Chapter 5: Hardware-Software Interface
The vast majority of computer software is not written at the processor instruction level in assembly language. Most of the applications we work with on a daily basis are written in one high-level programming language or another, using a pre-built library of capabilities that the application programmers extended during the software development process. Practical programming environments, consisting of high-level languages and their associated libraries, offer many services, including disk input/output (I/O), network communication, and interactions with users, all easily accessible from program code.
This chapter describes the software layers that implement these features, beginning at the level of processor instructions in device drivers. Several key aspects of operating systems will be covered in this chapter, including booting, multithreading, and multiprocessing.
After completing this chapter, you will understand the services provided by operating systems and the capabilities provided in Basic Input/Output System (BIOS) and Unified Extensible Firmware Interface (UEFI) firmware. You will have learned how execution threads function at the processor level and how multiple processors coordinate within a single computer system. You will also have a broad understanding of the process of booting into an operating system, beginning with the first instruction executed.
We will cover the following topics:
- Device drivers
- BIOS and UEFI
- The boot process
- Operating systems
- Processes and threads
- Multiprocessing
Device drivers
A device driver provides a standardized interface for software applications to interact with a category of peripheral devices. This avoids the need for the developer of each application to understand and implement all of the technical details required for the proper operation of each type of device. Most device drivers allow multiple simultaneously executing applications to interact with multiple instances of associated peripherals in a secure and efficient manner.
At the lowest level of interaction, device driver code provides software instructions that manage communication interactions with the peripheral, including handling interrupts generated by device service requests. A device driver controls the operation of hardware resources provided by the processor, the peripheral device, and by other system components such as the processor chipset.
In computer systems supporting privileged execution modes, device drivers usually operate at an elevated privilege level, which grants access to peripheral interfaces that are inaccessible to less privileged code. This ensures that only trusted code is permitted to interact with these interfaces directly. If unprivileged application code were able to access a peripheral's hardware interface, a programming error that caused the device to behave improperly would immediately affect all applications that attempt to use the device. The steps involved in transitioning the flow of instruction execution and data between unprivileged user code and privileged driver code will be introduced in Chapter 9, Specialized Processor Extensions.
As we learned in Chapter 3, Processor Elements, the two principal methods for accessing I/O devices are port-mapped I/O and memory-mapped I/O. Although memory-mapped I/O is predominant in modern computers, some architectures—such as x86—continue to support and use port-mapped I/O. In an x86 system, many modern peripheral devices provide an interface that combines port-mapped I/O and memory-mapped I/O.
Programming tools for modern operating systems, such as those available for Linux and Windows, provide resources for developing device drivers capable of interacting with peripheral devices using port- and memory-mapped I/O techniques. Installing a device driver in these operating systems requires elevated privilege, but users of the driver do not require any special privileges.
Although device drivers for sophisticated peripheral devices can be quite complex and difficult to understand for those not intimately familiar with the device's hardware and internal firmware, some legacy devices are fairly simple. One example is the parallel printer port introduced on early PCs, and a standard component of personal computers for many years. Even though modern computers rarely include these interfaces, inexpensive parallel port expansion cards remain readily available, and modern operating systems provide driver support for these interfaces. Electronics hobbyists frequently use a parallel port as a simple interface for interacting with external circuits using Transistor-Transistor Logic (TTL) 5V digital signals on PCs running Windows or Linux.
The next section will examine some of the device driver-level details of the parallel port interface.
The parallel port
The programming interface for the PC parallel printer port consists of three 8-bit registers, originally located at sequential I/O port numbers beginning at 0x378. This collection of I/O ports provides the interface for printer 1, identified as LPT1 in PC-compatible computers running MS-DOS and Windows. Modern PCs may map the parallel port to a different range of I/O ports during Peripheral Component Interconnect (PCI) device initialization, but operation of the interface is otherwise unchanged from early PCs.
Device drivers for the parallel port in modern computers perform the same functions using the same instructions as in early PCs. In this section, we'll assume that the printer port is mapped to the legacy I/O port range.
To interact with parallel port hardware, the x86 processor executes in and out instructions to read from and write to I/O ports, respectively. If we assume the parallel port driver has been installed and initialized, a user application can call a driver function to read the data present on the parallel port input lines. The following pair of instructions within the driver code reads the digital voltage levels present on the eight data lines of the parallel port and stores the resulting 8-bit value in the processor's al register:
mov edx,0x378
in al,dx
In x86 assembly language, instructions containing two operands are written in the form opcode destination, source. This example uses the al, edx, and dx processor registers. The al register is the lowest 8 bits of the 32-bit eax register. dx is the lowest 16 bits of the 32-bit edx register. This sequence of instructions loads the immediate value 0x378 into the edx register, and then reads the 8-bit data value from the port number contained in dx into al.
The C language source code that generated the preceding assembly instructions is as follows:
char input_byte;
input_byte = inb(0x378);
The inb function is provided by the Linux operating system to perform 8-bit input from an I/O port. This code will only function properly if it is running at the elevated privilege level of the operating system. An application running with a user privilege will fail if it attempts to execute these instructions, because such code is not authorized to perform port I/O directly.
