
9
Initial Value Problems for Ordinary Differential Equations
9.0 INTRODUCTION
Many problems in science and engineering can be reduced to the problem of solving differential equations satisfying certain conditions. For example, spring-mass systems, resistor- capacitor-inductance circuits, bending of beams, chemical reactions, pendulums, simple harmonic motions, the motion of a rotating mass and so on. Using analytical methods we can solve only standard types of differential equations. But the differential equations appearing in practical problems of engineering and science are not of the standard types and are complex. So, it is rather impossible to find closed form solutions. Such equations are solved by numerical methods where the solution is given as a table of values of the function at various values of the independent variable. This is called point wise solution. Such methods are called pointwise methods or single step methods because they use ![]() at
at ![]() to find
to find ![]() at
at ![]() . In contrast we have methods like Milne’s and Adam’s which use
. In contrast we have methods like Milne’s and Adam’s which use ![]() to find
to find ![]() . So they are called multistep methods.
. So they are called multistep methods.
We shall consider some of the methods commonly used to solve differential equations.
9.1 TAYLOR’S SERIES METHOD
Consider the first order differential equation ![]() with initial condition
with initial condition ![]() .
.
We can expand ![]() as a power series in
as a power series in ![]() in the neighbourhood of
in the neighbourhood of ![]() by Taylor’s series.
by Taylor’s series.
∴ ![]()
Put ![]()
![]()
∴ ![]()
![]()
If ![]() , then
, then
![]()
Now y can be expanded as Taylor’s series about ![]() and we have
and we have
![]()
Continuing this way, we find
![]()
where ![]()
![]()
The solution y (x) is given as a sequence ![]()
- If we calculate the value of
 by omitting
by omitting  and higher powers of h, the truncation error will be
and higher powers of h, the truncation error will be  where k is a constant and the corresponding Taylor’s series is said to be of second order.
where k is a constant and the corresponding Taylor’s series is said to be of second order.
If h is small and terms after n terms are neglected the error is
 where
where  if
if 
- It is a single step method. If f(x, y) is complicated function, higher derivatives cannot be found and so the method can not be used. This is the draw back of the method.
WORKED EXAMPLES
Example 1
Solve ![]()
![]() by Taylor’s series method. Find the values of y at x = 0.1 and x = 0.2.
by Taylor’s series method. Find the values of y at x = 0.1 and x = 0.2.
Solution
Given ![]()
![]()
∴ ![]()
![]()
Taylor’s series is ![]() (1)
(1)
We have ![]()
Differentiating we get, ![]()
![]()
At (x0, y0) = (0,1), ![]()
![]()
![]()
Substituting r = 0 in (1), we get ![]()
![]()
![]()
Now ![]()
Put ![]() in (1), we get
in (1), we get ![]()
At (x1, y1) = (0.1, 1.1103), ![]()
![]()
![]()
∴ ![]()
![]()
![]()
![]()
![]() the solution is
the solution is ![]()
![]()
Example 2
Using Taylor’s series method find y at x = 0, if ![]() .
.
Solution
Given ![]()
![]()
Taylor’s series is ![]()
![]() (1)
(1)
and y ′″ = x2y ″+ 2xy ′ + 2(xy ′+ y.1)
At ![]() y ′0 = 0 - 1 = -1
y ′0 = 0 - 1 = -1
![]() y ″0 = 0 + 0 = 0
y ″0 = 0 + 0 = 0
y ′″0 = 0 + 0 + 0 + 2.1 = 2
Putting ![]() in (1), we get
in (1), we get
![]()
![]()
![]()
![]()
![]()
![]()
Example 3
Using Taylor’s series method find y(1.1) and y(1.2) correct to four places given ![]() and
and ![]()
Solution
Given ![]()
![]()
![]()
![]()
Required ![]()
![]()
Taylor’s series is ![]()
![]() (1)
(1)
we have ![]()
![]()
![]()
and 
![]()
At ![]()
![]()
![]()
![]()
![]()
Putting ![]() in (1), we get
in (1), we get
![]()
![]()
![]()
![]()
![]()
Now ![]()
Putting ![]() ,we get
,we get
![]()
At ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
∴![]()
![]()
![]()
Thus ![]()
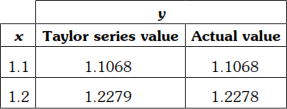
Since this equation ![]() is a simple variable separable equation we can solve and find the exact solution. We shall compare the computed value with the exact value.
is a simple variable separable equation we can solve and find the exact solution. We shall compare the computed value with the exact value.
where ![]()
So, solution is 
When  = 1.1068
= 1.1068
When  = 1.2278
= 1.2278
Example 4
Using Taylor’s series method find y at x = 1.1 and 1.2 by solving ![]() , given
, given ![]()
Solution
Given ![]()
![]()
Required y at ![]()
Taylor’s series is
![]()
![]() (1)
(1)
we have ![]()
∴ ![]()
and ![]()
![]()
At ![]()
![]()
![]()
![]()
![]()
![]()
Putting ![]() in (1), we get,
in (1), we get,
![]()
∴ ![]()
![]()
![]()
∴ ![]()
Now ![]()
Putting ![]() in (1), we get,
in (1), we get,
![]()
At ![]()
![]()
![]()
![]()
∴ ![]()
![]()
∴ ![]()
Hence ![]()
Example 5
Use Taylor series method to find ![]() given that
given that ![]() correct to 4 decimal accuracy.
correct to 4 decimal accuracy.
Solution
Given equation is ![]() and y(0) = 0
and y(0) = 0
∴ ![]()
Required ![]() ∴ h = 0.1
∴ h = 0.1
Taylor’s series is ![]()
![]() (1)
(1)
We have ![]()
∴ ![]()
and ![]()
Putting ![]() in (1), we get,
in (1), we get,
![]()
At ![]()
![]()
![]()
![]()
∴ ![]()
![]()
![]()
∴ ![]()
Now ![]()
Putting ![]() in (1), we get
in (1), we get ![]()
At ![]()
![]()
![]()
![]()
∴ ![]()
![]()
![]()
∴ y (0.2) = 0.8108
∴ ![]()
9.2 EULER’S METHOD AND MODIFIED EULER’S METHOD
Euler’s method is one of the simplest and oldest methods of finding numerical solution of differential equation. It is a step-by-step method because the values of y are computed by short steps ahead for equal intervals of the independent variable. This crude method is rarely used in practice but it explains the principle of methods based on Taylor’s series.
Consider the differential equation
![]()

