
1
Introduction to Tactile Internet
Tara ALI-YAHIYA
Department of Computer Science, University of Paris-Saclay, France
In broad terms, the Tactile Internet (TI) can be referred to as the interaction between humans and cyber-physical systems by dropping off the distance and ensuring a communication of the order of few milliseconds. Consequently, this would give the illusion that the remote system is too close, while ensuring that the interaction is occurring in a smooth manner. The TI envisions an extremely low latency along with high availability, reliability and +security that will not only revolutionize the technology market, but will also have a high impact on the lifestyle of people, society and business in terms of the vertical industry, according to the definition from the International Telecommunication Union (ITU) (ITU 2014).
However, the TI is viewed as a result of a sequence of cumulative cutting-edge technologies that witnessed great success. These technologies may be considered as the foundation upon which the TI is built. These technologies may include, but are not limited to, diver paradigms in mobile and wireless networks, cloud computing, smart computing, Internet of Things (IoT) and robotics. As a result, the TI can be viewed as the fruit of a multi-disciplinary domain, which has contributed to its progress through various engineering approaches and computational methods to make it function properly.
As a matter of fact, the TI’s mode of functioning is tightly linked to the human–machine interaction. Here, the human perception of system operation has a significant impact on the TI’s overall performance. We start this chapter by describing the relationship between the human perception of things with regard to the TI and then present an overview on the initiation of the TI, and all of the technologies assisted in its emergence. The objective is to introduce the necessary background and context for understating the TI and its main functionalities.
1.1. Human perception and Tactile Internet
Before getting in depth into the TI paradigm, it is essential to understand its impact on bringing changes to society. In fact, the TI introduced a new disruptive type of data, denoted by haptic data. The haptic data is related more to the human perception of objects through its sensory nervous system. In simple words, the TI proposes to transmit haptic data through the Internet, while the technological background behind this paradigm is more sophisticated and may involve multidisciplinary domains to deploy it and make it work properly. It is common that human haptic systems can perceive close objects through tactile and kinesthetic sensing. What if the objects are located in a remote environment? How can humans touch them and know their nature and properties? How can humans move, rotate and change the position of these objects remotely?
To address these issues, it is noteworthy to be able to recognize the type of haptic data from other types of data which are well-known in the world of Internet. Mainly, haptic data can involve kinesthetic and tactile perceptions, as shown in Figure 1.1. The kinesthetic perception refers to the information that is gathered by the mechanoreceptors located within joint capsular tissues, ligaments, tendons, muscles and skin. Once gathered, the feedback about the position, velocity, angular velocity, force and torque will be treated by the human body. Here, the feedback means the interaction of the human body with the kinesthetic perception, without the use of other senses.
If the kinesthetic is technically interpreted within the context of the human system interaction in the TI, then telesurgery through robots and teleoperation are the best examples to demonstrate it, as the contexts involve human-in-the-loop. This is when the communication and control mechanisms are under the control of humans and require feedback from the distant environment to close the global loop. The effect is represented by sending information about the position, force and movement, so that the robot on the other edge gets instructions to react accordingly. In turn, the robot would send feedback to the human on the other side of the world to assure the continuity of the process. Such feedback is called closed-feedback as it needs to be closed through the information control sent by the distant operator to the human. Certainly, the kinesthetic feedback and a combination of the auditory and visionary give a real human perception, in order to control the operator.
As for tactile information, the mechanoreceptors of the human skin sense various physical information from the environment; this is mainly related to the sense of touch by fingers. Here, tactile feedback can be interpreted by the physical response on an object, from the user input. The user input can be pressing, lifting, touching, etc., and the feedback can be denoted by friction, hardness or warmth that can be felt by the human. The killer application of tactile feedback is in virtual reality and augmented reality, which enable users to physically interact with virtual objects and sense the nature of the objects, locally or remotely. Note that the TI should not be confused with tactile data.
As a matter of fact, kinesthetic and tactile data are new to the Internet and their traffic behavior can vary from low rates to a huge amount of data that can be regulated for transmission through compression and codec techniques. The nature of the feedback determines reaction time of the human, and varies from 1 ms, 10 ms, 100 ms depending on how critical the application is and whether the sensory system of a human is being prepared for that reaction or not. The reaction time is different and the reaction itself can be auditory, visual or a sudden muscular movement. The human perception is complex and requires all of the senses (not only haptic), in order to interact with the surrounding objects. This is why the TI should translate all of these senses and feelings through a whole process of compression, coder/decoder, transmission mechanisms and technology of communication through different use cases.
