
Introduction
Danilo Comminiello⁎; José C. Príncipe† ⁎Sapienza University of Rome, Rome, Italy
†University of Florida, Gainesville, FL, United States
Abstract
This chapter aims at introducing this book volume and providing the necessary guidelines for reading the contributions described in the various chapters. Therefore, we define here the principles that form the common thread between the book chapters, at the end of which the reader will have an exhaustive overview of the recent frontier issues in the research and development of learning methodologies for nonlinear modeling. For this reason, this chapter first describes what are the key concepts that will be covered in the book and deepened in each chapter. Challenges and opportunities in investigating nonlinear models are discussed, within emerging issues that require novel methodologies to be developed. Finally, the book organization is presented with a brief introduction to individual chapters.
Keywords
Adaptive machine; Online learning; Nonlinear modeling; Neural processing systems
1.1 Nonlinear System Modeling: Background, Motivation and Opportunities
1.1.1 Modeling an Unknown System
In an engineering context, system modeling refers to the study and analysis of a particular real-world plant (or simply referred to hereinafter as “system”), whose characteristics are partially or completely unknown, and to the estimation of some of its behavioral properties, allowing to build a “model” capable of reproducing, predicting or simulating the same behavior of the analyzed plant that can then be utilized in a control framework (system identification) or simply as a predictor of future outputs (decision making).
In many real-world applications, the modeling of an unknown plant represents a key step to have a full understanding of the capabilities and behavior properties of such a plant or even of an entire industrial installation that includes the plant. Often, the knowledge of the system behavior is crucial for the prediction or the simulation of a result, depending on certain input data, on any external factor or on a change in the environment for decision making. Through the analysis of an unknown plant it may be possible to have full control over it and possibly over the full installation. This point is important, for example, for the quality monitoring of a certain working flow, rather than detecting anomalies, faults or criticalities. Analyzing an unknown plant can also be very important for the development of new processes. In fact, it is possible to exploit a system estimate to design a new model that has the task of properly correcting any abnormal or critical system behaviors when they occur.
In the current applications of statistical science to streaming data, the problem is very similar, except now the identification of the system that produces the data stream can be directly connected to decision devices such as classifiers that produce online, and sometimes even in real time, depending on the strings of decisions about the content of the streaming data flow.
These properties imply a great demand for modeling techniques, which can even be very different, depending on the application area. For this reason, system modeling has always been the object of constant research, with a constant need to update modeling methods for technological advancements and for new and emerging issues. In that sense, this book aims to highlight the new requirements and the resulting methodological novelties in system modeling.
1.1.2 Suitable Models for Real-World Problems
In this section, we want to describe the problems that will be addressed in this book and the models that can be adopted to provide a feasible solution. To this end, we want to introduce a brief description of the classes of models that will be taken into account.
Unknown systems can be categorized according to their natural mapping function, i.e., how they transform their inputs into outputs, based on which they can be defined as linear or nonlinear. Linear systems represent a complete and well-defined class where input–output relationships and derivation of parameters are uniquely determined by a theoretical derivation [1–5]. Alternatively, systems that do not satisfy the superposition principle of linear theory are classified as nonlinear systems, which complicates the theoretical foundations, but they still need to be further characterized, using techniques based on their characteristics. This classification of a system affects its modeling and, in particular, the choice and selection of a suitable model.
Very often, especially in the past, modeling of an unknown plant was performed by using methods derived from linear system theory, often regardless of the plant nature. The reasons for this choice can be found mainly in three important features:
- • Ease of design. Linear system theory has been widely studied and it offers a wide range of system modeling solutions. Such solutions are often based on theoretic optimization and robustness that often allow a model estimate to describe, albeit with a certain degree of approximation, the unknown plant.
- • Ease of implementation. Linear system theory has always been the subject of studies not only for performance improvement but also for computational efficiency. The computational constraint has always represented a constant issue in application studies that require real-time implementation. For this reason, a wide variety of alternative linear methods can be found that, besides offering a more or less approximate solution to the plant, also allow the required computational load to be reduced as much as possible.
