
Appendix A
Representation of Signals in a Signal Space
A.1 LINEAR VECTOR SPACES
In order to facilitate the geometrical representation of signals, we treat them as vectors. Indeed, signals can be considered to behave like vectors, as will be shown in the sequel. For that purpose we recall the properties of linear vector spaces. A vector space is called a linear vector space if it satisfies the following conditions:

where x and y are arbitrary vectors and α and β are scalars.
In an n-dimensional linear vector space we define a so-called inner product as

where xi and yi are the elements of x and y, respectively. Two vectors x and y are said to be orthogonal if x · y = 0. The norm of a vector x is denoted by || x || and we define it by

This norm has the following properties:

In general, we can state that the norm of a vector represents the distance from an arbitrary point described by the vector to the origin, or alternatively it is interpreted as the length of the vector. From Equation (A.9) we can readily derive the Schwarz inequality
![]()
A.2 THE SIGNAL SPACE CONCEPT
In this section we consider signals defined on the time interval [a, b]. As in the case of vectors, we define the inner product of two signals x(t) and y(t), but now the definition reads

Note that using this definition, signals behave like vectors, i.e. they show the properties 1 to 8 as given in the preceding section. This is readily verified by considering the properties of integrals.
Let us consider a set of orthonormal signals {ϕi(t)}, i.e. signals that satisfy the condition
![]()
where δij denotes the well-known Kronecker delta. When all signals of a specific class can exactly be described as a linear combination of the members of such a signal set, we call it a complete orthonormal signal set; here we take the class of square integrable signals. In this case each arbitrary signal of that class is written as

and the sequence {si} can also be written as a vector s, where the si are the elements of the signal vector s. Figure A.1 shows a circuit that reconstructs s(t) from the set {si} and the orthonormal signal set {ϕi(t)}; this circuit follows immediately from Equation (A.14).
No limitations are placed on the integer n; even an infinite number of elements is allowed. The elements si are found by

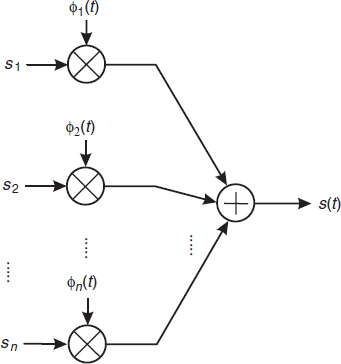
Figure A.1 A circuit that produces the signal s(t) from its elements {si} in the signal space

Figure A.2 A circuit that produces the signal space elements {si} from the signal s(t)
Therefore, when we construct a vector space using the vector s, we have a geometrical representation of the signal s(t). Along the ith axis we imagine the function ϕi(t); i.e. the set {ϕi(t)} is taken as the basis for the signal space. In fact, si, indicates to what extent ϕi(t) contributes to s(t). From Equation (A.15) a circuit is derived that produces the elements {si} representing the signal s(t) in the signal space {ϕi(t)}; the circuit is given in Figure A.2.
The inner product of a signal vector with itself has an interesting interpretation:

with Es the energy of the signal s(t). From this equation it is concluded that the length of a vector in the signal space equals the square root of the signal energy. For purposes of detection it is important to establish that the distance between two signal vectors represents the square root of the energy of the difference of the two signals involved.
This concept of signal spaces is in fact a generalization of the well-known Fourier series expansion of signals.
Example A.1:
As an example let us consider the harmonic signal s(t) = Re{a exp[j(ω0t + ψ)]}, where Re{·} is the real part of the expression in the braces. This signal is written as
![]()
As the orthonormal signal set we consider ![]() and the time interval [a, b] is taken as [0, T], with T = k × 2π/ω0 and k integer. In this signal space, the signal s(t) is represented by the vector
and the time interval [a, b] is taken as [0, T], with T = k × 2π/ω0 and k integer. In this signal space, the signal s(t) is represented by the vector ![]() . In fact, we have introduced in this way an alternative for the signal representation of harmonic signals in the complex plane. The elements of the vector s are recognized as the well-known quadrature I and Q signals.
. In fact, we have introduced in this way an alternative for the signal representation of harmonic signals in the complex plane. The elements of the vector s are recognized as the well-known quadrature I and Q signals.
![]()
A.3 GRAM-SCHMIDT ORTHOGONALIZATION
When we have an arbitrary set {fi(t)} of, let us say, N signals, then in general these signals will not be orthonormal. The Gram-Schmidt method shows us how to transform such a set into an orthonormal set, provided the members of the set {fi(t)} are linearly independent, i.e. none of the signal fi(t) can be written as a linear combination of the other signals. The first member of the orthonormal set is simply constructed as