Let ![]() be equidistant values of x where
be equidistant values of x where
![]() so that
so that ![]()
In Euler’s method we approximate a curve in a small interval by a straight line.
Let ![]() be the curve representing the actual solution.
be the curve representing the actual solution.
Equation of the tangent at ![]() is
is

![]()
∴ ![]()
Since the curve in the interval ![]() is approximated by this straight line, the value of y at
is approximated by this straight line, the value of y at ![]() is approximately
is approximately
![]()
![]()
Similarly the curve in the interval ![]() is approximated by the line through
is approximated by the line through ![]() and having slope
and having slope ![]()
∴ ![]()
Proceeding in this way we get the general formula
![]()
This is called Euler’s algorithm:
Note:
- Since
 and
and  , the above formula can be simply written as
, the above formula can be simply written as 
- The draw back of this method is that it is either too slow (in case h is small) or too inaccurate (in case h is not small).
- The computed y’s will deviate more and more from the true y’s as we proceed further along X-axis, due to cumulative rounding errors.
These drawbacks have led to a modification of Euler’s method aiming at more accurate results.
We start with the tangent ![]() at
at ![]() .
.
Let the ordinate at ![]() intersect the tangent
intersect the tangent ![]() at Q, where
at Q, where ![]()
We find the slope at Q.
ie 
We draw the line through Q with this as slope and let this line be ![]() .
.
We then draw the line L through ![]() parallel to
parallel to ![]() .
.

This line L is taken as an approximation to the curve in the interval ![]() .
.
Equation of L is ![]()
When ![]()
ie. ![]()
Proceeding this way, in general we have
![]()
where ![]()
Note:
(1) The above formula is one version of the modified formula. It gives a better approximation. In this method we took average of points.
(2) Another version of Euler modified formula is given in terms of the average of the slopes at the end points of an interval.
That is ![]()
![]()
This formula is also referred as improved Euler formula by some authors.
(3) The improved and modified Euler’s methods give a better approximation to ![]() than Euler’s formula.
than Euler’s formula.
(4) Local error in improved and modified methods are ![]()
WORKED EXAMPLES
Example 1
Using Euler’s method find y for x = 0.1 given ![]()
Solution
Given equation is ![]()
![]()
We shall divide ![]() into
into ![]() parts with
parts with ![]()
![]()
Euler’s algorithm is ![]()
![]()
When ![]()

When n = 1, y2 = y1 + hf (x1,y1), x1 = x0 + h = 0.05
= 1.05 + (0.05) 
= 1.05 + (0.05) ![]()
= 1.05 + 0.05 ![]()
∴ ![]()
Example 2
Apply modified Euler’s method to find y(0.2) and y(0.4) given y = x2 + y2, y(0) = 1 by taking h = 0.2.
Solution
Given equation is y′ = x2 + y2 , y(0) = 1
∴ f (x, y) = x2 + y2, and x0 = 0, y0 = 1, h = 0.2
Modified Euler’s formula is
![]()
Putting n = 0, we get, ![]()
![]()
But f (0,1) = 0 + 1 = 1
∴ ![]()
![]()
∴ y(0.2) = 1.244
Now x1 = 0.2, y1 = 1.244
Putting n = 1, we get,
![]()
![]()
![]()
![]()
![]()
∴ ![]()
Thus ![]()
Example 3
Solve ![]() by Euler’s modified method and find the values of y(0.2), y(0.4) and y(0.6) by taking h = 0.2.
by Euler’s modified method and find the values of y(0.2), y(0.4) and y(0.6) by taking h = 0.2.
Solution
Given ![]()
![]()
![]()
Modified Euler formula is
![]()
Putting n = 0, we get
![]()
But ![]()
∴ ![]()
![]()
![]()
![]()
∴ ![]()
Now ![]()
Putting ![]() we get
we get
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Now ![]()
Putting ![]() we get
we get
![]()
![]()
![]()
![]()
![]()
Thus ![]()
Example 4
Using modified Euler’s method solve given that ![]() find y(0.2).
find y(0.2).
Solution
Given equation is ![]()
![]() Take
Take ![]()
We shall find y(0.2) in two steps.
Modified Euler’s formula is
![]()
Putting ![]() we get,
we get,
![]()
![]()
![]()
![]()
![]()
Now ![]() ie.
ie.![]()
Putting ![]() we get,
we get,
![]()
![]()
![]()
![]()
![]()
∴ ![]()
Exercises 9.1
- Use Taylor’s series method solution to solve
 Find y(0.1), y(0.2), y(0.3), y(0.4) 2.
Find y(0.1), y(0.2), y(0.3), y(0.4) 2. - Use Taylor’s series method to find y at x = 0.1, 0.2 given