- • Ease of handling. Over the years, linear system theory has developed robust and reliable solutions. Very often, once properly initialized, a well-designed linear model cannot undergo major deterioration, thus the control of such systems is rather straightforward. In addition, the behavior of a linear model is often quite easy to predict during the testing phase, which further simplifies any corrective action on the model, when needed.
However, real-life problems always entail a certain degree of nonlinearity, which makes linear models a nonoptimal choice. The issue is that if the plant is nonlinear and the model adopted is linear, there will be always an error which is outside the control of the designer, so although the solution found is theoretically optimal, it may be practically useless. In order to evaluate the behavior of such systems in these conditions, it is necessary to adopt nonlinear models, whose choice is more complex than a linear one and requires further analysis of the system class to be modeled.
To this end, another distinctive feature of nonlinear systems to be modeled is represented by the availability of any a priori knowledge or physical detail that can be exploited to select a suitable model for the identification [2,3,6,5]. In that sense, when prior information is completely available it is possible to choose a model that perfectly fits the unknown system. In this case, the adopted model is also called a white box. When only some a priori information or physical insights are known, but several parameters remain to be estimated from input data, a gray box model can be used, which can exploit a well-defined structure. Finally, if no a priori information on the system is available a black box model must be chosen, which needs to show high capabilities in fitting an unknown solution. Modeling in this case is often based on behavioral approaches.
Real-world problems often require this last class of models, whose choice is made more complex by the nonlinear nature of a system. The complexity of selecting such models lies in the wide range of possible choices, which in many cases will be limited by a number of conditions, e.g., concerning flexibility, approximation capabilities to the solution, computational complexity and handling capacity.
Recent advances on this kind of models are mainly introduced in this book for the modeling of nonlinear systems.
1.1.3 Challenges and Opportunities in Investigating Nonlinear Models
As stated, the choice of employing nonlinear models has the drawback of losing simplicity and universality due to linear theory outlined above. However, from the point of view of the research and development such a choice entails countless opportunities, among which the main ones are discussed below:
- 1. Designing a nonlinear method can be much more complicated and risky than a linear method. While the linear system theory benefits from an extensive literature (see [1,4,5], among others), nonlinear systems are not characterized by a unified theory [7–13]. This is certainly a reason for encouraging the development of theories that can fit well-defined scenarios, and it is also the reason why the modeling of nonlinear systems has always been a very active and investigated field of research. Designing nonlinear models may show some difficulty and theoretical challenges, but it may lead to significant improvement in performance results, depending on the degree of nonlinearity introduced by the system to be estimated.
- 2. The implementation stage of a nonlinear model is another point that has always discouraged the use of nonlinear models, since these ones are almost always more complex than linear models and very often they require much higher computational load than the linear models. This is the case, for example, for those applications that require real-time processing, like acoustic echo cancellation, in which, over the years, linear methods have been preferred to nonlinear solutions due to much lower computational cost, often at the expense of performance and, therefore, of quality. However, recent years have seen a significant technological development that has led to greater availability of computational resources. This has allowed to reconsider many theories developed for nonlinear models, thus creating many advantageous opportunities for development.
- 3. In addition to the points above, linear models have often been preferred in the past due to their ease of use and reliability. We cannot say the same about nonlinear models that require further stability-driven efforts as well as a careful choice of an exact model. In fact, an inappropriate choice of the model, or even just of any configuration of it, can cause a loss of performance, even worse than using approximate (i.e., not optimally configured) linear systems. However, this point too represents a huge reason to investigate nonlinear models.
- 4. Emerging fields of application, including big data analysis, sensor data processing, internet of things and the 4.0 paradigm [14], exploit several concepts from nonlinear system identification to infer or define laws, relationships, dependencies or causal effects from large sets of data [12]. This inevitably leads to defining new problems and scenarios to be addressed and to creating new opportunities for studying and developing novel nonlinear modeling methodologies.
1.2 Key Factors in Defining Adaptive Learning Methods for Nonlinear System Modeling
Nonlinear system modeling is a very wide field of research. This book mainly focuses on those methodologies for nonlinear modeling that involve any adaptive learning approach to process data coming from an unknown nonlinear system. Such adaptive learning methods aim at estimating the nonlinearity introduced by the unknown system on the available data. This allows one to identify and model the unknown nonlinear system.
