
3 Transfer and Conversion of Field Power
3.1 Poynting’s Theorem: Poynting Vector*
The basis for investigating energy motion in electromagnetic fields is Poynting’s theorem [3.3] and the Poynting vector (Turowski [1.15], [3.4]). Poynting’s theorem says that:
The electromagnetic power Ps flowing into (or flowing out of) a closed volume, across an enclosing surface A, equals to the surface integral of the normal component of the Poynting vector Sn over the entire enclosed surface A:
where
is the Poynting vector, which determines the power and direction of the electromagnetic power flux passing through a surface unit perpendicular to the energy flow direction. Of course,
Poynting’s theorem can be applied to calculation of active, reactive, and apparent power flowing into the investigated space.
Both the power Ps and the vector S can therefore be active, reactive, or apparent, depending on the character and phase of the field components E and H. At sinusoidal variations of these components, we calculate a complex Poynting vector similar to the apparent electric power, that is,
In this case, we obtain the complex Poynting vector, which consists of active and reactive power flowing across the surface unit.
Poynting’s theorem has been proven for any linear and nonlinear medium having hysteresis as well as for nonuniform and anisotropic media. The application and experimental verification of the S vector in numerous works of the author (JT) [2.31, 2.33, 2.34, 4.13, 4.21, 6.15, 7.17, 7.18] and of others have shown its great practical usefulness.
After scalar multiplication of the first Maxwell’s equation (2.1) by E, and of the second one (2.2) by H, and adding them together, we get, for a uniform, isotropic medium:
Considering the vector identity
E curl H – H curl E = –div(E × H)
and introducing the Poynting vector (3.2), we can transform Equation 3.4 into the form
After integration of both sides over the volume V of the investigated space, and after application of Green’s theorem Equation 20.20a to the left side, we obtain finally
where
is the power delivered for increasing the electrical and magnetic energy accumulated in a electromagnetic field in the volume V. The second component on the right-hand side of Equation 3.5 is the power loss due to a current flowing in the resistive volume V. The two last components are related to the conversion of electromagnetic energy of the field into electromechanical energy and to the increased velocity of electric charges ρ, or with braking of a conducting medium which moves with the velocity v. The left side of Equation 3.5 represents the total power flux flowing from outside into the volume V across the external surface area A. This energy is consumed, dissipated, or accumulated in the volume V. Equation 3.5, therefore, expresses the fundamental Poynting’s theorem formulated in the beginning.
Since Poynting’s theorem is a specific case of the general law of conservation of energy, there is no reason to think it is not also valid for media of another character, for instance, media containing internal sources or receivers of electric energy of a type different than mentioned above (e.g., thermoelectric, electrochemical, etc.). In the latter case, this additional energy should be added or subtracted on the right-hand side of Equation 3.5.
On this basis, in 1980 the author formulated (J. Turowski [1.16, 1.20, 3.4]) the notion of the complex Generalized Power Density Vector T and, by analogy to Equation 3.1—the Generalized Theorem on Power Density Vector for coupled fields:
where S = E × H is the complex Poynting vector, U = v (dWmech/dV) is the Umov vector, qF = λ grad Θ the thermal power conduction flux density (Fourier’s law), qN the thermal power convection flux density (Newton’s law), qSB the thermal power radiation flux density (Stefan–Boltzmann law), M the light emittance power, Ee irradiance power incident on the surface, I the acoustic sound intensity, Sch the electrochemical power flux density, and so on.
This generalized vector T and its theorem (3.5a) are much more useful for electromechanical engineering, energy conversion analysis, and for the new, modern discipline of Mechatronics* [1.20].
The Poynting vector (3.2) designates the direction and density of the field energy flow in a given point of space. We can, therefore, with its help, calculate the power and its distribution in any spot of the investigated system. In the case of AC fields, the vector moduli (not time dependent) of particular components of the Poynting vector are the scalar components of the vector product (3.3) of the coupled fields:
It should be stressed, however, that the product (E × H) is the Poynting vector only in the case when both fields E and H are generated from the same source and mutually related by Maxwell’s equations, at J ≠ 0. Poynting’s theorem concerns also fields of DC currents, but the product E × H will not be the measure of energy of superimposed electrostatic and magnetostatic fields, because in static conditions (∂/∂t = 0, J = 0) the whole derivation of Poynting’s theorem loses its sense, because it is based on the assumption of J ≠ 0.