- Use Taylor’s series method to find y at x = 0.1 if

- Use Taylor’s series method to solve
 with y(0) = 2 and find y(0.1), y(0.2), y(0.3).
with y(0) = 2 and find y(0.1), y(0.2), y(0.3). - By Taylor’s method find the solution with 3 terms for the initial value problem
 and obtain y(1.1), y(1.2).
and obtain y(1.1), y(1.2). - Using Taylor’s series method find y(0.1) and y(0.2) given
 y(0) = 1.
y(0) = 1. - Use Euler’s method to find y(0.2), y(0.4) from
 y(0) = 1 with h = 0.2.
y(0) = 1 with h = 0.2. - Given
 taking h = 0.02 and y(0) = 1, find y when x = 0.1.
taking h = 0.02 and y(0) = 1, find y when x = 0.1. - Using Euler’s modified method find y(0.2), y(0.4), y(0.6) given
 y(0) = 1.
y(0) = 1. - Using Euler’s modified method compute y(0.1) with h = 0.1 from

- Consider the initial value problem
 using the modified Euler’s method, find y(0.2).
using the modified Euler’s method, find y(0.2). - Using modified Euler’s method solve, given that y ′ = 1 − y, y(0) = 0 find y(0.1), y(0.2) and y(0.3).
- By modified Euler’s method find y(1.2), given
 y(1) = 0, h = 0.2.
y(1) = 0, h = 0.2. - Solve
 given y(1) = 0, and find y(1.1) and y(1.2) by Taylor’s series method.
given y(1) = 0, and find y(1.1) and y(1.2) by Taylor’s series method. - Using Modified Euler’s method find y(0.1) and y(0.2) given

Answers 9.1
- 0.9052, 0.8213, 0.7492, 0.6897
- 0.9003
- y(1.1) = 1.225; y(1.2) = 1.512
- 1.2, 1.48
- 1.218, 1.467, 1.737
- y(0.2) = 0.828, taking h = 0.2
- y(1.2) = −0.2735
- y(0.1) = 1.1105, y(0.2) = 1.2503
- 0.3487, 0.8113
- 2.1103, 2.2430, 2.4011
- 1.0665, 1.1672
- 1.0928
- y(0.1) = 1.0955
- 0.095, 0.18098, 0.25878
- y(1.1) = 0.1104, y(12) = 0.2424
9.3 RUNGE-KUTTA METHOD (R-K METHOD)
Runge-Kutta methods are more accurate than the earlier methods we have seen. Two German mathematicians, Runge and Kutta developed algorithms to solve a differential equation efficiently. The advantage of this method is that it requires only values of the function at some specified points. These methods agree with Taylor series expansion upto the terms of hr, where r is the order of the Runge-Kutta method and it differs from method to method.
In these methods two or more estimates of Δy, the increment in y, are computed and a linear combination of these estimates are used to determine Δy and hence the next value of y, is y(x + h) = y(x) + Δy. Since the derivations are complicated we shall state here only the algorithms to solve ![]()
1. First-order Runge-Kutta method
Euler’s method is y(x + h) = y(x) + hf(x, y)
![]()
In general, ![]()
2. Second-order Runge-Kutta method

![]()
Note that Δy is the mean of k1 and k2. Some times Δy is taken as k2, in which case second order Runge-Kutta method is modified Euler method.
3. Third-order Runge-Kutta method

Then ![]()
Note that Δy is the weighted mean of k1, k2, k3
4. Fourth-order Runge-Kutta method
The fourth order Runge-Kutta method is most widely used and is popular and so it is referred to as the Runge-Kutta method. In problems we use fourth-order method unless otherwise specified.
Fourth-order algorithm is

and ![]()
![]()
Note that Δy is the weighted mean of k1, k2, k3, k4.
WORKED EXAMPLES
Example 1
Using Runge-Kutta method of Fourth order solve ![]() with y(0) = 1 at x = 0.2, 0.4.
with y(0) = 1 at x = 0.2, 0.4.
Solution
Given ![]()
Then ![]()
Required the values of y when x = 0.2 and x = 0.4
The fourth-order Runge-Kutta method is


Put n = 0 to find y1
Then, k1= hf(x0,y0) 
![]()
 = 0.2f [0.1, 1 + 0.1]
= 0.2f [0.1, 1 + 0.1]
= 0.2f [0.1, 1.1]




![]()
Now ![]()
Put n = 1 to find y2
Then

Similarly


![]()
![]()
Thus y(0.2) = 1.196, y(0.4) = 1.3752
Example 2
Apply Runge-Kutta method to find approximate value of y for x = 0.2 in steps of 0.1 if ![]() given that y = 1 when x = 0.
given that y = 1 when x = 0.
Solution
Given ![]()
Then ![]()
Required y(0.2). Since we have to compute with h = 0.1, first we find y(0.1) and then y(0.2).
Fourth order Runge-Kutta formula is

Put n = 0 to find y1
Then ![]()


![]()

∴ ![]()
Now ![]()
Put n = 1 to find y2
Then ![]()

![]()


∴ ![]()
Thus y(0.1) = 1.1165 and y(0.2) = 1.2736
Example 3
Using Runge-Kutta method of order 4, find y(0.2) for the equation ![]() Take
Take ![]()
Solution
Given equation is ![]()
Then ![]()
Required y(0.2)
Fourth order Runge-Kutta formula is
![]()
![]()
![]()
![]()
![]()
![]()
Put ![]() to find
to find ![]()
∴ ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
∴ ![]()
Example 4
Apply Runge-Kutta method to ![]() and find y(0.2) with
and find y(0.2) with ![]() .
.
Solution
Given ![]()
Then, ![]()
Fourth order Runge-Kutta formula is
![]()
![]()
![]()
![]()

Put ![]() to find
to find ![]()
Then ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
∴ ![]()
Now ![]()
Put n = 1 to find y2
Then ![]()
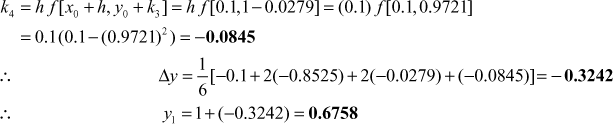
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
∴ ![]()
∴ ![]()
9.4 RUNGE-KUTTA METHOD FOR THE SOLUTION OF SIMULTANEOUS EQUATIONS AND SECOND ORDER EQUATIONS
We have seen Runge-Kutta method for solving first order differential equations. We shall now describe the solution of second order differential equations by Runge-Kutta method. A second order differential equation can be reduced to a system of simultaneous first order equations. These first order equations can be solved by Runge-Kutta method.
9.4.1 Runge-Kutta Method for Simultaneous Equations
Consider the system of equations
![]()
![]()
where ![]() is independent variable and
is independent variable and ![]() are dependent variables.
are dependent variables.
Starting at ![]() the increments
the increments ![]() and
and ![]() in y and z for the increment h in x are computed by means of the formulae.
in y and z for the increment h in x are computed by means of the formulae.

