Robotic process automation with increasing productivity and improving product quality using artificial intelligence and machine learning
Anand Singh Rajawat1, Romil Rawat1, Kanishk Barhanpurkar2, Rabindra Nath Shaw3 and Ankush Ghosh4, 1Department of Computer Science Engineering, Shri Vaishnav Vidyapeeth Vishwavidyalaya, Indore, India, 2Department of Computer Science and Engineering, Sambhram Institute of Technology, Bengaluru, India, 3Department of Electrical, Electronics & Communication Engineering, Galgotias University, Greater Noida, India, 4School of Engineering and Applied Sciences, The Neotia University, Kolkata, India
Abstract
Robots are ideal replacements for trained staff in repeatable, general, and strategically significant roles, but they are not always practicable as replacements. In spite of growth and advancement in the automation industry, several sectors historically have been robot-reluctant, because they require large or unique quantities and nonserialized properties. The present chapter introduces a newer approach to advanced Productivity and Product Quality, integrating control and robotics’ repeatability with human versatility. The strategy suggested is focused on interactive and symbiotic partnerships between human staff and robots which give the historically manual, robot-reluctant industries a secure and dynamic solution. The proposed architecture contains components for the power, protection, and interface for the current production phase. The results demonstrate that machines, robots, and humans can occupy the field at the same time comfortably without physical separation, delivering advantageous symbiotic cooperation and dramatically reducing time, risk, and expense, with increased efficiency and product consistency over manual service.
Keywords
Robotic process automation; machine learning; deep learning; microprocessing
1.1 Introduction
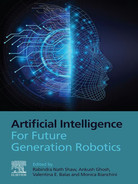
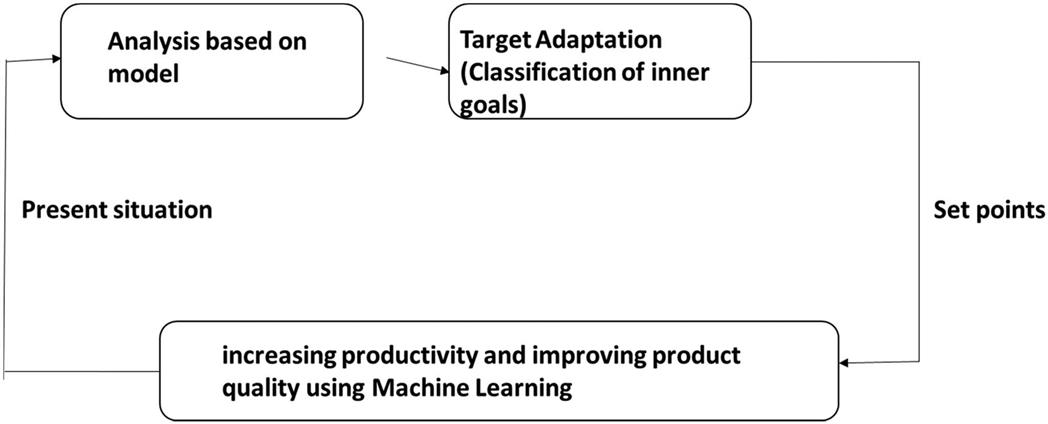
The growth in artificial intelligence (AI) and robotics has contributed to expanded speculation on artificial intellectuals and startups, more prominent journal coverage about how this technology is transforming the world, and a growing surge in empirical studies into the effect these developments have on businesses, staff, and economies [1]. They also have a substantial improvement in results. In this chapter, we define the main principles, review current literature, discuss repercussions for organizational design, and explain prospects for market analysts and strategy scientists. Much work in this field has been focused on how economic development and labor markets are impacted by robotic use and the implementation of AI technology. Despite the major consequences for social welfare, this is also an important area for future study. In addition, the lack of detailed evidence on the implementation and use of AI and robotics ensures that much of the current work is not observational but depends on expert or crowd-sourced views [2]. In the future, enhanced data collection and organization would facilitate more concrete scientific research and encourage researchers to explore adjacent issues like performance discrepancies and labor market impacts on various forms of robotics and technology for AI [3]. We need studies focused on data on how the effect of AI on growth, jobs, and compensation in businesses and on how artificial insight can influence economic results, such as creativity, dynamism, and inequalities, and distributional effects. Organizational analysts and policy scientists have many tools to help us consider how new developments impact our culture. We focus in particular on these issues as they are especially appropriate for operational and strategic scientists (Fig. 1.1).

