CHAPTER 8
ROBOTIC APPLICATIONS AND NEW DIRECTIONS
In recent years, there has been a great interest in finding new applications for robotics technology. Many universities, research labs, and companies have been focusing on developing new robotics systems to perform tasks that previously were limited only to humans. The goal of this research effort has been to develop robots to aid humans in difficult, dangerous, or disaster situations where humans cannot work. Achieving such a goal requires novel engineering and scientific solutions to the fundamental problems in the field of robotics such as locomotion in rough terrain, navigation, object manipulation, and human robot interaction. As more advancement in such areas are made, cheaper and more reliable hardware and more intelligent and mature software are developed, which allows new robotic products for new applications to become available.
In this chapter, you will learn about a range of current applications of robotics technology and will look at examples of robotic prototypes and products that have been developed for these applications.
INDUSTRIAL ROBOTS
In the early 1960s, the world’s first robots began operating in factories to perform a variety of repetitive production tasks such as welding, cutting, drilling, painting, and parts assembly, all of which were either tedious or dangerous for humans or required a high degree of accuracy. Figure 8.1 shows a Fanuc robotic arm handling the process of making car wheels. Figure 8.2 shows a dual-arm Baxter robotic arm used to pick and place items on the production line. Figure 8.3 shows a series of Tosy parallel robots used for the same purpose.
Figure 8.1
A Fanuc industrial robot.

© 2014 http://www.fanucrobotics.com/, All Rights Reserved.
Figure 8.2
A Baxter industrial robot.

© 2014 http://www.rethinkrobotics.com, All Rights Reserved.
Figure 8.3
Tosy industrial robots.

© 2014 http://tosy.com/, All Rights Reserved.
During operation, industrial robots move at a high speed and on efficient paths for better performance. Therefore, they work in highly structured environments designed specifically for them, which limit their interaction with humans, other robots, and other objects to reduce the chance of collisions. The end effectors that industrial robots use for manipulating objects are usually specifically designed for a given task. Figure 8.4 shows a welding robot with end effectors that allow it to hold welding equipment, and Figure 8.5 shows an end effector that uses suction to lift light, irregularly shaped objects.
Figure 8.4
An industrial robot with end effectors designed for welding.

© 2014 http://www.robots.com, All Rights Reserved.
Figure 8.5
An industrial robot with end effectors designed for lifting light, irregularly shaped objects.

© 2014 http://us.schmalz.com, All Rights Reserved.
Although using special-purpose end effectors limits a robot’s ability to manipulating only specific types of objects at a time, this improves the robot’s efficiency in performing its task, which is important in an industrial setting. Generally, when a robot’s tasks need to be changed, the robot is taken offline and its end effectors and control program are changed accordingly to support the new task. Some industrial robots, however, are capable of changing their end effectors automatically during operation. Figure 8.6 shows an industrial robot with this capability.
Figure 8.6
An industrial robot with tool-changing capabilities.

© 2014 Tormach Tooling System, All Rights Reserved.
In early years, detecting the parts and objects that an industrial robot needed to pick or interact with was a difficult job. Therefore, these objects were placed in exact locations that were known to the robot so the robot could interact with them without needing to sense them. This approach is called the “open loop approach.” In recent years, with advances in computer-vision and object-recognition technology, industrial robots have begun using cameras to detect the objects with which it needs to interact at a very high speed. This adds more flexibility and intelligence to the robot. Sensors are also used to monitor the robot’s surroundings to enable it to avoid collisions and to allow for increased safety.
MEDICAL ROBOTS
Robots have been used in medicine since the 1980s, with robotic surgery being among the first applications. Surgical robots offer high precision and advanced sensors, which give human surgeons better, less-invasive access to the areas under operation. A surgical robot usually includes a surgical unit and a number of control stations. The surgical unit consists of two or more high-precision robotic arms to hold and manipulate the surgical instruments and one or more high-resolution cameras and other sensors to gather information about the area of operation. The control stations are for the human surgeons to access the cameras’ and sensors’ data and to manipulate the robotic arms. Small, precise incisions allow the camera and robotic instruments to enter the patient’s body at the area of operation and enable the human surgeon to perform a minimally invasive operation with a high degree of precision. Figure 8.7 shows images of the da Vinci surgical robot, the first commercially available surgical robot.
Figure 8.7
The da Vinci surgical robot.

