
Introduction
Abstract
This chapter outlines the contents of the book and provides a brief history of automation, differentiating between process and discrete automation. To this end, the chapter surveys the history of industrial robots from the first installation in the 1960s onward, outlining the key milestones in the development of industrial robot technology. The chapter also discusses the development of robot applications, particularly those driven by the automotive industry, as well as the effects of robot use on employment.
The advent of industrial robots in the 1960s heralded an exciting period for manufacturing engineers. These machines provided them an opportunity to automate activities in ways that had previously been infeasible. In 1961, General Motors first applied an industrial robot in a manufacturing process. Since that time, robotic technology has developed at a fast pace, and today’s robots are very different from the first machines in terms of performance, capability, and cost. Over 2 million robots have been installed across many industrial sectors, and a whole new automation sector has developed. These robots have provided significant benefits to manufacturing businesses and consumers alike. There are many challenges involved in achieving successful applications, however, and over the last 50 years, those who have led the way have learnt many lessons.
The challenges are largely caused by the limitations of robots in comparison with humans. Although they can perform many manufacturing tasks as well as, or even better than, humans, robots do not presently have the same sensing capabilities and intelligence as humans do. Therefore, to achieve a successful application, these limitations have to be considered, and the application must be designed to allow the robot to perform the task successfully.
This book provides a practical guide for engineers and students hoping to achieve successful robot implementation. It is not intended to provide exhaustive details of robot technology or how robots operate or are programmed. It is intended to convey lessons learnt from experience, offering guidance particularly to those who are new to the application of robots. The fear of problems and unfulfilled expectations is often the largest barrier to the introduction of robots. Even given the current population of robots, many companies throughout the world can still benefit from adopting this technology. Their reticence to incorporate robotics is largely due to a fear of the unknown, a view that robots are “fine for the automotive industry but they are not for us”. This mistaken view holds back the growth and profitability of many companies that have not embraced robot technology nor gained the benefits it can bring.
1.1 Scope
As mentioned above, this book is intended to be a guide to the practical application of robot systems. Many academic books describe the development and current technologies of robotics. Many examples of applications are also supplied by robot manufacturers and system integrators via the internet. Yet, few sources cover all the important aspects of the implementation of robot systems. Many experts have developed this knowledge through experience, but most have not had the time to impart this experience to others in this way.
In the following pages, we introduce automation. Knowledge of automation varies across different industry sectors. Therefore, it is important to understand when robots are appropriate and, most importantly, when they are not. The term robot also conjures up many different images from simple handling devices to intelligent humanoid machines. So, we provide an explanation for the term industrial robot, which then defines the context for this book.
Although we do not intend to provide a deep understanding of robot technology, we do offer an introduction to the benefits of using robots, as well as robot configurations, performance, and characteristics. This knowledge is required as a starting point for all applications because it serves as the basis for selecting a suitable robot for a particular application. This is covered in Chapter 2.
A robot consists of a mechanical device, typically an arm and its associated controller. On its own, this device can achieve nothing. In order to perform an application, a robot must be built into a system that includes many other devices. Chapter 3 provides a brief outline of the most important equipment that can be used around a robot.
Chapter 4 then reviews typical applications. Again, we do not intend this review to be exhaustive. Instead it provides examples of a range of robot applications throughout various different industry sectors. These are used to illustrate the main issues that must be addressed when implementing a robot solution, particularly those issues relevant to a specific sector or application.
The remainder of the book outlines a step-by-step process that can be followed in order to achieve a successful application. First, in Chapter 5, we discuss the initial process of developing the solution, although the process is normally iterative, with the actual solution often not finalised until the financial justification has been developed. A key element of any successful implementation is the definition of the system specification. In most cases, a company subcontracts the actual implementation of the robot solution to an external supplier, such as a system integrator, and this supplier must have a clear understanding of both the requirements for the system and the constraints under which it is to perform. These are defined in the User Requirements Specification. Without this specification, the chance of failure is greatly increased due to the lack of a clear understanding between the customer and supplier. The purpose of the user requirements specification is to convey this information, and we discuss the development of this key document in Chapter 6.
