Chapter 4: Computer System Components
This chapter begins with an introduction to the metal-oxide-semiconductor (MOS) transistor, used extensively in memory circuits and in most other modern digital devices. We then examine the design of computer memory circuits based on MOS transistors and their interface to the processor. We'll look at modern computer input/output interfaces, with a focus on the use of high-speed serial communication within the computer's case, as well as over cable connections to external peripherals. The functional requirements of system I/O devices including the graphics display, network interface, keyboard, and mouse will be discussed. The chapter ends with a descriptive example of the specifications for a modern computer motherboard.
After completing this chapter, you will have a solid understanding of the hardware components of modern computer systems, from the technical specifications down to the circuit level. You will have learned how system memory is implemented, including the basics of caching. You will understand the mechanisms of efficient I/O operations, and how USB is used to connect the keyboard, mouse, and other I/O devices. You will understand the computer's network interface and will have become familiar with several examples of modern computer system architectures.
The following topics will be covered in this chapter:
- Memory subsystem
- Introducing the MOSFET
- Constructing DRAM circuits with MOSFETs
- Input/output subsystem
- Graphics display interfaces
- Network interface
- Keyboard and mouse
- Modern computer system specifications
Technical requirements
Files for this chapter, including answers to the exercises, are available at https://github.com/PacktPublishing/Modern-Computer-Architecture-and-Organization.
Memory subsystem
The Babbage Analytical Engine's design employed a collection of axes, each holding 40 decimal digit wheels, as the mechanism for storing data during computations. Reading data from an axis was a destructive operation, resulting in zeros on all of an axis's wheels after the read had completed.
From the 1950s to the 1970s, the preferred technology for digital computer memory was the magnetic core. One bit of core memory is stored in a small toroidal (donut-shaped) ceramic magnet. The cores making up a memory array are arranged in a rectangular grid with horizontal and vertical connecting wires. Writing to a bit location involves producing enough current in the wires connected to the bit location to flip the polarity of the core's magnetic field. A 0 bit might be defined as clockwise magnetic flux circulation within the core and a 1 bit as counterclockwise flux circulation.
Reading a bit from core memory consists of attempting to set the bit to the 0 polarity and observing the response. If the selected core already contains a 0 bit, there will be no response. If the core holds a 1, a detectable voltage pulse occurs as the polarity changes. As in the Analytical Engine, a core memory read operation is destructive. After reading a word of memory, an immediate write must be performed to restore the state of the bits.
Magnetic core memory is non-volatile: the contents continue to be retained indefinitely without power. It also has characteristics that make it valuable in applications such as spacecraft where radiation tolerance is important. The Space Shuttle computers employed core memory into the late 1980s.
Modern consumer and business computer systems use MOSFET-based DRAM circuits almost exclusively for main system memory. The next section describes the features of the MOSFET.
Introducing the MOSFET
Chapter 2, Digital Logic, introduced the NPN transistor, a type of bipolar junction transistor (BJT). The NPN transistor is called bipolar because it relies on both positive and negative charge carriers to function.
In semiconductors, electrons serve as the negative charge carriers. There are no physical particles with positive charge involved in a semiconductor operation; rather, the absence of a normally present electron in an atom exhibits the same properties as a positively charged particle. These missing electrons are referred to as holes. Holes function as the positive charge carriers in bipolar junction transistors.
The concept of holes is so fundamental to semiconductor operation that William Shockley, one of the inventors of the transistor, wrote a book entitled Electrons and Holes in Semiconductors, published in 1950. We'll next examine the behavior of positive and negative charge carriers in unipolar transistors.
As an alternative to the BJT transistor structure, the unipolar transistor relies on only one of the two types of charge carriers. The metal-oxide-semiconductor field-effect transistor (MOSFET) is a unipolar transistor suitable for use as a digital switching element. Like the NPN transistor, the MOSFET is a three-terminal device employing a control input that turns the flow of current across the other two terminals on and off. The following figure is the schematic representation of an n-channel enhancement mode MOSFET:

Figure 4.1: N-channel enhancement mode MOSFET
For our purposes, the n-channel enhancement mode MOSFET functions as a switch: When the gate terminal voltage is low (below a threshold voltage), there is very high resistance between the drain and source terminals. When the gate terminal voltage is high (above a threshold voltage), there is very low resistance between those terminals. The "n" in n-channel refers to a channel in the silicon doped to produce an increased number of electrons (negative charge carriers).
This behavior is similar to the operation of the NPN transistor discussed in Chapter 2, Digital Logic. There is, however, a key difference: the MOSFET is a voltage-controlled device, while the NPN transistor is a current-controlled device. The base terminal of the NPN transistor requires a small but steady current to activate the device as a switch, allowing current to flow between the emitter and collector terminals. The MOSFET, on the other hand, requires only a voltage level above a threshold on the gate terminal to switch the current flow on between the drain and source terminals. The gate input requires almost no current flow to keep the switch open. Because of this, a MOSFET consumes significantly less power than an NPN transistor performing the equivalent digital function.
Mohamed Atalla and Dawon Kahng invented the MOSFET at Bell Telephone Laboratories in 1959. It was not until the early 1970s that production processes had matured sufficiently to support the reliable production of MOS integrated circuits. Since then, the MOSFET has been by far the most common type of transistor used in integrated circuits. As of 2018, it is estimated that 13 sextillion (a sextillion is one followed by 21 zeros) transistors had been manufactured, 99.9 percent of which were MOS transistors. The MOSFET is the most frequently manufactured device in human history.
The p-channel enhancement mode MOSFET is similar to the n-channel enhancement mode MOSFET, except it exhibits the opposite response to the gate terminal: a low voltage on the gate allows current to flow between the drain and source, while a high voltage on the gate inhibits current between the drain and source. The "p" in p-channel refers to channel doping that increases the number of holes (positive charge carriers). The following figure is the schematic diagram of a p-channel enhancement mode MOSFET:

Figure 4.2: P-channel enhancement mode MOSFET
In the schematic representations of both the n-channel and p-channel MOSFETs, the source terminal is connected to the center of the three internal connections. The directional arrow on this connection points toward the gate for an n-channel MOSFET and away from the gate for a p-channel MOSFET.
MOS transistors are most commonly employed in n-channel and p-channel pairs to perform logic functions. A device built from these pairs of MOS transistors is called a complementary MOS (CMOS) integrated circuit. Except when switching is taking place, CMOS circuits consume almost no power because the gate input requires essentially no current. Chih-Tang Sah and Frank Wanlass of Fairchild Semiconductor developed the CMOS configuration in 1963.
The following diagram presents a NOT gate circuit with the NPN transistor replaced by a complementary pair of MOSFETs:

Figure 4.3: CMOS NOT gate circuit
When the Input signal is low (near 0V), the lower n-channel MOSFET is switched off and the upper p-channel MOSFET is switched on. This connects the Output to the positive side of the voltage source, raising the Output signal to nearly 5V. When Input is high, the upper MOSFET is switched off and the lower MOSFET is switched on, pulling the Output to nearly 0V. The Output signal is always the inverse of the Input signal, which is the definition of NOT gate behavior.
