximation to d−1 that is sufficiently accurate so that multiplying by the approximation gives the exact value of n/d. We use the following mathematical results:1.
Since n = (n/d)d + r for 0 ≤ r ≤ d – 1, the results follow from the equations
For both equations the right-hand side is in the range 0 ≤ x < 2N+k. For a 32-bit unsigned integer n, we take N = 32, choose k such that 2k <d ≤ 2k+1, and set s = (2N+k + 2k)/d. If ds ≥ 2N+k, then n/d = (ns) ![]() (N + k); otherwise, n/d = (ns + s)
(N + k); otherwise, n/d = (ns + s) ![]() (N + k). As an extra optimization, if d is a power of two, we can replace the division with a shift.
(N + k). As an extra optimization, if d is a power of two, we can replace the division with a shift.
EXAMPLE 5.14
The udiv_by_const function tests the algorithm described above. In practice d will be a fixed constant rather than a variable. You can precalculate s and k in advance and only include the calculations relevant for your particular value of d.


If you know that 0 ≤ n < 231, as for a positive signed integer, then you don’t need to bother with the different cases. You can increase k by one without having to worry about s overflowing. Take N = 31, choose k such that 2k−1 < d ≤ 2k, and set s = (sN + k + 2k – 1)/d. Then n/d = (ns) ![]() (N + k).
(N + k).
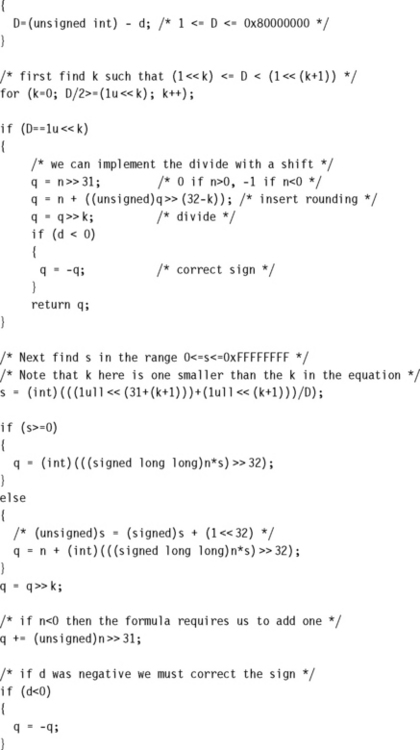
5.10.4 SIGNED DIVISION BY A CONSTANT
We can use ideas and algorithms similar to those in Section 5.10.3 to handle signed constants as well. If d < 0, then we can divide by |d| and correct the sign later, so for now we assume that d > 0. The first mathematical result of Section 5.10.3 extends to signed n. If d > 0 and 2N+k < ds ≤ 2N+k + 2k, then
For 32-bit signed n, we take N = 31 and choose k ≤ 31 such that 2k−1 < d ≤ 2k. This ensures that we can find a 32-bit unsigned s = (2N+k + 2k)/d satisfying the preceding relations. We need to take special care multiplying the 32-bit signed n with the 32-bit unsigned s. We achieve this using a signed long long type multiply with a correction if the top bit of s is set.
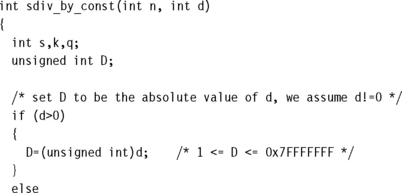
EXAMPLE 5.15
The following routine, sdiv_by_const, shows how to divide by a signed constant d. In practice you will precalculate k and s at compile time. Only the operations involving n for your particular value of d need be executed at run time.
![]()
Section 7.3 shows how to implement divides efficiently in assembler.
![]() Avoid divisions as much as possible. Do not use them for circular buffer handling.
Avoid divisions as much as possible. Do not use them for circular buffer handling.
![]() If you can’t avoid a division, then try to take advantage of the fact that divide routines often generate the quotient n/d and modulus n%d together.
If you can’t avoid a division, then try to take advantage of the fact that divide routines often generate the quotient n/d and modulus n%d together.
![]() To repeatedly divide by the same denominator d, calculate s = (2k – 1)/d in advance. You can replace the divide of a k-bit unsigned integer by d with a 2k-bit multiply by s.