Of course, the implementation of a robot system must provide benefits to the end user. These benefits are often financial, and the financial justification must be clearly identified at the commencement of the project. Normally, a company will not proceed with the purchase of a robot system, as with most other capital investments, unless the financial justification is viable. For this reason the final decision maker, within the end user, requires a compelling financial justification. Therefore, the development of this justification is as important as the engineering design of the solution. This is not just a case of determining labour savings. Robot systems also provide many other benefits that can be quantified financially. In many cases, robot systems are not implemented, because the justification does not satisfy the financial requirements of the business. However, a detailed analysis presented in the correct way can improve the justification. This is covered in Chapter 7.
All successful projects require a methodical approach to project planning and management. In this respect, robot systems implementation is no different, although specific issues must be addressed, particularly for those companies undertaking an initial implementation of robot technology. Chapter 8 provides a guide to the successful implementation of a robot system from the initial project plan, through supplier selection to the installation and operation of the robot system. In particular, the chapter considers common problems and how they can be avoided.
Finally, Chapter 9 summarises the implementation process. This chapter also provides some thoughts as to how engineers and companies that are new to robot technologies might benefit from the development of an automation strategy. This strategy offers a plan from which manufacturers can develop their expertise and automation use as part of the overall company goals.
1.2 Introduction to Automation
Automation can be defined as “automatically controlled operation of an apparatus, process, or system by mechanical or electronic devices that take the place of human labour”. Basically, automation is the replacement of man by machine for the performance of tasks, and it can provide movement, data gathering, and decision making. Automation therefore covers a very wide array of devices, machines, and systems ranging from simple pick-and-place operations to the complex monitoring and control systems used for nuclear power plants.
Industrial automation originated with the Industrial Revolution and the invention of the steam engine by James Watt in 1769. This was followed by the Jacquard punch card-controlled loom in 1801 and the cam-programmable lathe in 1830. These early industrial machines can be more appropriately defined as mechanisation because they were exclusively mechanical devices with little programmability. In 1908, Henry Ford introduced mass production with the Model T, and Morris Motors in the UK further enhanced this process in 1923 by employing the automatic transfer machine. The first truly programmable devices did not appear until the 1950s, with the development of the numerically controlled machine tool at MIT. General Motors installed the first industrial robot in 1961 and the first programmable logic controller in 1969. The first industrial network, the Manufacturing Automation Protocol was conceived in 1985, and all of these developments have led to the automation systems in use today.
Robots are a particular form of automation. To understand the role robots can play within a manufacturing facility, one must distinguish between the different types of automation. The first major distinction is between process and discrete automation. Discrete, or factory, automation provides the rapid execution of intermittent movements. This frequently involves the highly dynamic motion of large machine parts that must be moved and positioned with great precision. The overall production plant generally consists of numbers of machines from different manufacturers that are often independently automated. In contrast, process automation is designed for continuous processes. The plant normally consists of closed systems of pumps used to move media through pipes and valves connecting containers in which materials are added and mixing and temperature control takes place. In simple terms, discrete automation is normally associated with individual parts, whereas process automation controls fluids.
The control systems for chemical plants and oil refineries provide examples of process automation. The facilities used by the automotive industry represent discrete automation, and some facilities in the food and beverage sector require both forms of automation. In these facilities, process automation provides the basic product (such as milk), and factory automation then provides the handling when the product has been put into discrete packages, the bottles or cartons.
Therefore, robots are a form of discrete or factory automation. Within this group the types of automation can be categorised as hard or soft automation. Hard automation is dedicated to a specific task, and, as a result, it is highly optimised to the performance of that task. It has little flexibility but can operate at very high speeds. An excellent example of hard automation is cigarette-manufacturing machinery. Soft automation provides flexibility. It can either handle different types of product through the same equipment or be reprogrammed to perform different tasks or operate on different products. The trade-off is often performance, in that soft automation is not as optimised, and therefore, it cannot achieve the same output as dedicated, hard automation. Robots are a very flexible form of soft automation because the basic robot can be applied to many different types of application.
1.3 Evolution of Robots
The word “robot” was first used by the Czech playwright Karel Capek in his play “Rossum’s Universal Robots”. It is derived from the Czech word “robota” meaning slave labour. This science fiction play, from 1920, portrayed robots as intelligent machines serving their human masters but ultimately taking over the world. The popular concept of robots has emerged from this beginning. Other writers developed the ideas further. In particular, in the 1940s, Isaac Asmiov created three laws of robotics to govern the operation of his fictional robots (Engelberger, 1980):
1. Robots must not injure humans, or through inaction, allow a human being to come to harm.
2. Robots must obey the orders given by human beings except where such orders would conflict with the first law.
3. Robots must protect their own existence as long as this does not conflict with the first or second law.
Although these laws are fictional, they do provide the basis used by many current researchers developing robot intelligence and human–robot interaction.