Today, virtually all high-density digital integrated circuits are based on CMOS technology. In addition to performing logic functions, the MOSFET is a key component of modern random-access memory circuit designs. The next section discusses the use of the MOSFET in memory circuits.
Constructing DRAM circuits with MOSFETs
A single bit in a standard dynamic random-access memory (DRAM) integrated circuit is composed of two circuit elements: a MOSFET and a capacitor. The following section provides a brief introduction to the electrical characteristics of capacitors.
The capacitor
A capacitor is a two-terminal passive circuit element capable of storing energy. Energy enters and leaves a capacitor as electrical current. The voltage across the capacitor terminals is proportional to the quantity of electrical energy contained in the capacitor.
To continue the hydraulic system analogy introduced in Chapter 2, Digital Logic, think of a capacitor as a balloon attached to the side of the pipe leading to a water tap. Water pressure in the pipe causes the balloon to inflate, filling it with some of the water from the pipe. Let's assume this is a strong balloon, and that as it inflates, the balloon stretches, increasing the pressure inside the balloon. The balloon inflates until the pressure in the balloon equals the pressure in the pipe, and then stops filling.
If you open the tap at the end of the pipe all the way, the release of water causes the pressure in the pipe to decrease. Some of the water in the balloon will flow back into the pipe, until the balloon pressure again equals the pipe pressure.
Hydraulic devices called water hammer arrestors function in exactly this manner to solve the problem of pipes that make banging noises when water taps are turned on and off. A water hammer arrestor uses balloon-stretching-like behavior to smooth out the abrupt changes in water pressure that result from taps opening and closing.
The quantity of electrical energy contained in a capacitor is analogous to the amount of water in the balloon. The voltage across the capacitor is analogous to the pressure inside the balloon exerted by stretching.
An electrical capacitor can be constructed from two parallel metal plates separated by an insulating material, such as air. One terminal is connected to each of the plates. The ratio of the quantity of stored electrical energy to the voltage across the capacitor is called capacitance, and it depends on the size of the parallel plates, the distance separating them, and the type of material used as the insulator between them. The capacitance of a capacitor is analogous to the size of the balloon in the hydraulic example. A capacitor with a larger capacitance corresponds to a larger balloon. A large balloon requires more water to fill to a given pressure than a smaller balloon. The schematic symbol for a capacitor is shown here:

Figure 4.4: Capacitor schematic symbol
The two horizontal lines with space between them represent the metal plate capacitor architecture described in the preceding section. The unit of capacitance is the farad, named after the English scientist Michael Faraday.
The DRAM bit cell
A DRAM bit cell is a readable and writeable storage location for a single bit of data. The DRAM modules used in modern computers contain billions of these bit cells. A single bit in a DRAM circuit consists of a MOSFET and a capacitor, arranged as follows:
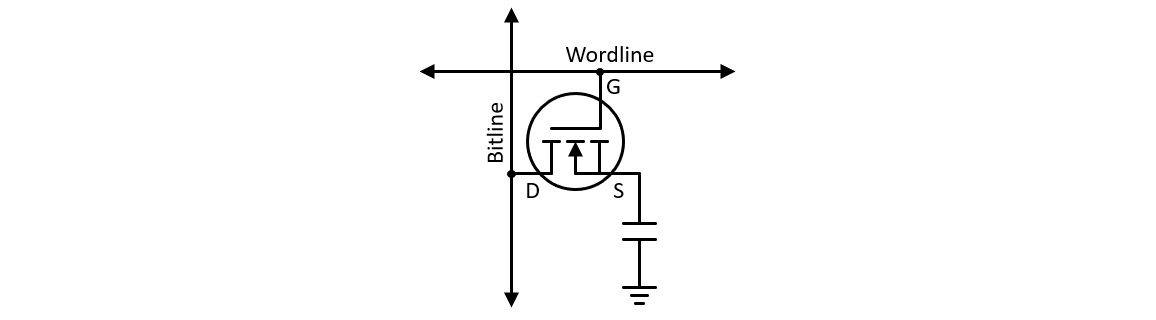
Figure 4.5: DRAM bit cell circuit
In this figure, the symbol with three horizontal lines at the bottom right is the ground symbol, which is an alternative to the 0V designation used in earlier figures such as Figure 4.3.
This single-bit cell must be replicated in a rectangular grid to form a complete DRAM memory bank. The following figure shows the configuration of a 16-bit DRAM bank consisting of 4 words with 4 bits in each word:

Figure 4.6: DRAM memory bank organization
Of course, real DRAM banks contain a much larger number of bits than the simple circuit in this diagram. Typical DRAM devices have a word size of 8 bits (rather than the four bits labeled B0-B3 in the figure). This means each DRAM chip can store or retrieve 8 bits in parallel.
The number of instances of bit cells along a wordline in an actual DRAM bank array is an integer multiple of the device word size. The large DRAM modules used in personal computers contain many words along each wordline. A DRAM chip implemented with 8-bit words and 1,024 words per row contains 8,192 bits per row, with all of the MOSFET gate terminals along the row controlled by a single wordline signal. These devices include additional multiplexer logic to select the specific word the processor is requesting from the numerous words in the row selected by the active wordline.
The vertical dimension of the DRAM bank consists of replicated copies of cell rows with one wordline controlling each row. The wordline connects all the bit cells horizontally while the bitline signals connect the cells in all of the rows vertically.
The state of each memory bit is stored in the cell's capacitor. A low voltage on the capacitor represents a 0 bit while a high voltage represents a 1 bit. In the context of real-world DRAM devices, low voltage is near 0V and high is typically near 1.2V.
The wordline for each row is held low most of the time. This keeps the MOSFET turned off, maintaining the capacitor state. When it is time to read a word (actually, an entire row) of DRAM memory, addressing circuitry selects the appropriate wordline and drives it high while keeping all the other wordlines in the bank low. This turns on the MOSFET in each bit cell along the active wordline, allowing the cell capacitors to drive their voltages onto the connected bitlines. Bitlines for cells at the 1 (high) voltage level will have higher voltages than cells at the 0 (low) voltage level. The bitline voltages are sensed by circuitry in the DRAM device and latched into the chip's output register.
Writing to a DRAM word begins by setting the selected wordline high in the same manner as reading a word. Instead of sensing the voltage on the bitlines, the DRAM device drives each bitline with the voltage to be written to each cell, either 0V or 1.2V, depending on whether the data bit is a 0 or a 1. As with filling or emptying a balloon, it takes a bit of time for each capacitor to charge or discharge to the voltage presented on its bitline. After this delay has transpired, the wordline is driven low to turn the MOSFETs off and lock the capacitors at their new charge levels.
DRAM circuit technology is complicated by the fact that capacitors leak. After charging a capacitor to a non-zero voltage, the charge will bleed off over time, reducing the quantity of stored charge and the voltage across the capacitor. Because of this, the contents of each cell must be refreshed periodically.
A refresh operation consists of reading each cell value and writing it back to the cell. This recharges the capacitor to its "full" voltage level, if it is a 1, or drives it to near 0V if it is a 0. A typical refresh interval for modern DRAM devices is 64 ms. DRAM refresh proceeds continuously, row by row, in the background during system operation and synchronizes with processor access to memory to avoid conflicts.
