
would catch the mallet on the way up, thereby
keeping it from dampening the sound or double
bouncing on the drum (Figure
C
).
But this method would require finding that
perfect synchronization between the elastic, the
mallet, and the servo position in order to work.
I wrote an Arduino sketch that allowed me to
use potentiometers to dial in the position when
the mallet is down, position when the mallet
is up, and the amount of time in millis()
(milliseconds) between when the down command
and the up command are sent. Once I had the
numbers needed to get the loudest and cleanest
sounding note, I just plugged them into a function
that handles the mallet strike of each robot.
4. SUPPORT STRUCTURE
After part cleaning, thread tapping, and assembly,
I had a complete mallet assembly which, after a
successful test, was duplicated 6 more times to
cover the rest of the notes on the drum.
The next step was a solid surface to mount
them onto. The base, Part E, was designed to
not only hold the servo, but to also help capture
the edge of the drum to keep it held down in
the center of the circle. Care was given to allow
clearance for screwdrivers and screws to reach
their mark as well as the servo cables that
needed an exit path.
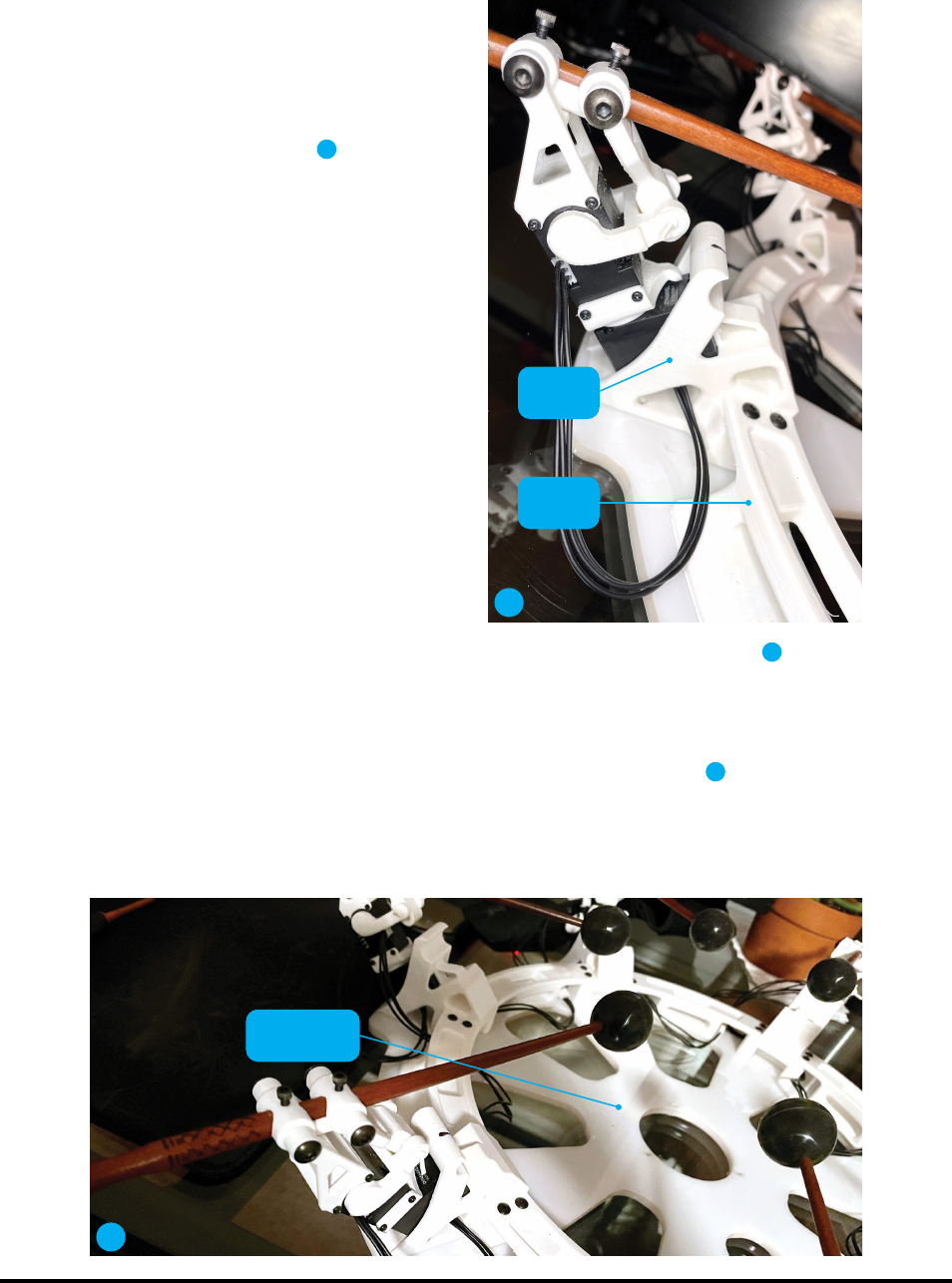
At this point, I still had 7 individual robots with
nothing keeping them grounded at the proper
location relative to the drum. I designed some
bridge parts, Part F, to help fix the robots in their
proper place and orientation (Figure
D
).
Now the servos were bolted together into
a single assembly, but it needed a little more
support, so a piece of acrylic was laser cut to
become the foundation, Part G, that everything
was then bolted onto (Figure
E
). I could have
designed it as 7 pieces that could be grown on
a 3D printer, but because I had a laser cutter
available, the simplest solution was to laser cut a
single part and bolt everything onto it.
Part G:
foundation
Part E:
base
Part F:
bridge
D
E
67
make.co
M81_064-69_DoorbellBot_F1.indd 67M81_064-69_DoorbellBot_F1.indd 67 4/12/22 11:37 AM4/12/22 11:37 AM
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.