A more accurate analysis (A. A. Vlasov, Moscow, 1955) showed also ground-lessness of the supposition that the Poynting vector (3.2) is an ambiguous quantity, what supposedly would follow from the identity ∮A curl P · dA ≡ 0 and therefore ∮A S · dA = ∮A (S + curl P) · dA, where P is any vector.
3.2 Penetration of the Field Power into a Solid Conducting Half-Space
Let us consider a typical case of conversion of electromagnetic field energy into a thermal energy in a conducting medium. In the case of a plane wave, the field components in the direction of field motion equal zero. If we investigate the motion of a plane wave in metal, then as it follows from Equations 2.180 and 2.202, it can be accepted with high accuracy that such a wave always moves in the direction perpendicular to the metal surface. If we select such a coordinate system that the XY plane overlaps with the surface of metal half-space, then in formulae (3.7) one should substitute Ez = 0 and Hz = 0, from which it follows: Sx = Sy = 0. Then, there remains only the component Sz = S.
Using the field components (2.173) and (2.175), we obtain
from where the field power density, in VA/m2, at the distance z from the metal surface
where
Modulus of the active component of the Poynting vector, corresponding to the active power (in W/m2) flowing through a surface unit, equals to
Modulus of the reactive component of the Poynting vector, corresponding to the reactive power (in var/m2) flowing through a surface unit, has the same value, but different units
Sq = Sp
As it follows from formula (3.9), the power of an electromagnetic wave entering into a solid metal half-space is attenuated in the same way as a field, that is, according to exponential functions, but much faster (2.173, 2.175). In Figure 2.11, we presented a graph of attenuation of the current density (field attenuation) and of square of attenuation (the power attenuation). Beyond the depth z = λ/2 from the surface (kλ = 2π), only e−2kπ × 100% = 0.185% of the total energy is left to be consumed by the conducting medium. This is why one can assume that an electromagnetic wave is damped at the depth 2× shorter than the wavelength, given in Table 2.1. If the thickness of a metal part is larger than half of a wavelength (in the case of steel, at 50 Hz and μr = 300–1000, larger than 5–3 mm, and in the case of copper larger than 30 mm), then at one-sided wave penetration such a part can be considered infinitely thick (the so-called half-space) because an electromagnetic wave is almost completely extinguished before reaching the opposite surface. The electromagnetic wave which entered such a half-space moves only in one direction until its complete extinction and has no possibility to get outside.
This is why one can recognize that the Poynting vector S at any point z inside a solid metal half-space (Figure 2.11) is the measure of the total per-unit power consumed in the space on the right-hand side from this point. Per the same principle, one can assume that the power consumed by a solid metal half-space equals the Poynting vector S value on the surface of this space (at z = 0) multiplied by the area of this surface. If the Poynting vector has unequal values in different points on this surface, the power loss should be calculated by integration of S(x, y, z = 0) on the whole surface of the body.
According to Equation 3.9, the Poynting vector in the complex form on the surface of a metal half-space is expressed by the formula:
and its active component equals to the loss density on the surface, P1 (in W/m2):
where ap = 1 for μ = const, and ap ≈ 1.4 for steel (Chapter 7) [3.4].
According to Equation 2.176, the per-unit flux Φmy1 on the surface of a metal half-space per 1 m of width of its track equals, in Wb/m
and according to Turowski ([1.16], p. 30), its modulus
The reactive component of the Poynting vector equals the per-unit consumption of reactive power by a steel half-space, in var/m2
where aq = ap = 1 for μ = const and aq ≈ 0.85 and ap ≈ 1.4 for steel.