In fact, the signal f1(t) is normalized to the square root of its energy, or equivalently to the length of its corresponding vector in the signal space.
The second member of the orthonormal set is constructed by taking f2(t) and subtracting from this f2(t) the part that is already comprised of ϕ1(t). In this way we arrive at the intermediate signal
![]()
Due to this operation the signal g2(t) will be orthogonal to ϕ1(t). The functions ϕ1(t) and ϕ2(t) will become orthonormal if we construct ϕ2(t) from g2(t) by normalizing it by its own length:

Proceeding in this way we construct the kth intermediate signal by

and by proper normalization we arrive at the kth member of the orthonormal signal set
![]()
This procedure is continued until N orthonormal signals have been constructed. In case there are linear dependences, the dimensionality of the orthonormal signal space will be lower than N.
The orthonormal space that results from the Gram-Schmidt procedure is not unique; it will depend on the order in which the above described procedure is executed. Nevertheless, the geometrical signal constellation will not alter and the lengths of the vectors are invariant to the order chosen.
Example A.2:
Consider the signal set {fi(t)} given in Figure A.3(a). Since the norm of f1(t) is unity, we conclude that ϕ1(t) = f1(t). Moreover, from the figure it is deduced that the inner product ![]() and
and ![]() , which means that ϕ2(t) = f2(t)/2. Once this is known, it is easily verified that
, which means that ϕ2(t) = f2(t)/2. Once this is known, it is easily verified that ![]() and
and ![]() , from which it follows that g3(t) = f3(t) − ϕ1(t)/2. The set of functions {gi,(5)} has been depicted in Figure A.3(b). From this figure we calculate
, from which it follows that g3(t) = f3(t) − ϕ1(t)/2. The set of functions {gi,(5)} has been depicted in Figure A.3(b). From this figure we calculate ![]() , so that ϕ3(t) = 2g3(t), and finally from all those results the signal set {ϕi(t)}, as given in Figure A.3(c), can be constructed. In this example the given functions do not show linear dependence and therefore the set {ϕi(t)} contains as many functions as the given set {fi(t)}.
, so that ϕ3(t) = 2g3(t), and finally from all those results the signal set {ϕi(t)}, as given in Figure A.3(c), can be constructed. In this example the given functions do not show linear dependence and therefore the set {ϕi(t)} contains as many functions as the given set {fi(t)}.
![]()
A.4 THE REPRESENTATION OF NOISE IN SIGNAL SPACE
In this section we will confine our analysis to the widely used concept of wide-sense stationary, zero mean, white, Gaussian noise. A sample function of the noise is denoted by N(t) and the spectral density is N0/2. We construct the noise vector n in the signal space, where the elements of this noise vector are defined by
![]()
Since this integration is a linear operation, these noise elements will also show a Gaussian distribution and it will be clear that the mean of ni, equals zero, for all i. When, besides these data, the cross-correlations of the different noise elements are determined, the noise elements are completely specified. Those cross-correlations are found to be

Figure A.3 The construction of a set of orthonormal functions {ϕi,(t)} from a set of given functions {fi(t)} using the Gram-Schmidt orthogonalization procedure
elements are completely specified. Those cross-correlations are found to be
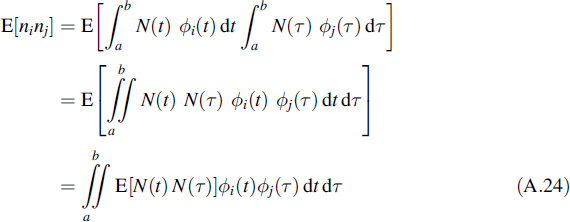
In this expression the expectation represents the autocorrelation function of the noise, which reads RNN(t, τ) = δ(t − τ)N0/2. This is inserted in the last equation to arrive at
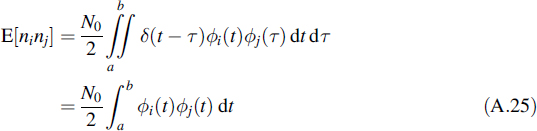
Remembering that the set {ϕi(t)} is orthonormal, the following cross-correlations result