Then ![]()
Thus we get ![]() where
where ![]()
To find ![]() we repeat the above algorithm replacing
we repeat the above algorithm replacing ![]() by
by ![]()
ie. we start with ![]()
WORKED EXAMPLES
Example 1
Solve the system of differential equations ![]() for
for ![]() , using fourth order Runge-Kutta method with the values
, using fourth order Runge-Kutta method with the values ![]()
Solution
Given system of equations is

and ![]() and h = 0.3
and h = 0.3
Here ![]()
Required the values of y and z when ![]()








Now the increments,
 and
and 
∴ ![]()
Example 2
Using Runge-Kutta method of fourth order, find the approximate values of x and y at ![]() for the following system,
for the following system, ![]()
Solution
Given system of equations are

and ![]()
Here t is the independent variable and x, y are dependent variables
Here ![]()
![]()
Required the values of x and y when ![]()
∴ 

Now the increments,



9.4.2 Runge-Kutta Method for Second Order Equations
Consider the second order differential equation ![]() given
given ![]()
![]()
Put ![]() Hence
Hence ![]()
So, the second order differential equation is reduced to two simultaneous first order equations
![]() and
and ![]()
∴ ![]() and
and ![]()
Here ![]() x is independent variable, y and z are dependent variables.
x is independent variable, y and z are dependent variables.
These equations can be solved by using the algorithm in 9.4.1.
WORKED EXAMPLES
Example 3
Given y ≤ + xy ¢ + y = 0, y(0) = 1, y ¢(0) = 0 find the value of y (0.1) by R-K method of fourth order.
Solution
Given equation is ![]()
Put ![]()
![]()
∴ the equation is reduced to a system of first order simultaneous equations.
![]() and
and ![]()
Here ![]() and
and ![]()
To find y (0.1)
![]()
By Runge-Kutta method,
![]()





Now

∴ ![]()
∴ ![]()
Example 4
Consider the second order initial value problem ![]() with y(0) = -0.4 and
with y(0) = -0.4 and ![]() . Using fourth order Runge-Kutta method, find y(0.2).
. Using fourth order Runge-Kutta method, find y(0.2).
Solution
Given equation is ![]() y(0) = −0.4 and y′(0) = -0.6
y(0) = −0.4 and y′(0) = -0.6
![]() Assume t = x, x is independent variable, y and z are dependent variables
Assume t = x, x is independent variable, y and z are dependent variables
Put y ′ = z, then ![]()
∴ the equation is ![]()
That is the equation is reduced to a system of first order simultaneous equations.
![]() and
and ![]()
Here ![]()
To find y(0.2)
![]()
By Runge-Kutta method,
![]()






Now
![]()
![]()
![]()
∴ ![]()
![]()
Example 5
Given ![]() Evaluate y (0.1) using Runge-Kutta method.
Evaluate y (0.1) using Runge-Kutta method.
Solution
Given ![]()
∴ ![]()
Put y′
That is the given equation is reduced to a system of first order simultaneous equations
![]()
Here ![]() and
and ![]()
To find y(0.1)
we have ![]() and h = 0.1
and h = 0.1
By Runge-Kutta method,
![]()
![]()




∴ ![]()
∴ ![]()
Exercises 9.2
- Solve, using fouwwrth order Runge-Kutta method
 . Evaluate the value of y when x = 1.1 [Take h = 0.5].
. Evaluate the value of y when x = 1.1 [Take h = 0.5]. - Using Runge-Kutta method of fourth order, solve for y at x = 1.2, 1.4 from
 with y(1) = 0.
with y(1) = 0. - Find y(0.8) given that
 by using Runge-Kutta method of fourth order. Take h = 0.1.
by using Runge-Kutta method of fourth order. Take h = 0.1. - Find y(0.3) given that
 by taking h = 0.1, using Runge-Kutta method.
by taking h = 0.1, using Runge-Kutta method. - Apply Runge-Kutta method of order 4 to find y(0.2) given that

 taking h = 0.1.
taking h = 0.1. - Compute y(0.1) and y(0.2) by Runge-Kutta method of 4th order for the differential equation

- Given
 find y for x = 0.1, 0.2, 0.3 by R-K Method.
find y for x = 0.1, 0.2, 0.3 by R-K Method. - Given the equation
 by R.K method find y at x = 0.1, 0.4.
by R.K method find y at x = 0.1, 0.4. - Given
 find y(1.1) and y(1.2) using R-K method.
find y(1.1) and y(1.2) using R-K method. - Use the Runga-Kutta method to determine the approximate value of y at x = 0.1 if y satisfies the differential equation
 with y(0) =1,
with y(0) =1,
- Using Runge-Kutta method solve
 and find y(0.2), y′(0.2) [Take h = 0.2].
and find y(0.2), y′(0.2) [Take h = 0.2]. - Solve using Rung-Kutta method
 and find y(0.1).
and find y(0.1). - Find y(0.1) by Runge-Kutta method