While the need for periodic refreshing significantly complicates the design of systems using DRAM devices, the benefit of storing a bit with just one transistor and one capacitor is so immense that DRAM has supplanted all alternatives as the preferred technology for main memory in consumer and business computer systems.
DDR4 SDRAM
Intel produced the first commercial DRAM integrated circuit in 1970. The Intel 1103 held 1,024 bits of data with a word size of 1 bit. The 1103 had to be refreshed every 2 ms. By the early 1970s, MOS semiconductor DRAM overtook magnetic core memory as the preferred memory technology in computer systems. DRAM is volatile, meaning when power is removed, the charge in the bit cell capacitors dissipates and the data content is lost. The current generation of DRAM technology in widespread use is DDR4 SDRAM.
Modern personal computers and personal devices such as smartphones generally contain multiple gigabytes (GB) of RAM. One GB is 230 bytes, equivalent to 1,073,741,824 (just over one billion) bytes. As the name implies, random access memory allows the processor to read or write any memory location within the RAM address space in a single operation. As of 2019, a high-end memory module available for use in laptop computers contains 32 GB of DRAM distributed across 16 integrated circuits. Each DRAM chip in this module contains 2 gigawords, with a word length of 8 bits.
As of 2019, the leading memory module standard is DDR4 SDRAM, an evolutionary optimization of DRAM interface technologies built upon the DDR1, DDR2, and DDR3 generations. A DDR4 memory module is packaged as a dual inline memory module (DIMM). A DIMM has electrical contacts on both sides of the circuit board edge (hence the term dual in the name), providing connectivity to the DIMM socket in the motherboard. A standard DDR4 DIMM has 268 pins. A smaller module format called the small outline DIMM (SODIMM) is available for systems such as laptops where space is at a premium. A DDR4 SODIMM has 260 pins. Because of the reduced number of pins, SODIMM modules lack features that some DIMMs support, such as the ability to detect and correct bit errors in data retrieved from the device.
The term double data rate DDR refers to the transfer timing characteristics between a memory module and the processor memory controller. The original single data rate (SDR) DRAM performed one data transfer per memory clock cycle. DDR memory devices perform two transfers per clock cycle: one on the clock rising edge and one on the falling edge. The number following "DDR" identifies the generation of DDR technology. DDR4, therefore, is the fourth generation of the DDR standard. The term synchronous DRAM (SDRAM) indicates the DRAM circuitry is synchronized with the processor memory controller through a shared clock signal.
DDR4 memory modules are nominally powered by 1.2V and use a 2.5V auxiliary voltage input to provide a "boost" for the wordline signal. As a representative example, a particular DDR4 module can perform up to 3.2 billion data transfers per second, double the memory clock speed of 1600 MHz. At 8 bytes per transfer, this DDR4 device can move 25.6 GB per second. DDR4 modules are available in a variety of clock speeds, memory sizes, and price points.
Although real-world DRAM modules implement rectangular banks of single-bit cells as described in the previous section, the internal architecture of a DDR4 device is somewhat more complex. A DRAM integrated circuit generally contains multiple banks. The addressing logic selects the bank containing the desired memory location before performing a read or write operation. In DDR4 modules, banks are further arranged into bank groups, necessitating additional addressing logic to choose the correct group. A DDR4 device contains four bank groups, each with four banks. The reason for partitioning the DDR4 memory module architecture into multiple bank groups is to maximize data transfer speed by enabling multiple simultaneous, overlapped memory access operations to proceed in parallel. This allows data transfer between processor and RAM to flow at peak speed while minimizing the need to wait for each internal DRAM bank access operation to complete.
In addition to specifying the correct address location within a DDR4 memory module, the system must provide a command via interface signals to indicate the action to be taken, specifically, whether to read from, write to, or refresh the selected row.
The DDR4 SDRAM standard, available for purchase from the Joint Electron Device Engineering Council (JEDEC) at https://www.jedec.org/standards-documents/docs/jesd79-4a, provides the detailed definition of the DDR4 memory interface to host computer systems. This standard contains all the information needed to design memory modules compatible with any computer system supporting DDR4.
Historically, each numerical generation of the DDR SDRAM standards has been incompatible with previous generations. A motherboard built for DDR4 memory modules will only work with DDR4 modules. The slot for each DDR generation is constructed in such a way that it is not possible to insert an incorrect module. For example, a DDR3 DRAM module will not fit into a DDR4 slot.
As memory technologies evolve, the primary improvements in each new generation are increased data transfer rate and greater memory density. To assist in achieving these goals, power supply voltages have decreased in later generations, reducing system power consumption and enabling denser memory circuitry without excessive heating.
Most modern processors view system memory as a linear array of sequential addresses. In less sophisticated processor architectures, such as the 6502, the processor directly addresses RAM chips using addresses provided in instructions. Because of the complexity of the control signals and bank management logic in DDR4 SDRAM devices, modern computer systems must provide a memory controller to translate each linear processor address into command and addressing signals selecting the appropriate DDR4 module (in a system with multiple memory modules), bank group, bank, and row/column location within the selected bank. The memory controller is a sequential logic device that manages the details of communication between the processor and DRAM memory modules. To achieve peak system performance, the memory controller must intelligently exploit the capability for overlapped operations provided by DDR4 memory modules.
Sophisticated modern processors generally integrate the memory controller function into the processor integrated circuit itself. It is also possible to design a system with a separate memory controller that sits between the processor and RAM.
A memory controller interface may contain multiple channels, where each channel is a separate communication path between the processor and one or more memory modules. The benefit of providing multiple channels in a memory architecture is that it is possible to perform memory accesses over each channel in parallel.
A system containing multiple memory channels does not achieve an automatic increase in memory access speed, however. System software must actively manage the assignment of memory regions to each application or system process to balance memory usage access across channels. If the operating system were to simply assign processes to physical memory regions sequentially, filling one memory module first then moving to the next, there would be no benefit from multi-channel memory when all processes are forced to use the same memory channel.
DDR5
The next-generation DDR5 standard is in development and is scheduled for release in 2020. DDR5 is planned to double the bandwidth of DDR4 while further reducing power consumption by operating at 1.1V.
Graphics DDR
Graphics DDR (GDDR) is a DDR memory technology optimized for use as video RAM in graphics cards. GDDR has a wider memory bus to support the high-throughput requirements of video display. Standard DDR memory, on the other hand, is optimized to provide minimum latency access to data. Note that the generation numbers for GDDR and DDR are not aligned. As of 2019, GDDR5 modules have been available for several years, while the DDR5 standard remains in development.
Prefetching
One DRAM performance attribute that improves very little from one generation to the next is the speed of reading from or writing to an individual bit location in DRAM. To achieve an increase in the average data transfer rate into and out of DRAM modules, the devices must employ other techniques to improve performance. One technique for achieving faster average data transfer speeds is prefetching.
