

69
CHAPTER 5
Topic AK-5
5.1 DIFFERENTIAL EQUATIONS OF MOTION OF A RIGID BODY:
ROTATIONAL MOTION OF A RIGID BODY
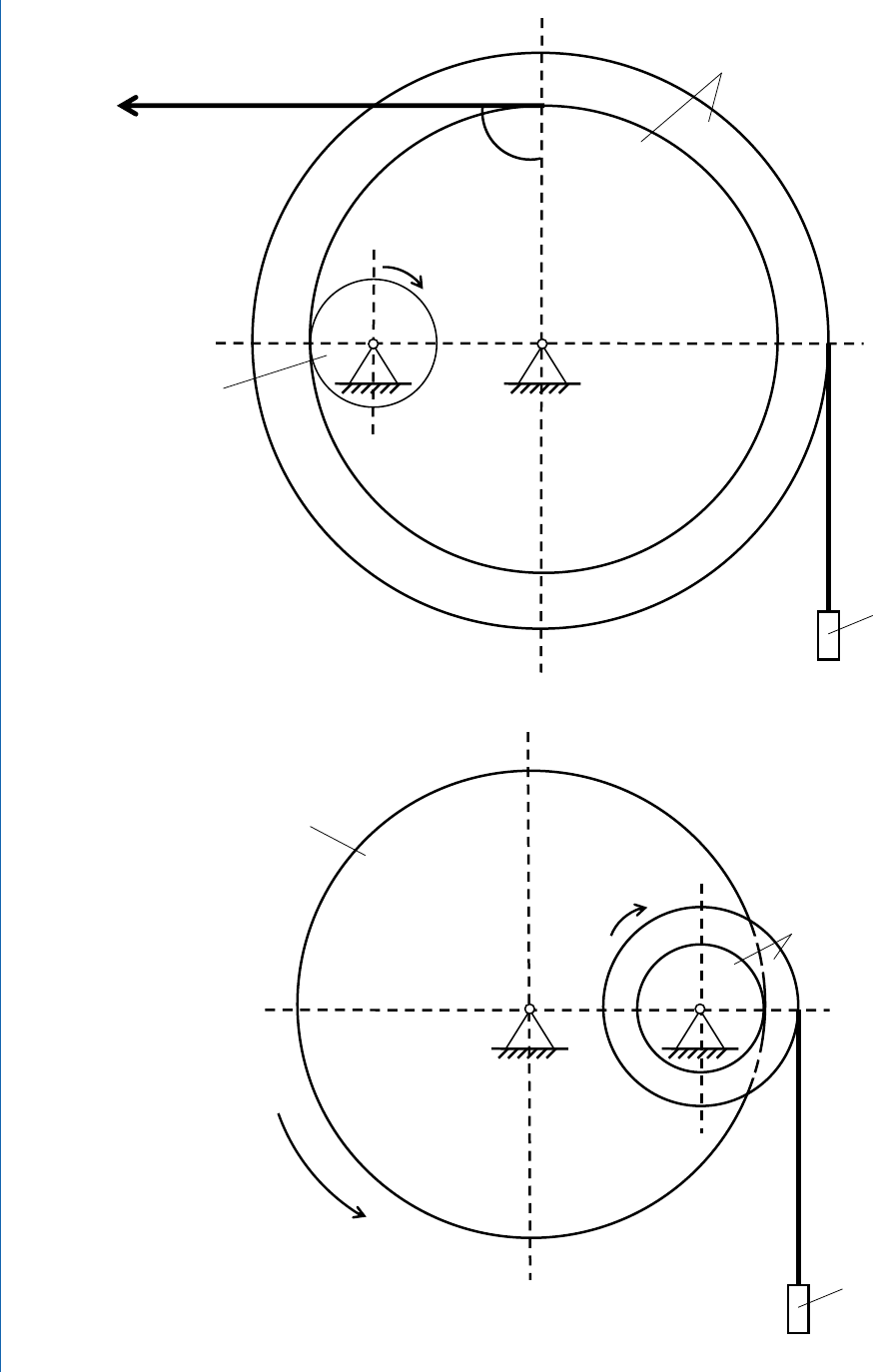
At some time instant (t = 0) the force couple with the moment M (driving moment) or driving force P are applied
to the link 1 of the given mechanism with angular velocity ω
10
. e mechanisms are schematically shown in Table
5.1. e required information is given. Determine the equation of the rotational motion of the link of the mechanism
shown on the last column of the Table 5.1. Also determine the tension in the ropes at the given time instant. In the
problems where the links 1 and 2 are in touch, determine the circular force at the contact point. e links 1 and 2
must be considered as homogeneous and solid if their radii of inertia i
x
1
and i
x
2
are not given.