Example
Calculate the per-unit power P1 and the maximum magnetic flux Φm1 for a surface unit of a steel element with the wall thickness d > λ/2, on which one side impinges a plane electromagnetic wave of 50 Hz, creating on its surface the resultant field Hms = 40 A/cm.
Solution
Assuming the average value of steel conductivity σSt,20°C = 7 × 106 S/m (Table 1.6) and from Figure 1.29, curve 2, the permeability on the surface μrs ≈ 320 for Hms = 4000 A/m, per Equation 3.10a, we calculate the per-unit power
and per Equation 3.11a, the per-unit flux in the steel wall
These numbers can be considered as initial values at assessments of permitted electromagnetic loads of steel constructional elements from the viewpoint of local overheating hazards (Chapter 9).
The power in a metal half-space per volume unit, in W/m3
where P1 is the active power per surface unit (W/m2) in the metal half-space.
3.3 Power Flux at Conductors Passing through a Steel Wall
The power of electric current flowing through electric line conductors is transported by an electromagnetic field surrounding these conductors. Physically it is explained that although electrons inside the conductors move along the electric field with velocity barely ca. 0.2 mm/s, the impulse and electromagnetic field move with velocity near 300,000 km/s. With the same speed is transmitted electric energy. Mathematically, the whole flux of power flowing along conductors can be calculated by the integration of the power flux density, that is, the Poynting vector, through an infinite plane perpendicular to the conductor axes.
Let us consider the power flow in the case when two current-carrying conductors pass through a metal wall (Figure 3.1), which may be a cover of a power transformer, or a metal wall with a thickness d > λ. From the total power flux flowing in surroundings of the conductors and meeting the barrier in the form of impenetrable transformer cover, one can distinguish the following components of Poynting vector in particular points of space (Figure 3.1):

Figure 3.1 The field components, H and E, and the Poynting vectors S, at conductors passing through a steel cover of transformer tank (Turowski [2.31]): E1, H1, S1—the field incident on steel surface, E2, H2, S2—the reflected field, E3, H3, S3—refracted (penetrating) to the steel body of cover; Scu—into copper bushings; Sg—density of the general (main) power flux (W/m2) incoming and outgoing from the inside of transformer.
The main vector Sg corresponding to the power density flowing into the transformer. It is directed along the conductors. This vector can be split into two components: the component of power which is the incident on the cover surface, S1, and the component of reflected power, S2.
The vector of power penetrating the solid steel of cover, S3. It represents the power losses in the cover.
The vector of power penetrating into the current-carrying conductors, SCu. It is directed perpendicularly to the surface of the conductors and its active component equals to the per-unit losses in the conductors.
The above considerations follow from the following simple equations
which, after considering Poynting’s theorem (3.1), gives the total losses in conductors:
In an analogical way, the reactive component of the SCu vector determines the internal reactance of conductors.
An investigation of the electromagnetic field and power losses in the cover alone, the component SCu can be skipped, assuming that the bushings are made of a very good conductor.
The refracted vector S3 of the power-penetrating metal of the cover through all its surfaces; it is directed perpendicularly to the cover surfaces. This vector will be used in the calculation of losses in covers and other constructional metal parts of electric machines and apparatus.
The main flux of power Smain ≡ Sg (Figure 3.1), carrying the power flowing into or out of the transformer, squeezes almost totally through the isolation (porcelain) gap around the bushing conductor if the thickness of the cover is sufficiently big (d > λ) and has no other holes filled with dielectric in which an electromagnetic field would exist. The power flux flowing into the transformer does not depend on the thickness of the mentioned isolation gap, because the thinner is the gap the bigger will be value of the vector E, and therefore vector S. In the case of a metallic connection, when the isolation gap does not exist, a short-circuit occurs and then no power flux or current can penetrate through the cover.
The total power flow into a transformer exclusively through holes filled by dielectric can be easily checked quantitatively. In a single-phase transformer, both on the primary and the secondary side, only two bushings are present. The electric field intensity in the central plane of the hole in the steel sheet amounts to
where u is half of the line voltage, that is, 2u = uline; R the radius of the hole for bushing; r1 the radius of the conductor in bushing. Usually, the distance between bushings is so large in comparison with the radius of hole that one can assume that in the hole exists the magnetic field intensity H = i/(2πr).