The idea behind prefetching is to exploit the fact that whenever a particular memory location is being accessed by a processor, it is likely that access will soon be needed to a location close to the first location. Prefetching consists of reading a larger block of memory than the single location a processor instruction references and passing the entire block from the DRAM device to the processor. In the context of a DDR4 memory module, the block size is normally 64 bytes.
The DDR4 module can read 64 bytes quickly because it accesses all 512 bits of those 64 bytes simultaneously. In other words, the DDR4 module reads an integer multiple of 512 bitlines from the cells selected by a wordline. The bits of the selected row are read simultaneously, then pass through a multiplexer to select the desired 512 bits from the perhaps 8,192 bits in the entire row, which are then latched into an output register. The latched bits transfer from the DRAM module to the processor using DDR clocking. With the effective use of multiple bank groups, multiple reads of memory and transfers of the resulting data can overlap in time and ensure the data moves between the memory module and the processor at the highest rate the interface can support.
Upon receiving the 64-byte block, the processor stores the data in internal cache memory and selects the specific data element (perhaps as small as one byte) from the block requested by the executing instruction. If a subsequent instruction accesses different data contained in the same block, the processor only needs to consult its local cache, resulting in much faster execution than the instruction that originally retrieved the data block from DRAM.
In addition to interacting with main memory, the processor must communicate with the outside world through input and output devices. The next section discusses the implementation of I/O interfaces in modern computer systems.
I/O subsystem
Chapter 3, Processor Elements, introduced two broad categories of I/O architecture: memory-mapped I/O and port-mapped I/O. The pros and cons of each of these approaches were significant in the early days of PCs when the number of physical address lines limited the total processor memory space to a 1 MB range. Modern processor architectures are capable of addressing a far larger memory range, typically in the tens of gigabytes. A consequence of this address space expansion is the ready availability of address regions for use in I/O interfaces. Modern 32-bit and 64-bit general-purpose processors employ memory-mapped I/O for most of their interface requirements.
Sophisticated modern processors usually implement a memory controller within the processor chip, interfacing directly with DDR memory modules. Most other I/O performed by these processors is offloaded to one or more external integrated circuits, typically referred to as a chipset. The term chipset is commonly used even when only one chip is needed to implement the I/O functions.
The chipset provides interfaces to a wide range of peripherals, such as graphics cards, disk drives, network interface, the keyboard, the mouse, and many others via USB. Most of these interfaces are implemented using one form or another of a serial bus. The following sections introduce the most common I/O technologies used in modern computers.
Parallel and serial data buses
A parallel data bus communicates multiple data bits simultaneously across separate conductors between two or more communication endpoints. Early PCs employed parallel buses for such functions as connecting a printer to the computer. Over time, several limitations of parallel buses became evident:
- Depending how many bits the bus supports, a parallel bus connection may need a lot of wires, which means cables are more expensive, and there is a greater possibility of problems when cable wires break, or connectors have dirty contacts.
- As computer system developers made efforts to increase performance (and thereby gain a competitive edge), another limitation of parallel buses became significant: even though the device transmitting a data word on the bus may output all of the parallel bits essentially simultaneously, the signals may not arrive at the destination at the same time. This could be caused by differences in the path length of the conductors in the cable or across the circuit board. Because of this, there is an upper limit on the data transfer rate a parallel bus can support.
- Another limitation of parallel buses is they can only transfer data in one direction at a time (referred to as half-duplex) unless a duplicate set of connections is available for simultaneously transferring data in the opposite direction. Parallel buses usually do not provide simultaneous bi-directional communication capability, referred to as full-duplex operation.
A serial data bus transfers data between two communication endpoints a single bit at a time using a pair of conductors. Most of the high-speed communication paths between the processor and peripheral devices in modern computers use some form of serial bus. While at first blush, switching from a parallel bus architecture to a serial bus seems to represent a substantial loss in throughput capability, serial buses exhibit several important advantages that make their use attractive in performance-critical applications.
High-speed serial buses in personal and business computer systems communicate over pairs of conductors using differential signaling. Differential signaling uses two conductors, carefully matched to be of the same length and to exhibit nearly identical electrical characteristics. When used in cables, these conductors are insulated wires twisted around each other to form twisted pairs.
The following figure represents a serial data bus using differential signaling:

Figure 4.7: Serial bus circuit using differential signaling
The digital signal to be transmitted arrives at the transmitter (labeled Tx) via the input at the left edge of the figure. The input is transformed into a pair of voltages on the two parallel lines crossing the center of the diagram. The small circle indicates that the transmitter top signal is inverted relative to the bottom signal.
In a typical serial circuit, a high signal level at the transmitter input will generate a voltage of 1.0V on the top serial conductor and 1.4V on the bottom conductor. A low signal input produces 1.4V on the top conductor and 1.0V on the bottom conductor. The inputs to the receiver (labeled Rx) are high impedance, meaning the receiver draws a negligible amount of current from the circuit. The receiver measures the voltage across the resistor (which has a typical value of 100 Ω), with the upper resistor terminal at -0.4V relative to the lower terminal when the Tx input is high. When the Tx input is low, the upper resistor terminal is +0.4V relative to the lower terminal.
The receiver generates its output by inverting one of the inputs (the top one, with the small circle) and adding the resulting voltage to the other input. In other words, the receiver only measures the difference between the voltages on the two conductors. The primary benefit of this approach derives from the fact that most forms of corrupting interference cause voltage variations in the conductors carrying the signal. By placing the two conductors very close together, most of the noise voltage introduced on one of the conductors will also appear on the other conductor. The subtraction operation cancels out a large portion of the noise that would otherwise interfere with the accurate detection of the signal by the receiver.
A serial data bus can perform several billion bit transfers per second, far more than the old PC's parallel bus. It is possible to run several serial buses alongside each other, effectively multiplying the data transfer bandwidth by the number of buses. A crucial difference between multiple serial buses connecting two endpoints and a parallel bus making the same connection is that, for some interface standards, the serial buses are all operating somewhat independently. They do not synchronize at the level of each bit transfer as all the bits in a parallel bus must. This makes it easier to design interconnections capable of supporting very high data rates while only needing to worry about precisely matching the length and electrical characteristics within each pair of serial conductors.
The connection between a modern processor and its motherboard chipset generally consists of several serial data buses called High-Speed Input Output (HSIO) lanes. Each lane is a serial connection with one data path like Figure 4.7 flowing in each direction, supporting full-duplex operation. Individual lanes can be assigned to specific types of peripheral interfaces that are also implemented as serial connections, such as PCI Express, SATA, and USB. The following sections will examine each of these interfaces.
PCI Express
The original Peripheral Component Interconnect (PCI) bus was a 32-bit parallel bus used in PC-compatible computers from about 1995 through 2005. The PCI slots on computer motherboards accepted a wide variety of expansion cards performing functions such as networking, video display, and audio output. By the early 2000s, the limitations of the parallel bus architecture had become apparent and development began on a serial bus replacement for PCI named PCI Express.