To repeatedly divide by the same denominator d, calculate s = (2k – 1)/d in advance. You can replace the divide of a k-bit unsigned integer by d with a 2k-bit multiply by s.
![]() To divide unsigned n < 2N by an unsigned constant d, you can find a 32-bit unsigned s and shift k such that n/d is either (ns)
To divide unsigned n < 2N by an unsigned constant d, you can find a 32-bit unsigned s and shift k such that n/d is either (ns) ![]() (N + k) or (ns + s)
(N + k) or (ns + s) ![]() (N + k). The choice depends only on d. There is a similar result for signed divisions.
(N + k). The choice depends only on d. There is a similar result for signed divisions.
5.11 FLOATING POINT
The majority of ARM processor implementations do not provide hardware floating-point support, which saves on power and area when using ARM in a price-sensitive, embedded application. With the exceptions of the Floating Point Accelerator (FPA) used on the ARM7500FE and the Vector Floating Point accelerator (VFP) hardware, the C compiler must provide support for floating point in software.
In practice, this means that the C compiler converts every floating-point operation into a subroutine call. The C library contains subroutines to simulate floating-point behavior using integer arithmetic. This code is written in highly optimized assembly. Even so, floating-point algorithms will execute far more slowly than corresponding integer algorithms.
If you need fast execution and fractional values, you should use fixed-point or block-floating algorithms. Fractional values are most often used when processing digital signals such as audio and video. This is a large and important area of programming, so we have dedicated a whole chapter, Chapter 8, to the area of digital signal processing on the ARM. For best performance you need to code the algorithms in assembly (see the examples of Chapter 8).
5.12 INLINE FUNCTIONS AND INLINE ASSEMBLY
Section 5.5 looked at how to call functions efficiently. You can remove the function call overhead completely by inlining functions. Additionally many compilers allow you to include inline assembly in your C source code. Using inline functions that contain assembly you can get the compiler to support ARM instructions and optimizations that aren’t usually available. For the examples of this section we will use the inline assembler in armcc.
Don’t confuse the inline assembler with the main assembler armasm or gas. The inline assembler is part of the C compiler. The C compiler still performs register allocation, function entry, and exit. The compiler also attempts to optimize the inline assembly you write, or deoptimize it for debug mode. Although the compiler output will be functionally equivalent to your inline assembly, it may not be identical.
The main benefit of inline functions and inline assembly is to make accessible in C operations that are not usually available as part of the C language. It is better to use inline functions rather than #define macros because the latter doesn’t check the types of the function arguments and return value.
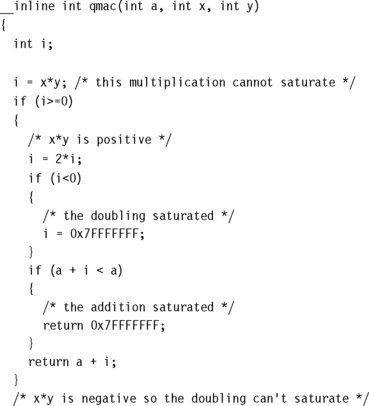
Let s consider as an example the saturating multiply double accumulate primitive used by many speech processing algorithms. This operation calculates a + 2xy for 16-bit signed operands x and y and 32-bit accumulator a. Additionally, all operations saturate to the nearest possible value if they exceed a 32-bit range. We say x and y are Q15 fixed-point integers because they represent the values x2−15 and y2−15, respectively. Similarly, a is a Q31 fixed-point integer because it represents the value a2−31.
We can define this new operation using an inline function qmac:

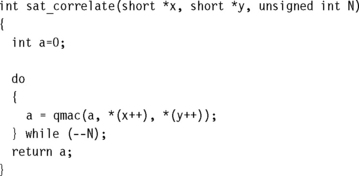
We can now use this new operation to calculate a saturating correlation. In other words, we calculate a = 2x0y0 +…2xN−1yN−1 with saturation.
The compiler replaces each qmac function call with inline code. In other words it inserts the code for qmac instead of calling qmac. Our C implementation of qmac isn’t very efficient, requiring several if statements. We can write it much more efficiently using assembly. The inline assembler in the C compiler allows us to use assembly in our inline C function.