Since both fields are perpendicular to each other, the modulus of the vector of power density in the hole per surface unit has the value
and an element of the considered surface is dA = 2πr ⋅ dr. The instant power flowing into the transformer tank by two holes, according to Poynting’s theorem, therefore, equals
which proves that the entire instantaneous power passes only by the isolation of the bushing holes (Figure 3.2).

Figure 3.2 A schematic picture of the power flow through the cover of a transformer tank, the Poynting vector (S) lines, with ignoring the eddy current losses. (Adapted from Turowski J.: Electromagnetic field and losses in the transformer housing. (in Polish). “Elektryka” Science Papers, Technical University of Lodz., No. 3, 1957, pp. 73–63.)
In Figure 3.2, the continuous lines represent the power flux lines (lines of the Poynting vector S) and the dashed lines represent the lines of the force of an electric field E. Lines of vector H lie in planes parallel to the surface of the tank cover. Figure 3.2 does not present quantitative interdependences. Such plots are created on the basis of perpendicularity of the lines of vector S to the planes of vectors E and H.
In case when the thickness d of a cover or screen is smaller than the wavelength (d < λ) in metal (Table 2.1), a certain fraction of the field power penetrates into the tank directly through the cover, which in this case becomes transparent to the electromagnetic field (Section 4.3).
3.4 Power Flux in a Concentric Cable and Screened Bar
Reasoning as above and assuming that in formula (3.14) u means the voltage between conductors of the cable, we can see that the total power ui transmitted by the cable is transported by the electromagnetic field moving in parallel to the cable axis in dielectric enclosed between internal and external conductors of cable. This power flows, however, not as a uniform flux but is more concentrated near the surface of the internal conductor and decays according to Equation 3.14 inversely proportionally to square of the distance r from the cable axis (Figure 3.3).
A similar picture of the power flux distribution occurs in screened bars used in power generators and transformer systems of power stations. In such a case, each of three bars of a three phase system is enclosed in a cylindrical screen. The screens are either grounded or connected together on both ends, directly or through reactors. In such systems, the magnetic field of bar gets out indeed outside of the screen, but the electric field exists practically only in the insulation space between bar and screen. Therefore, the power, similarly as in a concentric cable, is transported in this case also only through the enclosed space.

Figure 3.3 Distribution of the Poynting vector (power density) in cross-section of a concentric cable.
3.4.1 Factors of Utilization of Constructional Space
One of the most important factors of technology advancement is reduction of space (limiting outlines) occupied by electromagnetic equipment. Especially it is seen in switching stations and devices with SF6, occupying several times smaller space than conventional constructions.
The main reserves are in a nonuniform distribution of the Poynting vector (power density), measure of which can be the factor of utilization of constructional space
The factor (3.15) can assume values within the range 0 ≤ ηS ≤ 1. For instance, for a concentric cable, ηs = r12 /R2, which means that a small change of one of the diameters causes a significant change of ηS. For the interwinding gap of a transformer, however, ηS ≈ 1.
Another factor could be the ratio ηP = Pvar/Punif of the total powers P = ∫∫AS dA at a nonuniform Pvar distribution to the flux Punif at a uniform distribution of the Poynting vector (power density).
Another factor here is the highest possible value Smax, which in turn is limited by the electric field strength of space. As per Equation 3.14, for cables with a constant utilization of conductors (u = const, i = const, r = const)
Assuming, for example, for a concentric cable: R/r12 = 2.718, we get ηS = 1/e2 = 0.136. The maximum value of the Poynting vector for such a cable, with parameters 35 kV, 400 A, cross-section 185 mm2, r1 = 7.5 mm, R = er1 = 2.7 · 7.5 = 20.2 mm, would be
It is not difficult to estimate how the transmission power of the cable could be increased if the factor ηS was made higher. It is possible by means of multilayer structures. These conclusions should of course take into account material and processing limitations.