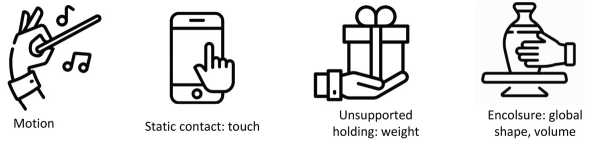
Figure 1.1. Some haptic perception
1.2. The roadmap towards Tactile Internet
The telecommunication/information and communication technology (ICT) has witnessed fast developments that have paved the way for the TI. The rapid growth of the Internet demonstrated how investment and commitment to research restructured the shape of communication, using fixed infrastructure to connect people, then deploying wireless and mobile infrastructure to have a ubiquitous service anywhere anytime, and connecting different objects to the Internet. Further, the stakeholders implicated in the communication started to vary and take different forms; as mentioned earlier, the communication was restricted to humans only. In addition to human-to-human communication, human-to-machine and machine-to-machine communications came forward.
The technological evolution was beyond the Internet, starting from the time when circuit switching and packet switching appeared. A combination of technological, social and commercial components can be the reason behind the evolution of the infrastructure and services provided to end-users today. The first and/or last mile took different shapes from the perspective of the Internet Service Provider (ISP), bringing the Internet Service to users through the use of the fixed cable-based technology, such as Fiber Optics (FO) and copper telephone lines.
The first or the last mile can currently be offered by wireless and mobile communications, through telecommunication operators. The ubiquitous connectivity is characterized by the employment of mobile and wireless networks, regardless of the technological standardization family, i.e., Institute of Electrical and Electronics Engineers (IEEE) or the 3rd Generation Partnership Project (3GPP). The most recent one is the Fifth Generation (5G) network, which is expected to be the key technology for enabling the deployment of the TI, through its new core network that is service-oriented, depending on the requirement of the users. This would be the first step towards customizing 5G to adapt to the new services introduced by the TI.
As a part of the history of communication, the IoT represented by the machine-to-machine communication is one of the considerable advancements. It encompasses the connectivity of millions of devices to the Internet. The devices can be of any type, but their core mission is to collect data from the environment where they are deployed and send it to the Internet. To process and analyze the generated data, cloud computing through its computing and storage infrastructure for handling this issue would be the best backing paradigm.
The TI can bring all of the technologies of communication and the computing and storage paradigms together to support the transmission of the new haptic data through the Internet. The TI can be considered as the capstone that completes the missing piece of the construction; this is due to the fact that the TI needs to be supported by the efficient technology of communication.
Despite the big transition that occurred in communication technology, i.e. from wired to wireless, the Internet has changed our interaction with the world. For example, from the point of view of User Centered Design (UCD), all of the efforts were spent providing the services of the Internet, while taking user experience into consideration. In the early days, the interaction with information was expressed through the rapidity of retrieving it, the easiness of exchanging it and the tools for searching it and creating it, through the collaborative work of spatially distant actors. While dealing with objects in the IoT, there is a dematerialization of the physical world. Sensors are used to measure the attributes of the real world and actuators are used to collect them. This requires a transfer of data over a network without human-to-human or human-to-machine interaction.
With the newly proposed TI, the human can interact with the machine through the Internet with a return of experience. The major difference between the IoT and the TI is that in the TI, the human is at the center of control; this is why its physiology, represented by the sensor systems of the body, and its psychology, represented by how the user perceives its experience, are crucial. All of the services provided by the TI should ensure that the user has a high Quality of Experience (QoE), so that the interaction between human and machine can be as smooth as possible.
1.3. What is Tactile Internet?
The progress in the development of the access networks, core networks and backbone networks did not happen without the progress of the type of traffic and services provided by the Internet. This may not only require physical changes in the network, but also the introduction of new functionalities and mechanisms that ensure the delivery of the service in an optimal way. If we consider the current traffic recognized by the Internet, we can classify them into video, audio and data. Regardless of the diverse types of applications and services that have appeared over time, the type of traffic did not evolve that much. The introduction of haptic data to the Internet, through the different applications, resulted in innovating the mechanisms dealing with this type of data, in order to transport it through the Internet without any difficulty, as the Internet is not ready to process haptic data yet. Thus, the TI is defined by the IEEE 1918.1 as “a network, or network of networks, for remotely accessing, perceiving, manipulating or controlling real or virtual objects or processes in perceived real time, by humans or machines” is expected to shift the paradigm of the Internet from content delivery to skill delivery (Aijaz et al. 2018).