Robots come in many forms. Due to the high profile of fictional robots, such as C3PO from Star Wars, the public often associates robots with intelligent, humanoid devices, but the reality of current robot technologies is very different. The robot community categorises robots into two distinct application areas, service robots and industrial robots. Service robots are being developed for a wide range of applications, including unmanned aircraft for the military, machines for milking cows, robot surgeons, search and rescue robots, robot vacuum cleaners, and educational and toy robots. Due to the wide range of applications and environments in which they operate, the machines vary greatly in terms of size, performance, technology, and cost. The use of service robots is a growing market, largely addressed by companies other than those that supply the industrial sector. There is some cross over in terms of technologies with industrial robots, but the machines are very different.
This book focuses on the use of robots in the industrial sector. These machines have been developed to meet the needs of industry and therefore they have much less variation than do service robots. The following is an accepted definition (ISO 8373) for an industrial robot (International Federation of Robotics, 2013).
An automatically controlled, re-programmable, multipurpose manipulator programmable in three or more axes, which may be either fixed in place or mobile for use in industrial automation applications.
This provides a distinction between robots and other automation devices such as pick-and-place units, machine tools, and storage-and-retrieval systems.
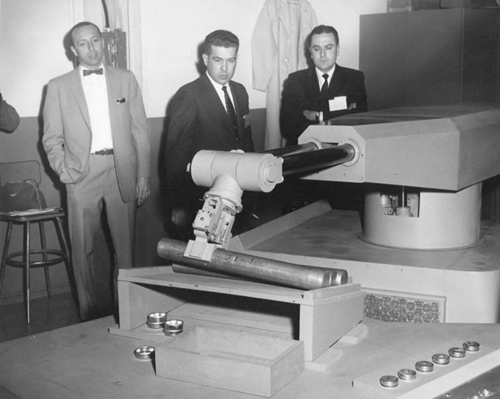
The industrial robot industry began in 1956 with the formation of Unimation by Joseph Engelberger and George Devol. Devol had previously registered the patent “Programmed Article Transfer”, and together, they developed the first industrial robot, the Unimate (Figure 1.1). Unimation installed the first robot into industry for the stacking of die cast parts at the General Motors plant in Trenton, New Jersey. This robot was a hydraulically driven arm that followed step-by-step instructions stored on a magnetic drum. The first major installation was again at General Motors, in this case, at the Lordstown assembly plant in 1969, where Unimation robots were used for spot welding (Figure 1.2). These robots enabled automation to address more than 90% of the spot welds, whereas, previously, only 40% had been processed automatically, with the remainder being manual. Trallfa, Norway, offered the first commercial painting robot in 1969, following their earlier development for in-house use, spray-painting wheelbarrows. Robot production then commenced in Japan, following an agreement between Unimation and Kawasaki in 1969, and by 1973, there were 3000 robots in use worldwide.

In 1973, KUKA, Germany, developed their own robots, having previously used Unimation machines. These robots were the first to have six electromechanical driven axes. Also in that year, Hitachi became the first company to incorporate vision sensors to allow the robot to track moving objects. This robot fastened bolts on a moving mould for the production of concrete piles. By 1974, the first commercially available robot with a minicomputer-based controller was available, the Cincinnati Milacron T3, and also in that year, the first arc welding robots were installed. These were produced by Kawasaki for the welding of motor cycle frames.