PCI Express, abbreviated to PCIe, is a bi-directional differential signaling serial bus used primarily to connect communication endpoints on computer motherboards. PCIe performance is expressed in billions of transfers per second, or GT/s. One "transfer" is a single bit propagated across the bus from transmitter to receiver. PCIe inserts additional bit periods in each communication to ensure data integrity. Different generations of PCIe have varying amounts of these overhead bits, influencing the effective data transfer rate. The following table shows the major generations of PCIe, the year each was introduced, the single-lane transfer rate in GT/S, and the effective data transfer rate in MB/s.
Table 4.1: PCI Express generations

The effective data rate presented here is for one-way communication, though PCIe supports full-speed data transfer in both directions simultaneously.
The PCIe standards support multi-lane connections indicated by the notations x1, x2, x4, x8, x16, and x32. Most modern motherboards implement, as a minimum, PCIe x1 and x16 slots. PCI x1 slots are compatible with a board edge connector length of 25mm while x16 slots expect a board edge connector length of 89mm. A PCIe card will operate correctly in any slot it can physically fit into. For example, a PCIe x1 card can be plugged into an x16 slot and will use just one of the 16 available lanes.
A primary application for PCIe x16 slots is the interface between the processor and the graphics card, with the goal of peak performance for graphics-intensive applications such as gaming. A PCIe 4.0 x16 interface is capable of unidirectional data transfer at 31.5 GB/s.
In modern computer architectures, the processor chip usually provides a PCIe 16-lane interface as a direct connection to a graphics board installed in a PCIe x16 slot. This avoids the need to pass the graphics card PCIe signals through the chipset integrated circuit.
Except for the graphics display and the system memory interface, most I/O in modern computer systems is managed by the chipset. The processor and chipset communicate through a collection of HSIO lanes. The chipset supports interfaces to peripheral devices such as disk drives, network interfaces, keyboard, and mouse. The interfaces to these devices commonly use SATA, M.2, and USB serial interfaces.
SATA
The Serial AT Attachment (SATA) is a bi-directional serial interface standard for connecting computer motherboards to storage devices. The "AT" in SATA refers to the original IBM PC AT. Similar to a single PCIe lane, SATA contains two differential signaling pairs of conductors, with one pair carrying data in each direction. Unlike PCIe, SATA is intended for operation over cables rather than using signal traces on motherboards. In addition to electrical and data format requirements, the SATA standard contains detailed specifications for compatible cables and connectors.
A SATA cable contains one bi-directional lane supporting connection between the processor and storage devices such as magnetic disk drives, optical disk drives, and solid-state drives. This table shows the major revisions of the SATA standard, the year each was introduced, and performance parameters.
Table 4.2: SATA generations

The data transfer rate in this table describes one-way communication, though, like PCIe, SATA supports full-duplex data transfer.
The SATA standard continues to undergo incremental improvements, but as of 2019 there has been no announcement of an upcoming SATA generation with a faster data transfer rate.
M.2
Modern solid-state drives (SSDs) employ flash memory to store data rather than the rotating magnetic platters in traditional hard drives. Because of the radically different technology of SSDs, the SATA drive interface that works well enough in most cases for rotating disks has proven to be a significant performance barrier for SSDs.
To access an arbitrary block of data (called a sector) on a magnetic disk drive, the drive head must physically move to the track containing the sector, then it must wait for the beginning of the sector to rotate to the head position before the drive can begin reading data. In contrast to these steps, an SSD can directly address any data sector in a manner very similar to the way in which a processor accesses a DRAM location.
The M.2 specification was developed to provide a small form factor and high-performance interface for flash memory storage in small, portable devices. The performance limitations of the SATA interface are removed, and it is possible to have data transfer rates to and from an SSD several times faster than SATA can support.
In addition to mass storage devices, M.2 supports other interfaces including PCIe, USB, Bluetooth, and Wi-Fi. Modern motherboards have begun to include M.2 slots, which, in addition to the higher performance, consume much less space in the computer case than traditional disks in their drive bays.
USB
The Universal Serial Bus (USB) interface provides a simple (from the user's viewpoint) interface for connecting a wide variety of peripheral devices to a computer system. USB cables have easily identifiable connector types and support hot-plugging (plugging devices together while powered on). USB devices are self-configuring, and, in most cases, users do not need to concern themselves with installing device drivers when attaching a new device to a computer with a USB cable.
Early USB data cables (through USB 2.0) contained a single differential signaling pair. These connections pass data in only one direction at a time. Later versions of the USB standard (USB 3.0 onward) support simultaneous bi-directional data transfer. In addition, USB 3.2 onward provides up to two lanes, doubling the data transfer rate.
The following table shows the major revisions of the USB standard, the date each was introduced, the maximum number of lanes supported, and data transfer performance.
Table 4.3: USB generations
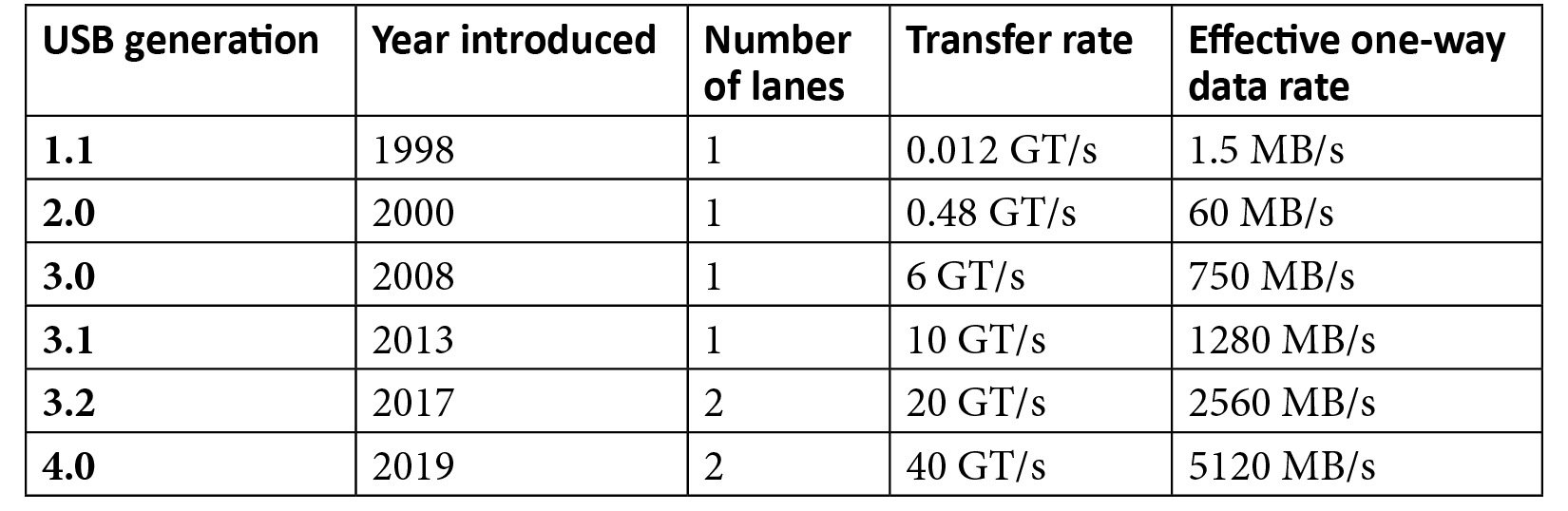
In USB generations through 2.0, communication takes place entirely under the control of the host. The host initiates each communication interaction by sending packets addressed to a particular device and performs data transfers to or from the device. Beginning with USB 3.0, devices can initiate communication with the host, effectively providing an interrupt capability for connected peripherals.