© 2014 davincisurgery.com, All Rights Reserved.
As shown in the photo on the left in Figure 8.7, one or more human surgeons sit at the robot control station and perform the operation in real time. The control station and surgical unit are connected through fast and reliable communication links. Advances in the development of reliable, high-speed communication links make it possible for the control station, where the surgeons are, and the surgical unit, which is where the patient is, to be hundreds of miles apart—something called “remote surgery.” This allows a surgeon to perform an operation on a patient who is not at the same geographical location—especially important for people who live in remote areas, where access to surgeons is not readily available. Currently, surgical robots operate under the full control of human surgeons. They do not operate autonomously. However, as this technology evolves, it will be possible for intelligent robots in the future to autonomously perform surgical procedures.
Another application of robots in the medical field is telepresence. Telepresence technology enables physicians to provide medical care without having to be physically present where the patient is. Figure 8.8 shows a physician televisiting with his patient in a hospital. Telepresence technology enables this patient to receive medical care despite the fact that she and her physician are in different geographical areas.
Figure 8.8
A physician visits a patient using a telepresence robot.

© 2014 Dalhousie University, All Rights Reserved.
Telepresence robots have equipment to create audio and visual connections between the patient and the physician through the Internet. This enables the physician to ask questions, make necessary recommendations, and send prescriptions. These robots may also have sensors to measure the patient’s vital signs, communicate them to the physician, and automatically update the patient’s file accordingly. Finally, telepresence robots have sensors and actuators that enable them to safely move in the environment, going from one patient to another if necessary.
Medical robots are effective tools for assisting physicians in providing timely, quality medical care and potentially reducing the cost of health care. These robots could perform critical roles, especially in remote areas where surgeons and physicians might not always be available and timely transfer of the patient to a health care facility might not be possible.
FLYING ROBOTS
Unmanned aerial vehicles (UAVs) are robots that are designed to fly. UAVs are equipped with actuators necessary for flying; sensors such as an accelerometer, a gyroscope, a barometer, ultrasonic sensors, and a GPS that gather information such as altitude, orientation, and speed; and on-board flight-controller computers, which select and send flight-control commands to the flight actuators based on the data received from the sensors. UAVs can autonomously take off, fly, and land, and perform other tasks during flight.
UAVs exist in different sizes and shapes, from large airplane-like vehicles to animallike micro flying robots. Large UAVs, called drones, are used in military operations and in civilian applications such as firefighting, pipeline and border control, surveillance, search and rescue, and security. Although drones have the ability to fly autonomously, they are usually remotely controlled by one or more human pilots to perform their intended operations. Figure 8.9 shows a Predator drone operated by U.S. Customs and Border Protection.

© 2014 http://businessfacilities.com/, All Rights Reserved.
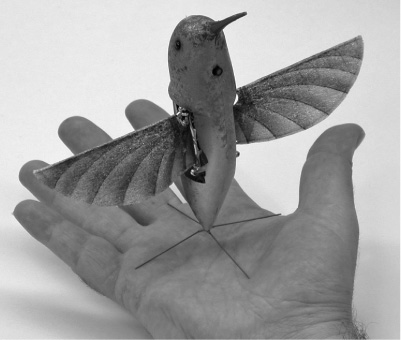
Smaller UAVs are used in indoor and outdoor applications such as small-objects delivery, parts assembly, search and rescue, surveillance, indoor mapping, and security operations. Figure 8.10 shows a quad-copter UAV, Figure 8.11 shows a micro-size flying robot, and Figure 8.12 shows a robotic hummingbird. The main challenges in building micro-size flying robots are integrating actuators, sensors, micro-controllers, and the power source into the robot while keeping the weight of the robot to a minimum so that it can fly.

© 2014 http://aeroquad.com, All Rights Reserved.
Figure 8.11
A micro-mechanical flying insect.

