
Two major classes of trunked radio systems are the Lost Call Cleared (LCC) systems and Lost Call Delayed (LCD) systems [Sta90].
In Lost Call Cleared systems, queueing is not provided for call requests. When a user requests service, there is minimal call set-up time and the user is given immediate access to a channel if one is available. If all channels are already in use and no new channels are available, the call is blocked without access to the system. The user does not receive service, but is free to try the call again later. Calls are assumed to arrive with a Poisson distribution, and it is further assumed that there are a nearly infinite number of users. The Erlang B formula describes the grade of service (GOS) as the probability that an arbitrary user will experience a blocked call in a Lost Call Cleared system. It is assumed that all blocked calls are instantly returned to an infinite user pool, and may be retried at any time in the future. The time between successive calls by a blocked user is a random process and is assumed to be Poisson distributed. This model is accurate for a large system with many channels and many users with similar calling patterns.
In Lost Call Delayed systems, queues are used to hold call requests that are initially blocked. When a user attempts a call and a channel is not immediately available, the call request may be delayed until a channel becomes available. For LCD systems, it is first necessary to find the likelihood that all channels are already in use. Then, given that no channel is available initially, it is necessary to know the probability of how long the call must be delayed before a channel is available for use. The likelihood of a call not having immediate access to a channel in a LCD system is determined by the Erlang C formula. For LCD systems, the GOS is measured by the probability that calls will have delays greater than t seconds. The knowledge of the Erlang C formula and the service distribution is used to analyze the GOS. It is assumed that a nearly infinite number of users are present in the system, and that all calls in the queue are eventually serviced. The Erlang C model also assumes a large number of channels and a large number of users with similar calling patterns. Typically five or more channels are considered to be a sufficiently large number of channels.
The Erlang B formula determines the probability that a call is blocked, and is a measure of the GOS for a trunked system that provides no queuing for blocked calls (an LCC system). The Erlang B model is based upon the following basic assumptions:
Call requests are memoryless, implying that all users, including blocked users, may request a channel at any time.
All free channels are fully available for servicing calls until all channels are occupied.
The probability of a user occupying a channel (called the service time) is exponentially distributed. Longer calls are less likely to happen as described by an exponential distribution.
There are a finite number of channels available in the trunking pool.
Traffic requests are described by a Poisson distribution which implies exponentially distributed call interarrival times.
Interarrival times of call requests are independent of each other.
The number of busy channels is equal to the number of busy users, and the probability of blocking is given as

where C is the number of trunked channels, and A is the total offered load to the trunked system.
Consider a system with C channels and U users. Let λ be the total mean call arrival rate per unit time for the entire trunked system (average number of call requests per unit time over all channels and all users), and let H be the average call holding time (average duration of a call). If A is the offered load for the trunked system, then A = λH.
The probability that a call requested by a user will be blocked is given by
It is assumed that calls arrive according to the Poisson distribution, such that
where a(t) is the number of call requests (arrivals) that have occurred since t = 0 and τ is the call interarrival time (the time between successive call requests). The term λ denotes the average number of call requests per unit time over the user population, and is called the arrival rate.
The Poisson process implies that the time of the nth call arrival and the interarrival times between successive call requests are mutually independent. The interarrival times between call requests are exponential and mutually independent, and the probability that the interarrival time will be less than some time s is given by Pr(τn ≤ s) = 1 − e−λs, s ≥ 0 where τn is the interarrival time of the nth arrival, and τn = tn + 1 − tn, where tn is the time at which the nth call request arrived. In other words, the probability density function for τn is [Ber92]
For every t ≥ 0, δ ≥ 0,
where O(δ) is the probability of more than one call request arriving over the time interval δ and is a function of δ such that ![]()
The probability of n arrivals in δ seconds is found from Equation (A.3)
The user service time is the duration of a particular call that has successfully accessed the trunked system and has been allocated a channel for a call. Service times are assumed to be exponential with mean call duration H, where μ = 1/H is the mean service rate (average number of serviced calls per unit time). H is also called the average holding time. The probability that the service time of the nth serviced call will be less than some call duration s is given by
and the probability density function of the service time is
where sn is the service time of the nth call.
This trunking system (represented by the Erlang B formula) is called an M/M/C/C queueing system. The first M denotes a memoryless Poisson process for call arrivals, the second M denotes an exponential service time for the users, the first C denotes the number of trunked channels available, and the last C indicates a hard limit on the number of simultaneous users that are served.
The property of Markov chains can be used to derive the Erlang B formula. Consider a discrete time stochastic process ![]() that takes values from the set of nonnegative integers, so that the possible states of the process are i = 0, 1,.... The process is said to be a Markov chain if its transition from the present state i to the next state i + 1 depends solely on the state i and not on previous states. Discrete time Markov chains enable the traffic to be observed at discrete observation points for specific traffic conditions. The operation of a practical trunked system is continuous in time, but may be analyzed in small time intervals δ, where δ is a small positive number. If Nk is the number of calls (occupied channels) in the system at time kδ, then Nk may be represented as
that takes values from the set of nonnegative integers, so that the possible states of the process are i = 0, 1,.... The process is said to be a Markov chain if its transition from the present state i to the next state i + 1 depends solely on the state i and not on previous states. Discrete time Markov chains enable the traffic to be observed at discrete observation points for specific traffic conditions. The operation of a practical trunked system is continuous in time, but may be analyzed in small time intervals δ, where δ is a small positive number. If Nk is the number of calls (occupied channels) in the system at time kδ, then Nk may be represented as
where N is a discrete random process representing the number of occupied channels at discrete times. Nk is a discrete time Markov chain with steady state occupancy probabilities which are identical to the continuous Markov chain, and can have values ranging on 0,1,2,....C.
The transition probability Pi,j describes the probability of channel occupancies over a small observation interval, and is given by
Using Equations (A.5) through (A.7), and letting δ → 0, we obtain
The transition state diagram for the Markov chain is shown in Figure A.1