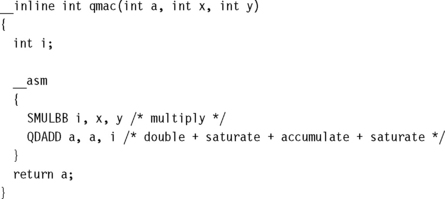
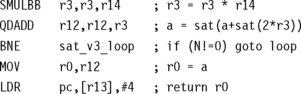
EXAMPLE 5.16
This example shows an efficient implementation of qmac using inline assembly. The example supports both armcc and gcc inline assembly formats, which are quite different. In the gcc format the “cc” informs the compiler that the instruction reads or writes the condition code flags. See the armcc or gcc manuals for further information.


This inlined code reduces the main loop of sat_correlate from 19 instructions to 9 instructions.
EXAMPLE 5.17
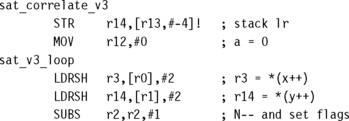
Now suppose that we are using an ARM9E processor with the ARMv5E extensions. We can rewrite qmac again so that the compiler uses the new ARMv5E instructions:
This time the main loop compiles to just six instructions:
Other instructions that are not usually available from C include coprocessor instructions. Example 5.18 shows how to access these.
5.13 PORTABILITY ISSUES
Here is a summary of the issues you may encounter when porting C code to the ARM.
![]() The char type. On the ARM, char is unsigned rather than signed as for many other processors. A common problem concerns loops that use a char loop counter i and the continuation condition i ≥ 0, they become infinite loops. In this situation, armcc produces a warning of unsigned comparison with zero. You should either use a compiler option to make char signed or change loop counters to type int.
The char type. On the ARM, char is unsigned rather than signed as for many other processors. A common problem concerns loops that use a char loop counter i and the continuation condition i ≥ 0, they become infinite loops. In this situation, armcc produces a warning of unsigned comparison with zero. You should either use a compiler option to make char signed or change loop counters to type int.
![]() The int type. Some older architectures use a 16-bit int, which may cause problems when moving to ARM’s 32-bit int type although this is rare nowadays. Note that expressions are promoted to an int type before evaluation. Therefore if i = -0x1000, the expression i == 0xF000 is true on a 16-bit machine but false on a 32- bit machine.
The int type. Some older architectures use a 16-bit int, which may cause problems when moving to ARM’s 32-bit int type although this is rare nowadays. Note that expressions are promoted to an int type before evaluation. Therefore if i = -0x1000, the expression i == 0xF000 is true on a 16-bit machine but false on a 32- bit machine.
![]() Unaligned data pointers. Some processors support the loading of short and int typed values from unaligned addresses. A C program may manipulate pointers directly so that they become unaligned, for example, by casting a char * to an int *. ARM architectures up to ARMv5TE do not support unaligned pointers. To detect them, run the program on an ARM with an alignment checking trap. For example, you can configure the ARM720T to data abort on an unaligned access.
Unaligned data pointers. Some processors support the loading of short and int typed values from unaligned addresses. A C program may manipulate pointers directly so that they become unaligned, for example, by casting a char * to an int *. ARM architectures up to ARMv5TE do not support unaligned pointers. To detect them, run the program on an ARM with an alignment checking trap. For example, you can configure the ARM720T to data abort on an unaligned access.
![]() Endian assumptions. C code may make assumptions about the endianness of a memory system, for example, by casting a char * to an int *. If you configure the ARM for the same endianness the code is expecting, then there is no issue. Otherwise, you must remove endian-dependent code sequences and replace them by endian-independent ones. See Section 5.9 for more details.
Endian assumptions. C code may make assumptions about the endianness of a memory system, for example, by casting a char * to an int *. If you configure the ARM for the same endianness the code is expecting, then there is no issue. Otherwise, you must remove endian-dependent code sequences and replace them by endian-independent ones. See Section 5.9 for more details.
![]() Function prototyping. The armcc compiler passes arguments narrow, that is, reduced to the range of the argument type. If functions are not prototyped correctly, then the function may return the wrong answer. Other compilers that pass arguments wide may give the correct answer even if the function prototype is incorrect. Always use ANSI prototypes.
Function prototyping. The armcc compiler passes arguments narrow, that is, reduced to the range of the argument type. If functions are not prototyped correctly, then the function may return the wrong answer. Other compilers that pass arguments wide may give the correct answer even if the function prototype is incorrect. Always use ANSI prototypes.