Nomenclature:
m
1
, m
2
, m
3
– are masses of the links 1 and 2, and the lifted load 3, respectively;
M
C
– moment of the resistance forces applied to the driven link 2; and
R
1
, r
1
, R
2
, r
2
– the radii of large and small circles of the links 1 and 2, respectively.
M
2
1
Mc
3
Figure 5.1.
70 5. TOPIC AK-5
Mc
P
3
2
1
90°
Figure 5.2.
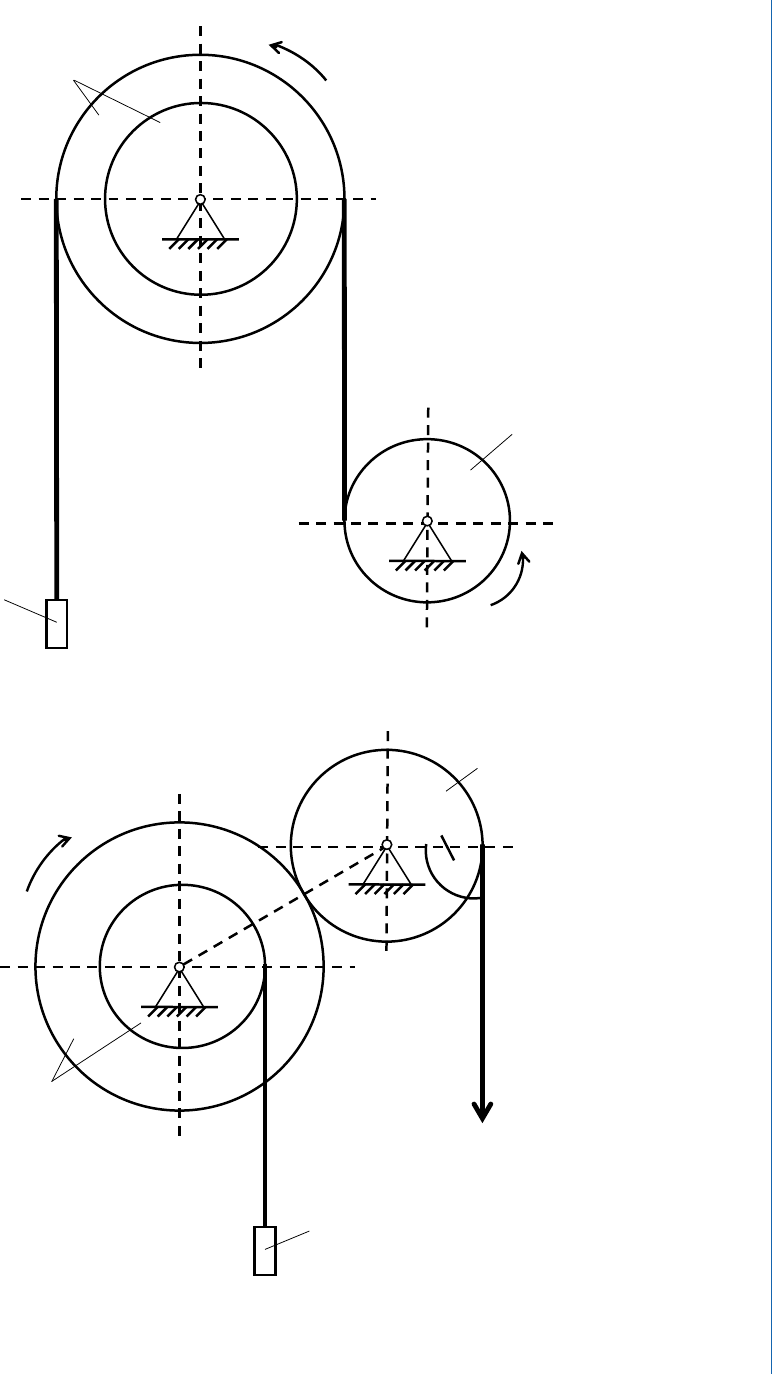
Mc
1
3
2
M
Figure 5.3.
71
3
Mc
2
1
M
Figure 5.4.
Mc
2
1
P
3
90°
Figure 5.5.