- Given that
 Compute y(0.2), y(0.4), y(0.6) by Runge-Kutta method of fourth order.
Compute y(0.2), y(0.4), y(0.6) by Runge-Kutta method of fourth order. - Solve the system of differential equations
 for
for  , using 4th order Runge-Kutta method with initial values
, using 4th order Runge-Kutta method with initial values 
- Solve the system
 for
for  Correct to 4 decimal places, given
Correct to 4 decimal places, given 
Answers 9.2
- 0.9958, (2) 0.1402, 0.2705
- 1.8763; 2.0142 (4) y(0.1) = 0.9006, y(0.2) = 0.8046, y(0.3) = 0.7144
- 2.5005 (6) 1.1169, 1.2774
- 1.0911, 1.1677, 1.2352 (8) 1.1832, 1.3416
- 2.2213, 2.4914 (10) y(0.1) = 1.0053
- y(0.2) = 0.9801,
 = –0.178 (12) y(0.1) = 2.9399
= –0.178 (12) y(0.1) = 2.9399 - y(0.1) = 0.2542 (14) 2.4432; 2.9903; 3.6805
 (16)
(16) 
9.5 MILNE’S PREDICTOR–CORRECTOR METHOD
Consider the differential equation ![]() with y(x0) = y0.
with y(x0) = y0.
Divide the range of x into a number of subintervals of equal width h.
If xi and xi + 1 are consecutive points then xi + 1 = xi + h.
By Euler’s formula we get
yi + 1 = yi + hf (xi, yi), i = 1, 2, 3, ...(1)
By one form of Euler’s modified formula, we get
![]() (2)
(2)
The value ![]() is first estimated by (1) and this value is substituted in the R.H.S of (2).
is first estimated by (1) and this value is substituted in the R.H.S of (2).
Then we get a better approximation of ![]() from (2). This value is again substituted in (2) to find a still better value of
from (2). This value is again substituted in (2) to find a still better value of ![]() .
.
This process is repeated until we get two consecutive approximations of ![]() are almost same. This method of refining an initially rough estimate by means of a more accurate formula is called a predictor-corrector method.
are almost same. This method of refining an initially rough estimate by means of a more accurate formula is called a predictor-corrector method.
The formula (1) is called the predictor formula and formula (2) is called the corrector formula.
Consider ![]() with y(x0) = y0.
with y(x0) = y0.
We know Newton’s forward formula is
![]()
where ![]()
Replace y by y![]() =
= ![]() , then
, then
![]() (1)
(1)
Integrating w.r.to x in the interval [x0, x0 + 4h], we get

∴ 
[![]() when x = x0, u = 0, x = x0 + 4h; u = 4]
when x = x0, u = 0, x = x0 + 4h; u = 4]

![]()
![]()
[neglecting higher order differences]
![]()
∴ ![]()
Since ![]() are any 5 consecutive values of x, the above equation can be written generally as
are any 5 consecutive values of x, the above equation can be written generally as
![]() (2)
(2)
This is called Milne’s Predictor formula.
Note that this formula can be used to predict the value of y4 when the values of ![]() are known.
are known.
To obtain a corrector formula, integrating (1) w.r.to x in the interval ![]() , we get
, we get

∴ 
∴ ![]()
∴ ![]()
![]()
[neglecting higher powers]
∴ ![]()
Since ![]() are consecutive values of x the above relation can be written generally as
are consecutive values of x the above relation can be written generally as
![]() (3)
(3)
This is known as Milne’s Corrector formula.
Note:
- In problems if the first 4 values of y are not given we have to determine them by using Taylor’s series or Euler’s or Runge-Kutta method. Usually, these values will be given.
- To apply Milne’s Predictor-Corrector method, we need four starting values of y. Hence this method is a multi-step method.
WORKED EXAMPLES
Example 1
Solve ![]() y(0) = 1, y(0.1) = 1.06, y(0.2) = 1.12, y(0.3) = 1.21. Compute y (0.4), using Milne’s Predictor Corrector formula.
y(0) = 1, y(0.1) = 1.06, y(0.2) = 1.12, y(0.3) = 1.21. Compute y (0.4), using Milne’s Predictor Corrector formula.
Solution
Given equation is ![]()
Here f(x,y) = ![]()
Also given x0 = 0, x1 = 0.1, x2 = 0.2, x3 = 0.3,
and y0 = 1, y1 = 1.06, y2 = 1.12, y3 = 1.21
Required y(0.4) = y4 at x4 = 0.4
Milne’s Predictor formula is
![]() (1)
(1)
Putting n = 3, we get
![]() (2)
(2)
we have ![]()
∴ 
![]()

![]()

![]()
Substituting in (2), we get
![]()
This is the Predictor value.
The accuracy of the value may be increased using corrector formula.
Milne’s corrector formula is
![]() (3)
(3)
Put n = 3 in (3), then
![]() (4)
(4)
Since ![]() is not known, we find y′4.
is not known, we find y′4.
Now 
![]()
Substituting in (4) we get
![]()
![]()
![]() the corrector value
the corrector value![]()
Example 2
Given ![]() compute y (4.4) using Milne’s method.
compute y (4.4) using Milne’s method.
Solution
Given equation is ![]()
![]()
![]()
Also given x0 = 4, x1 = 4.1, x2 = 4.2, x3 = 4.3,
and y0 = 1, y1 = 1.0049, y2 = 1.0097, y3 = 1.0143
Required y (4.4) = y4 at x4 = 4.4
Milen’s Predictor formula is
![]() (1)
(1)
Putting n = 3 in (1) we get, ![]()
we have ![]()
∴ 

and 
Substituting in (2), we get
∴ ![]()
![]()
This is the predictor value of y4.
An improved value of y4 may be obtained by the corrector formula.
![]() (3)
(3)
Putting n = 3 in (3) we get, ![]() (4)
(4)
But ![]() is not known, so we find y′4.
is not known, so we find y′4.
Now 
∴ ![]()
![]()
![]() the corrector value is
the corrector value is ![]()
Example 3
Given y’ = xy + y2, y(0) = 1, find y(0.1) by Taylor’s method, y(0.2) by Euler’s method, y(0.3) by Runge-Kutta method and y(0.4) by Milne’s method.
Solution
Given equation is ![]()
Here f(x,y) = xy + y2
Also given ![]()
![]() y1 = y(0.1) is required by Taylor’s series method.
y1 = y(0.1) is required by Taylor’s series method.
By Taylor’s formula,
![]() (1)
(1)
we have ![]()

