
2
Reference Architecture of the Tactile Internet
Tara ALI-YAHIYA
Department of Computer Science, University of Paris-Saclay, France
The design of devices supporting haptic technologies is essential for delivering the new services and different use cases introduced by the TI. In addition, the network architecture should entail all the use cases and demonstrate the interaction among the different functional entities of the TI. Proposing a general architecture will accelerate the deployment of the TI as it prepares the basis for TI functioning and makes it easy to add or remove some elements that are not needed from one use case to another. The flexibility of the design of the architecture and its role to act as an umbrella, even for special use cases that can be branched from a broad one, is a challenging matter. From this concept, the working group of IEEE 1918.1 proceeded to define the specifications of the TI by describing a global architecture that includes all the entities, interfaces, codec protocols for different types of applications. In this chapter, we will describe the architecture proposed by IEEE 1918.1 with its related use cases, as a step towards understanding the big picture of the TI from a technical point of view.
2.1. Tactile Internet system architecture
The TI working group IEEE 1918.1 defined the baselines of an architecture that makes use of a variety of telecommunication technologies, proximity of the cloud computing services to the users and the intelligent predictive algorithms to make any TI use case operational. It is worth mentioning that the TI is considered as an overlay paradigm that can be operated on different kinds of networks. Hence, the working group made all the efforts in order for its design to be flexible and compliant with the current ICT components. The IEEE 1918.1 architecture, as shown in Figure 2.1, is composed of three main parts, which are explicitly: (i) tactile edge A, which is normally called the master domain, (ii) network domain, which is responsible for traffic transport, and (iii) tactile edge B, which is called the slave domain. The master domain comprises tactile devices (TD) that may include different sensors and/or actuators (S/A) collecting data and forwarding or receiving them to/by the sensor/actuator gateway (SG/AG) that works as the interface between the S/A and the sensor/actuator nodes (SN/AN) (Aijaz et al. 2018; Holland et al. 2019). The TD can also include the human–system interface (HSI) node that produces haptic output, in this case it is called the HSI Node (HN) to convert the human inputs, such as instructions or voice commands into haptic inputs. Moreover, it can be represented by a controller node (CN) that provides control algorithms for the edge equipped with sensors and actuators such as sampling, multiplexing or demultiplexing for actuators and cognizance operations.

Figure 2.1. TI reference architecture of IEEE 1918.1
The main entity that interfaces the master to the network domain is the network controller (NC) and gateway node (GN) that can be collocated together in a Gateway Network Controller (GNC) either in the edge or in the network domain, as it is responsible for user plane data forwarding as well as control plane processing. The network domain is composed of a radio access network that is connected to the control plane entities (CPEs) and the user plane entities (UPEs) that reside in the core network.
An innovative node is added to the architecture, which is the support engine (SE) that ensures some functionalities such as caching, proximity computations and intelligent capabilities in order to ensure a reduced delay, especially for time-critical applications that require very low E2E latency. The SE can be located either in the master domain or in the cloud providing services to the network domain. In order to connect both tactile edges to the external application providers, the tactile service manager (TSM) will be responsible for the registration and authentication to that service in the third party network. One more interesting communication paradigm that is introduced in the IEEE 1918.1 is the method of connection between the two tactile edges via the network domain. Indeed, the latter can be composed of different types of networks, either wired, wireless or even a very fast and low latency network dedicated to low latency application traffic transportation such as fiber optic.
As for the interfaces, they are denoted by access (A), tactile (Tb), open (O), service (S) and network (N) interfaces, connecting the different elements of the architecture. For instance, the A interface connects the TD to the network domain through the GNC. While the Tb interface connects the entities inside one tactile edge. As for the O interface, it links the SE to other components of the architecture, whereas the S interface relays GNC to the TSM for sending control information and, finally, the N interface connects the internal entities of one network domain (Holland et al. 2019).
2.2. IEEE 1918.1 use cases
The IEEE 1918.1 working group has defined seven use cases that make use of the TI architecture in order to deliver its services. The tactile edge produces the haptic data as well as the other conventional Internet data. The production of application data depends on the type of use cases. These are identified by the IEEE 1918.1 standard, as shown in Figure 2.2:
- 1) teleoperation;
- 2) automotive;
- 3) immersive virtual reality (IVR);
- 4) Internet of drones;
- 5) interpersonal communication;
- 6) live haptic-enabled broadcast;
- 7) cooperative automated driving.