Thunderbolt
Thunderbolt is a collection of high-speed serial interface standards introduced in 2011. The original Thunderbolt interface combined PCIe and DisplayPort signal transmission using two serial Thunderbolt lanes.
Thunderbolt 3 is the latest generation of the Thunderbolt standard, adding USB compatibility while supporting connectivity to PCIe devices and to multiple high-resolution displays from a single computer port. Thunderbolt 3 uses the same connector as USB 3.1 and later generations (the USB-C connector), and supports the 40 Gbit/s Thunderbolt 3 data rate while providing full compatibility with USB 3.1 at 10 Gbit/s. Any USB device should operate properly when connected to a computer's Thunderbolt 3 port. Thunderbolt 3 peripheral devices are not compatible with non-Thunderbolt 3 USB-C ports.
The next section provides an overview of the most popular graphics display interface standards.
Graphics displays
In the domains of gaming, video editing, graphic design, and animation, video processing performance is critical. Generating and displaying high-resolution graphics requires an enormous number of mathematical calculations. While general-purpose processors can perform the necessary computations, such processors lack the performance that users of these applications have come to expect.
High-performance graphics cards, called graphics processing units (GPUs), are essentially miniature supercomputers, heavily optimized to perform graphical computational tasks such as 3-D scene rendering. Because the computations involved in scene rendering are highly repetitive, substantial performance gains can be achieved through the use of hardware parallelization. Graphics processors contain a large number of relatively simple computational units, each performing a small portion of the overall task.
A GPU may contain thousands of individual processing units that function in a manner similar to an ALU. While the original driving force that led to the development of high-performance GPUs was 3-D scene generation, later generations of this technology have found broad use in fields such as the analysis of "big data" and in machine learning. Any numerically intensive computational task that can be broken into a collection of parallel operations is suitable for acceleration with a GPU architecture.
Of course, not all users require extreme video performance. To accommodate users with modest graphics needs and more limited budgets, modern processors often integrate a GPU with less extreme capabilities into the processor chip. In many applications, this approach provides more than adequate graphical performance. This configuration is referred to as integrated graphics, meaning the GPU function is integrated into the processor die and shares system memory with the processor. Computer systems with integrated graphics are lower in cost while providing adequate graphics performance for basic computing tasks such as email, web browsing, and watching videos.
Many desktop computer systems, as well as some laptops, provide integrated graphics while offering the option of installing a high-performance graphics card. This allows users to tailor the computer system to their cost and performance needs.
Several different video standards are currently in use for connecting displays to computers. Because the output generated by a computer graphics interface must be compatible with the connected display, it is common for computers to provide more than one type of video connector. Computer monitors and high-definition televisions usually provide a selection of video connection types as well. The following sections describe some of the popular video interface standards used in computer applications, past and present.
VGA
The Video Graphics Array (VGA) video standard for personal computers was introduced by IBM in 1987. VGA is an analog interface that remains in widespread use today, though most modern computers do not provide a VGA connector. It is not uncommon to find older computers with VGA outputs using a converter cable to present a display on a monitor supporting DVI or HDMI video input. Modern versions of the VGA standard support display resolutions up to 1,920 pixels wide by 1,200 pixels high, refreshed at 60 Hz. Because the VGA video signal is analog, some loss of signal quality occurs during transmission to the display. This effect is most noticeable at high screen resolutions.
DVI
The Digital Visual Interface (DVI) video standard was developed to improve the visual quality of computer displays by transferring the video signal digitally from the computer to the monitor. To maintain backward compatibility with older computers and monitors, DVI cables are capable of carrying VGA analog signals as well.
Similar to the high-speed serial interfaces discussed earlier in this chapter, DVI uses differential serial signaling to transfer video data. A DVI connector contains four serial lanes: individual lanes carry red, green, and blue color information, and the fourth lane carries the common clock signal.
Three DVI variants are defined, depending on the combination of digital and analog video options supported:
- DVI-A supports only the analog video signal. This option is intended to provide backward compatibility with VGA computers and monitors. The DVI-A connector has a different pin layout than traditional VGA connectors, so an adapter cable is required to connect to legacy VGA devices.
- DVI-D is a digital-only interface supporting single-link and dual-link options. The dual-link option provides additional serial data lanes to increase the video bandwidth for higher-resolution displays. Dual-link does not mean the cable supports dual monitors.
- DVI-I is an integrated interface supporting both the analog interface of DVI-A and the digital modes of DVI-D. A DVI-I digital interface may be single- or dual-link.
DVI interfaces are used primarily in computer display applications. The effective data rate of a single-link DVI-D connection is 3.96 gigabits per second (Gbit/s). Dual-link DVI-D transfers video data at twice the single-link rate, 7.92 Gbit/s.
HDMI
The High-Definition Media Interface (HDMI) is supported by most modern computers and monitors, and by virtually all modern televisions and related video entertainment devices, such as DVD players. HDMI supports digital video only (there is no analog capability) and uses the same differential serial bus as DVI-D. In addition to video data, HDMI cables also transport multi-channel digital audio.
The HDMI standard has undergone several revisions since its introduction in 2002. Each successive revision has maintained backward compatibility while adding new capabilities. Later versions of the standard have increased video bandwidth, increased the range of supported screen resolutions, added high-definition audio capabilities, added support for Ethernet communication over the HDMI cable, and added features to support gaming. Although each HDMI version is backward compatible, newer features are only available in configurations where the signal source device, the display device, and the connecting cable are all compatible with the newer standard.
HDMI version 2.1 was released in 2017. This standard supports an effective data rate of 42.6 Gbit/s over four differential serial lanes.
DisplayPort
DisplayPort, introduced in 2006, is a digital interface standard supporting digital video, audio, and USB connections. While HDMI is targeted at consumer electronics such as televisions and home theater systems, DisplayPort is oriented more toward computer applications. DisplayPort transfers data in packets with clocking information embedded in each packet, eliminating the need for a separate clock channel.
A single computer DisplayPort output can drive multiple monitors connected in a daisy chain fashion, where one cable connects the computer to the first monitor, a second cable connects the first and second monitors, and so on. The monitors must provide support for this capability. The maximum number of displays that can be combined in this manner is limited only by the capabilities of the graphics card and the resolution and refresh rate of the displays.
DisplayPort 2.0 was released in 2019, with an effective data rate of up to 77.4 Gbit/s over four differential serial lanes.
Network interface
A computer network is a collection of digital devices interacting over a shared communication medium. A local area network (LAN) consists of a limited number of computers that might reside in a single physical location such as a home or office building. The connected computers, phones, and other digital devices in your home represent a LAN. Device connections within a LAN environment may use a wired interface, usually Ethernet, or wireless interface, typically Wi-Fi.