Figure A.1 is a Markov chain representation of a trunked system with C channels. To understand the Markov chain state diagram, assume that there are 0 channels being used by the system, i.e., there are no users. Over a small interval of time, the likelihood that the system will continue to use 0 channels is (1 - λδ). The probability that there will be a change from 0 channels to 1 channel in use is given by λδ. On the other hand, if one channel is in use, the probability that the system will transition to 0 used channels is given by μδ. Similarly, the likelihood that the system will continue to use 1 channel is given by 1 − λδ − μδ All of the outgoing probabilities from a certain state sum to 1.
Over a long period of time, the system reaches steady state and has n channels in use. Figure A.2 represents the steady state response of an LCC system.

At steady state, the probability of having n channels in use is equivalent to the probability of having (n − 1) channels in use, times the transition probability λδ.
Hence, under steady state conditions,
Equation (A.18) is known as the Global Balance Equation. Furthermore,

Using the Global Balance equation for different values of n, it is seen that
Evaluating Equation (A.20) for different values of n
and

Substituting Equation (A.23) in Equation (A.24)
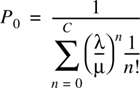
From Equation (A.23), the probability of blocking for C trunked channels is
Substituting Equation (A.25) in Equation (A.26),

The total offered traffic is A = λH = λ/μ. Substituting this in Equation (A.27), the probability of blocking is given by

Equation (A.28) is the Erlang B formula.
The Erlang C formula is derived from the assumption that a queue is used to hold all requested calls which cannot be immediately assigned a channel. The Erlang C formula is given by
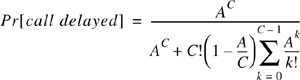
If no channels are immediately available, the call is delayed and held in a queue, and the probability that the delayed call is forced to wait for more than t seconds in the queue is given by
where C is the total number of available channels, t is the delay time of interest, and H is the average duration of a call. The probability that any caller is delayed in the queue for a wait time greater than t seconds is given by

The average delay D for all calls in a queued system is given by
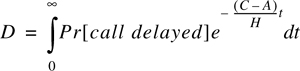
where as the average delay for those calls which are queued is given by H/(C − A).
Consider a system where C is the number of trunked channels. The assumptions used to derive the Erlang C formula are similar to those used to derive Erlang B, except for the additional stipulation that if an offered call cannot be assigned a channel, it is placed in a queue which has an infinite length. Each call is then serviced in the order of its arrival, the arrival process obeying a Poisson distribution given by
where a is the number of call arrivals which are waiting for service.
Just as the Erlang B formula was derived using the assumption that all call interarrival times are exponential and independent, the time between successive call arrivals is τn = tn + 1 − tn and the distribution of the interarrival times is such that
As was the case for Erlang B, the service time for each user already on the trunked system is assumed to be exponential and is given by
Using discrete time Markov chains with transition probabilities given in Equations (A.12) to (A.17), the Erlang C formula is easily derived. Let Pi,j denote the transition probability of going from state i to state j. The state diagram for the system is shown in Figure A.3.

The Erlang C formula is derived by assuming that the trunked system is a M/M/C/D queue, where C denotes the maximum number of simultaneous users and D is the maximum number of calls that may be held in the queue for service. If D is assumed to be infinite, then the system is an M/M/C/∞ queue, commonly referred to as simply M/M/C queue. If D is infinite, then Pk may denote the steady state probability of finding k calls in the system (both served and queued calls). That is,
where Nt is the total number of calls either using or waiting for the system at time t. In steady state, the probability that the system is in state k and makes a transition to state k − 1 in the next transition interval is the same as the probability that the system is in state k − 1 and makes a transition to state k. Thus, from the state diagram shown in Figure A.3,
hence
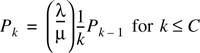
and
hence
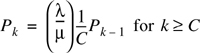
and it follows that
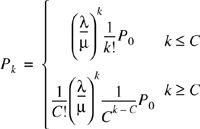
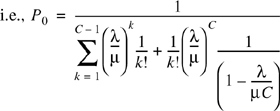
Since  , we have
, we have


The probability that an arriving call occurs when all C channels are busy and thus has to wait can be determined using Equation (A.42).
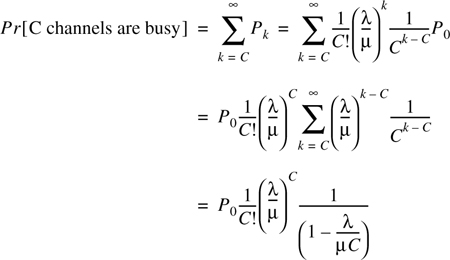
The above equation is valid for ![]() . Substituting for Po from Equation (A.45)
. Substituting for Po from Equation (A.45)
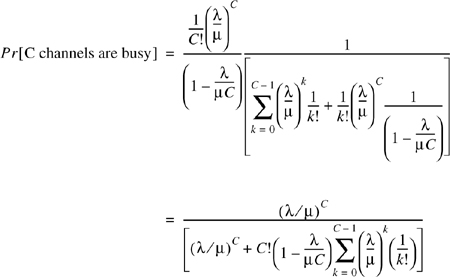
But, A = λ/μ = λH. Substituting this in Equation (A.47)

Equation (A.48) is the expression for Erlang C.