3.5 Power Flux in a Capacitor, Coil, and Transformer
A capacitor and a cylindrical coil can be considered as the simplest constructional elements. They can, at the same time, serve as models of more complex systems, for instance—transformers. In a parallel-plate capacitor (Figure 3.4) connected to an alternating voltage u, in the part in which the field is uniform, we have

Figure 3.4 Distribution of power flux in a parallel-plate capacitor; S—Poynting vector = power flux density (VA/m2).
Ignoring the edge deformations of the field (the so-called fringing fields) and taking into account the sense of vectors (3.17) we can see that the Poynting vector in any considered moment is directed toward the capacitor center axis, and equals
After multiplying this value by the lateral surface 2πra, we can see that the entire power flux entering to capacitor field by its lateral surface equals to u ⋅ i delivered to capacitor, as expected. The power flow into or out of the capacitor occurs along the equipotential lines, which in Figure 3.4 is shown by the arrows, at a moment of increasing voltage. At decreasing voltage, the sense of the instantaneous vectors S changes to the opposite one. The power flux in a capacitor connected to an alternating voltage oscillates with frequency 2f.
In a resistance-less cylindrical coil (Figure 3.5), supplied by an alternating voltage, the magnetic field H (dashed lines) inside the coil in a considered moment is directed toward the top, and outside—toward the bottom. The electric field E is tangential to the rings created by turns and directed according to the electromotive force (EMF) induced by the flux of the coil. As a result, the vector S (continuous lines) goes out from the coil surface to the ambient surroundings in both directions.
Similarly as before, it is easy to show (Turowski [1.15]) that the entire flux of an electromagnetic field delivered to the coil leaves (or enters) by its lateral surfaces— external and internal. The direction of power flow changes with frequency 2f. During one quarter period of the network frequency the magnetic energy is accumulated in the coil field, and then, during the next quarter period, it is given back to the network. This is the so-called reactive power.
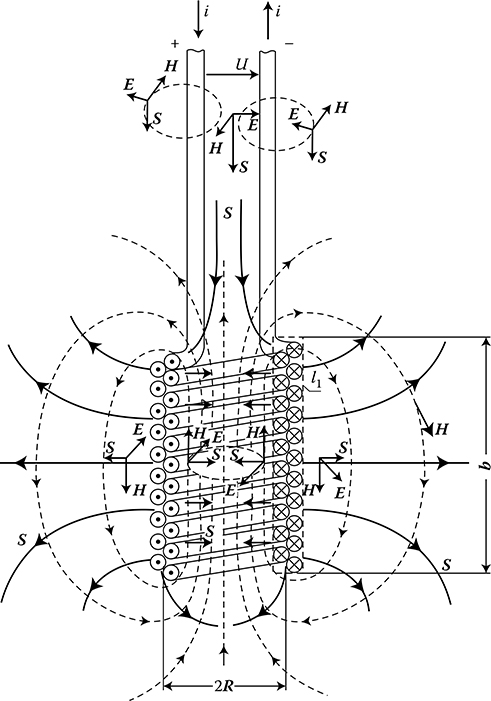
Figure 3.5 Distribution of power flux in a cylindrical coil.
The active power flux (power losses) P1 = Sp (in W/m2) has always the same sense—toward the receiver. In Figure 3.5, the lines (continuous) are shown of the Poynting vector S at the moment when the reactive power is delivered to the coil from the network side. In a similar way, a distribution of power in a coil with iron core or in a transformer at no load will occur.
The described distribution of electromagnetic power concerns a smooth coil as a whole. It could be, of course, subdivided into particular twists around different discrete elements, such as turns of coil, leads, interconnections, and so on, as it was done in the work of Leites [3.2]. However, it is not necessary in practice.
In the short-circuit condition of a power transformer almost all the magnetic flux is displaced into the interwinding gap. There, as a leakage field, it induces in both windings electric fields of inverse senses. Therefore, approximately in the center of the gap there exists a cylindrical surface on which E = 0, and hence S = 0. Thus, the gap is a barrier through which at short-circuit condition no power flux can pass from the primary to the secondary winding, except the power loss in secondary winding.