Drivers that execute at this elevated level are referred to as kernel-mode drivers. The kernel is the central core of the operating system, serving as the interface between computer hardware and higher-level operating system functions such as the scheduler.
The instructions for writing a byte to the parallel port data register, and thus setting the state of the eight digital output signals, are shown in the following code block:
mov edx,0x378
movzx eax,BYTE PTR [rsp+0x7]
out dx,al
These instructions set the edx register to the port number, and then load eax from a variable on the stack. rsp is the 64-bit stack pointer. rsp is 64 bits because this driver is running on a 64-bit version of Linux. movzx stands for "move with zero extension", which means move the 8-bit data value (designated by BYTE PTR) at the address given as rsp+0x7 into the lower 8 bits of the 32-bit eax register, and fill the 24 remaining bits in eax with zeros. The final instruction writes the byte in al to the port number in dx.
The C source code that produces these instructions is as follows:
char output_byte = 0xA5;
outb(output_byte,0x378);
Similar to inb, the outb function is provided by Linux to enable device drivers to write an 8-bit value to the given I/O port.
This example demonstrates how interaction between software executing on the processor and peripheral device hardware registers happens at the lowest level of device driver operation. Drivers for more complex devices on x86 systems usually combine port-mapped I/O (as shown in the preceding examples) with memory-mapped I/O, which accesses a device interface using reads and writes that are, in terms of processor instructions, identical to memory accesses.
These examples presented hardware access methods used by drivers on the original parallel PCI bus architecture. The next section discusses features that allow legacy PCI drivers to continue to operate properly on modern PCI Express (PCIe)-based computers, taking full advantage of PCIe's high-speed serial communication technology.
PCIe device drivers
As we saw in the previous chapter, PCIe uses high-speed serial connections for communication between the processor and PCIe peripheral devices. You may be wondering about the steps a device driver must perform to interact with this fancy hardware. The simple answer is that drivers do not need to do anything special to take full advantage of the high-performance capabilities of PCIe. PCIe was expressly designed to be software-compatible with the parallel PCI bus used in PCs of the 1990s. Device drivers written for PCI continue to work properly in computers using the serial PCIe bus. The task of translating between processor I/O instructions such as in and out and the sequential serial data transfers necessary to communicate with PCIe devices is handled transparently by the PCIe bus controllers in the processor, chipset, and PCIe devices.
PCI and PCIe devices perform an automated configuration operation during system startup and when a device is hot plugged in a running system. Hot plugging is the installation of hardware in a system that is powered on.
Once configuration is complete, the device interface is known to the operating system. The interface between a PCI or PCIe peripheral and the processor may include any combination of the following communication paths:
- One or more I/O port ranges
- One or more memory regions supporting memory-mapped I/O
- Connection to a processor interrupt handler
The interface configuration procedure applies to both PCI and PCIe drivers, enabling legacy PCI drivers to work properly in PCIe systems. Of course, the physical card interface differs greatly between parallel PCI and serial PCIe devices, so the cards themselves are not interchangeable across bus technologies. The bus slots for PCIe are intentionally different from PCI slots to prevent the accidental insertion of PCI devices into PCIe slots, and vice versa.
Bulk data transfer to and from peripheral devices generally relies on Direct Memory Access (DMA) in both PCI and PCIe systems. In PCIe systems, DMA operations take full advantage of the high data rates possible with multi-lane serial connections, blasting data across the interface at close to the theoretical maximum speed each single- or multi-lane link can support. The technological evolution that supplanted legacy parallel bus PCI technology with the vastly higher-performing multi-lane serial technology of PCIe, while retaining seamless device driver compatibility, has been quite remarkable.
Device driver structure
A device driver is a software module that implements a set of predefined functions, enabling the operating system to associate the driver with compatible peripheral devices and perform controlled access to those devices. This allows system processes and user applications to perform I/O operations on shared devices.
This section provides a brief overview of some of the most commonly used functions a Linux device driver must implement for use by application developers. This example will prefix the function names with the fictitious device name mydevice and is written in the C programming language.
The following functions perform tasks related to initialization and termination of the driver itself:
int mydevice_init(void);
void mydevice_exit(void);
The operating system calls mydevice_init to initialize the device at system startup or at a later time if the device is connected by hot plugging. The mydevice_init function returns an integer code, indicating if the initialization was successful or, if unsuccessful, the error that occurred. Successful driver initialization is indicated by a return code of zero.
When the driver is no longer needed, such as during system shutdown or when the device is removed while the system is running, mydevice_exit is called to release any system resources allocated by the driver.
The next pair of functions, shown here, allows system processes and user applications to initiate and terminate communication sessions with the device:
int mydevice_open(struct inode *inode, struct file *filp);
int mydevice_release(struct inode *inode, struct file *filp);
mydevice_open attempts to initiate access to the device and reports any errors that may occur in the process. The inode parameter is a pointer to a data structure containing information required to access a specific file or other device. The filp parameter is a pointer to a data structure containing information about the open file. In Linux, all types of devices are consistently represented as files, even if the device itself is not inherently file-based. The name filp is short for file pointer. All functions operating on the file receive a pointer to this structure as an input. Among other details, the filp structure indicates whether the file is opened for reading, writing, or both.