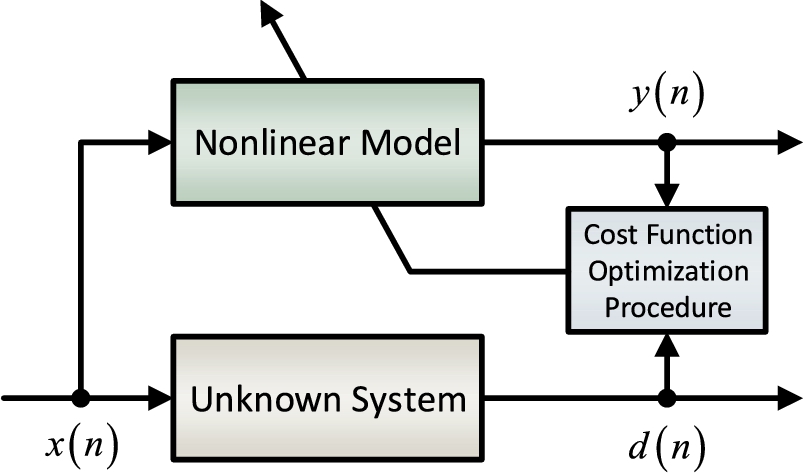
A typical scheme of the adaptive modeling of an unknown nonlinear system is shown in Fig. 1.1, where the system to be modeled receives an input ![]() and generates a nonlinear output
and generates a nonlinear output ![]() , possibly including any additive noise. A nonlinear model, receiving the same input
, possibly including any additive noise. A nonlinear model, receiving the same input ![]() of the unknown system, is employed to “learn” the behavior of a system from its response and try to perform exactly like it. In order to estimate at best the behavior of the unknown system, a suitable choice of the model must be made. Moreover, the parameters of the chosen nonlinear model need to be optimized by an adaptive procedure, usually based on a cost function involving the response
of the unknown system, is employed to “learn” the behavior of a system from its response and try to perform exactly like it. In order to estimate at best the behavior of the unknown system, a suitable choice of the model must be made. Moreover, the parameters of the chosen nonlinear model need to be optimized by an adaptive procedure, usually based on a cost function involving the response ![]() of the unknown system and the nonlinear output
of the unknown system and the nonlinear output ![]() produced by the nonlinear model.
produced by the nonlinear model.
Adapting a model can depend on many factors, which can strongly affect its strategy. The knowledge of such information allows one to treat an unknown system as a gray box and therefore to provide a reliable modeling. Here we want to focus on key aspects that can affect the design of the learning strategy.
One of the first aspects that are evaluated in a model design is the formulation of the problem to be addressed, according to which adaptation models can be different. For example, different choices can be made for a problem of classification rather than a regression one, for identification rather than prediction, etc.
However, one of the most significant factors that determine the learning of a model are input data. Most of the modern theory in machine learning and signal processing is based on the learning from data paradigm (see [15,16], among others). According to data received by a model, a learning strategy is able to identify the desired solution within a set of hypotheses by minimizing a chosen cost function. Input data can be received from a single source or from multiple sources, even asynchronously and heterogeneously, as is often the case in the era of big data. In this sense, the amount of data to process is definitely crucial information for model design.
In addition to the amount of data, it is important to know the rate with which these data arrive at the model. Based on this information, input data can be analyzed altogether (offline learning) or progressively (online learning) (see for example [17,18]). This book will focus in particular on online learning methods for nonlinear modeling. Online learning can be performed in the following ways:
- • example-by-example learning (or often simply online learning): for each iteration, only one new example is available at the model input;
- • batch learning: a whole set of examples is available at each iteration;
- • mini-batch learning (or block-based learning): at each iteration a subset of the possible examples is available.
A special case of online learning is real-time learning, which occurs when the iteration index coincides with the time index.
Another aspect that cannot be neglected concerns the architecture of the proposed method. Depending on the problem, the nonlinear modeling method can be implemented by a simple filter, or by a neural network, rather than by more complex structures of distributed and cooperating agents on networks or even on graphs. In this book, the recent proposals in this respect will be presented.