The model should be capable of answering the following questions with respect to Robotic Process Automation (RPA):
- • What kinds of businesses will implement robotic technology and AI?
- • Do any management types or hierarchical structures exist that can be implemented very quickly?
- • Are the business conditions affecting the decision on adoption?
- • Is there a rise or a reduction in AI and robotics in professions, businesses, or regions?
- • Are any measures of management or control capable of reducing or exacerbating the adverse effects of robotics?
- • How does the implementation of AI and robotic technologies affect its producers, manufacturers upstream, and consumers in the same sector or market?
- • In which situations do potential competitors contend with traditional incumbents by using machine learning (ML) or robotics? [4]
- • How does the essence of work impact ML and robotics?
- • What is the relative value of skills and activities required for a work modified by AI and robotics?
- • How do ML and robots impact how human employees work on the job?
- • What operational words replace or supplement AI and robotics for work?
1.2 Related work
Chakraborty et al. [11] explained the most trending developments in AI which are rapidly changing the business processes. Trappey et al. [12] shows a unique intelligent patent system which provides a patent summary which will provide very necessary insights into a particular patent and help in business automation. RPA increases the overall efficiency of the business system. RPA systems are enabled with “bots” functionality, which will interact with software systems so that it will manage the human workload [3]. In the continuous process of the information systems domain, advancement in the field of Blockchain and Intelligent systems also plays an important role in development of RPA which will lead to improvement in product quality [13]. After the initial development, several steps have been taken to improve the RPA life cycle. A user-log system has been proposed which works on the knowledge of the back-office system and collects data in the form of periodic order of images and user-driven events. Additionally, RPA is used to increase productivity from the top to bottom levels of management (Table 1.1).
Table 1.1
| Study reference | Application | Type of technique used |
|---|---|---|
| Asatiani et al. [5] | Robotic automation | Machine learning |
| Langmann and Turi [6] | Business process management | Deep learning |
| Huang and Vasarhelyi [7] | Auditing | Machine learning |
| Qiu and Xiao [8] | Cost management optimization | Machine learning |
| Kokina and Blanchette [9] | Accounting | Deep learning |
| Cernat et al. [10] | UI test automation | Machine learning |
1.3 Proposed work
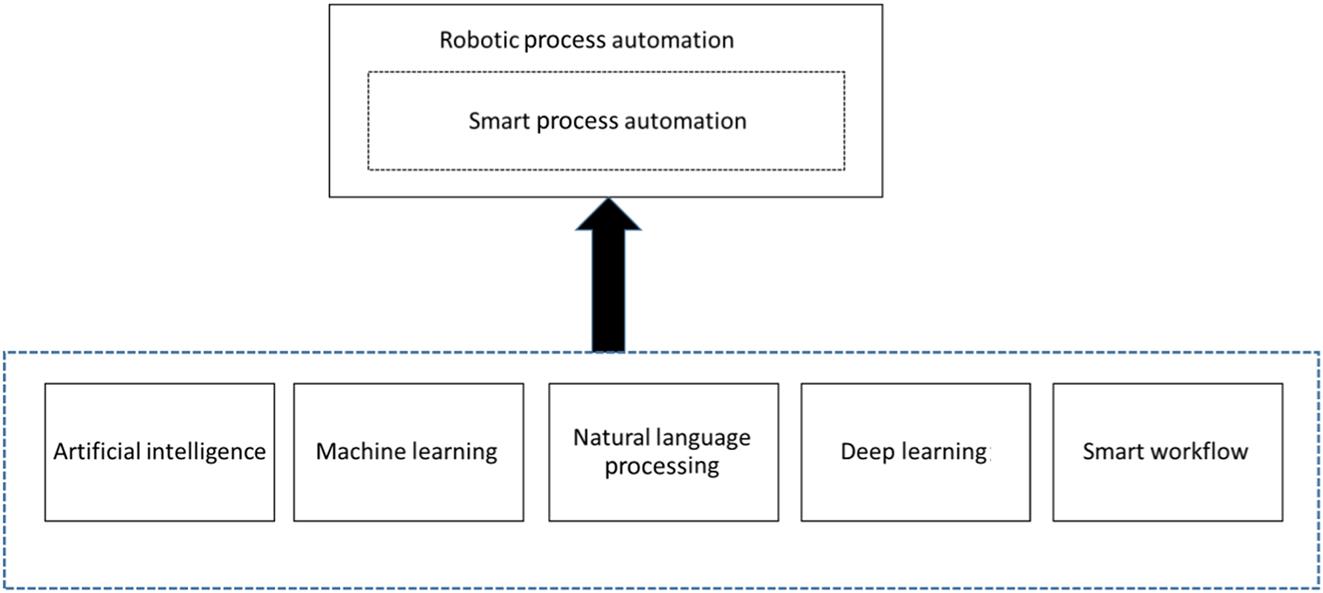
The robot systems are significantly growing in industrial automation and will increase in a growing range of situations, driven by a sustained need for expanded efficiency and better product quality [14]. Progress in depth and scope is rapidly expanding robotic systems for industrial automation. The relentless pursuit in robotic devices is usually for safer operating performance, accuracy, and reliability. To execute increasingly complicated tasks and navigate broader and diverse worlds, high intelligence and autonomy are important. This focused segment searches out state-of-the-art contributions to solve basic problems and realistic concerns in all areas of industrial automation robotic systems (William et al., 2019) (Fig. 1.2).