At (x0, y0) = (0, 1),

![]()
![]()
Next to find y2 = y(0.2), we use Euler’s method

By Euler’s formla,

![]()
Next to find ![]() We use Runge-Kutta method
We use Runge-Kutta method
we have ![]()
By R-K formula, ![]()

where
![]()
Now

![]()



Now we know 4 values

We have to find y4 by Milne’s method.
Milne’s Predictor formula is
![]() (1)
(1)
Putting n = 3 in (1), we get, ![]()
we have ![]()
∴ ![]()

∴ ![]()
∴ ![]()
This is the predictor value of y4.
To find the corrector value we use Milne’s corrector formula.
![]() (2)
(2)
Putting n = 3 in (2), we get, ![]()
But ![]() is not known and so we find
is not known and so we find ![]()
Now ![]()
![]()
Since the Predictor and corrector values of y4 are not close to each other, we improve the values of y4 repeating the corrector process taking y4 = 1.7944 as predictor value.
∴ Corrector value is ![]()
But ![]()
![]()
∴ the corrector value is ![]()
∴ the value for two decimal places is ![]()
Example 4
Given ![]() y(0.4) = 2.452, y(0.6) = 3.023. Compute y(0.8) by Milne’s predictor-corrector method taking h = 0.2.
y(0.4) = 2.452, y(0.6) = 3.023. Compute y(0.8) by Milne’s predictor-corrector method taking h = 0.2.
Solution
Given equation is ![]()
Here f(x,y) = x3 + y and h = 0.2
Also given
![]()
y4 is required by Milne’s method.
Milne’s Predictor formula is ![]() (1)
(1)
Putting n = 3 in (1), we get ![]()
we have ![]()

⇒ ![]()
This is the Predictor value.
We shall now find the corrector value.
Milne’s Corrector formula is
![]() (2)
(2)
Putting n = 3, we get ![]()
But ![]() is not known and so we find y′4.
is not known and so we find y′4.
Now ![]()
∴ ![]()
Since the Predictor and corrector values differ much, we repeat the process taking y4 = 3.7954 as the Predictor value.
Corrector value is ![]()
But ![]()
∴ ![]()
![]()
Again ![]()
where ![]()
∴ ![]()
![]()
Example 5
Use Taylor series method to solve ![]() at
at ![]() continue the solution of the problem at
continue the solution of the problem at ![]() using Milne’s method.
using Milne’s method.
Solution
Given equation is ![]()
Here ![]()
We have to find the values of y at ![]()
In the usual notation the corresponding y’s are denoted by ![]()
Taylor series algorithm is
![]() (1)
(1)
where ![]() is the rth derivative of y at
is the rth derivative of y at ![]()
∴ ![]() (2)
(2)
 (3)
(3)
At (x0,y0) = (0,1) ![]()
![]()
![]()
![]()
∴ ![]()
Putting ![]() we get
we get ![]()
∴ ![]()
∴ ![]()
Put ![]() in (1), we get
in (1), we get ![]() (4)
(4)
At ![]()
![]()
![]()
![]()
Substituting in (4), we get, ![]()
![]()
Thus we have 4 values ![]()
![]()
Now, using Milne’s Predictor corrector formula we have to find ![]()
Milne’s Predictor formula is ![]() (5)
(5)
Putting ![]() in (5), we get
in (5), we get ![]()
We have ![]() and
and ![]() is not known. We shall find it.
is not known. We shall find it.
Now ![]()
![]()
∴ ![]()
![]()
This is the Predictor value.
We shall now find the corrector value of y3.
Milne’s Corrector formula is ![]() (6)
(6)
Putting ![]() in (6), we get
in (6), we get ![]()
Now ![]() is not known and we find
is not known and we find ![]()
Now ![]()
∴ ![]()
Hence ![]()
9.6 ADAM’S PREDICTOR AND CORRECTOR METHOD
We have seen Milne’s method is derived by using Newton’s forward difference formula. But Adam’s method is derived using Newton’s backward difference formula.
We shall state the formulae without proof.
To solve ![]() with
with ![]() the predictor formula is
the predictor formula is
![]()
Corrector formula is
![]()
Note: To apply the predictor formula, we need four starting values of y which will be usually given, otherwise y can be calculated by any of the methods we have seen. Fourth order Runge-Kutta method is the most suitable one. It is found that Adam’s method is more stable.
It is also known as Adam-Bashforth method.
WORKED EXAMPLES
Example 1
Evaulate y (1.4) given ![]()
![]()
![]() by Adam’s-Bash forth formula.
by Adam’s-Bash forth formula.
Solution
Given equation is ![]()
Here ![]()
given ![]()
and ![]()
Required ![]() at
at ![]()
Adam’s Predictor formula is
![]()
Putting ![]() we get
we get
![]() (1)
(1)
we have ![]()
∴ 

![]()

![]()