Recently, the IEEE P1918.1 working group started to define the framework, application scenarios and technical concerns. Specifically, the new applications supported by the TI are Industry X.0, Automotive, E-Healthcare, which include a wide range of use cases that may require stringent Quality of Service (QoS), depending on whether they are time critical or not. A simplified architecture of the TI can be shown in Figure 1.2, where three important parts can be identified: the master domain, which is responsible for generating tactile and kinesthetic data; the network domain, which transports the haptic data through the different networks using packets, specifically the access network, core network and the Internet; and finally, the slave domain, where the data will be received and may be processed.
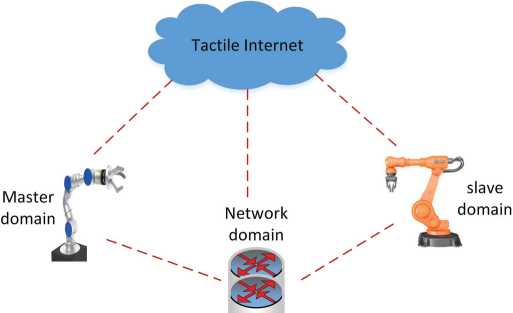
Figure 1.2. Tactile Internet architecture. For a color version of this figure, see www.iste.co.uk/ali-yahiya/tactile.zip
The TI is explicitly based on the local action in the master domain and the distant reaction in the slave domain, and vice versa. For this purpose, the TI can be keenly combined with the IoT, as sensors can be deployed in both domains to sense and actuate data (Fettweis 2014). We can imagine a robot in the slave domain that palpates a patient through the touch of a remote doctor in the master domain; the palpitation of the robot is controlled by sensorial gloves worn by the doctor to feel the body of the patient.
Haptic communication is an essential foundation of the TI. As the haptic devices permit the users to feel, touch and manipulate things over real and virtual fields, the transmission of haptic information is the main issue in the context of the TI, as finding a suitable haptic codec is a challenging issue for transmission over the Internet. Besides, a haptic codec may take other kinds of data into consideration, such as video and audio traffic that may be multiplexed with haptic data for compression and transmission over the same physical network.
The TI cannot come to light without close collaboration among telecommunication engineers, computer scientists and mechanical engineers. The telecommunication engineer should provide a suitable haptic communication with high reliability, while artificial intelligence (AI) is needed to improve the human–machine interaction, which is the basis of the TI. Mechanical engineers are needed to build the robots that interact with haptic instructions and achieve the specified task. To this end, the TI is also called the Internet of Skills, since haptic data can implicitly transfer a skill through the movement of hands, such as teaching a child to play the piano from the other side of the world, diagnosing a patient using a distant doctor, or practicing a chirurgical operation through a robot.
1.4. Cyber-Physical Systems and TI
The TI is fulfilling the requirements of the Cyber-Physical Systems (CPS), which were designed based on the interaction between hardware and software, including all of the algorithms and intelligent decisions to be taken in the system, in addition to the connectivity among these elements. In brief, it refers to the interaction between the real world and the information technology that designates the TI as a perfect candidate for CPS.
The matching between the TI and CPS is shown in Figure 1.4. In the following, we explain the components of the TI, by detailing all of the elements that constitute the TI: physical world, smart computing, Internet of Things, storage and computation, communication and feedback.
1.4.1. Physical world
The interaction of the TI with the physical world occurs through different use cases that share a common characteristic, which is characterized by controlling an object in a remote environment through the network. The use cases can include applications in the industry, especially in: automation; healthcare, represented by telesurgery and teleoperation where robotics are at the core of control process; virtual and augmented reality, with all of its different applications; gaming and entertainment and any application that makes the notion of smart cities viable, such as road traffic management using the cooperative driving of autonomous vehicles, smart management of resources, etc.
1.4.2. Internet of Things
IoT can be considered as an object with embedded sensors that collects data through sensing and actuating, which is then sent through the Internet to a predefined destination, in order to analyze it and make decisions in real-time or non-real-time, depending on the type of application. There is a variety of devices, software and communication protocols used to support the IoT functionalities. These functionalities should be carried out in an autonomous way, without human intervention. The TI is sometimes considered as an extension of IoT in a very large scale. This is due to the architecture of the TI, which incorporates IoT in both domains, while using 5G as the network domain. As a part of CPS, the interaction with the physical world in the TI is done through the IoT, which feeds the domains with several kinds of data.