Finally, modeling a nonlinearity with an online approach allows us to consider a wide range of application situations in which nonlinearity can vary during iterations, showing nonstationary and dynamic behaviors. This is definitely one of the key aspects for choosing an online approach to modeling nonlinear systems. Furthermore, due to the recent technology progress and, in particular, to the always growing availability of computational resources and calculation tools, online learning strategies have given the possibility to develop effective nonlinear methods that are also computationally efficient and even suited for real-time data analysis and processing. This is the reason why this book aims to provide a view on the recent methodologies that show an adaptive learning theory aimed at the identification and modeling of several and complex nonlinear systems.
1.3 Book Organization
This book contains 15 chapters, including this one. We aim at covering the most significant topics of the recent years among the field of nonlinear system modeling in the next 14 chapters, divided in four parts.
Part 1 Part 1 is composed of three chapters (2–4) and it deals with linear-in-the-parameter (LIP) nonlinear filters. This class of nonlinear filters won popularity in the past with adaptive Volterra filters, but it is again receiving increasing interest in recent years due to the possibility of combining the strength of complex nonlinear models with the flexibility of linear adaptive filters.
Chapter 2, by Alberto Carini et al., provides an exhaustive overview on LIP nonlinear filters, including the theoretical aspects that contributed to making these methods effective and reliable. This class of filters includes several kinds of models and it is presented under a unified framework. In particular, the chapter introduces the orthogonal LIP nonlinear filters, which leverage the orthogonality of basis functions to improve the robustness of the model. In order to guarantee the orthogonality of the basis functions, the development and use of perfect periodic sequences, together with the multiple-variance identification method, is also introduced. Finally, the chapter proves by experimental results that this kind of filters is capable of providing fast convergence of gradient descent adaptation algorithms and efficient identification of the nonlinear systems.
Chapter 3, by Michele Scarpiniti et al., presents an overview of a family of LIP nonlinear filters, known as Spline Adaptive Filters (SAFs), consisting of a cascade of a linear adaptive filter and a flexible memoryless nonlinear spline function. The peculiarity of SAFs is that the shape of the spline function can be modified during learning, by including the spline control points in the overall adaptive optimization procedure. SAF mainly uses B-splines and Catmull–Rom splines, since they allow one to impose simple constraints on control parameters. Due to the flexibility and ease of implementation, SAFs can be applied to several real-world nonlinear problems and some examples can be found in this chapter.
Chapter 4, by Christian Hofmann et al., introduces and reviews the Significance-Aware (SA) filtering concept, which aims at decomposing the model for an unknown system and its adaptation mechanism into synergetic subsystems to achieve high computational efficiency. The decomposition can be performed according to serial or parallel strategies. The SA approach perfectly fits with LIP nonlinear filters, as proved in this chapter. Among LIP filters, cascade models, cascade group models and bilinear cascade models have been taken into account using both time-domain and frequency-domain adaptive algorithms. The derived models have been applied to the challenging problem of nonlinear acoustic echo cancellation.
Part 2 Part 2 is composed of four chapters (5–8) and it presents some of the most significant recent advances on nonlinear modeling by using adaptive methods based on kernel functions. This family of methods is closely related to the concept of LIP nonlinear filters, since it involves online kernel learning methods, which are implemented as linear learning methods with input data being transformed into a high-dimensional feature space. The difference with respect to the methods presented in Part 1 mainly lies in the feature space, which is induced by applying Mercer's theorem [19]. This property entails a strong and consolidated theory with several desirable features for nonlinear modeling, which have given rise, in the recent years, to an extensive literature on these models. This is the reason why we devote an entire part of the book to these methods.
One of most popular kernel-based methods is represented by the kernel adaptive filter (KAF). Most of the existing KAFs are obtained by minimizing the well-known mean square error (MSE), which is computationally simple and very easy to implement. However, the MSE may show a lack of robustness in the presence of non-Gaussian noises. Chapter 5, by Badong Chen et al., addresses this problem by leveraging the correntropy, which is a similarity measure involving all even-order moments, thus being robust to the presence of heavy-tailed non-Gaussian noises. The chapter shows that KAFs based on the maximum correntropy criterion (MCC) provide an effective solution for the modeling of those nonlinearities that bare nonstationarity and non-Gaussianity properties.