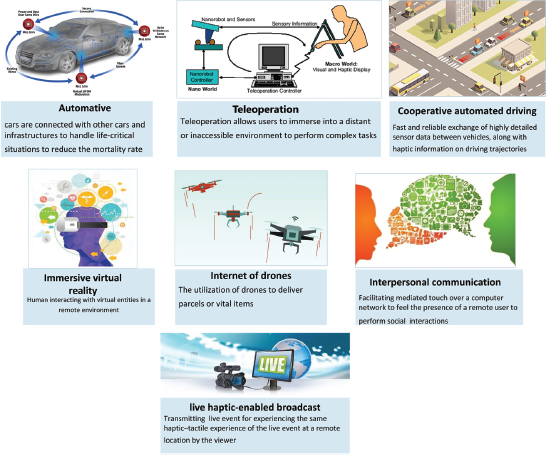
Figure 2.2. Tactile Internet use cases
2.2.1. Teleoperation
The teleoperation use case covers a wide range of operations that require controlling an object in an inaccessible remote environment to achieve some tasks. The best examples on teleoperation use cases are telesurgery and telerobotics (see Figure 2.3). Adding haptic modality to this system needs some components to be inserted, in order to provide a realistic perception about the environment from the point of view of users. The QoE of users should be as high as possible with regard to some predefined measurements. In order for this system to work properly, the operator or the user in the master domain would generate commands in terms of velocity and position to be transmitted through the network domain to the teleoperator in the slave domain. The teleoperator in turn would perform the instructions and send back feedback in the form of video, audio or haptic signals in order to close the global loop. The stability of the global loop is mainly bounded by the QoS as the delay requirement ranges between 1 and 10 ms so that the whole system works correctly.
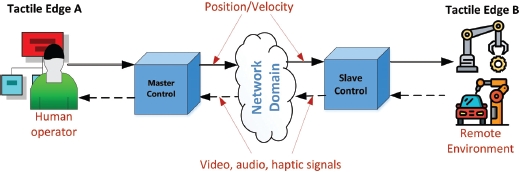
Figure 2.3. Teleoperation use cases
2.2.2. Automotive
Safety and security while driving a vehicle is not only related to the built-in functionalities of the car itself but also depends on the connectivity of the car with other cars. Cars of the future are expected to connect to each other and make appropriate decisions in good time. However, to make a good decision, the vehicle should be equipped with the necessary equipment that increases the interaction between the driver and the vehicle. From here, the two concepts that empower the TI, namely machine-to-machine and human-to-machine, will play a large role towards achieving this goal. For this purpose, sensors are used to collect data in real time combined with video and audio applications to help the driver in any critical situation. For the electronics of the car to communicate with each other, the IEEE 802.1 Time-Sensitive Networking (TSN) has proposed Audio Video Bridging (AVB) that connects the car’s electronics through an Ethernet network adapted to the structure of the car. Haptic applications should be integrated to increase the interaction between the driver and the vehicle and the vehicle itself with other vehicles through the 5G network as the network domain, as feedback is important depending on the contextual information gathered by the vehicles.
2.2.3. Immersive virtual reality (IVR)
Virtual reality (VR) enables the user to interact with the computer environment through an interface that makes him/her feel like they are experiencing real life, as it engages all of their senses through simulation tools. Indeed, VR is today’s killer application, including gaming and entertainment, training and simulations, transportation, manufacturing, and many other industry verticals. The term “immersive” specifies how users are involved in touching the virtual objects with all their senses. When the user interacts with distant virtual subjects through the network, the QoS in terms of data rate should be guaranteed. This is due to the greedy nature of VR traffic that requires a high data rate. The network plays a huge role in giving a real perception when dealing with haptic and tactile perception. Hence, a high-speed technology network such as FO and 5G could be good candidates for such a context.
2.2.4. Internet of drones
The Internet of drones, or what we call today unmanned aerial vehicles (UAVs), can be considered as the flying IoT devices that collect data from places difficult to reach. UAVs can have commercial, industrial and military missions, ranging from entertainment to surveillance to agriculture to parcel delivery. With the increasing number of UAVs, their traffic management should be taken into account as collisions may occur. From the TI perspective, the master domain may contain the dashboard that controls the drones in the slave domain through the network domain, as shown in Figure 2.4. However, due to the high speed of drones, again, the QoS in terms of low latency should be guaranteed. In addition, algorithms for drone route management should be implemented in an intelligent way to ensure the avoidance of collisions.