The mydevice_release function closes the device or file and deallocates any resources allocated in the call to mydevice_open.
Following a successful call to mydevice_open, application code can begin to read from and write to the device. The functions performing these operations are as follows:
ssize_t mydevice_read(struct file *filp, char *buf,
size_t count, loff_t *f_pos);
ssize_t mydevice_write(struct file *filp, const char *buf,
size_t count, loff_t *f_pos);
The mydevice_read function reads from the device or file and transfers the resulting data to a buffer in application memory space. The count parameter indicates the requested amount of data, and f_pos indicates the offset from the start of the file at which to begin reading. The buf parameter is the address of the destination for the data. The number of bytes actually read (which may be less than the number requested) is provided as the function return value, with a data type of ssize_t.
The mydevice_write function has most of the same parameters as mydevice_read, except that the buf parameter is declared const (constant) because mydevice_write reads from the memory address indicated by buf and writes that data to the file or device.
One point of interest in the implementation of these functions is that the privileged driver code cannot (or at least should not, if the system permits it) access user memory directly. This is to prevent driver code from accidentally or intentionally reading from or writing to inappropriate memory locations, such as kernel space.
To avoid this potential problem, special functions named copy_to_user and copy_from_user are provided by the operating system for use by drivers to access user memory. These functions take the necessary steps to validate the user-space addresses provided in the function call before copying data.
This section provided a brief introduction to the hardware-level operations performed by device drivers and introduced the top-level structure of a device driver.
During system power-up, before the operating system can boot and initialize its drivers, firmware must execute to perform low-level self-testing and system configuration. The next section presents an introduction to the code that first executes when the computer receives power: the BIOS.
BIOS
A computer's BIOS contains the code that first executes at system startup. In the early days of personal computers, the BIOS provided a set of programming interfaces that abstracted the details of peripheral interfaces such as keyboards and video displays.
In modern PCs, the BIOS performs system testing and peripheral device configuration during startup. After that process has completed, the processor interacts with peripheral devices directly without further use of the BIOS.
Early PCs stored the BIOS code in a read-only memory (ROM) chip on the motherboard. This code was permanently programmed and could not be altered. Modern motherboards generally store the motherboard BIOS in a reprogrammable flash memory device. This allows BIOS updates to be installed to add new features or to fix problems found in earlier firmware versions. The process of updating the BIOS is commonly known as flashing the BIOS.
One downside of BIOS reprogrammability is that this capability makes it possible for malicious code to be introduced into a system by writing to the BIOS flash memory. When this type of attack is successful, it enables the malicious code to execute every time the computer starts up. Fortunately, successful BIOS firmware attacks have proven to be quite rare.
As the BIOS takes control during system startup, one of the first things it does is run a Power-On Self-Test (POST) of key system components. During this testing, the BIOS attempts to interact with system components including the keyboard, video display, and boot device, typically a disk drive. Although the computer may contain a high-performance graphics processor, the video interface used by the BIOS during startup is normally a primitive video mode, supporting text display only.
The BIOS uses the video and keyboard interfaces to display any errors detected during system testing and allows the user to enter configuration mode and change stored settings. The keyboard and video interfaces provided by the BIOS enable the initial setup and configuration of a computer that does not yet contain a boot device.
When the video display is not working properly, the BIOS will be unable to present information related to the error. In this situation, the BIOS attempts to use the PC speaker to indicate the error, using a pattern of beeps. Motherboard documentation provides information about the type of error indicated by each beep pattern.
Depending on the system configuration, either the BIOS or the operating system manages the initialization of PCI devices during system startup. At the completion of a successful configuration process, all PCI devices have been assigned compatible I/O port ranges, memory-mapped I/O ranges, and interrupt numbers.
As startup proceeds, the operating system identifies the appropriate driver to associate with each peripheral based on manufacturer and device identification information provided through PCI/PCIe. Following successful association, the driver interacts directly with each peripheral to perform I/O operations upon request. System processes and user applications call a set of standardized driver functions to initiate access to the device, perform read and write operations, and close the device.
One common BIOS-related procedure is to select the boot order among the available storage devices. For example, this feature lets you configure the system to first attempt to boot from an optical disk containing a valid operating system image, if such a disk is in the drive. If no bootable optical disk is found, the system might then attempt to boot from the main disk drive. Several mass storage devices can be configured in priority order in this manner.
BIOS configuration mode is accessed by pressing a specific key, such as Esc or the F2 function key, during the early stage of the boot process. The appropriate key to press is usually indicated on screen during boot-up. Upon entering BIOS configuration mode, settings are displayed on screen in a menu format. You can select among different screens to modify parameters associated with features such as boot priority order. After making parameter changes, an option is provided to save the changes to nonvolatile memory (NVM) and resume the boot process. Be careful when doing this, because making inappropriate changes to the BIOS settings can leave the computer unbootable.
The capabilities of BIOS implementations have grown substantially over the years since the introduction of the IBM PC. As PC architectures grew to support 32-bit and then 64-bit operating systems, the legacy BIOS architecture, however, failed to keep pace with the needs of the newer, more capable systems. Major industry participants undertook an initiative to define a system firmware architecture that left behind the limitations of the BIOS. The result of this effort was the UEFI standard, which replaced the traditional BIOS capabilities in modern motherboards.
