
Now that the device is connected, you'll need to configure access via the software. Following are the steps:
- In order to access the compass capability, you'll need to enable the I2C library on Raspberry. The first step in enabling the analog-to-digital converter (ADC) is to enable the I2C interface. The I2C interface is a synchronous serial interface and provides more performance than an asynchronous Rx/Tx serial interface. The SCL data line provides a clock while the data flows on the SDA line. The bus also provides addressing so that more than one device can be connected to the master device at the same time. To enable this bus, run
sudo raspi-configand select the 8 Advanced Options, as follows: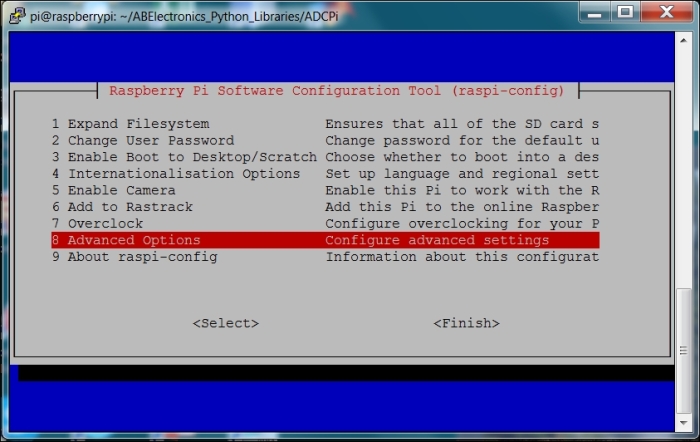
- Then go to the A7 I2C selection and enable the I2C, as shown in the following:

- Make all the selections to enable the I2C interface and load the library, and then reboot Raspberry Pi.
- You'll also need to edit the
/etc/modulesfile and add the following two lines:
- Reboot Raspberry Pi. Install the I2C toolkit by typing
sudo apt-get install i2c-tools. You can see whether I2C is enabled by typingsudo i2cdetect -y 1, and then you should see something like this: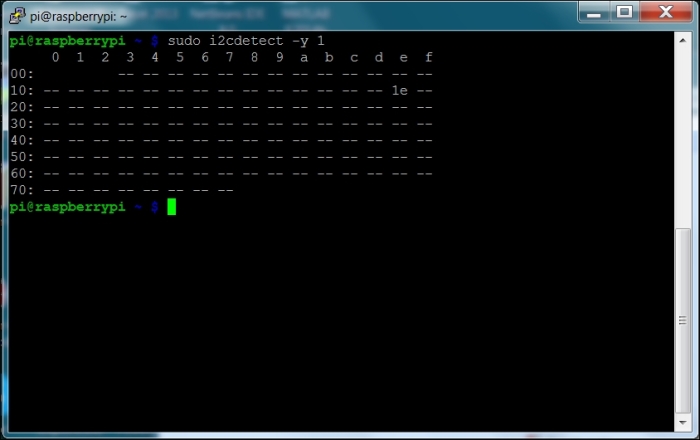
You can see the device at 1e. Now you can communicate with your digital compass. Here are the steps:
- You'll need to create a Python program. Before you create your Python code, you need to install the SMBus capability to access I2C. This can be done by typing
sudo apt-get install python-smbus. - Now reboot Raspberry Pi and create the following Python code:
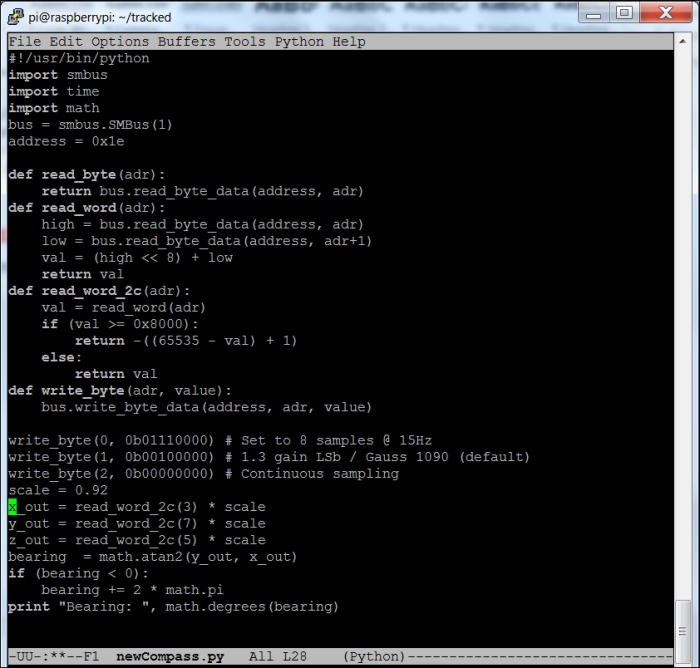
- Run the code by typing
python compass.py, and you should see the following: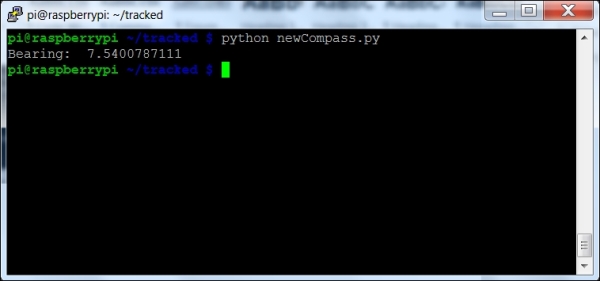
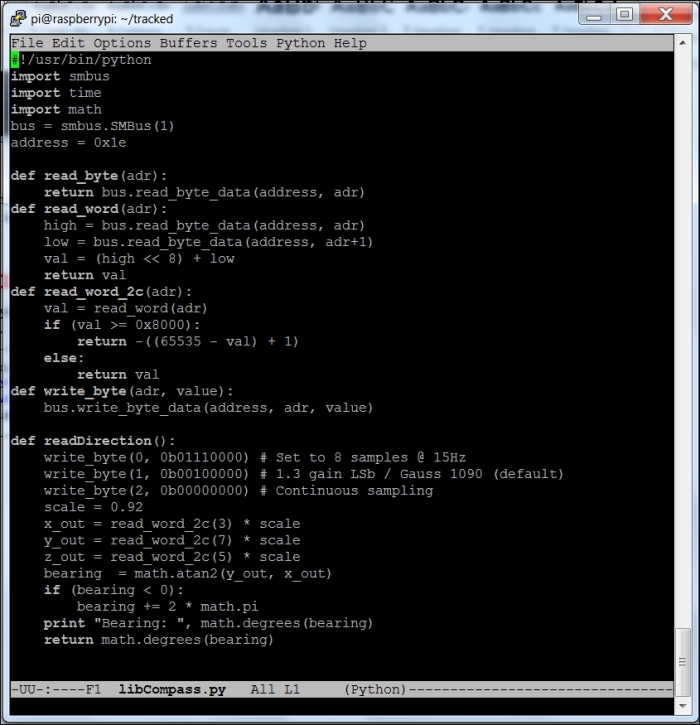
- The last step is to create a python file and function that can be imported into your tracked vehicle python program. Here is the python code:
Note
Now you can add direction to your project! As you move the device around, you can query the bearing value to see the direction of your tracked vehicle. Make sure that you position your compass away from your electronics, otherwise their magnetic fields may cause distortion on your compass measurements.
The program we just saw is a basic program. If you go to http://think-bowl.com/raspberry-pi/i2c-python-library-3-axis-digital-compass-hmc5883l-with-the-raspberry-pi/, you can find more about the other features that are available with this library. Now, you can add the compass capability with just a few lines of code to your tracked robot control program.