1.4.3. Communication
The communication between the master and slave domains in the TI will play a great role in assuring the continuity of service between the master and slave domains. Indeed, the networking technology connecting both domains has a great impact on the QoS requirements for the different applications of the TI. This is justified by the fact that each application has its own requirements, not only in terms of QoS, but also in terms of the QoE experienced by the user. Actually, the use of network technology is not restricted to the network domain. The master and slave domains may include a network of sensors, such as Zigbee nodes, which have the capability of sensing and sending data to the actuator. In turn, the actuator may be connected to the access network via Wireless Local Network Area (WLAN) technology, such as WiFi. However, the legacy generations of mobile and wireless networks may not meet the new requirements of QoS for TI applications; this is why 5G is identified as the privileged technology for access and core networks, due to its high data rate and the salient feature of its core network, represented by separating the control plane from the user plane with service-based oriented architecture. However, for critical use cases like teleoperation, a fast feedback is expected to ensure a good functioning of the whole system. In this case, FO is used to obtain a fast feedback and send huge amounts of data. As a result, the TI can be seen as a network of networks with specified data types and functionalities that suit haptic communications.
1.4.4. Storage and computation
Having storage and computation as one of the components of the TI is essential due to the nature of TI applications, which are mostly real-time and need fast treatment. The edges are composed of IoT devices that are sensing and actuating data in real-time. The data should be stored and processed and then transmitted through the network domain. The main issue is that the IoT devices have limited life duration with limited energy, also, some actions need a rapid reaction. Storing and processing may not be performed in the master domain where the devices have limited capability in terms of memory and computation. Therefore, integrating cloud computing into the architecture of the TI to assist in data management is necessitated. However, cloud computing is not that suitable for real-time application, due to the introduction of further delays in the communication. Hence, the idea of service proximity is introduced through the deployment of fog computing and edge computing that provide all the services, while being close to the users.
1.4.5. Feedback
The feedback in the TI is very important in ensuring the appropriate continuity of the service. However, depending on the type of the haptic data exchanged between the master and slave domains, the sort of feedback can be decided. In general, haptic communications can be categorized into two major classes, depending on the type of human interaction with the distant environment. The first one can be represented by passive communication; this means that the interaction between the human and the remote environment will be limited to the exploration of the objects. Perception is the main activity that can be considered; however, the manipulation of objects and surfaces is not covered (Antonakoglou et al. 2018). The type of feedback in this category is an open-loop feedback; only tactile information is exchanged, since the instructions are one-way commands to be sent, as shown in Figure 1.3.
The second category is active haptic communication that includes both the perception and manipulation of distant objects, depending on whether the remote environment is real or virtual. In this case, the closed-loop feedback permits the exchange of kinesthetic information, which needs an interactive cooperation between the master and slave domains. The slave domain is completely dependent on the master domain, as it waits for commands in order to act accordingly; at the same time, it sends feedback to the master domain to initiate the subsequent operations, knowing that the feedback cannot only denote signals or commands, but also audio and video feedback, depending mostly on the application used (Pai et al. 2018).