In a loaded power transformer the senses of E in both windings are the same. Thanks to it the power flux S transfers from the primary winding to the secondary winding and to the magnetic core without obstacles. In the author’s book [1.15] the flow and distribution of power flux in a loaded transformer and in conductors in motion are discussed in more detail.
As we can see from the above figures, such a graphic illustration of the power flow S(x, y) is quite simple for any electromechanical system. It is only necessary to determine lines of fields H and E. It can be sometimes useful in practice, like for instance that case in Figure 3.2. In the next section, let us consider such power flow in rotating machines.
3.6 Power Fluxes and Their Conversion in Rotating Machines
3.6.1 Power Flux of Electromagnetic Field in Gap of Induction Machine
As shown by Bron [3.1] and other authors, the Poynting vector lines can be determined for any kind of machine operation. The angular speed of rotor ω = 2πn = ωs(1 − s), where n is the rotational speed (in rev/s), ωs = 2πf is the synchronous speed (at the assumption that the number of pairs of poles p = 1), and s = (ns − n)/ns is the slip.
At the synchronous speed, ω = ωs, no current flows in the rotor. A rotating field of amplitude Bδm* (Figure 3.6a) induces in the gap δ the electric field Eδm = –vs × Bδm, directed toward the observer, where vs = πDns is the linear speed, ns = f/p is the rotational speed (in 1/s), and D is the internal diameter of stator. In this case, the vector S is directed along the stator circumference. The right-hand picture in Figure 3.6a shows lines of the vector Sq = Eδm × Hδm. In this case, no exchange of energy between the stator and rotor exists.
At no-load, ω ≈ ωs, the picture is similar, but at a relatively big no-load current.
At load (motor operation, Figure 3.6b), the rotor is delayed in relation to the rotating field (ω < ωs). Due to the currents induced in rotor conductors, in the gap appears the flux density Bmr directed along the circumference. It gives the resultant field in the gap, Bm = Bδm + Bmr, and a new active component Sp directed toward the rotor. Integration of this active component, according to Poynting’s theorem (3.1), equals to the power output P on the motor shaft and losses in rotor. The losses in rotor are comparatively small.
At rotor speed ω ≥ ωs (generator operation) the pictures are the reverse of Figure 3.6a.

Figure 3.6 Power transfer in the air gap of an induction machine: (a) no-load operation, (b) motor operation Bp ≡ Bδ. (Modified from Bron, O.B.: Electromagnetic Field as a Form of Matter. (in Russian). Moscow: Gosenergoizdat, 1962.)
At braked rotor (ω = 0) the state is similar as with a short-circuited transformer; the rotor consumes only loss.
3.6.2 Power Flux of Electromagnetic Field in Air Gap of Synchronous Machine
In a smooth air gap of synchronous machine, similar to an induction machine, a sinusoidal rotating field of amplitude Bδm equals (Turowski J. [1.18])
At no-load, and at synchronous rotation with the angular velocity ωs = 2πf = 2πpns, in the air gap exists only the flux density B0 directed radially (Figure 3.7). This field induces in the gap the electric field
The vector E0 is proportional to B0 and directed along the machine axis toward the observer in Figure 3.7a. Both these vectors give the instantaneous Poynting vector S0, whose modulus is

Figure 3.7 Motion of the electromagnetic power flux in a synchronous machine: (a) no-load operation; (b) inductive load (overexcitement); (c) capacitive load (underexcitement); (d) active load of generator Bt ≡ Ba. (After Bron, O.B.: Electromagnetic Field as a Form of Matter. (in Russian). Moscow: Gosenergoizdat, 1962.)
The vector S0 is tangential to the circumference of the machine and its lines in the gap are parallel to the stator surface. From Poynting’s theorem (3.1), we get the instantaneous power:
where l is the active length of the armature (stator).
Let us now consider the typical cases of machine operation.