UEFI
UEFI is a 2007 standard defining an architecture for firmware that implements the functions provided by the legacy BIOS and adds several significant enhancements. As with BIOS, UEFI contains code executed immediately upon system startup.
UEFI supports a number of design goals, including enabling support for larger boot disk devices (specifically, disk sizes greater than 2 terabytes (TB), faster start up times, and improved security during the boot process. UEFI provides several features that, when enabled and used properly, substantially reduce the possibility of accidental or malicious corruption of firmware stored in UEFI flash memory.
In addition to the capabilities provided by legacy BIOS implementations described previously, the UEFI supports these features:
- UEFI applications are executable code modules stored in UEFI flash memory. UEFI applications provide extensions of capabilities available in the motherboard pre-boot environment and, in some cases, provide services for use by operating systems during runtime. One example of a UEFI application is the UEFI shell, which presents a command-line interface (CLI) for interacting with the processor and peripheral devices. The UEFI shell supports device data queries and permits modification of nonvolatile configuration parameters. The GNU GRand Unified Bootloader (GRUB) is another example of a UEFI application. GRUB supports multi-boot configurations by presenting a menu from which the user selects one of multiple available operating system images to boot during system startup.
- Architecture-independent device drivers provide processor-independent implementations of device drivers for use by UEFI. This enables a single implementation of UEFI firmware to be used on architectures as diverse as x86 and Advanced RISC Machine (ARM) processors. Architecture-independent UEFI drivers are stored in a byte-code format that is interpreted by processor-specific firmware. These drivers enable UEFI interaction with peripherals such as graphics cards and network interfaces during the boot process.
- Secure Boot employs cryptographic certificates to ensure that only legitimate device drivers and operating system loaders are executed during system startup. This feature validates the digital signature of each firmware component before allowing it to execute. This validation process protects against many classes of malicious firmware-based attacks.
- Faster booting is achieved by performing operations in parallel that took place sequentially under the BIOS. In fact, booting is so much faster that many UEFI implementations do not offer the user an option to press a key during boot because waiting for a response would delay system startup. Instead, operating systems such as Windows enable entry to UEFI settings by allowing the user to request access while the operating system is running, followed by a reboot to enter the UEFI configuration screen.
The UEFI does not simply replace the functions of the old BIOS. It is a miniature operating system that supports advanced capabilities, such as allowing a remotely located technician to use a network connection to troubleshoot a PC that refuses to boot.
Following POST and the low-level configuration of system devices, and having identified the appropriate boot device based on boot priority order, the system begins the operating system boot process.
The boot process
The procedure for booting a system image varies, depending on the partition style of the mass storage device containing the image. Beginning in the early 1980s, the standard disk partition format was called the master boot record (MBR). An MBR partition has a boot sector located at the logical beginning of its storage space. The MBR boot sector contains information describing the device's logical partitions. Each partition contains a filesystem organized as a tree structure of directories and the files within them.
Due to the fixed format of MBR data structures, an MBR storage device can contain a maximum of four logical partitions and can be no larger than 2 TB in size, equal to 232 512-byte data sectors. These limits have become increasingly constraining as commercially available disk sizes grew beyond 2 TB. To resolve these issues, and in tandem with the development of UEFI, a new partition format called GUID partition table (GPT) (where GUID stands for globally unique identifier) was developed to eliminate restrictions on disk size and the number of partitions, while providing some additional enhancements.
A GPT-formatted disk has a maximum size of 264 512-byte sectors, accommodating over 8 billion TB of data. As normally configured, GPT supports up to 128 partitions per drive. The type of each partition is indicated by a 128-bit GUID, allowing an effectively unlimited number of new partition types to be defined in the future. Most users do not need very many partitions on a single disk, so the most obvious user benefit of GPT is its support for larger drives.
The boot process takes place with some differences between BIOS and UEFI motherboards, as described in the following sections.
BIOS boot
Following POST and device configuration, BIOS begins the boot process. BIOS attempts to boot from the first device in the configured priority sequence. If a valid device is present, the firmware reads a small piece of executable code called the boot loader from the MBR boot sector and transfers control to it. At that point, the BIOS firmware has completed execution and is no longer active for the duration of system operation. The boot loader initiates the process of loading and starting the operating system.
If a boot manager is used with a BIOS motherboard, the MBR boot sector code must start the manager rather than loading an operating system directly. A boot manager (such as GRUB) presents a list from which the user selects the desired operating system image. The BIOS firmware itself has no knowledge of multi-booting, and the boot manager operating system selection process takes place without BIOS involvement.
Multi-booting versus boot priority order
Multi-booting allows the user to select the desired operating system from a menu of available choices. This differs from the boot priority list maintained by the BIOS, which empowers the BIOS itself to select the first available operating system image.
UEFI boot
After the POST and device configuration stages have completed (in a manner very similar to the corresponding BIOS steps), UEFI begins the boot process. In a UEFI motherboard, a boot manager may be displayed as part of the UEFI start up procedure. A UEFI boot manager, which is part of the UEFI firmware, presents a menu from which the user can select the desired operating system image.
If the user does not select an operating system from the boot manager within a few seconds (or if no boot manager menu is displayed), the UEFI attempts to boot from the first device in the configured priority sequence.