© 2014 http://robotics.eecs.berkeley.edu, All Rights Reserved.
Figure 8.12
A robotic hummingbird.
© 2014 http://phys.org, All Rights Reserved.
UNDERWATER ROBOTS
Underwater is a difficult and hostile environment for humans to work due to the lack of air for breathing, increase of pressure with depth, lack of visibility, difficulty in communicating, and safety issues, just to name a few. These conditions make robots good candidates for working in this difficult environment. Underwater robots can dive thousands of feet under the water and collect samples or information about animals living on the ocean floor for marine biologists. They can also be used for studying underwater volcanoes and inspecting shipwrecks or underwater cables, oil pipes, or platforms. In the military, they are also used for neutralizing or detonating underwater mines.
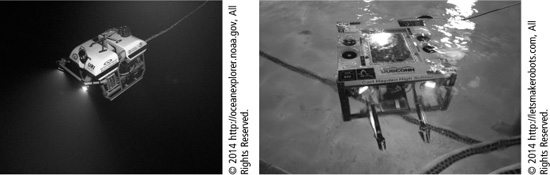
There are two types of underwater robots: Remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs). ROVs are underwater robots that are connected to a control station on the surface through a cable and are usually manually controlled by a human operator. ROVs carry video cameras, light projectors, and other sensors, and send visual information to the control station via the cable. The human operator uses this information to guide the robot. ROVs use a number of electric thrusters to move in the water. The required power is transferred to the robot through the tethered cable from a power source at the control station on the surface. ROVs could also have human-controllable manipulators—for example, to pick up samples from under the water or to perform other operations. Figure 8.13 shows two tethered underwater ROVs.
Figure 8.13
Two examples of ROVs.
AUVs can move freely underwater and usually travel longer distances than tethered ROVs. In addition to actuators and sensors, AUVs must carry a power source and an on-board computer for controlling their autonomous operation. Figure 8.14 shows an autonomous underwater vehicle propelled by three electric motors. Two of the motors—in front of the robot, on the right side of the image—are used for moving forward and turning. The third motor, installed at the middle of the robot, is used for moving the robot up and down in the water.
Figure 8.14
A motor-propelled AUV.

© 2014 http://www.computerrobotvision.org, All Rights Reserved.
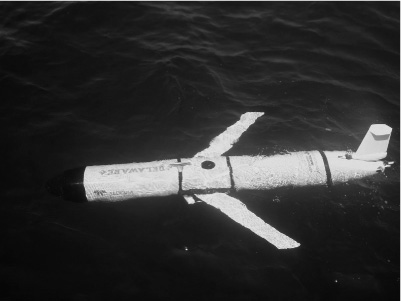
The range of a motor-driven AUV’s operation depends on the amount of electric power (usually batteries) that it can carry and is typically limited to only a few hours of operation. Another type of AUV is an underwater glider. These have very low power consumption, which enables them to spend many months under the water. Underwater gliders continuously make small changes in their buoyancy. When they make themselves heavier than water, they move down; when they make themselves lighter, they move up. An underwater glider also has two wings on its sides that push it forward as it goes up and down in the water. Underwater gliders are not as fast as motor-driven AUVs but have a much larger range. Indeed, they can move thousands of kilometers, collecting information as they go. An underwater glider is usually equipped with a satellite communication system to transfer information and receive new missions. Figure 8.15 shows an underwater glider.
Figure 8.15
An example of an underwater glider.
© 2014 http://maracoos.org, All Rights Reserved.
SERVICE ROBOTS
As you’ve seen, industrial robots work in highly structured environments specifically designed for them. Usually, industrial robots are fixed at a location and have very limited interaction with humans. In the late 1960s, a new type of robot was developed called a “mobile robot.” Unlike industrial robots, which reside and work in environments that are carefully designed for them, mobile robots can move and perform tasks in unstructured environments.
Mobile robots must adequately sense their environment to be able to perform their tasks. They need to know where they are in the environment and to have access to a map of the environment to be able to navigate from one location to another. They should be able to detect obstacles and avoid them. Another requirement is that mobile robots should be able to effectively interact with the humans to get tasks done and to communicate necessary information.
In recent years, advances in mobile robot technology have given rise to a new application of mobile robots, called “service robots” or “personal robots.” These mobile robots can autonomously move and perform tasks in environments that are designed for humans. They are mainly involved in assisting people in doing everyday jobs that might be dirty, dull, dangerous, or repetitive such as security, home or office services, entertainment, elderly care, personal assistant, and acting as learning tools.
Service robots introduce new challenges to the field of robotics. Some of these challenges include the following:
![]() Now that humans and robots are cohabiting in the same environment, a major challenge is how they interact—for example, how a human tells a cleaning service robot to wash the dishes the next morning.
Now that humans and robots are cohabiting in the same environment, a major challenge is how they interact—for example, how a human tells a cleaning service robot to wash the dishes the next morning.
![]() Another issue is safety. A service robot is strong enough to hurt a human. Therefore, it is critical that robots that cohabit with humans be cognizant of their surroundings and the consequence to their actions.
Another issue is safety. A service robot is strong enough to hurt a human. Therefore, it is critical that robots that cohabit with humans be cognizant of their surroundings and the consequence to their actions.
![]() Environments designed for humans include stairs, furniture, doors, elevators, children, pets, clutter, appliances, tools, and possibly other service robots. For a service robot to be able to perform tasks in such an environment, it must be able to climb stairs, go through doors, use tools and appliances, avoid obstacles, and ensure safety.
Environments designed for humans include stairs, furniture, doors, elevators, children, pets, clutter, appliances, tools, and possibly other service robots. For a service robot to be able to perform tasks in such an environment, it must be able to climb stairs, go through doors, use tools and appliances, avoid obstacles, and ensure safety.
![]() One challenge with using service robots is the localization and mapping of an environment designed for humans. Robots should be able to determine where it and other things are in the environment and to detect changes in the environment. For example, if you ask a robot to bring you a bottle of water from the fridge, the robot must know where the kitchen is and be able to use the map of the environment to navigate to the kitchen and back to where you are.
One challenge with using service robots is the localization and mapping of an environment designed for humans. Robots should be able to determine where it and other things are in the environment and to detect changes in the environment. For example, if you ask a robot to bring you a bottle of water from the fridge, the robot must know where the kitchen is and be able to use the map of the environment to navigate to the kitchen and back to where you are.
The look and form factor of service robots influences humans’ interactions with the robots. These robots should be easy to be around and should not look intimidating. For example, if a service robot is the companion of an elderly person, the robot should look trustworthy and easy to talk to.
Figures 8.16–8.20 show a number of service robot designs. Figure 8.16 shows Fujitsu Enon service robots, which have wheeled locomotion. Figure 8.17 shows an ASIMO service robot carrying shopping bags. Figure 8.18 shows a Battlefield Extraction-Assist Robot (BEAR), used to rescue wounded soldiers on the battlefield without risking additional lives. BEAR also uses wheeled locomotion. Figure 8.19 shows a REEM-C service robot, which uses biped walk locomotion. Figure 8.20 shows a Cosero service robot picking up a cup from a table using visual information.
Figure 8.16
Enon service robots, by Fujitsu.