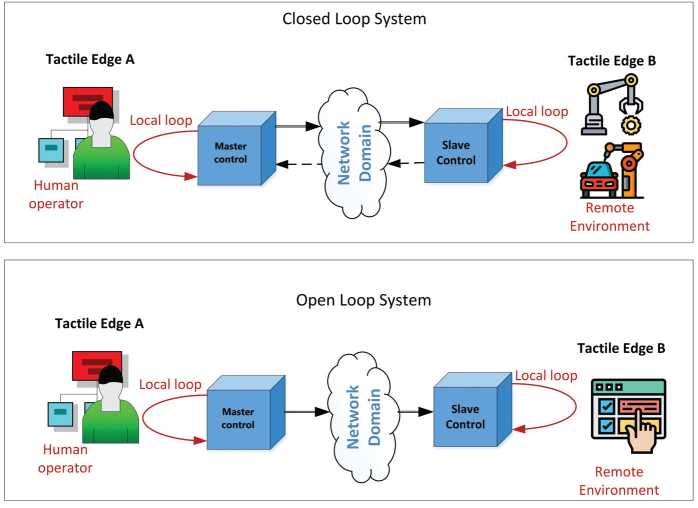
Figure 1.3. Open-loop versus closed-loop systems. For a color version of this figure, see www.iste.co.uk/ali-yahiya/tactile.zip
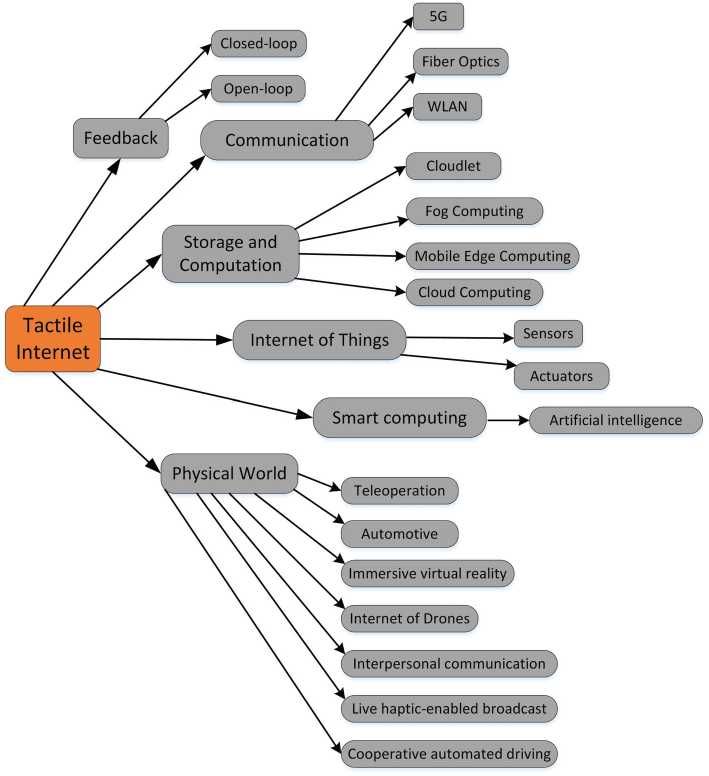
Figure 1.4. Tactile Internet based on cyber-physical systems
1.4.6. Smart computing
The need to make decision in order to ensure better predictions for the future, in an environment operating on the basis of action and reaction, is imperative. The difficulty is designated through leveraging data and making decisions in real-time. These decisions should be smart to ensure the awareness of the context of TI applications. Smart computing is dedicated for this purpose, with tools and methods that enable intelligent decisions to be made during ongoing sessions between master and slave domains. Exploiting the artificial intelligence (AI) concept, including all of its applications, can be used in the TI, especially when it concerns Machine Learning (ML) as its principal role in bringing intelligence to network domains through its prediction models. It is important to use ML and incorporate it in the TI architecture to solve the problem of stringent delay in haptic applications. Combining ML with the network part of the TI will play a significant role in giving the perception of zero-delay. This is done through the use of prediction models to predict movement on the remote domain of the TI. The prediction model will not only have an impact on the QoS, but also on the QoE of users who are involved in the loop. Investigating the appropriateness of a model for the TI context is a defying issue and should be selected well. Consequently, this would influence the precision of the decision of sending data from one domain to another.
1.5. References
Aijaz, A., Dawy, Z., Pappas, N., Simsek, M., Oteafy, S., Holland, O. (2018). Toward a tactile internet reference architecture: Vision and progress of the IEEE P1918.1 standard. CoRR [Online]. Available at: http://arxiv.org/abs/1807.11915.
Antonakoglou, K., Xu, X., Steinbach, E., Mahmoodi, T., Dohler, M. (2018). Toward haptic communications over the 5G tactile internet. IEEE Communications Surveys Tutorials, 20(4), 3034–3059.
Fettweis, G.P. (2014). The tactile internet: Applications and challenges. IEEE Vehicular Technology Magazine, 9(1), 64–70.
Pai, D.K., Rothwell, A., Wyder-Hodge, P., Wick, A., Fan, Y., Larionov, E., Harrison, D., Neog, D.R., Shing, C. (2018). The human touch: Measuring contact with real human soft tissues. ACM Transactions on Graphics, 37(4), 58:1-58:12.
ITU (2014). The Tactile Internet. ITU-T Technology Watch Report [Online]. Available at: https://www.itu.int/dms_pub/itu-t/oth/23/01/T23010000230001PDFE.pdf.