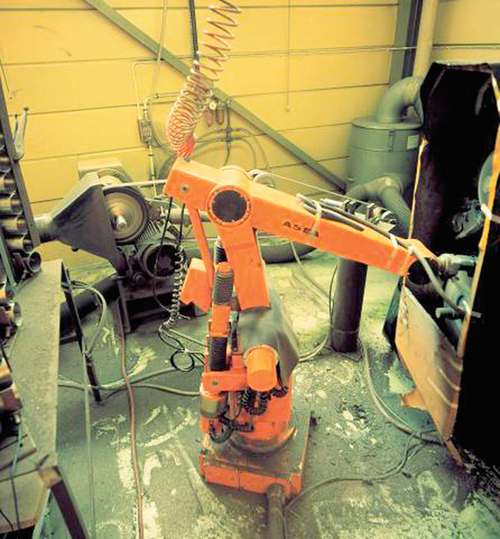
The first fully electric microprocessor-controlled robot, the IRB 6, was launched by ASEA in Sweden in 1974. This machine mimicked the human arm and had a carrying capacity of 6 kg. The first unit was installed for the polishing of stainless steel tubes (Figure 1.3). In 1975, the Olivetti SIGMA robot, based on a Cartesian design (see Section 2.1), was one of the first to be used for assembly applications, and in 1978, Unimation, with support from General Motors, developed the programmable universal machine for assembly (PUMA). Also in 1978, the first selective compliance assembly robot arm (SCARA) (see Section 2.1) was developed. Both the PUMA and SCARA designs were developed for assembly applications with limited carrying capacity but good repeatability and high speed.
In 1979, Nachi, Japan developed the first heavy-duty electrically driven robots. These machines provided improved performance and reliability over the hydraulically driven robots, and electric drives became the industry standard. In 1981, the first gantry robot was introduced, providing a much larger range of motion than could be achieved with conventional designs. By 1983, 66,000 robots were in operation.
The first direct-drive SCARA robots were launched in 1984 by Adept, USA. The motors were directly connected to the arms, eliminating the need for intermediate gears, chains or belts. The simplified design provided high accuracy and improved reliability. In 1992, the first Delta configuration robot was installed for the packaging of pretzels into trays. This design was subsequently adopted by ABB, Sweden, for their FlexPicker robot, which, at the time, was the world’s fastest picking robot, operating at 120 picks per minute. By 2003, there were 800,000 robots in operation.
By 2004, the capability of robot controllers had increased significantly, and Motoman, Japan, launched a new controller that provided synchronised control of up to 38 axes and could control four robot arms simultaneously. Other controller developments included the use of PC-based systems running Windows CE and touch screens and colour displays for the teach pendants.
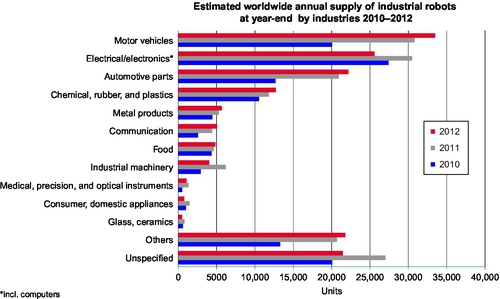
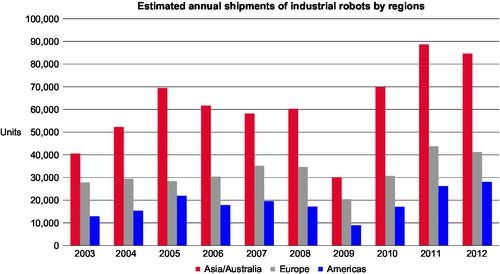
Many of the developments resulted from the needs of the automotive industry. Since the first installation at General Motors, the automotive sector has been the major user of industrial robots, and it remains the largest customer for the robot industry. However, today’s robots are also used in a very wide range of other sectors, from food to aerospace. The International Federation of Robotics (IFR) has been collecting robot installation data since 1988, and it publishes the annual statistics in “World Robotics” (International Federation of Robotics, 2013). The widespread use of robots across many industry sectors is illustrated in Figure 1.4. Robots are also in use in every industrialised country, and Figure 1.5 illustrates the growth of robot applications across the world.
1.4 Development of Robot Applications
There is a very broad range of applications for robots across all sectors of manufacturing, as well as in other sectors, including the film and entertainment industries. The IFR report “World Robotics” states that, by the end of 2012, over 1 million robots were to be in operation (International Federation of Robotics, 2013). Of these, close to 50% were estimated to be in use in the automotive industry, including automotive components. The sector with the second largest number of robotic applications was the electrical and electronics industry with about 18%, which was followed by the plastics and chemicals industries at 10% and the metals and machinery sector with 9%. The automotive sector has always been the leading user of robots, and as a result, it has had a major impact not only on the development of robots but also the development of their applications.