Industrial automation includes prototypes, preparation, and control [15]. Three sections are accepted: scheme planning and regulation, which seek to enhance robotic automation’s performance; precision; and solidity [16]. The architecture of the robot was often a big problem for improving robot performance. For particular tasks, a robot that communicates with objects and environments inevitably require motion planning and reliable power. The proposed system implements a complete movement design and control system for ensuring a dual arm movement (Fig. 1.3).
Yan et al. [18] suggested using a neural networks (NNs) algorithm for the optimization of algorithm prediction system parameters in a micropositioning system for the precise motion monitoring of a micropositioning system. In contrast with traditional approaches, our proposed approach, the Control Strategy, makes the precision motion monitoring of a micropositioning device clever and more flexible. By integrating visual interpretation, point cloud mechanism and awareness representation, findings indicate that the method suggested will achieve very strong output awareness of the environment. A moving target is most commonly seen in many programming situations, but for robotic manipulation, it is very difficult. Through fixing each other’s faults constantly, the combined trackers will decrease their faults. On checking frames in a required database of main goal is to monitor in different locations, experimental studies reveal that, although operating separately. Robots can achieve good adaptability for performing flexible tasks and have high interactivity with people during the learning process (Fig. 1.4).
This chapter describes the assembly strategy of exploration and transfers skills between the tasks. The chapter will describe environmental dynamics with Gaussian Method during policy training in a way that decreases sampling uncertainty and increases training performance. To enhance target value estimation and to produce virtual data for transformation studies, the trained dynamic model is used. Experimental studies suggest that the suggested system increases training performance by 31% and can be applied to new activities to accelerate preparation under new policies. Simulations indicate that the suggested approach has considerable efficacy. In such a complex, dynamic system, different manipulation tasks are successfully accomplished and even in a sparse incentive environment, sample performance is increased as the research time is considerably reduced. Learning the desired human direction or motion is a crucial yet common topic in the physical contact between person and robot. It is a tailored approach to maximize human use on mundane jobs, as opposed to the unpopular notion of the “reduction in workforce.” A project for process automation requires process modeling as a precondition since it serves as a plan for the project. The proposed model offers a comprehensive business process framework that allows the estimation of variables like efficiency, complexity, and full time equivalent savings from a specific process. Different criteria are taken into account, such as frequency of transition, diverse cognitive ability etc. [19]. We determine if it is appropriate for automation by using these variables and criteria. The proposed model is stronger than the standard model since it includes more parameters for individual parameters. The proposed model also analyzes the mechanism from almost every possible angle to give a more accurate detailed description, whereas the typical model’s analysis is incomplete and one dimensional. Our next tasks are refining the model by taking into account further dimensions and variables, such as cost estimates, paybacks, and advantages, increasing this model to serve further market patterns, and increasing the process model’s analytical base. AI-based solutions to problems relevant to robotic communication are as follows:
- • First we speak about how robots understand the world and take action using Internet of Things and ML to support the ecosystem.