The UEFI firmware reads the boot manager executable code (which is separate from the UEFI boot manager) and boot loader files from configured locations on the system disk and executes these files during the start up process.
The following screenshot shows portions of the system boot configuration data (BCD) information stored on a Windows 10 system. To display this information on your computer, you must run the bcdedit command from a command prompt with Administrator privilege:
C:>bcdedit
Windows Boot Manager
--------------------
identifier {bootmgr}
device partition=DeviceHarddiskVolume1
path EFIMICROSOFTBOOTBOOTMGFW.EFI
…
Windows Boot Loader
-------------------
identifier {current}
device partition=C:
path WINDOWSsystem32winload.efi
…
In this example, the Windows Boot Manager is located at EFIMICROSOFTBOOTBOOTMGFW.EFI. This file is normally stored on a hidden disk partition and is not readily available for display in directory listings.
The Windows boot loader is identified as WINDOWSsystem32winload.efi and is located at C:WindowsSystem32winload.efi.
Unlike personal computers, most embedded devices use a much simpler boot process that does not involve BIOS or UEFI. The next section discussions the boot process in embedded devices.
Embedded devices
Most embedded systems, such as smartphones, do not generally have separate boot firmware such as the BIOS or UEFI in a PC. As we saw with the 6502, these devices perform a processor hardware reset when power is turned on and begin code execution at a specified address. All code in these devices is typically located in a nonvolatile storage region such as flash memory.
During startup, embedded devices perform a sequence of events similar to the PC boot process. Peripheral devices are tested for proper operation and initialized prior to first use. The boot loader in such devices may need to select among multiple memory partitions to identify an appropriate system image. As with UEFI, embedded devices often incorporate security features during the boot process to ensure that the boot loader and operating system image are authentic before allowing the boot process to proceed.
In both PC and embedded systems, startup of the boot loader is the first step in bringing up the operating system, which is the subject of the next section.
Operating systems
An operating system is a multilayer suite of software, providing an environment in which applications perform useful functions such as word processing, placing telephone calls, or managing the operation of a car engine. Applications running within the operating system execute algorithms implemented as processor instruction sequences and perform I/O interactions with peripheral devices as required to complete their tasks.
The operating system provides standardized programming interfaces that application developers use to access system resources such as processor execution threads, disk files, input from a keyboard or other peripherals, and output to devices such as a computer screen or instruments on a dashboard.
Operating systems can be broadly categorized into real-time and non-real-time systems.
A real-time operating system (RTOS) provides features to ensure that responses to inputs occur within a defined time limit. Processors performing tasks such as managing the operation of a car engine or a kitchen appliance typically run an RTOS to ensure that the electrical and mechanical components they control receive responses to any change in inputs within a bounded time.
Non-real-time operating systems do not attempt to ensure that responses are generated within any particular time limit. Instead, these systems attempt to perform the processing as quickly as possible, even if it sometimes takes a long time.
Real-time versus non-real-time operating systems
RTOSes are not necessarily faster than non-real-time operating systems. A non-real-time operating system may be faster on average compared to an RTOS, but the non-real-time system may occasionally exceed the time limit specified for the RTOS. The goal of the RTOS is to never exceed the response time limit.
For the most part, general-purpose operating systems such as Windows and Linux are non-real-time operating systems. They try to get assigned tasks—such as reading a file into a word processor or computing a spreadsheet—finished as quickly as possible, though the time to complete an operation may vary widely, depending on what other tasks the system is performing.
Some aspects of general-purpose operating systems, particularly audio and video output, have specific real-time requirements. We've all seen poor video replay at one time or another, in which the video stutters and appears jerky. This behavior is the result of failing to meet the real-time performance demands of video display. Cell phones have similar real-time requirements for supporting two-way audio during voice telephone calls.
For both real-time and non-real-time operating systems, in standard PCs as well as in embedded devices, operating system startup tends to follow a similar sequence of steps. The boot loader either loads the operating system kernel into memory or simply jumps to an address in NVM to begin executing operating system code.
The operating system kernel performs the following steps, not necessarily in this order:
- The processor and other system devices are configured. This includes setting up any required registers internal to the processor and any associated I/O management devices, such as a chipset.
- In systems using paged virtual memory (introduced in Chapter 7, Processor and Memory Architectures), the kernel configures the memory management unit.
- Base-level system processes, including the scheduler and the idle process, are started. The scheduler manages the sequence of execution for process threads. The idle process contains the code that executes when there are no other threads ready for the scheduler to run.
- Device drivers are enumerated and associated with each peripheral in the system. Initialization code is executed for each driver, as discussed earlier in this chapter.
- Interrupts are configured and enabled. Once interrupts have been enabled, the system begins to perform I/O interactions with peripheral devices.
- System services are started. These processes support non-operating system activities (such as networking) and persistent installed capabilities (such as a web server).
- For PC-type computers, a user interface process is started, which presents a login screen. This screen allows the user to initiate an interactive session with the computer. In embedded devices, the real-time application begins execution. The basic operational sequence for a simple embedded application is to read inputs from I/O devices, execute a computation algorithm to generate outputs, and write the outputs to I/O devices, repeating this procedure at fixed time intervals.