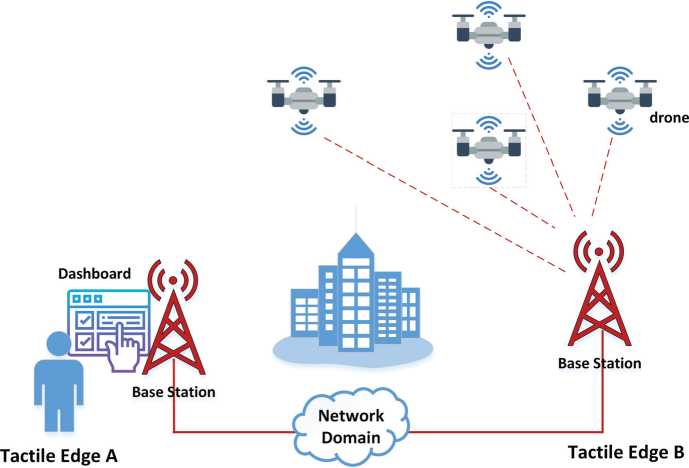
Figure 2.4. Internet of drones use case
2.2.5. Interpersonal communication
Interpersonal communication represented by audio call or any other form of Internet applications for delivering audio and video data is the basis for contact between people. However, such contact can lack feeling or emotion in remote communications. Moreover, for effective communication with touch and physical contact among family and friends, a haptic protocol needs to be used in the call. A haptic protocol for interpersonal communication requires that all haptic and non-haptic data be combined with each other. This means that both traditional Internet data and non-traditional, i.e. haptic, data should be sent at the same time in order to have a realistic feeling. It is important to mention that synchronization in haptic data exchange is very critical in such a context. Hence, QoE is prominent and user experience has a considerable effect on how the system works accurately (see Figure 2.5).
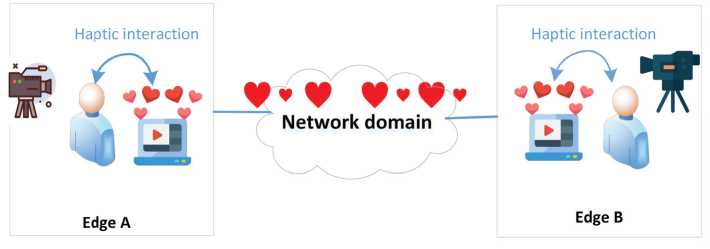
Figure 2.5. Interpersonal communication use cases
2.2.6. Live haptic-enabled broadcast
For a user to interact with a broadcasted event such as a football match or collaborative game played online, he or she can achieve it either passively or actively accordingly. Passively means that a user can only interact with the sense of vision and hearing, while actively means engaging other senses such as touching and feeling. The question is then how to deliver feeling or emotion to a distant user through TI technology from a broadcasted event. Incorporating haptics into the broadcasting of events requires frameworks that enable the integration of haptic effects into traditional audio-visual media. The difficulty in such platforms is to encode the haptic sensation and transmit it to the user who needs to be equipped with the appropriate electronic devices to decode signals that bring haptic effects to the users.
2.2.7. Cooperative automated driving
Self-driving vehicles or remotely controlled vehicles are the best case studies that can represent the TI relationship with vehicles. It can be represented by controlling a group of vehicles in an intelligent way for different reasons such as safety, security and traffic congestion. Cooperative automated driving has already been enabled by the vehicle-to-vehicle (V2V) or vehicle-to-everything (V2X) introduced in the latest release in LTE towards the path for 5G. The aim is to update all vehicles with regard to contextual awareness to have a complete vision of the roads and their capacities. This is done though protocols, algorithms for message dissemination among the vehicles and new haptic information exchange to support the TI paradigm.
2.3. Conclusion
Despite the general-purpose reference architecture proposed by IEEE1918.1, it is important to mention that this architecture can include any use cases and can even be personalized to special cases depending on the fine granularity of the application of the TI. The comprehension of the architecture would facilitate the understanding of the following chapters that rely mainly on the components of the architecture but from different points of view.
2.4. References
Aijaz, A., Dawy, Z., Pappas, N., Simsek, M., Oteafy, S., Holland, O. (2018). Toward a tactile internet reference architecture: Vision and progress of the IEEE P1918.1 standard. CoRR [Online]. Available at: http://arxiv.org/abs/1807.11915.
Holland, O., Steinbach, E., Prasad, R.V., Liu, Q., Dawy, Z., Aijaz, A., Pappas, N., Chandra, K., Rao, V.S., Oteafy, S., Eid, M., Luden, M., Bhardwaj, A., Liu, X., Sachs, J., Araúo, J. (2019). The IEEE 1918.1 “tactile internet” standards working group and its standards. Proceedings of the IEEE, 107(2), 256–279.
- For a color version of all the figures in this chapter, see www.iste.co.uk/ali-yahiya/tactile.zip.