Kernel-based methods are also widely used in machine learning applications. One example is described in Chapter 6, by Yinan Yu et al., where kernel approximation is represented as a subspace learning technique for feature construction for pattern recognition. Kernel approximation aims at reducing the computational complexity, which belongs to the most challenging issue for kernels, since complexity does not scale well with respect to the training size. Considering the kernel approximation as an approximated subspace in a high-dimensional space, it is possible to extract feature vectors onto the approximated subspace, thus subsequently applying a linear learning technique. The chapter also introduces possible learning criteria for adaptive kernel approximation and suitable infrastructures for an efficient implementation.
The problem of the growing size of the kernels is addressed for a different field of applications in Chapter 7, by Pantelis Bouboulis et al. In particular, the chapter introduces an approach based on random Fourier features to approximate kernels without compromising performance. The approximation procedure of random Fourier features is applied to several online kernel-based schemes. More importantly, this rationale has also been applied to learning over distributed networks, in which several nodes collect the observations in a sequential fashion and each node communicates with a subset of nodes to reach a consensus for the overall solution.
The problem of inferring a function defined over the nodes of a network is also addressed in Chapter 8, by Vassilis N. Ioannidis et al. Nodal attributes can be represented as signals that take values over the vertices of the underlying graph, thus allowing the associated inference tasks to leverage node dependencies captured by a graph structure. This chapter presents a unifying framework for tackling signal reconstruction problems over graphs by using kernel-based learning both in the traditional time-invariant, as well as in the more challenging time-varying setting. Furthermore, a flexible model is also introduced based on online multikernel learning (MKL) that selects an optimal combination of kernels “on-the-fly”.
Part 3 Part 3 contains three chapters (9–11) and deals with algorithms and architectures for the modeling of complex nonlinear systems. Very often in real-world problems, one model is not sufficient to estimate an unknown nonlinear environment, due to the complexity of the nonlinearity or often to its variability during the modeling process, which may require a change of the parameter setting of the chosen model or even the change of the adopted nonlinear model. This leads to the use of complex architectures composed of different learning machines, which can even partially contribute to the overall nonlinear modeling. Complex architectures provide performance improvement, but also some issues like overfitting, gradient noise introduction and weak stability, among others. In this part, some recent advances on nonlinear modeling with multiple learning machines are presented, with the goal of achieving accurate nonlinear modeling while avoiding unwanted issues.
Chapter 9, by Nuri Denizcan Vanli et al., introduces a solution for overcoming issues like overfitting, stability and convergence, which can affect nonlinear methods. To this end, self-organizing trees (SOTs) are proposed to be used for regression and classification algorithms. SOTs adaptively partition the feature space into small regions and combine simple local learners defined in such regions. The cumulative loss is minimized by learning both the partitioning of the feature space and the local learners. The overall output of this architecture is achieved by a particular combination of the partition outputs. The proposed method can be applied to different constructions of the tree in order to solve a wide range of complex nonlinear problems, e.g., characterized by nonstationary environments, big data inputs, chaotic signals and very complex nonlinear functions.
A particular cause of complexity in nonlinear modeling may be represented by problems in distributed environments, e.g., wireless sensor networks and peer-to-peer networks. In such problems, a number of agents are required to estimate a common nonlinear model, based on received input data, by combining local computations and information coming from neighboring agents. Chapter 10, by Simone Scardapane et al., addresses this kind of problems, which can be distinguished in single-task problems, characterized by a common model for all the agents, and multitask problems, where each agent might converge to a slightly different model due to some specific factors. Several nonlinear adaptive methods can be used for this kind of architectures, and in this chapter an example is presented involving a kernel-based algorithm for the multitask case.
Nonlinear methods are often difficult to be tuned over an unknown nonlinearity. Moreover, complex nonlinearities, e.g., varying in time, can create even more uncertainty in the nonlinear model to be adopted. In order to tackle this problem, Chapter 11, by Luis A. Azpicueta-Ruiz et al., introduces combined filtering architectures for nonlinear modeling. One of the most useful approaches involves the combination of filters from the same family but having different parameter setting, which aims at simplifying the parameter selection and/or at improving the overall performance. A second combination approach is also presented in which, given a nonlinear architecture with different constituents (e.g., filters, filter partitions or general learning machines), only relevant nonlinear elements are adaptively chosen by optimizing the modeling performance. Several nonlinear methods can be adopted to be used in the presented combined schemes and some examples are shown in this chapter.
