Appendix C
Analysis of Locations of Anchor Points
Anchor points are the optimal points in a string topology network where the addition of a long-ranged link (LL) can result in minimum average path length (APL). The identification of anchor points in a string network can serve many purposes. In Section 4.8, a detailed discussion on the significance of the anchor points can be found. Moreover, a theoretical proof of the optimal location of the first LL can be found in Section 4.8.2. Here, the estimation of the closed-form expressions of S1, S2, and S3, which constitute the total path length expression in Section 4.8.2, are provided in what follows. Note that some of the previously mentioned statements are again used to make the analysis clear.
Assume that is a string graph. Let nodes p1 and p2 be such that if an edge is added between p1 and p2, the graph APL is minimized. It can be noticed that either p1 or p2 would be the anchor point. Therefore, to identify the anchor points obtained by the APL optimal addition of edges to a string graph, it is sufficient to find out where a single edge should be added (i.e., to identify p1 and p2) to minimize the graph APL.
The nodes p1 and p2 are identified by considering a dense string graph. A dense string graph is of a unit diameter where infinitely large numbers of nodes are present. Formally, a dense string graph can be obtained as a limit of a sequence of string graphs, each with nodes (1, 2, . . . , N), as N → ∞. Further, assume that the distance between the nodes i and i + 1, as well as the link to be added between p1 and p2, is . Note that as far as optimization of APL is concerned, scaling all distances in a graph by the same quantity does not matter. The scaling which has been chosen leads to a limit graph consisting of a continuum of nodes in the interval [0, 1] (see Figure C.1(a)).
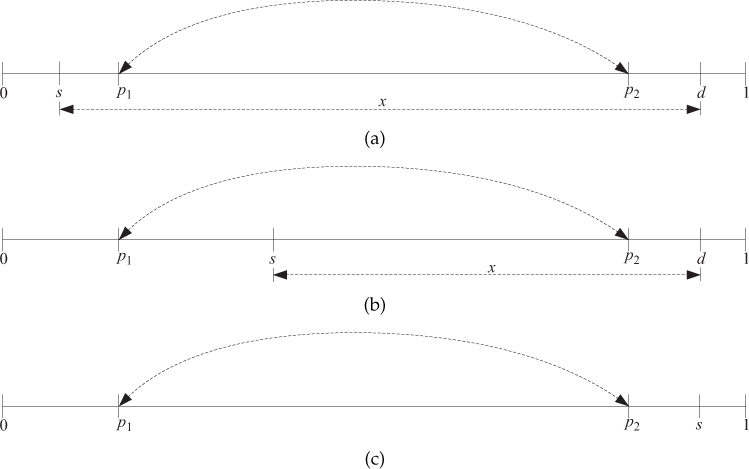
Figure C.1. A dense string graph obtained as the limit of string graphs with N nodes as N → ∞ is shown in (a). The APL is optimized with respect to the fractional positions p1 and p2 of the two anchor points where the first optimally added edge is connected. The shortest path length p(s, d) is different depending on whether s is in [0, p1], (p1, p2), [p2, 1]. These three cases are shown in (a), (b), and (c). In (a), s is placed at the left side of p1 (i.e., Case 1); in (b), s is in between anchor point p1 and anchor point p2 (i.e., Case 2); and in (c), s is at the right side of p2 (i.e., Case 3).
The single-edge addition problem for this limit graph can be formulated as follows. Assume that the edge is added between the positions p1 and p2 for the limit graph where p1, p2 ∈ (0, 1) and p1 < p2. For the limit graph in Figure C.1(a), suppose the shortest path length between nodes s and d is p (s, d). Note that p(s, d) is a function of p1 and p2. By a change of variables, p(s, d) can be written as p(s, x), where x = d − s. Then the total path length of all shortest paths starting from s (and considering only those d to the right of s) is . Then the total path length is
Minimization of the APL for a given graph is equivalent to minimizing the total path length. Hence, the problem is to find and , optimal points for p1 and p2, respectively, that minimize the total path length in Equation (C.0.1).
The function p(s, x) is different depending on whether s ∈ [0, p1], (p1, p2), or [p2, 1]. Therefore, Equation (C.0.1) can be considered as the sum of three integrals, S1, S2, and S3 where each term corresponding to the integral of s in [0, p1], (p1, p2), or [p2, 1] is discussed in the following.
a) Case 1: When s ∈ [0, p1], the following subcases arise (see Figure C.1(a)):
When s + x ≤ p1, p (s, x) = x.
When p1 < s + x ≤ p2, then
When p2 < s + x
Then it can be seen that
where is
b) Case 2: When s ∈ (p1, p2), there are two possibilities (see Figure C.1(b)) for the shortest path p (s, x):
When s + x ≤ p2,
When s + x > p2,
Similarly, using Equation (C.0.1), S2 is obtained as
where
c) Case 3: When s ∈ [p2, 1] (see Figure C.1(c)), from Equation (C.0.1) it can be obtained that
Combining Equation (C.0.2), Equation (C.0.3), and Equation (C.0.4), the following observations can be made:
Therefore, our problem is to
Note that P(p1, p2) is a strictly convex function (Hessian with respect to p1 and p2 can be shown to be positive definite) in the constraint set and can be solved in constant time.
The optimal values of p1 and p2—that is, and , respectively—can be obtained from Equation (C.0.6), as 0.2071 and 0.7929, which are unique. Figure C.2 shows a 2-D contour plot of the objective function P(p1, p2). From the analytical derivation, therefore, it can be seen that the fractional positions of the anchor points for a dense string topology network coincide with the observation in [74].

Figure C.2. Objective function P(p1, p2) in the constraint set p1 < p2. © [2016] IEEE. Reprinted, with permission, from A. Chakraborty, Vineeth B. S., and B. S. Manoj, “Analytical identification of anchor nodes in a small-world network,” in IEEE Communications Letters, vol. 20, no. 6, pp. 1215–1218, June 2016.