1.4.1 Automotive Industry
The initial applications in the automotive industry were mainly spot welding to form the car body from the individual pressings. The repeatability of the robots, combined with their dexterity, allowed the automation of the large numbers of manual welding stations. These applications were developed from the manual approach, and therefore, they tended to include transfer devices moving the parts between welding stations, with a number of robots manipulating welding guns at each station (Figure 1.6). The spot welding equipment was based on the manual packages with remote transformers and heavy cables providing the power to the welding guns. The early robots were hydraulic to provide the carrying capacity required, although these were quickly replaced by electric servo-driven machines because the electric machines provided improved performance and reliability. As the weight carrying capacity of the electric robots increased, transformer guns were developed in order to integrate the transformer within the weld gun, which removed the need for the heavy-duty cables. These advances increased the reliability of the operation because the cables did not wear as quickly as those used previously.

More recently, robots have been used to handle the parts, particularly for the subassemblies, through the weld cell, using either fixed guns or more robots with weld guns. This has provided enhanced flexibility, and it has also increased the number of robots. The drivers for this new approach have been the shorter life span for car designs and also the larger number of variants being produced at a single facility.
The technology and performance of the welding equipment has also been improved. For example, some plants have introduced servo-driven weld guns, with the operation of the gun being fully controlled by the robot. These machines provide the benefit of reduced cycle times because the closing and opening of the gun can be initiated before the robot reaches the required positions and the size of the opening can be controlled for specific sequences of spot welds. Similar operations, such as self-pierce riveting and stud welding, have also been automated in large numbers using robots. In addition, industry has shown increasing interest in laser welding, with some systems in use. These tend to be more expensive systems, but the performance and results justify the increased cost in some cases. Dedicated laser welding robots have been developed to provide integrated solutions for the feed of the laser to the head, increasing reliability as well as performance.
Painting and underbody sealing are other applications that were introduced at an early stage. These were driven by the unpleasant nature of the applications and the need to achieve consistent quality. Paint applications initially used hydraulic robots because the environment of the paint booth, with high concentrations of solvent, would not allow electric drives. The development of explosion proof paint robots solved this problem and significantly improved the performance and ease of use of painting robots. The initial robots used a lead teach principle, where the painter would actually hold the robot arm and take it through the required path, often whilst painting. The robot would record this path and then repeat it. The merit of this approach is that it allowed paths to be created quickly, but these robots had limited capability for path editing. Therefore, the development of complex programmes could be very time-consuming. Off-line programming, using a simulation of the robot, booth, and car body, quickly became the preferred approach and this approach is now very effective and widely used.
Within a typical spray booth, a number of other automated devices are used for painting, including reciprocators carrying spray guns and also electrostatic bell machines. These are very appropriate for the coverage of the exterior surfaces, if the line is continuously moving. Robots were often used in addition to these machines to provide the coverage for the interiors, including the engine bays, boot and door shuts. To provide access to these areas, opening devices were developed to operate in conjunction with the paint robots. Also servo-driven tracks allowed the robot to follow the car body as it moved through the booth.
Today, automotive robot paint systems are fully integrated process solutions, with closed-loop control of the paint and air services. This provides the ability to adjust the painting parameters during a path to provide the optimum results. In addition, colour changers are integrated within the robot arm to minimise the time and paint wastage during colour changes. Robots can also be equipped with a range of paint applicators, including air spray, electrostatic air spray, and electrostatic bells. Each of these has specific advantages, and therefore, the robot can be fitted with the optimum equipment for a particular application.
Underbody sealing was an unpleasant manual application for which robots were applied. In the early days, paint robots were utilised due to the ease of programming. However, these applications are now normally achieved using standard robots. Robots also addressed seam sealing due to the need for precise application of the sealer to the joints between the panels on the car body. This required the use of standard robots to achieve the precision required. Vision systems have been used to identify the position of the car body to ensure that the system can accommodate variations in this position and maintain the precise application of the sealant bead. Over time the applicators were improved to include the use of closed-loop flow control to provide more precise control of the application, as well as the ability to vary the output of the applicator to suit the seams to be addressed. Adhesive applications were also quickly introduced, again driven by quality. These included direct glazing, applying the adhesive and then fitting the glass to the car body, and various applications through which adhesive is applied to panels prior to assembly, as with the bonnet inner and outer panels.