- • More discussion will be offered on the way ML techniques are used in data collection and robotic partnerships that contribute to the development of robot communication.
- • We study the key strategies and approaches to the application of ML in robotic communication for effective and reliable task performance.
- • The future course of science and problems are eventually underlined.
1.4 Proposed model
A huge challenge for businesses is to understand how advantageous this reorganization is and how the modern technology notes the significance of weighing “depression” in actual expression that impairs the efficacy of face-to-face contact relative to virtual interaction. Likewise, new technology would possibly change the skills and tasks involved in many careers. New innovations alone would reform organizations and push businesses to take new developments into account. Boundaries between careers within businesses will possibly adjust as many activities are automated and people within organizations who want to utilize these technologies will definitely be more exposed to digital technologies [20]. In addition, the worker makeup will adjust to the latest and widely respected variety of skills. These improvements are often likely to be mirrored in the corporate architecture when they aim to achieve the highest benefit from their human resources. Interfirm limitations would also evolve with the increasingly common application of robotics and AI technology [21]. The robotics technologies will minimize costs dramatically within businesses, eventually resulting in fewer sales in the market [22]. Tasks which had been contracted to other entities either can be moved in-house, or corporations may find that other organizations with better access and capability to these technologies will execute more easily tasks that have previously been performed within an enterprise. Furthermore, if the technology is very unique to the organization and if the company faces the possibility of holding back an opportunistic downstream client a company may not implement emerging innovations, such as robotics. No matter how the result happens, the literature on strategy frequently shows that the current businesses cope with technical advances. Despite the obstacles faced by technological disruption, incumbents will prosper if they are “preadapted,” with the ability to exploit their traditional power and assets to benefit from the emerging technologies, thus demonstrating that it would be easier for businesses to be agile and respond to modern, “smarter” robotic technologies if robotic roll users were to be in-house and with access to technical expertise. If this result is generalizable, businesses can consider using individuals with technological expertise and extending their technical knowledge facility to make the most of the possible advantages of adoption.
1.4.1 System component
Traditionally, the aerospace engineering industry is manual and robotic. The assembling of parts and their various elements is one of the most routine activities. Intensive manual labor, jigs, and special equipment are needed for this phase.
1.4.2 Effective collaboration
In the existing production methods, implementing human–robot cooperation would cut costs primarily by reducing specific equipment and times. The problem of the criteria for allocating tasks between people and robots is critical in this collaborative process [23]. The robot executes repeated and precise activities to maximize its operating performance, while the human being provides versatility. The worker executes a manual process that is difficult to plan, while the robot completes the process where precision is required. In order to ensure the exactness and the human–robotic relationship for secure control device coordination the solution suggested requires additional components are as follows (Fig. 1.5):
- • Metrological sensors. For enhancing the precision of the robot, external sensors are used. The robot motions have high positioning discrepancies and poor direction replicability. The robot motions can be fixed to achieve more precision in positioning by incorporating a metrological device. A further argument is that the key component may be placed on the workbench with no detailed use of a metrological device.
- • Safety functionalities. The robot responds similarly to human behavior. Since no obstacles remain, protection functions need to be connected to the robot device. By supplying technological details, the robot assists the worker and the worker controls the robot through the touch screen regardless of his/her skill or ability. High-level contact would allow the robot to organize behaviors with nonexpert users.
1.5 Manufacturing systems
Enhanced quality standards are necessary for the sustained market performance of goods. The consequence of the absence of certain quality levels will result in output flow interruptions or goods that do not fulfill the customer’s requirements. For each commodity, consistency is described differently. In laser cutting, weight or surface ruggedness of the fabric are the characteristics of the fabricated part that determine the consistency. With regard to the entire phase of manufacturing, this consistency concept may be expanded to include considerations of production, for example, the usage of raw materials, the amount of time needed for production, or the workers necessary to finish the component. Manufacturing processes required to maximize certain collections of output factors are faced with the challenge of learning a great deal about the manufacturing process. Where existing systems are designed for the exact execution of setting criteria, the output consistency needs to be optimized by self-optimizing systems [25–27]. This can only be understood if there is embedded professional knowledge of the mechanism and boundary conditions which execute each step in the production chain. Examples include metal milling, cloth sewing, plate welding, injection modeling of plastic pieces, or laser radiation cutting of metal sheet. It is normal for them to process content to give it new capabilities. With every generation of machines and their control technologies, efficiency and reliability of those production systems improve. Suppliers rely on more durable materials, and where possible add faster actuators. Faster bus systems with sensor are implemented to improve circuit control and allow for quicker coordination with the unit (Figs. 1.6 and 1.7).