From this equation it is concluded that the different noise elements ni are uncorrelated and, since they are Gaussian with zero mean, they are independent. Moreover, all noise elements show the same variance of N0/2. This simple and symmetric result is another interesting feature of the orthonormal signal spaces as introduced in this appendix.
A.4.1 Relevant and Irrelevant Noise
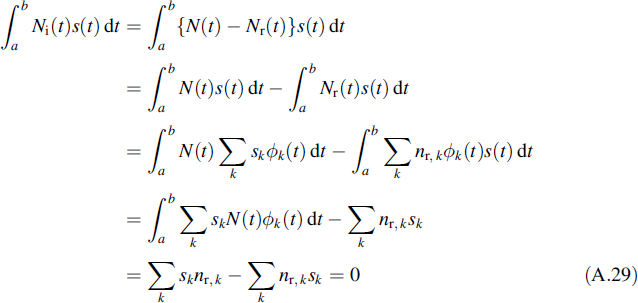
When considering a signal that is disturbed by noise we want to construct a common signal space to describe both the signal and noise in the same space. In that case we construct a signal space to completely describe all possible signals involved. When we want to attempt to describe the noise N(t) using that signal space, it will, as a rule, be inadequate to completely characterize the noise. In that case we split the noise into one part Nr(t) that is projected on to the signal space, called the relevant noise, and another part Ni(t) that is orthogonal to the space set up by the signals, called the irrelevant noise. Thus, the relevant noise is given by the vector nr with components

By definition the irrelevant noise reads
![]()
Next we will show that the irrelevant noise part is orthogonal to the signal space. For this purpose let us consider a signal s(t) and an orthonormal signal space {ϕi(t)}. Let us suppose that s(t) can completely be described as a vector in this signal space. The inner product of the irrelevant noise Ni(t) and the signal reads
For certain applications, for instance optimum detection of a known signal in noise, it appears that the irrelevant part of the noise may be discarded.
A.5 SIGNAL CONSTELLATIONS
In this section we will present the signal space description of a few signals that are often met in practice. The signal space with indications of possible signal realizations is called a signal constellation. In detection, the error probability appears always to be a function of Ed/N0, where Ed is the energy of the difference of signals. However, we learned in Section A.2 that this energy is in the signal space represented by the squared distance of the signals involved. Considering two signals si(t) and sj(t), their squared distance is written as

where Ei and Ej are the energies of the corresponding signals and Eij represents the inner product of the signals. In specific cases where Ei = Ej, = E for all i and j, Equation (A.30) is written as
![]()
with the cross-correlations ρij defined by
![]()
A.5.1 Binary Antipodal Signals
Consider the two rectangular signals
![]()
and their bandpass equivalents
![]()
with T = n × 2π/ω0 and n integer.
The cross-correlation of those signals equals − 1 and the distance between the two signals is
![]()
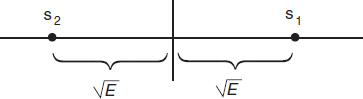
Figure A.4 The signal constellation of the binary antipodal signals
The space is one-dimensional, since the two signals involved are dependent. The signal vectors are ![]() and
and ![]() . This signal set is called an antipodal signal constellation and is depicted in Figure A.4.
. This signal set is called an antipodal signal constellation and is depicted in Figure A.4.
A.5.2 Binary Orthogonal Signals
Next we consider the signal set
![]()
![]()
where either T = nπ/ω (with n integer) or T ![]() 1/ω0, so that ρ12 = 0 or ρ12 ≈ 0, respectively. Due to this property those signals are called orthogonal signals. In this case the signal space is two-dimensional and
1/ω0, so that ρ12 = 0 or ρ12 ≈ 0, respectively. Due to this property those signals are called orthogonal signals. In this case the signal space is two-dimensional and ![]() , while
, while ![]() . It is easily verified that the distance between the signals amounts to
. It is easily verified that the distance between the signals amounts to ![]() . The signal constellation is given in Figure A.5.
. The signal constellation is given in Figure A.5.

Figure A.5 The signal constellation of the binary orthogonal signals
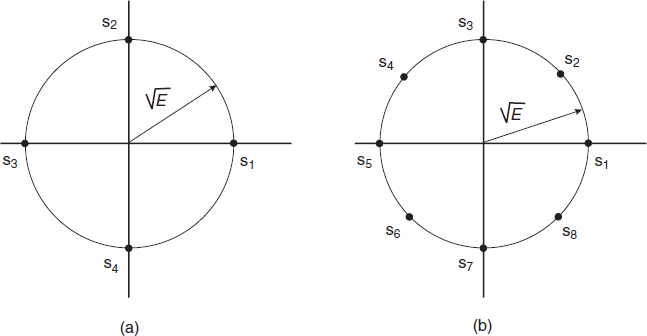
Figure A.6 The signal constellation of M-phase signals
A.5.3 Multiphase Signals
In the multiphase case all possible signal vectors are on a circle with radius ![]() . This corresponds to the M-ary phase modulation. The signals are represented by
. This corresponds to the M-ary phase modulation. The signals are represented by

with the same requirement for the relation between T and ω0 in the former section. The signal vectors are given by
![]()
In Figure A.6 two examples are depicted, namely M = 4 in Figure A.6(a) and M = 8 in Figure A.6(b). The case of M = 4 can be considered as a pair of two orthogonal signals; namely the pair of vectors [s1,s3] is orthogonal to the pair [s2,s4]. For that reason this is a special case of the biorthogonal signal set, which is dealt with later on in this section. This orthogonality is used in QPSK modulation.
A.5.4 Multiamplitude Signals
The multiamplitude case is a straightforward extension of the antipodal signal constellation. The extension is in fact a manifold, let us say M, of signal vectors on the one-dimensional axis (see Figure A.4). In most applications these points are equidistant.