Geographically separated computers and LANs communicate using a wide area network (WAN). WAN services are often provided by a telecommunication company such as a cable television provider or telephone company. Your home LAN most likely connects to the Internet via WAN services provided by your telephone or cable company. Home and business networking devices provided by WAN service providers usually provide Ethernet and Wi-Fi options for connecting local devices to the WAN. The following sections introduce the technologies of Ethernet and Wi-Fi.
Ethernet
Ethernet is a set of networking standards for connecting computers using cables in a LAN environment. The original version of Ethernet was developed by Robert Metcalfe at Xerox Palo Alto Research Center in 1974. Ethernet was released commercially in 1980 as a 10 Mbit/s communication technology for groups of computers connected with coaxial cabling. The name of the technology was derived from the historical term luminiferous aether, a hypothesized medium filling all of space and enabling the propagation of electromagnetic waves. The Ethernet cable serves as a conceptually similar communication medium.
The Institute of Electrical and Electronic Engineers (IEEE) began developing standards for LAN technologies, including Ethernet, in 1980. The IEEE 802.3 Ethernet standard was published in 1985. Since then, the standard has undergone several revisions supporting increased data rates and different network topologies. The most obvious difference in modern computers from the original Ethernet standard is the use of point-to-point twisted pair cables in place of the original shared coaxial cable.
Modern computers commonly use Gigabit Ethernet interfaces to communicate over unshielded twisted-pair cabling. Gigabit Ethernet is formally defined in the IEEE 802.3ab standard and supports 1.0 Gbit/s with an effective data transfer rate up to 99% of the raw bit rate, though the amount of overhead varies considerably depending on the communication protocol in use.
Ethernet communication is composed of variable-size data units called frames up to 1,518 bytes in length. The header of each frame contains addressing information identifying the source and destination Ethernet interfaces. Because modern twisted-pair connections are point-to-point, the most common structure for connecting a group of computers is to run a cable from each computer to a switch. A switch is a device that receives frames transmitted by the connected computers and, based on the destination address contained in each frame, immediately forwards it to the correct recipient. Ethernet cables are limited to a maximum recommended length of 100 meters, constraining the physical size of an Ethernet LAN to an area such as a single office building or home.
Modern motherboards usually contain a built-in Ethernet interface. This eliminates any need to consume a PCIe slot with an Ethernet card. An Ethernet interface, whether built into the motherboard or installed in a PCIe expansion slot, uses one HSIO lane between the processor and chipset.
Wi-Fi
The IEEE released the first version of the 802.11 wireless communication standard in 1997 with a raw data rate of 2 Mbit/s in the 2.4 GHz band. The 802.11b standard, released in 1999 with an 11 Mbit/s raw data rate, proved to be commercially popular. The technology was named Wi-Fi in 1999 as a reference to the term "hi-fi," referring to high-fidelity sound reproduction.
The 802.11g standard, released in 2003, has a raw bit rate of 54 Mbit/s. 802.11n, released in 2009, supports multiple-input-multiple-output (MIMO) antennas and optional operation in the 5 GHz band. The 802.11ac standard, published in 2013, supports a bit rate in the 5 GHz band of over 500 Mbit/s using enhanced MIMO antenna configurations.
Wi-Fi devices can suffer from interference produced by household appliances such as cordless phones, microwave ovens, and other Wi-Fi networks in the area. Wi-Fi signal propagation is affected by factors such as walls and other obstacles between transmitter and receiver, multipath (the destructive interference between a direct-path signal and a reflected copy of the signal), and is limited by the maximum amount of power a Wi-Fi transmitter is permitted to emit. The use of multiple antennas in 802.11n and 802.11ac configurations significantly mitigates multipath-related propagation issues.
Modern WAN interface devices supplied by telecommunication service providers usually contain a combination of Ethernet and Wi-Fi communication interfaces. A primary benefit of Wi-Fi in comparison to Ethernet for these applications is the reduction in the amount of cabling required. One drawback of Wi-Fi is the potential for security issues because the radio frequency signal can propagate far outside of the building containing the communicating systems. The Wi-Fi protocols provide substantial support for secure communication using protocols such as Wi-Fi Protected Access 2 (WPA2), but system administrators and users must ensure the appropriate security features are enabled and that secret information such as the network password is sufficiently complex and is stored securely.
Support for Wi-Fi is ubiquitous in portable digital devices such as laptops, smartphones, and tablets, and is directly built into many motherboards.
The next section discusses the computer interfaces with the lowest bandwidth requirements: the keyboard and mouse.
Keyboard and mouse
Compared to the high-speed device interfaces discussed earlier in this chapter, the bandwidth requirements for a keyboard and mouse are quite modest. These devices are the sole input methods used by the human operator in most computer configurations, and thus are only required to operate at the speed of human actions. Even the fastest typist can only press one or two dozen keys per second.
Keyboard
A mechanical computer keyboard consists of a collection of keys, each of which operates an electrical momentary switch. A standard full-size keyboard contains 104 keys, including the arrow keys, control keys (Home, Scroll Lock, and so on), and the numeric keypad. Modern keyboards commonly provide a USB cable for connection to the computer system via cable or wirelessly. Because the bandwidth requirements for human interaction are so low, some computer motherboards provide a slower USB 2.0 port for keyboard connection while offering higher-performance USB 3.0 or better interfaces for high-speed peripherals. This results in a small cost reduction for the motherboard components.
Because the keyboard reports the press and release of each key separately, the computer is able to process combinations of keys pressed simultaneously. For example, holding the shift key down while pressing the a key produces a capital A.
Some computers and digital devices such as tablets and phones provide a touchscreen interface. When text input is required on these devices, the system displays a keyboard pattern on the screen and the user touches letter locations to produce keypresses.
Mechanical keyboards tend to provide more accurate input and are favored by users entering significant quantities of text. Because the surface of a touchscreen is completely flat, there is no feedback to the user's fingers indicating if the fingers are aligned with the keys. This results in more frequent input errors when using touchscreen keyboards. Of course, a touchscreen keyboard means there is no need to provide a mechanical keyboard for the device, a substantial benefit for portable devices. In addition, touchscreen keyboard input does not suffer from mechanical failures that can affect the components of mechanical keyboards, though touchscreen input is more difficult for users wearing gloves.
Mouse
A computer mouse is a hand-held device that moves a pointer horizontally and vertically across a computer screen. The user initiates actions based on the pointer location by pressing buttons on the mouse. Modern mice often provide a small wheel capable of rolling in either direction, used to perform tasks such as scrolling through a text document.
As with the keyboard, the mouse usually connects to the computer via USB over a wired or wireless connection. The mouse has low bandwidth requirements and can be supported via a USB 2.0 port.
The operation of a mouse requires a horizontal surface, typically a desktop, for the user to move the mouse upon. Modern mice usually use optical emitters and sensors to detect motion across the surface. Many mice have difficulty operating on highly reflective surfaces such as glass tables.
A trackball is similar in concept to a mouse, except that rather than moving a mouse across a surface, a ball is held at a fixed location but is allowed to rotate in any direction using hand motion. By rolling the ball forward, backward, left, and right, the user is able to move the pointer on the computer display.