This section uses the term process to indicate a program running on a processor. The term thread indicates a flow of execution within a process, of which there may be more than one. The next section examines these topics in more detail.
Processes and threads
Many, but not all, operating systems support the concept of multiple threads of execution. A thread is a sequence of program instructions that logically executes in isolation from other threads. An operating system running on a single-core processor creates the illusion of multiple simultaneously running threads with time-slicing.
When performing time-slicing, an operating system scheduler grants each ready-to-run thread a period of time in which to execute. As a thread's execution interval ends, the scheduler interrupts the running thread and continues executing the next thread in its queue. In this manner, the scheduler gives each thread a bit of time to run before going back to the beginning of the list and starting over again.
In operating systems capable of supporting multiple runnable programs simultaneously, the term process refers to a running instance of a computer program. The system allocates resources such as memory and membership in the scheduler's queue of runnable threads to each process.
When a process first begins execution, it contains a single thread. The process may create more threads as it executes. Programmers create multithread applications for various reasons, including the following:
- One thread can perform I/O while a separate thread executes the main algorithm of the program. For example, a primary thread can periodically update a user display with received information while a separate thread waits in a blocked state for user input from the keyboard.
- Applications with substantial computational requirements can take advantage of multiprocessor and multi-core computer architectures by splitting large computational jobs into groups of smaller tasks capable of execution in parallel. By running each of these smaller tasks as a separate thread, programs enable the scheduler to assign threads to execute on multiple cores simultaneously.
A process passes through a series of states during its life cycle. Some process states assigned by operating systems are as follows:
- Initializing: When a process is first started, perhaps as the result of a user double-clicking an icon on the desktop, the operating system begins loading the program code into memory and assigning system resources for its use.
- Waiting: After process initialization has completed, it is ready to run. At this point, its thread is assigned to the scheduler's queue of runnable threads. The process remains in the Waiting state until the scheduler permits it to start running.
- Running: The thread executes the program instructions contained in its code section.
- Blocked: The thread enters this state when it requests I/O from a device that causes execution to pause. For example, reading data from a file normally causes blocking. In this state, the thread waits in the Blocked state for the device driver to finish processing the request. As soon as a running thread becomes blocked, the scheduler is free to switch to another runnable thread while the first thread's I/O operation is in progress. When the operation completes, the blocked thread returns to the Waiting state in the scheduler queue and eventually returns to the Running state, where it processes the results of the I/O operation.
Ready-to-run processes rely on the system scheduler to receive execution time. The scheduler process is responsible for granting execution time to all system and user threads.
The scheduler is an interrupt-driven routine that executes at periodic time intervals, as well as in response to actions taken by threads such as the initiation of an I/O operation. During operating system initialization, a periodic timer is attached to the scheduler interrupt handler, and the scheduler timer is started.
While each process is in the Initializing state, the kernel adds a data structure called a process control block (PCB) to its list of running processes. The PCB contains information that the system requires to maintain and interact with the process over its lifetime, including memory allocations and details regarding the file containing its executable code. A process is usually identified by an integer that remains unique during its lifetime. In Windows, the Resource Monitor tool (you can start this tool by typing Resource Monitor into the Windows search box and clicking on the result identified as Resource Monitor) displays running processes, including the process identifier (PID) associated with each process. In Linux, the top command displays the processes consuming the most system resources, identifying each by its PID.
The scheduler maintains information associated with each thread in a thread control block (TCB). Each process has a list of associated TCBs, with a minimum of one entry in the list. The TCB contains information related to the thread, including processor context. The processor context is the collection of information the kernel uses to resume execution of a blocked thread, consisting of these items:
- The saved processor registers
- The stack pointer
- The flags register
- The instruction pointer
Similar to the PID, each thread has an integer thread identifier that remains unique during its lifetime.
The scheduler uses one or more scheduling algorithms to ensure that execution time is allocated equitably among system and user processes. Two main categories of thread scheduling algorithms have been widely used since the early days of computing—non-preemptive and preemptive, described here:
- Non-preemptive scheduling grants a thread complete execution control, allowing it to run until it terminates, or voluntarily releases control to the scheduler so that other threads have a chance to run.
- In preemptive scheduling, the scheduler has the authority to stop a running thread and hand execution control over to another thread without requesting approval from the first thread. When a preemptive scheduler switches execution from one thread to another, it performs the following steps:
- Either a timer interrupt occurs that causes the scheduler to begin execution, or a running thread performs an action that causes blocking, such as initiating an I/O operation.
- The scheduler consults its list of runnable threads and determines which thread to place in the Running state.
- The scheduler copies the departing thread's processor registers into the context fields of the thread's TCB.
- The scheduler loads the context of the incoming thread into the processor registers.
- The scheduler resumes execution of the incoming thread by jumping to the instruction pointed to by the thread's program counter.
Thread scheduling occurs at a high frequency, which implies the code involved in scheduler activity must be as efficient as possible. In particular, storing and retrieving processor context takes some time, so operating system designers make every effort to optimize the performance of the scheduler's context switching code.