Figure A.7 The signal constellation of QAM signals: (a) rectangular distribution; (b) circular distribution
A.5.5 QAM Signals
A QAM (quadrature amplitude modulated) signal is a signal where both the amplitude and phase are modulated. In that sense it is a combination of the multiamplitude and multiphase modulated signal. Different constellations are possible; two of them are depicted in Figure A.7. Figure A.7(a) shows a rectangular grid of possible signal vectors, whereas in the example of Figure A.7(b) the vectors are situated on circles. This signal constellation is used in such applications as high-speed telephone modems, cable modems and digital distribution of audio and video signals over CATV networks.
A.5.6 M-ary Orthogonal Signals
The M-ary orthogonal signal set is no more no less than an M-dimensional extension of the binary orthogonal signal set; i.e. in this case the signal space has M dimensions and all possible signals are orthogonal to all others. For M = 3 and assuming that all signals bear the same energy, the signal vectors are

This signal set has been illustrated in Figure A.8. The distance between two arbitrary signal pairs is ![]() .
.
A.5.7 Biorthogonal Signals
An M-ary biorthogonal signal set is constructed from an M/2-ary orthogonal signal set by simply adding the negatives of all the orthogonal signals. It will be clear that the dimension of the signal space remains as M/2. The result is given in Figure A.9(a) for M = 4 and in Figure A.9(b) for M = 6.

Figure A.8 The signal constellation of the M-ary orthogonal signal set for M = 3

Figure A.9 The signal constellation of the M-ary biorthogonal signal set for (a) M = 4 and (b) M = 6
A.5.8 Simplex Signals
To explain the simplex signal set we start from a set of M orthogonal signals {fi(t)} with the vector presentation {fi}. We determine the mean of this signal set

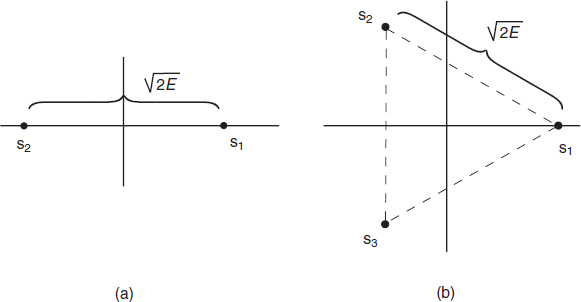
Figure A.10 The simplex signal set for (a) M = 2 and (b) M = 3
In order to arrive at the simplex signal set, this mean is subtracted from each vector of the orthogonal set:
![]()
In fact this operation means that the origin is translated to the point f. Therefore the distance between any pair of possible vectors si, remains ![]() . Figure A.10 shows the simplex signals for M = 2 and M = 3. Note that the dimensionality is reduced by 1 compared to the starting orthogonal set.
. Figure A.10 shows the simplex signals for M = 2 and M = 3. Note that the dimensionality is reduced by 1 compared to the starting orthogonal set.
Due to the transformation the signals are no longer orthogonal. On the other hand, it will be clear that the mean signal energy has decreased. Since the distance between signal pairs are the same as for orthogonal signals, the simplex signal set is able to realize communication with the same quality (i.e. error probability) but using less energy per bit and thus less power.
A.6 PROBLEMS
A.1 Derive the Schwarz inequality (A.11) from the triangular inequality (A.9).
A.2 Use the properties of integration and the definition of Equation (A.12) to show that signals satisfy the properties of vectors as given in Section A.1.
A.3 Use Equation (A.19) to show that g2(t) is orthogonal to ϕ1(t).
A.4 Show that for binary orthogonal signals one of the two given relations between T and ω0 is required for orthogonality.
A.5 Calculate the distance between adjacent signal vectors, i.e. the minimum distance, for the M-ary phase signal.
A.6 Calculate the energy of the signals from the simplex signal set, expressed in terms of the energy in the signals of the M-ary orthogonal signal set.
A.7 Calculate the cross-correlation between the various signals of the simplex signal set.
Introduction to Random Signals and Noise W. van Etten © 2005 John Wiley & Sons, Ltd