Substituting in (1), the predictor value is

Thus the Predictor value is ![]()
We improve this by using Adam’s corrector formula
![]()
Putting ![]() we get
we get
![]()
Here ![]() is not known and we shall find it
is not known and we shall find it
Now 
![]()
![]()
Now substituting in the corrector formula (2) we get
![]()
![]()
![]()
![]() the corrector value is
the corrector value is ![]()
Example 2
Given ![]() eval uate y(1.4) by Adam-Bashforth method.
eval uate y(1.4) by Adam-Bashforth method.
Solution
Given equation is ![]()
Here ![]()
Also given ![]()
and ![]()
Required ![]()
Adam’s Predictor formula is
![]()
Putting![]() we get
we get
![]() (1)
(1)
we have ![]()
∴ ![]()
![]()
![]()
![]()
Substituting in (1), we get the Predictor value
![]()
= 1.979 + 0.004167[142.3909]
![]()
![]() the Predictor value is
the Predictor value is ![]()
We improve this by the Adam’s corrector formula
![]() (2)
(2)
Putting ![]() we get
we get ![]()
Here ![]() is not known so we shall find it
is not known so we shall find it
![]()
∴ the corrector value is
![]()
![]()
![]()
![]() the corrector value is
the corrector value is ![]()
Example 3
Find y(0.1), y(0.2), y(0.3) from ![]() by using Runge-Kutta method of order 4 using step value h = 0.1 and then find y(0.4) by Adam’s method with y(0) = 1.
by using Runge-Kutta method of order 4 using step value h = 0.1 and then find y(0.4) by Adam’s method with y(0) = 1.
Solution
The given equation is ![]()
Here f(x,y) = x − y2 and h = 0.1
Also given x0= 0, y0= 1
We shall find y(0.1), y(0.2), y(0.3) by 4th order Runge-Kutta method.
By Runge–Kutta method

![]()
![]()
Starting with y0, we shall find y1
Put n = 0, ![]() and
and ![]()
![]()

![]()
![]() to find y2 ie. to find y2 when x2 = 0.2.
to find y2 ie. to find y2 when x2 = 0.2.
![]()



Put n = 2 to find y3
![]()


![]()

∴ ![]()
We shall now find y4 = y(0.4) by Adam’s Predictor-Corector formula
Adam’s Predictor formula is
![]()
Putting ![]() we get
we get
![]() (1)
(1)
Now ![]()
![]()
![]()
![]()
∴ ![]()
![]()
![]()
Adam’s Corrector formula is
![]()
Putting n = 3, we get
![]() (2)
(2)
But ![]()
Substituting in (2), we get the corrector value
![]()
![]()
![]() the corrector value of
the corrector value of ![]()
Example 4
Consider ![]()
- Using the modified Euler method find y(0.2).
- Using R-K fourth order method find y(0.4) and y(0.6).
- Using Adamww-Bashforth Predictor-Corrector method find y(0.8).
Solution
Given equation is ![]()
Here f(x, y) = ![]()
Also given ![]()
- (i) By modified Euler method, we shall find y(0.2)
Modified Euler formula is
![]()
Putting n = 0, we get ![]()
![]()
![]()
![]()
![]()
∴ ![]()
When ![]()
- (ii) Now we shall find y(0.4) and y(0.6) by 4th order R-K method
![]()
where ![]() ,
, 
 ,
, ![]()
![]()
Since y1 is known we shall find y2
![]() Put n = 1, Then y2 =
Put n = 1, Then y2 = ![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
∴ ![]()
∴ ![]()
∴ ![]()
∴ ![]()
Now ![]()
![]()
![]()
![]()
![]()
Now ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
ie. when x3 = 0.6, y3 = 1.6470
- (iii) Given

![]()
We have to find y4 when x4 = 0.8, by Adam’s Predictor-Corrector method.
Adam’s Predictor formula is
![]()
Putting n = 3, we get
![]() (1)
(1)
Since ![]()
![]()
![]()
![]()
![]()
Substituting in (1), we get the Predictor value is
![]()
![]()
Adam’s Corrector formula is
![]()
Putting n = 3, we get
![]() (2)
(2)
Since ![]() is not known, we shall find it.
is not known, we shall find it.
Now ![]()
Substituting in (2), we get the Corrector value

Thus the corrector value is ![]()
Exercises 9.3
- Solve numerically the differential equation
 taking the starting values y(0.2) = 2.0933, y(0.4) = 2.1755, y(0.6) = 2.2493. Find the values of y(0.8), using Milne’s Predictor-corrector method.
taking the starting values y(0.2) = 2.0933, y(0.4) = 2.1755, y(0.6) = 2.2493. Find the values of y(0.8), using Milne’s Predictor-corrector method. - Solve
 compute y(0.4) and y(0.5) by Milne’s method.
compute y(0.4) and y(0.5) by Milne’s method. - Apply Milne’s method to solve
 and find y(1).
and find y(1). - 2, y(0.5) = 2.636, y(1) = 3.595 and y(1.5) = 4.968.
- Using Milne’s method find y(0.4) given

