Home Page Icon
Home Page
Table of Contents for
APPENDIX 1. Sign Conventions for Force and Moment and Wheel Slip
Close
APPENDIX 1. Sign Conventions for Force and Moment and Wheel Slip
by Hans Pacejka
Tire and Vehicle Dynamics, 3rd Edition
Cover Image
Contents
Title
Copyright
Exercises
Preface
Chapter 1. Tire Characteristics and Vehicle Handling and Stability
1.1 Introduction
1.2 Tire and Axle Characteristics
1.3 Vehicle Handling and Stability
Chapter 2. Basic Tire Modeling Considerations
2.1 Introduction
2.2 Definition of Tire Input Quantities
2.3 Assessment of Tire Input Motion Components
2.4 Fundamental Differential Equations for a Rolling and Slipping Body
2.5 Tire Models (Introductory Discussion)
Chapter 3. Theory of Steady-State Slip Force and Moment Generation
3.1 Introduction
3.2 Tire Brush Model
3.3 The Tread Simulation Model
3.4 Application: Vehicle Stability at Braking up to Wheel Lock
Chapter 4. Semi-Empirical Tire Models
4.1 Introduction
4.2 The Similarity Method
4.3 The Magic Formula Tire Model
Chapter 5. Non-Steady-State Out-of-Plane String-Based Tire Models
5.1 Introduction
5.2 Review of Earlier Research
5.3 The Stretched String Model
5.4 Approximations and Other Models
5.5 Tire Inertia Effects
5.6 Side Force Response to Time-Varying Load
Chapter 6. Theory of the Wheel Shimmy Phenomenon
6.1 Introduction
6.2 The Simple Trailing Wheel System with Yaw Degree of Freedom
6.3 Systems with Yaw and Lateral Degrees of Freedom
6.4 Shimmy and Energy Flow
6.5 Nonlinear Shimmy Oscillations
Chapter 7. Single-Contact-Point Transient Tire Models
7.1 Introduction
7.2 Model Development
7.3 Enhanced Nonlinear Transient Tire Model
Chapter 8. Applications of Transient Tire Models
8.1 Vehicle Response to Steer Angle Variations
8.2 Cornering on Undulated Roads
8.3 Longitudinal Force Response to Tire Nonuniformity, Axle Motions, and Road Unevenness
8.4 Forced Steering Vibrations
8.5 ABS Braking on Undulated Road
8.6 Starting from Standstill
Chapter 9. Short Wavelength Intermediate Frequency Tire Model
9.1 Introduction
9.2 The Contact Patch Slip Model
9.3 Tire Dynamics
9.4 Dynamic Tire Model Performance
Chapter 10. Dynamic Tire Response to Short Road Unevennesses
10.1 Model Development
10.2 Swift on Road Unevennesses (Simulation and Experiment)
Chapter 11. Motorcycle Dynamics
11.1 Introduction
11.2 Model Description
11.3 Linear Equations of Motion
11.4 Stability Analysis and Step Responses
11.5 Analysis of Steady-State Cornering
11.6 The Magic Formula Tire Model
Chapter 12. Tire Steady-State and Dynamic Test Facilities
Chapter 13. Outlines of Three Advanced Dynamic Tire Models
Introduction
13.1 The RMOD-K Tire Model (Christian Oertel)
13.2 The FTire Tire Model (Michael Gipser)
13.3 The MF-Swift Tire Model (Igo Besselink)
References
List of Symbols
Subscripts and superscripts
APPENDIX 1. Sign Conventions for Force and Moment and Wheel Slip
APPENDIX 2. Online Information
APPENDIX 3. MF-Tire/MF-Swift Parameters and Estimation Methods
Index
Search in book...
Toggle Font Controls
Playlists
Add To
Create new playlist
Name your new playlist
Playlist description (optional)
Cancel
Create playlist
Sign In
Email address
Password
Forgot Password?
Create account
Login
or
Continue with Facebook
Continue with Google
Sign Up
Full Name
Email address
Confirm Email Address
Password
Login
Create account
or
Continue with Facebook
Continue with Google
Prev
Previous Chapter
List of Symbols
Next
Next Chapter
APPENDIX 2. Online Information
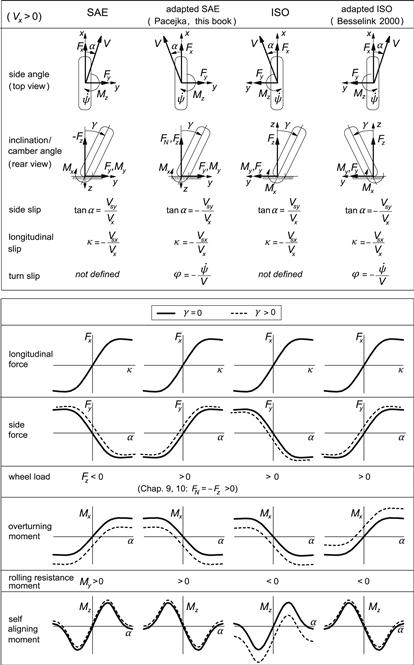
APPENDIX 1
Sign Conventions for Force and Moment and Wheel Slip
Add Highlight
No Comment
..................Content has been hidden....................
You can't read the all page of ebook, please click
here
login for view all page.
Day Mode
Cloud Mode
Night Mode
Reset