1.6 Results analysis
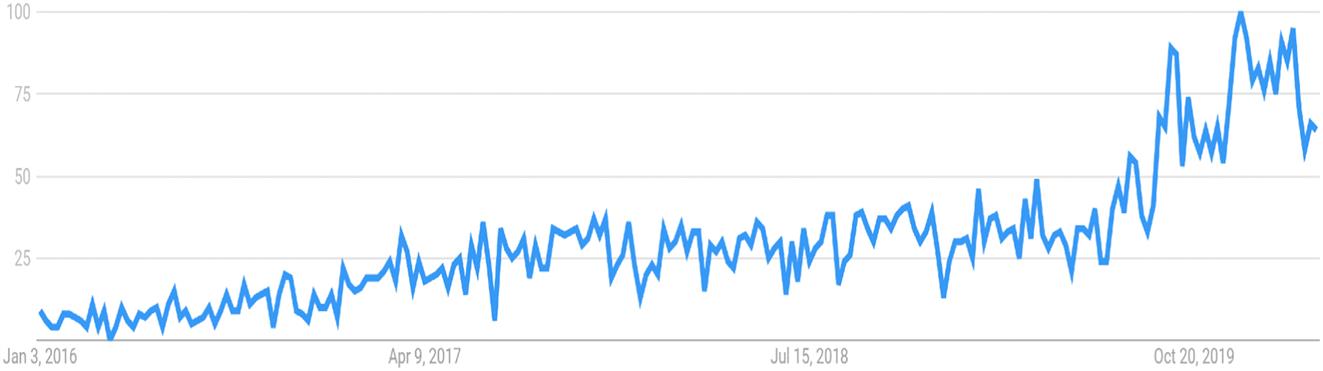
Results demonstrate that the symbiotic human–robot collaboration solution proposed enhances efficiency and improves safety in assembly processes for aerospace development. The strength and repeatability of the robots was successfully paired with human durability, resulting in decreased manual labor, decreased specialized equipment, and reduced time. The method suggested shows that the implementation of robotics is practical, cost-effective, and stable in the historically manual industries. With the stated modular architecture for human–robot communication, complex tasks can be semiautomated. Therefore these findings are also likely to be applied to boost the production processes of other robot-reluctant sectors. The following hardware is used for both the deployment and experiments: 12 GB RAM, i5 3.6 GHz CPU, 4 TB hard drive, and 8 GB NVIDIA graphics card. To train the NN a dataset is required. There is no dataset on user interfaces as far as our search was concerned. Thus during the creation of this research work the dataset was self-generated. In comparison, the dataset comprises three major groups: preparation (70%), validation (15%), and test (15%). Labeling is performed manually, with the assistance of our study community. Using a graphical image classification program, this role is achieved image by image. The output is shown through the xml format containing labeled synchronization and results. To represent the annotation in JavaScript Object Notation (JSON) format we converted the Comma-Separated Value (CSV) file into the form of script and trained it through the YOLO v3 algorithm for all label mappings. Also, Fig. 1.8 shows the analysis of the number of users (in millions) of RPA over the span of 3 years. The y-axis contains the number of users and the x-axis represents the timestamp (Table 1.2).
1.7 Conclusions and future work
In manufacturing industries, robots have been used for a long time, operating securely alongside and learning from humans, but for technological and economic purposes some industries are robot-reluctant. For modern services and more complicated roles, robotics has developed and has a wider variety of capabilities than those used up to now. It is easier to incorporate peripheral technology. The architecture of the modular framework was described for the current collaborative assembly process, including power, protection, and interface modules, where people and robots will share the field of work at the same time without physical separation. Potential uses can be seen in a range of places like some robot-related sectors. In this context, the next steps in this work will concentrate on incorporating special RPA techniques as well as practical applications for other businesses, among others. The robot-reluctant sectors, such as the aerospace industry, will now incorporate cooperation between humans and robots to maximize efficiency, save resources and electricity, and boost operators’ working conditions. For the existing and future manufacturing market, robots are a central feature.