© 2014 http://www.fujitsu.com, All Rights Reserved.
Figure 8.17
An ASIMO service robot, by Honda.

© 2014 www.honda.com, All Rights Reserved.
Figure 8.18
A BEAR rescue robot.

© 2014 http://airsoftinformations.blogspot.com, All Rights Reserved.
Figure 8.19
A REEM-C service robot.

© 2014 http://pal-robotics.com/en/robots, All Rights Reserved.
Figure 8.20
A Cosero service robot.

© 2014 http://www.ais.uni-bonn.de, All Rights Reserved.
Service robots should be able to use tools and appliances that are designed for humans—for example, a knife to peel an orange. This requires a high degree of dexterity, flexibility, and control in manipulating objects. Figures 8.21 and 8.22 show two robot hand designs. Figure 8.21 shows the care-o-bot hand, with three fingers, holding a bottle. The fingers can rotate to surround the object for manipulation. In this design, being similar to a human hand has not been considered. Figure 8.22 shows the Mekabot hand. This design has three fingers and a thumb. This hand is designed to be similar to a human hand, but with only three same-sized fingers.
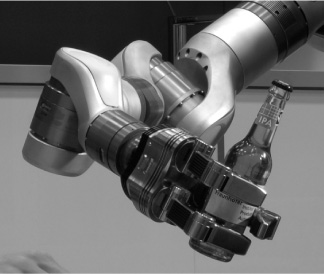
© 2014 http://www.care-o-bot.de, All Rights Reserved.

© 2014 mekabot.com, All Rights Reserved.
As robotics technology advances, more and more people’s everyday jobs will be done by service robots. Service robots will be integrated into people’s lives at home, in offices, in hospitals, in schools, in public venues, and in many other places. In addition to solving the technical challenges of using service robots, there are social, cultural, legal, and many other human-related issues that need to be resolved.
SUMMARY
In this chapter, you saw a range of applications of robotics technology in the areas of industrial robots, medical robots, flying robots, underwater robots, and service robots. There is a lot of interest in developing new intelligent robotic systems to perform difficult or dangerous tasks that previously were limited only to humans. With the advancements in robotics technology, cheaper and more reliable robotic products for new applications become available every day.