- Use Taylor’s series to find the starting values.
- Compute the first 3 steps of the initial value problem
 by Taylor’s series method and next step by Milne’s method with step length h = 0.1.
by Taylor’s series method and next step by Milne’s method with step length h = 0.1. - Given
 find y(0.1), y(0.2), y(0.3) by Taylor’s method and find y(0.4) by Milne’s predictor corrector method.
find y(0.1), y(0.2), y(0.3) by Taylor’s method and find y(0.4) by Milne’s predictor corrector method. - Determine the value of y(0.4) using Milne’s method given
 y(0) = 1; use Taylor series to get the values of y(0.1), y(0.2) and y(0.3).
y(0) = 1; use Taylor series to get the values of y(0.1), y(0.2) and y(0.3). - Given
 y(0) = 1, y(0.1) = 1.01, y(0.2) = 1.022, y(0.3) = 1.023. Using Adam’s method find y(0.4).
y(0) = 1, y(0.1) = 1.01, y(0.2) = 1.022, y(0.3) = 1.023. Using Adam’s method find y(0.4). - Using Adam-Bashforth method find y(4.4) given 5xy′ + y2 = 2, y(4) = 1, y(4.1) = 1.0049, y(4.2) = 1.0097 and y(4.3) = 1.0143.
- Find y at x = 0.4 if
 with y(0) = 2, y(0.1) = 2.01, y(0.2) = 2.04, y(0.3) = 2.09 by Adam-Bashforth method.
with y(0) = 2, y(0.1) = 2.01, y(0.2) = 2.04, y(0.3) = 2.09 by Adam-Bashforth method.
Answers 9.3
(1) yp(0.8) = 2.3162, yc(0.8) = 2.3164 (2) yp(0.4) = 1.3415, yc(0.4) = 1.3416,
yp(0.5) = 1.4141, yc(0.5) = 1.4142
(3) yc(1) = 1.6505, (4) yp(2) = 6.8710, yc(2) = 6.8732
(5) yp(0.4) = 2.5885, (6) x1 = 0.1, x2 = 0.2, x3 = 0.3, y1 = 0.954, y2 = 0.915,
yc(0.4) = 2.5885 y3 = 0.883, y4,c = 0.856, y4,c = 0.857
(7) 1.0047, 1.01813, 1.03975, (8) y(0.1) = 1.1167, y(0.2) = 1.2767,
y(0.4) = 1.0709 y(0.3) = 1.5023, y(0.4) = 1.8370
(9) yp = 1.0408, yc = 1.0410, (10) yp = 1.0186, yc = 1.0187
yp = 2.1616, yc = 2.1615
9.7 PICARD’S METHOD
9.7.1 Picard’s Method of Successive Approximations
We have seen Taylor’s series method gives the solution of an ordinary differential equation as a series. Picard method is also a method which gives the solution as a series.
Consider the first order differential equation.
![]()
We have ![]()
Integrating from ![]() to x, the corresponding y values are y0 and y.
to x, the corresponding y values are y0 and y.
∴
∴
∴  (1)
(1)
This equation is complicated because the unknown function y appears inside the integral as well as outside.
This type of equation is called an integral equation and it is solved by successive approximation or iteration.
The first approximation of y is obtained by putting y0 for y in the integrand.
∴ ![]()
Now the second approximation is obtained by putting ![]() in the integrand of (1)
in the integrand of (1)
∴ ![]()
The process is repeated and we get the nth approximation ![]() .
.
This method is known as picard’s method.
Note:
- The sequence of approximations
 converges to the solution
converges to the solution  of
of  if the function
if the function  is bounded in the neighbourhood of
is bounded in the neighbourhood of  and satisfies
and satisfies - Lip schitz condition
- i.e.
 , where k is a constant.
, where k is a constant. - In practice this method is not convenient if the integrand is complicated.
WORKED EXAMPLES
Example 1
Given ![]() Find the value of y when
Find the value of y when ![]() by picard’s method. Check the result with the exact value.
by picard’s method. Check the result with the exact value.
Solution
Given equation is ![]()
Here ![]()
By Picard’s method,
![]() (1)
(1)
First approximation is ![]()

∴ ![]()
Second approximation is
∴ 
Third approximation is

Fourth approximation is

∴ 
The fifth approximation is

When x = 0.1, ![]()

When x = 0.2,

When ![]()
When ![]()
The actual solution of the first order linear equation ![]() is
is ![]()
When ![]()
When ![]()
Comparing with the actual value, we find that the computed value of Picard’s method is correct upto last decimal.
Example 2
Use picards method to approximate the value of y when ![]() given that
given that ![]() when
when ![]() and
and ![]()
Solution
Given equation is ![]()
Here ![]()
Picards formula is

The first approximation is
The Second approximation is

∴ 
The third approximation involves squares of ![]() which is a big expression.
which is a big expression.
So we stop with ![]() ,
,
When x = 0.1 
When ![]()
Example 3
Use Picard’s method to find the value of y when ![]() given
given ![]()
Solution
Given ![]() and
and ![]() when
when ![]()
Here ![]()
Picards formula is ![]()
The first approximation is 
The second approximation is


This integral cannot be evaluated in closed form. Hence we cannot proceed. So, we take y(1) as the approximate solution.
When ![]()
∴ when ![]()
Exercises 9.4
- Using picards method solve
 with
with  upto third approximation. Hence evaluate y when
upto third approximation. Hence evaluate y when 
- Find the solution of
 which passes through the point (0, 1). Find y correct to three decimal places when
which passes through the point (0, 1). Find y correct to three decimal places when  and
and 
- Find the solution with
 by picards methods.
by picards methods. 
Answers 9.4
 (2)
(2) 

SHORT ANSWER QUESTIONS
- State Taylor series algorithm for the first order differential equation.
- Write the merits and demerits of the Taylor’s method of Solution.
- Write down the Euler algorithm to solve the differential equation

- Given y′ = x + y, y(0) = 1 find y(0.1) by Euler’s method.
- State modified Euler algorithm to solve y′ = f(x, y), y(x0) = y0.
- State the modified Euler’s formula to solve y′ = f(x, y), y(x0) = y0 at x = x0 + h.
- Write the Runge-Kutta algorithm of 4th order to solve with y(x0) = y0.
- State the special advantage of Runge-Kutta method over Taylor series method.
- State the difference between single step and multistep methods in solving ordinary differential equations numerically?
- What is a predictor-corrector method of solving a differential equation

- State Milne’s Predictor corrector formula.
- How many pairs of prior values are required to predict the next value in Milne’s method?
- State Milne’s Predictor-corrector formula to solve




 at
at 
- State the Taylor series formula to find
 for solving
for solving 
- Write down the modified Euler’s formula for ordinary differential equation.
- By Taylor series method find
 given that
given that  and
and 
- Find the Taylor series expansion upto x3 term satisfying

- Using modified Euler’s method, evaluate
 if
if 
- Write the Adam’s predictor-corrector formula.
- Using Euler’s modified method, find y at
 if
if
- Using Euler’s method find y at
 if
if 
- Using Taylor’s series method find
 given that
given that  ,
, 
- Find
 for the equation
for the equation  given that
given that  by using Euler’s method.
by using Euler’s method.