5.1 DIFFERENTIAL EQUATIONS OF MOTION OF RIGID BODY
72 5. TOPIC AK-5
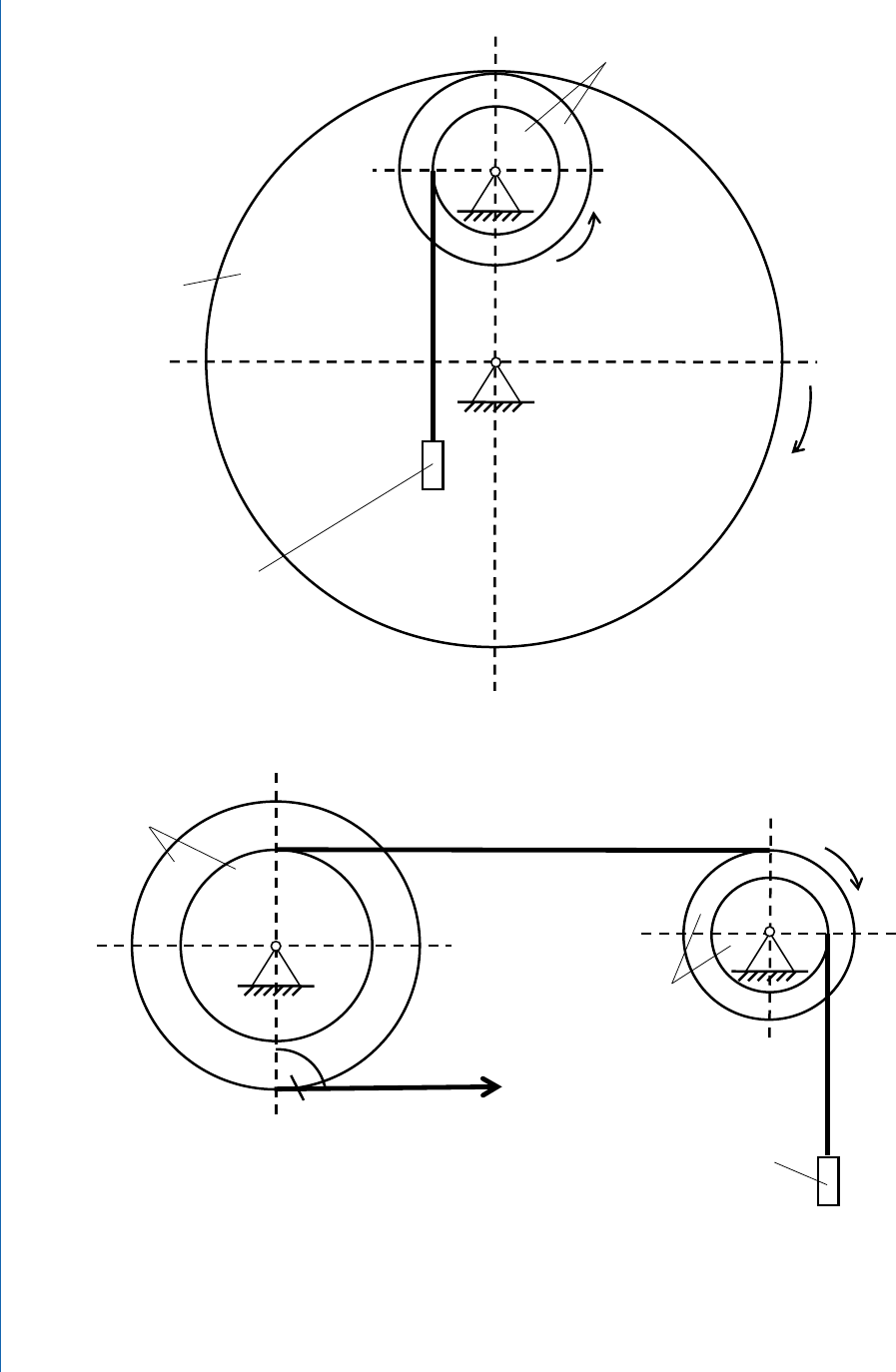
Mc
3
1
2
M
Figure 5.6.
3
Mc
1
2
P
90°
Figure 5.7.

73
Mc
1
2
P
3
90°
Figure 5.8.
Mc
2
1
3
M
Figure 5.9.
5.1 DIFFERENTIAL EQUATIONS OF MOTION OF RIGID BODY
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.