At an ideal inductive load (Figure 3.7b) or capacitive load (Figure 3.7c) the flux of an armature reaction Bt ≡ Ba ≡ Bd of the maximal value Bdm is directed along the magnetic axis of poles. The Bdm is in the opposite direction with respect to the pole flux when the load is inductive, and in accord at a capacitive load. In this way, by controlling the excitation current Im so that to keep Bdm constant (to reduce the voltage fluctuations) we obtain the same picture of the vector S lines as in Figure 3.7a. The regulation of the excitation current Im does not therefore affect the movement of active power.
At an ideal active load (Figure 3.7d), the field lines start to “pull” rotor (like springs) after stator field—in motor, or to “pull” stator field after rotor—in generator. As a result, the vector S obtains an additional radial component toward rotor, or vice versa, respectively.
By loading a generator at constant excitation Bm0 = Bδm = const, we cause a resultant rotation of the effective flux density vector Bme by the angle γ with respect to the pole axis and increase of flux density in the gap according to dependence
Ignoring details, we can note that the angle γ is not much smaller than the angle of load θ of synchronous machine [1.18]. The biggest difference at active load can be determined from the ratio sin γ sin θ ≈ xa/xs.* The Poynting vector S1 will be turned by the same angle, since the vector E0 will not change its position nor value.
Modulus of the normal component of the Poynting vector S1 toward armature surface (Figure 3.7d) is
and is the measure of the power transferred from the air gap to armature (stator) per its surface unit.
The total power flux entering the stator at a constant excitation is
Formula (3.24) offers the possibility of rapid determination of main dimensions of the machine, or the power which can be obtained from the object with given dimensions.
Example
Examine what active power can be obtained from a turbine-generator with a rotation speed of 50 rev/s, 50 Hz, and main dimensions at: l = 4.7 m, D = 1.31 m, δair = 80 mm, working at a constant excitation corresponding to no-load flux density in the gap (δ) Bδm ≡ Bmp = 1.06 T, at the load angle in the range θ = 10–13°.
Solution
In the first approach, we can adapt tg γ ≈ tg θ = 0.176–0.231. From formula (3.24), we obtain
Evidently, windings and magnetic cores should be designed for this power.* The resulting flux density in the gap would be varying in this situation within the limits (3.22)
The power rotating together with the rotating field in the air gap of a generator at no-load, according to dependence (3.21), is
Using a similar method, one can carry out an analogical calculation for constant resultant flux density in the gap, determine electromagnetic torque, and so on.
A similar analysis can be carried out for other types of machines, for instance electrostatic generators (see [1.15]).
Dynamics of turbogenerator operation can be investigated on the basis of the equation relating the electrodynamic and electromechanical energy conversion
where , in which Htq(t) = 1/μ0Btq(t) is the quadrature component of the field in the gap, Wacc—the energy accumulated in electromechanical system, M = M(t)—the shaft output torque, φ—the angle of shaft rotation.
Notes
*This vector in Russian literature is sometimes also called Umov–Poynting vector. Umov, however, investigated motion of mechanical energy in elastic media and the Umov vector U = (dW/dV)V cannot be identified with the Poynting vector E × H.
In this sense, more correct would be the formulation in 1980 by the author ([1.16], pp. 20–21 and 232–233) the generalized vector of power density T = S + U + qF + qN + qSB + M + Ee + I + Sch + … and the corresponding generalized theorem which better matches the energy conservation law.
*Technical committee on Mechatronics of the International Federation for the Theory of Machines and Mechanisms adapted in Prague the definition: “Mechatronics is the synergistic combination of precision mechanical engineering, electronic control and system thinking in the design of products and manufacturing processes” (It should be completed by Engineering Electromagnetics).
*Old standard symbols were Bmp, n1, ω1 = 2πf.
*xa/xs—the ratio of reactances of armature reaction and synchronous one, respectively. In turbogenerators of 120–300 MW it is around 0.9 [1.18].
*It is now a routine job for the specialists [1.3], [1.18], [1.16], [2.3], [2.5], [4.11], [4.32], [5.7], [5.12], [6.3], [6.5], [8.14], [8.15], [8.23], [10.3].