Part 4 Part 4 presents four chapters (12–15) dealing with nonlinear modeling by neural processing systems. Neural methods are powerful tools to model several kinds of nonlinearities that can hardly be modeled by other nonlinear methods. One example is represented by dynamical nonlinearities, which often occur in real-world applications. In this book, we show that neural-based models can be applied and used in different systems and for very different applications. In particular, neural systems are here used for nonlinear modeling problems for multidimensional data processing, for the behavioral analysis of spiking activities and, in the last two chapters, for adaptive control systems.
Chapter 12, by Yili Xia et al., deals with the processing of real-world multidimensional data, typically 3D or 4D, such as measurements from body sensor networks or from ultrasonic anemometers, which often entail nonlinear and nonstationary behavior. Since the quaternion domain offers a convenient means to process this kind of data, this chapter proposes quaternion-valued learning methods for the nonlinear modeling of multidimensional data. In particular, quaternion-valued echo state networks (QESNs) are introduced based on quaternion nonlinear activation functions with local analytic properties. QESNs provide efficient computational load for training and favorable analytical conditions in developing full quaternion-valued nonlinearities. Moreover, the proposed method is proved to be second-order optimal for the generality of quaternion signals. The method is evaluated with both simulated and real-world scenarios, including 3D body motion tracking and wind forecasting.
Chapter 13, by Dong Song et al., addresses the problem of identifying short-term and long-term synaptic plasticity from spiking activities. In particular, the chapter proposes a nonstationary dynamical modeling approach in which the synaptic strength is represented as input–output dynamics between neurons, the short-term synaptic plasticity is defined as input–output nonlinear dynamics, the long-term synaptic plasticity is formulated as the nonstationarity of such nonlinear dynamics, and the synaptic learning rule is the function governing the characteristics of the long-term synaptic plasticity based on the input–output spiking patterns.
In Chapter 14, by Hamidreza Modares et al., neural networks are used for the implementation of reinforcement learning algorithms for the adaptive ![]() control of nonlinear systems. In particular, this chapter introduces an adaptive optimal controller for nonlinear continuous-time systems without any knowledge about the system dynamics or the command generator dynamics. First, an augmented system is constructed from the tracking error dynamics and the command generator dynamics to introduce a new performance function. Then a reinforcement learning approach is used to solve the optimal tracking control problem. The proposed method offers several possibilities to be employed in real-world applications, including mobile robots, unmanned aerial vehicles and power systems.
control of nonlinear systems. In particular, this chapter introduces an adaptive optimal controller for nonlinear continuous-time systems without any knowledge about the system dynamics or the command generator dynamics. First, an augmented system is constructed from the tracking error dynamics and the command generator dynamics to introduce a new performance function. Then a reinforcement learning approach is used to solve the optimal tracking control problem. The proposed method offers several possibilities to be employed in real-world applications, including mobile robots, unmanned aerial vehicles and power systems.
The optimal adaptive control problem is also addressed in Chapter 15, by Biao Luo et al., but with reference to distributed parameter systems (DPSs). The resulting problem is described by highly dissipative nonlinear partial differential equations. The proposed method exploits empirical eigenfunctions of the DPS and the singular perturbation technique to obtain a finite-dimensional slow subsystem of ordinary differential equations that accurately describes the dominant dynamics of the DPS. Then the optimal control problem is reformulated on the basis of the slow subsystem that leads to solve a Hamilton–Jacobi–Bellman equation by using adaptive dynamic programming methods based on neural networks. An adaptive optimal control method based on policy iteration is developed for partially unknown DPSs.
1.4 Further Readings
Topics included in this book, described in the previous section, aim to provide an overview on the recent advances about adaptive learning methods for nonlinear system modeling. However, several noteworthy works on this topic have been populating the literature of the very last years. Among these works, we want to mention some related to the following aspects of nonlinear modeling: LIP nonlinear filters [20–24], time series modeling [25–28], Bayesian learning methods [29,30], kernel-based methods [31–36], nonlinear filtering architectures [37–41], nonlinear dynamic systems [42–44] and nonlinear system control [45–49].