A trackball does not require the quantity of surface space a mouse needs, and the trackball can be fixed at a stationary location. The ability to firmly attach a trackball to a surface makes the trackball the preferred pointing device for computer stations installed in ground vehicles, ships, and aircraft.
As with the keyboard, the computer detects the press and release of each mouse button as separate events. Users can exploit this capability to perform operations such as dragging an icon across the screen by following these steps:
- Place the pointer over the icon.
- Press and hold the left mouse button.
- Move the pointer (with the icon now attached) to the new location.
- Release the mouse button.
Together, the keyboard and mouse provide all of the input capability most computer users need to perform their interactive tasks.
The next section brings together the interface descriptions provided in this chapter to examine the specifications of a modern computer motherboard.
Modern computer system specifications
Having absorbed the information provided up to this point, you should be able to interpret most of the specifications of a modern computer motherboard, processor, and chipset. This section provides an example of the specifications for a current (2019) motherboard with some explanation of the individual features.
The designers of a computer motherboard must make a number of decisions such as the number of PCIe expansion ports, number of DIMM slots, number of USB ports, and the number of SATA ports to be provided in a particular motherboard model. These decisions are guided by the target customer demographic, whether it be gamers, business users, or cost-conscious home users.
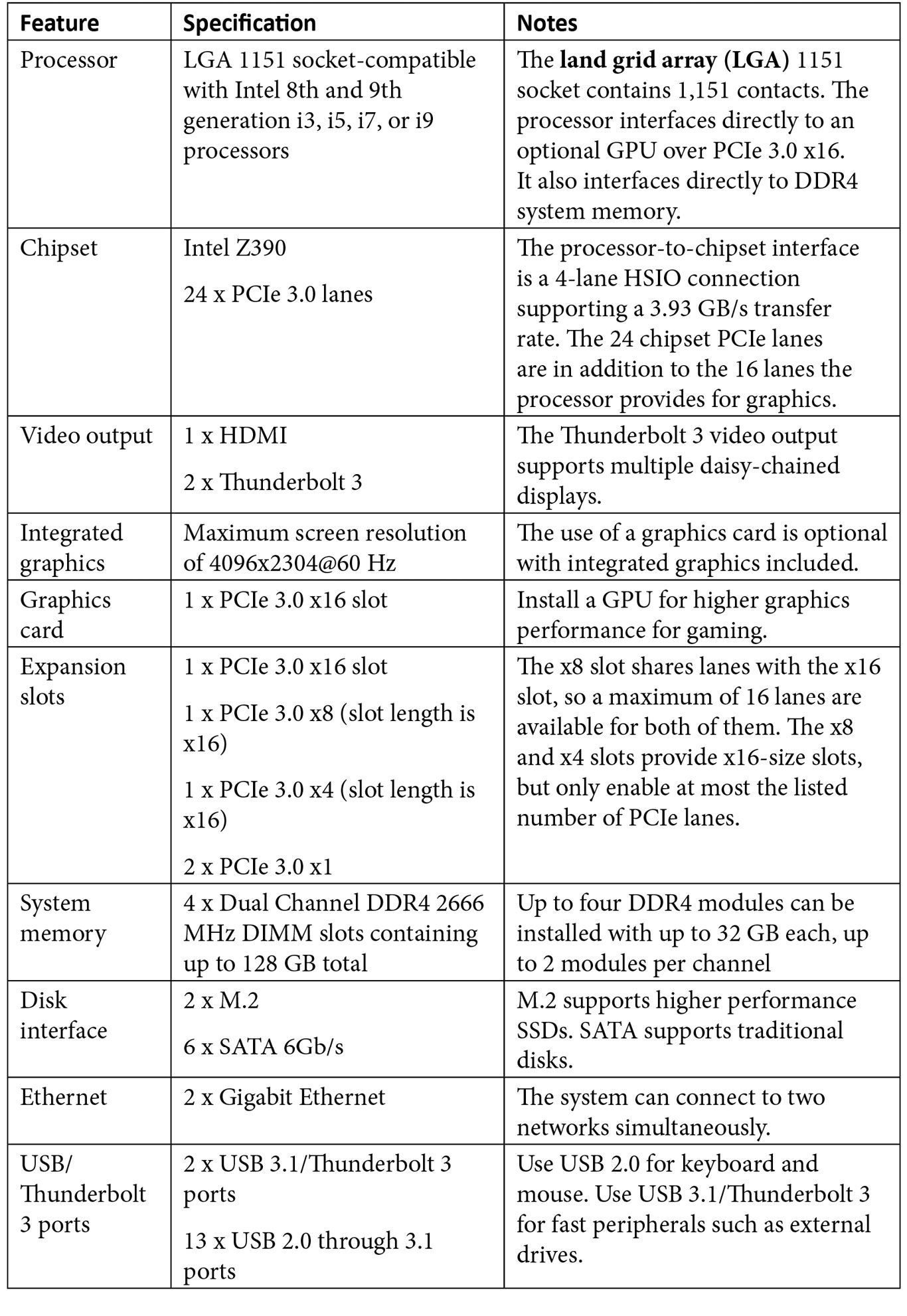
The following example motherboard presented is the Gigabyte Z390 Designare, a higher-performance board intended for gaming applications that supports gaming-related technical capabilities such as overclocking. Overclocking involves increasing the clock frequencies for the processor and other system components with the goal of improving performance.
Overclocking introduces the possibility of increased heat generation and unstable performance if a component is driven at an excessive frequency.
Table 4.4: Example motherboard specifications
This example is intended to provide some perspective on the specifications of higher-end consumer-grade computer capabilities as of 2019. If you are looking to purchase a computer, use the information in this chapter to make yourself a more informed consumer.
Summary
This chapter began with an introduction to the computer memory subsystem, the MOSFET, and the capacitor. We examined the circuitry that implements the DRAM bit cell. We reviewed the architecture of DDR4 memory modules and the operation of multichannel memory controllers. Other types of I/O devices were introduced, with a focus on high-speed differential serial interfaces and their ubiquitous use in connection technologies such as PCIe, SATA, USB, and video interfaces.
Popular video standards were presented, including VGA, DVI, HDMI, and DisplayPort. We looked at the Ethernet and Wi-Fi networking technologies as well. We concluded with a discussion of standard computer peripheral interfaces including the keyboard and mouse. The chapter concluded with a description of an example modern motherboard, highlighting some of its interesting features.
With the information presented in this chapter, you should have a solid general understanding of modern computer components from the level of technical specifications down to the technologies used in implementing the circuitry.
In the next chapter, we will explore the high-level services computer systems must implement, such as disk I/O, network communications, and interactions with users. We'll examine the software layers that implement these features, starting at the level of the processor instruction set and registers. Several key aspects of operating systems will be covered including booting, multithreading, and multiprocessing.
Exercises
- Create a circuit implementation of a NAND gate using two CMOS transistor pairs. Unlike NPN transistor gate circuits, no resistors are required for this circuit.
- A 16-gigabit DRAM integrated circuit has two bank group selection inputs, two bank selection inputs, and 17 row address inputs. How many bits are in each row of a bank in this device?