Because there may be numerous processes competing for execution time at a given moment, the scheduler must ensure that critical system processes are able to execute at required intervals. At the same time, from the user's point of view, applications must remain responsive to user inputs while providing an acceptable level of performance during lengthy computations.
Various algorithms have been developed over the years to efficiently manage these competing demands. A key feature of most thread scheduling algorithms is the use of process priorities. The next section introduces several priority-based thread scheduling algorithms.
Scheduling algorithms and process priority
Operating systems supporting multiple processes generally provide a prioritization mechanism to ensure that the most important system functions receive adequate processing time, even when the system is under heavy load, while continuing to provide adequate time for the execution of lower-priority user processes. Several algorithms have been developed to meet various performance goals for different types of operating systems. Some algorithms that have been popular over the years, beginning with the simplest, are as follows:
- First come, first served (FCFS): This non-preemptive approach was common in legacy batch processing operating systems. In an FCFS scheduling algorithm, each process is granted execution control and retains control until execution is completed. There is no prioritization of processes, and the time to complete any process is dependent on the execution time of processes preceding it in the input queue.
- Cooperative multithreading: Early versions of Windows and macOS used a non-preemptive multithreading architecture that relied on each thread to voluntarily relinquish control to the operating system at frequent intervals. This required significant effort by application developers to ensure a single application did not starve other applications of opportunities to execute by failing to release control at appropriate intervals. Each time the operating system received control, it selected the next thread to execute from a prioritized list of runnable threads.
- Round-robin scheduling: A preemptive round-robin scheduler maintains a list of runnable threads and grants each of them an execution interval in turn, starting over at the beginning of the list upon reaching the end. This approach effectively sets all process priorities equally, giving each a chance to execute for defined periods of time, at time intervals dependent on the number of processes in the scheduler's list.
- Fixed-priority preemptive scheduling: In this algorithm, each thread is assigned a fixed priority value indicating the importance of its receiving execution control when it is in the Waiting state. When a thread enters the Waiting state, if it has a higher priority than the currently running thread, the scheduler immediately stops the running thread and turns control over to the incoming thread. The scheduler maintains the list of Waiting processes in priority order, with the highest priority threads at the head of the line. This algorithm can result in the failure of lower-priority threads to get any execution time at all if higher-priority threads monopolize the available execution time.
- Rate-monotonic scheduling (RMS) is a fixed-priority preemptive scheduling algorithm commonly used in real-time systems with hard deadlines (a hard deadline is one that cannot be missed). Under RMS, threads that execute more frequently are assigned higher priorities. As long as a few criteria are satisfied (the thread execution interval equals the deadline; there can be no delay-inducing interactions between threads; and context switch time is negligible), if the maximum possible execution time of each thread is below a mathematically derived limit, deadlines are guaranteed to be met.
- Fair scheduling: Fair scheduling attempts to maximize the utilization of processor time while ensuring that each user is granted an equal amount of execution time. Rather than assigning numeric priorities to threads, the effective priority of each thread is determined by the amount of execution time it has consumed. As a thread uses more and more processor time, its priority declines, enabling other threads more opportunities to run. This approach has the benefit that, for interactive users who do not consume much execution time, the responsiveness of the system is improved. The Linux kernel uses a fair scheduling algorithm as its default scheduler.
- Multilevel feedback queue: This algorithm uses multiple queues, each with a different priority level. New threads are added at the tail of the highest-priority queue. At each scheduling interval, the scheduler grants execution to the thread at the head of the high-priority queue and removes the thread from the queue, which moves the remaining threads closer to execution. Eventually, the newly created thread receives an opportunity to execute. If the thread consumes all the execution time granted to it, it is preempted at the completion of its interval and added to the tail of the next lower-priority queue. The Windows Scheduler is a multilevel feedback queue.
The system idle process contains the thread that executes when there is no user- or system-assigned thread in the Waiting state. An idle process may be as simple as a single instruction that forms an infinite loop, jumping to itself. Some operating systems place the system in a power-saving mode during idle periods, rather than executing an idle loop.
The percentage of processor time consumed by running processes is computed by determining the fraction of time the system was executing a non-idle thread over a measurement period.
The following screenshot is a Windows Resource Monitor view of running processes consuming the highest average share of processor time:

Figure 5.1: Windows Resource Monitor process display
In this figure, the PID column displays the numeric process identifier, and the Threads column shows the number of threads in the process. The process state is Running for all of the processes visible in this display.
