
EV3 is equipped with a number of outputs. Some of them are simple but non-obvious, such as the LEDs under the navigation buttons, the speaker that can play audio files, and the LCD screen itself that can display text and images (in black and white, of course). We will discuss how to use these outputs in Chapter 3, EV3 Brick Programming.
The primary outputs of EV3, however, are the motors that enable locomotion. This is the fundamental characteristic of robots—any computer can play sounds and display images, but only a robot can move around on its own.
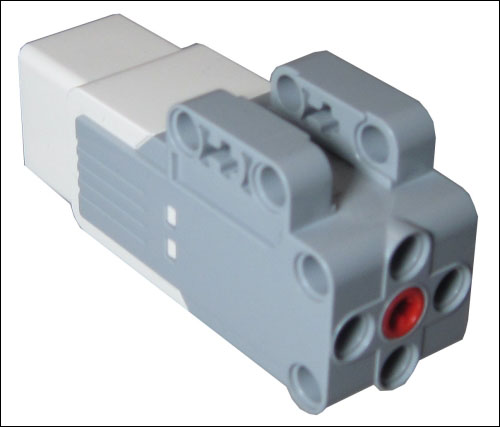
EV3 is shipped with three motors, one medium and two large, as shown in the following screenshot. These are distinguished by their shape, layout of the rotor, speed, torque, and precision.
|

|
The speed of a motor is usually measured in rpm (rotations per minute), while the torque indicates the rotational force being delivered by the motor. If the motor is driving a heavy object or it is attached to a wheel experiencing a large amount of friction, then the motor is delivering a high torque.
As the load on a motor increases (we demand high torque from it), the motor slows down (its speed drops). This trade-off between speed and torque is a universal feature of motors. Given a fixed amount of input power, one can either have high speed or high torque but not both simultaneously.
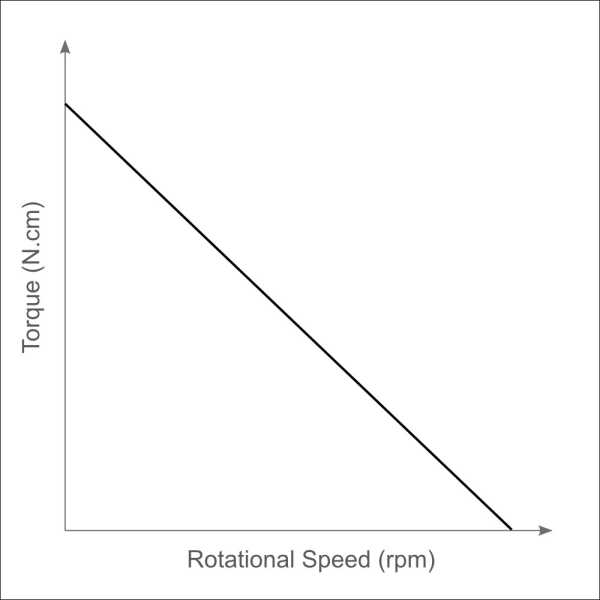
The relationship between the speed and torque of a Direct Current (DC) motor is given by its characteristic curve, which is practically linear, as shown in the following diagram. With no load, the motor turns rapidly. When the motor stalls, it delivers a very high torque. The stall torque is the maximum possible torque that a motor can deliver and therefore, sets the limit on what sort of loads the motor can drive. Stalling a DC motor is not recommended because the current delivered becomes very high and can cause irreparable damage to the motor.
The characteristic curve of a DC motor (that is, the relationship between its torque and speed) can be altered by using gears. By gearing down a DC motor, one reduces the speed and increases the delivered torque. Conversely, gearing up a DC motor increases speed but at the cost of losing torque.
Tip
This concept should be familiar to anyone who has ridden a geared bicycle. On a flat road, you use a high gear to achieve high speed, since you are facing low resistance (only friction). However, when going up a hill, you switch to a low gear, which makes it easier to tackle the gradient (higher torque delivered) but you are unable to go very fast.
The motors that come with EV3 (medium and large) are stuffed with gears inside. These gears are used to provide each motor with a certain running speed and torque, as outlined in the following table:
|
Running Speed |
Running Torque |
Stall Torque | |
|---|---|---|---|
|
Medium motor |
240-250 rpm |
8 N.cm |
12 N.cm |
|
Large motor |
160-170 rpm |
20 N.cm |
40 N.cm |
As you can see, the medium motor is designed to be able to run at a high speed. For a load torque of less than 8 N.cm, it is guaranteed to run faster than 240 rpm. Thus, the medium motor is intended for situations where you have a light load that needs to be spun fast.
The large motor is the workhorse of EV3. It is able to provide speeds of 160-170 rpm while delivering a significant amount of torque (20 N.cm). It is used in situations where you have to move a large load at a decent speed. Since the EV3 brick has a significant weight, large motors are often used to move the entire robot around, while the medium motor is used to move parts of the robot.