![]() Use of bit-fields. The layout of bits within a bit-field is implementation and endian dependent. If C code assumes that bits are laid out in a certain order, then the code is not portable.
Use of bit-fields. The layout of bits within a bit-field is implementation and endian dependent. If C code assumes that bits are laid out in a certain order, then the code is not portable.
![]() Use of enumerations. Although enum is portable, different compilers allocate different numbers of bytes to an enum. The gcc compiler will always allocate four bytes to an enum type. The armcc compiler will only allocate one byte if the enum takes only eight-bit values. Therefore you can’t cross-link code and libraries between different compilers if you use enums in an API structure.
Use of enumerations. Although enum is portable, different compilers allocate different numbers of bytes to an enum. The gcc compiler will always allocate four bytes to an enum type. The armcc compiler will only allocate one byte if the enum takes only eight-bit values. Therefore you can’t cross-link code and libraries between different compilers if you use enums in an API structure.
![]() Inline assembly. Using inline assembly in C code reduces portability between architectures. You should separate any inline assembly into small inlined functions that can easily be replaced. It is also useful to supply reference, plain C implementations of these functions that can be used on other architectures, where this is possible.
Inline assembly. Using inline assembly in C code reduces portability between architectures. You should separate any inline assembly into small inlined functions that can easily be replaced. It is also useful to supply reference, plain C implementations of these functions that can be used on other architectures, where this is possible.
![]() The volatile keyword. Use the volatile keyword on the type definitions of ARM memory-mapped peripheral locations. This keyword prevents the compiler from optimizing away the memory access. It also ensures that the compiler generates a data access of the correct type. For example, if you define a memory location as a volatile short type, then the compiler will access it using 16-bit load and store instructions LDRSH and STRH.
The volatile keyword. Use the volatile keyword on the type definitions of ARM memory-mapped peripheral locations. This keyword prevents the compiler from optimizing away the memory access. It also ensures that the compiler generates a data access of the correct type. For example, if you define a memory location as a volatile short type, then the compiler will access it using 16-bit load and store instructions LDRSH and STRH.
5.14 SUMMARY
By writing C routines in a certain style, you can help the C compiler to generate faster ARM code. Performance-critical applications often contain a few routines that dominate the performance profile; concentrate on rewriting these routines using the guidelines of this chapter.
Here are the key performance points we covered:
![]() Use the signed and unsigned int types for local variables, function arguments, and return values. This avoids casts and uses the ARM’s native 32-bit data processing instructions efficiently.
Use the signed and unsigned int types for local variables, function arguments, and return values. This avoids casts and uses the ARM’s native 32-bit data processing instructions efficiently.
![]() The most efficient form of loop is a do-while loop that counts down to zero.
The most efficient form of loop is a do-while loop that counts down to zero.
![]() Unroll important loops to reduce the loop overhead.
Unroll important loops to reduce the loop overhead.
![]() Do not rely on the compiler to optimize away repeated memory accesses. Pointer aliasing often prevents this.
Do not rely on the compiler to optimize away repeated memory accesses. Pointer aliasing often prevents this.
![]() Try to limit functions to four arguments. Functions are faster to call if their arguments are held in registers.
Try to limit functions to four arguments. Functions are faster to call if their arguments are held in registers.
![]() Lay structures out in increasing order of element size, especially when compiling for Thumb.
Lay structures out in increasing order of element size, especially when compiling for Thumb.
![]() Don’t use bit-fields. Use masks and logical operations instead.
Don’t use bit-fields. Use masks and logical operations instead.
![]() Avoid divisions. Use multiplications by reciprocals instead.
Avoid divisions. Use multiplications by reciprocals instead.
![]() Avoid unaligned data. Use the char * pointer type if the data could be unaligned.
Avoid unaligned data. Use the char * pointer type if the data could be unaligned.
![]() Use the inline assembler in the C compiler to access instructions or optimizations that the C compiler does not support.
Use the inline assembler in the C compiler to access instructions or optimizations that the C compiler does not support.
1.For the first result see a paper by Torbjorn Granlund and Peter L. Montgomery, “Division by Invariant Integers Using Multiplication,” in proceedings of the SIG-PLAN PLDI’94 Conference, June 1994.