The following screenshot shows the result of running the top command on a Linux system:
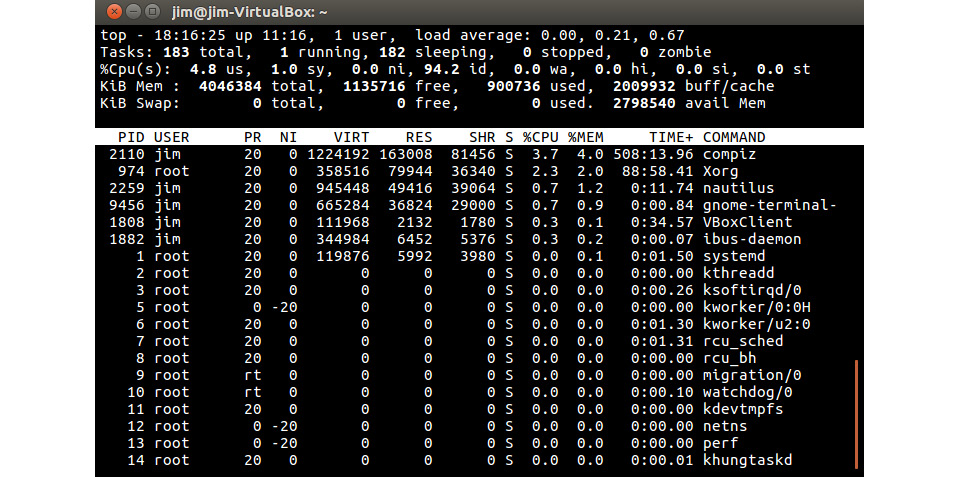
Figure 5.2: Linux top command process display
The upper part of the display contains summary information, including the number of processes (referred to as Tasks here) in each state.
Each row in the lower part of the display presents information about one running process. As in Windows, the PID column indicates the PID. The state of each process is shown in the S column, with these possible values:
- R: Runnable, meaning either running or in the queue of ready-to-run threads.
- S: Sleeping: Paused while blocked; waiting for an event to complete.
- T: Stopped in response to a job control command (pressing CTRL+Z will do this).
- Z: Zombie, which occurs when a child process of another process terminates, but the child process information continues to be maintained by the system until the parent process ends.
- PR: The PR column displays the scheduling priority of the process. Smaller numbers represent higher priorities.
Up to this point, we have referred to the computer processor as a singular entity. In most modern PCs, the processor integrated circuit contains two or more processor cores, each implementing the features of a complete, independent processor, including a control unit, register set, and arithmetic logic unit (ALU). The next section discusses the attributes of systems containing multiple processing units.
Multiprocessing
A multiprocessing computer contains two or more processors that simultaneously execute sequences of instructions. The processors in such a system typically share access to system resources, such as main memory and peripheral devices. The processors in a multiprocessing system may be of the same architecture, or individual processors may be of differing architectures to support unique system requirements. Systems in which all processors are treated as equal are referred to as symmetric multiprocessing systems. Devices that contain multiple processors within a single integrated circuit are called multi-core processors.
At the level of the operating system scheduler, a symmetric multiprocessing environment simply provides more processors for use in thread scheduling. In such systems, the scheduler treats additional processors as resources when assigning threads for execution.
In a well-designed symmetric multiprocessing system, throughput can approach the ideal of scaling linearly with the number of available processor cores, as long as contention for shared resources is minimal. If multiple threads on separate cores attempt to perform heavy simultaneous access to main memory, for example, there will be inevitable performance degradation as the system arbitrates access to the resource and shares it among competing threads. A multichannel interface to dynamic random-access memory (DRAM) can improve system performance in this scenario.
A symmetric multiprocessing system is an example of a multiple instruction, multiple data (MIMD) architecture. MIMD is a parallel processing configuration in which each processor core executes an independent sequence of instructions on its own set of data. A single instruction, multiple data (SIMD) parallel processing configuration, on the other hand, performs the same instruction operation on multiple data elements simultaneously.
Modern processors implement SIMD instructions to perform parallel processing on large datasets such as graphical images and audio data sequences. In current-generation PCs, the use of multi-core processors enables MIMD execution parallelism, while specialized instructions within the processors provide a degree of SIMD execution parallelism. SIMD processing will be discussed further in Chapter 8, Performance-Enhancing Techniques.
Processor clock speeds have grown from the 4.77 MHz of the original PC to over 4 GHz in modern processors, nearly a thousand-fold increase. Future speed increases are likely to be more limited as fundamental physical limits present looming obstacles. To compensate for limited future performance gains from increases in clock speed, the processor industry has turned to emphasizing various forms of execution parallelism in personal computer systems and smart devices. Future trends are likely to continue the growth in parallelism as systems integrate dozens, then hundreds, and eventually thousands of processor cores executing in parallel in PCs, smartphones, and other digital devices.
Summary
This chapter began with an overview of device drivers, including details on the instruction sequences used by driver code to read from and write to a simple I/O device, the PC parallel port. We continued with a discussion of the legacy BIOS and the newer UEFI, which provide the code that first executes on PC power-up, performs device testing and initialization, and initiates loading of the operating system.
We continued with a description of some of the fundamental elements of operating systems, including processes, threads, and the scheduler. Various scheduling algorithms used in past computers and the systems of today were introduced. We examined the output of tools available in Windows and Linux that present information about running processes.
The chapter concluded with a discussion of multiprocessing and its performance impact on the computer systems of today, as well as the implications of MIMD and SIMD parallel processing for the future of computing.
The next chapter will introduce specialized computing domains and their unique processing requirements in the areas of real-time computing, digital signal processing, and graphics processing unit (GPU) processing.
Exercises
- Restart your computer and enter the BIOS or UEFI settings. Examine each of the menus available in this environment. Does your computer have BIOS or does it use UEFI? Does your motherboard support overclocking? When you are finished, be sure to select the option to quit without saving changes unless you are absolutely certain you want to make changes.
- Run the appropriate command on your computer to display the currently running processes. What is the PID of the process you are using to run this command?