The panels for the car bodies are produced within press shops. These may be within the automotive original equipment manufacturer (OEM) or one of their tier 1 suppliers. Robots have been used on press lines for many years to provide the transfer of panels between presses. These robots replaced either manual transfer or the more dedicated “iron hand” and other mechanical devices. In some cases, the press lines have been developed further, and now large transfer presses include their own handling equipment, with robots being used to load and unload these machines. However, there is still a place for the more traditional press line, which often uses robots between the presses.
The introduction of robots to the final assembly operations was slower than it was in the body shops largely because of the difficulties in handling the parts involved and the need to work inside the car body. However, many applications now have the potential to be automated using robots, and a company’s decision as to the route (e.g., manual, semi-automated or fully automated using robots) is made on the basis of cost rather than technical barriers.
Similarly, the uptake of robots in engine assembly operations was initially slow. These were generally high-volume and highly automated facilities that used more dedicated equipment. As the need for flexibility has increased, the benefit of using robots has led to significant use within modern engine assembly facilities. In addition to general handling and the transfer of parts between machines, applications include assembly and deburring.
1.4.2 Automotive Components
The automotive components sector has followed the automotive industry in the use of robots. They have embraced robotic technology as a means to achieving the quality and flexibility required by their customers, the automotive OEMs. The applications across the sector are more varied due to the range of different parts being produced. In most cases, the robot cells tend to be standalone rather than elements of a large automation system, because of the smaller number of operations required to produce a completed assembly. The applications generally fall into a number of categories: plastics, metal working, electrics and electronics, and assembly.
There are many plastic parts required for a vehicle, including both interior parts, such as dash panels and trim, and exterior parts, such as bumpers, door handles, and spoilers. The robot applications used to produce these parts include injection mould machine unloading, routing, water jet cutting, assembly (including bonding and welding) and painting.
The metal working applications include the production of subassemblies for the vehicle body, as well as other large items such as the exhaust system. In terms of subassemblies for the car body, such as suspension mountings, the applications include press loading and unloading applications, as well as spot and arc welding. Arc welding is the main application of robots in exhaust system manufacturing, during which the machines assemble various parts of the exhaust system, such as pipes, flanges, mounting brackets, silencer boxes, and catalytic converters. It is worth noting the majority of arc welding for automotive parts is performed by the component suppliers rather than in the main car plants.
There are many mechanical parts that ultimately become part of the powertrain. Applications here include machine tool loading and unloading, grinding, deburring and other metal finishing applications. Similarly, the lights, air conditioning units, electrics, and other subassemblies within a car are assembled and tested using a variety of robot applications.
1.4.3 Other Sectors
The electrical and electronics industries have seen strong growth in the use of robots over recent years. Many dedicated machines are currently in use, for example, populating printed circuit boards. However, robots are used for machine loading and unloading, testing, assembling larger components and many other applications. The growth has been largely driven by the increased production of consumer electronic devices such as mobile phones and tablets, with the majority of this activity taking place in Asia.
The food industry has been seen as a large potential user for robots for many years, mainly due to the high number of manual operations involved in this sector. However, there has not yet been a widespread take off in the number of robots used, and a number of major challenges have yet to be fully addressed. Firstly, the cost of labour is lower than it is in other sectors, such as automotive, making the justification of automation more difficult. The products are very often organic and can be difficult to handle, in addition to being inconsistent in size and shape. Hygiene rules, particularly for operations on naked food products, also require specific standards for the automation equipment, such as wash-down, which again increases cost. The ultimate goal would be to achieve a fully automated food processing plant that provides much improved hygiene, because the main source of contaminants, the workforce, is removed.
1.4.4 Future Potential
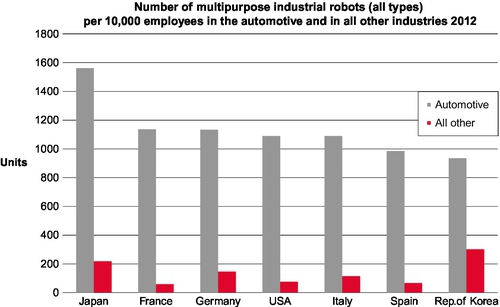
One of the analyses performed by the IFR is the calculation of robot density, or the number of robots per 10,000 employees in manufacturing industry. Figure 1.7 shows a comparison between the robot density of the automotive sector and all other industry sectors, for the countries with the largest robot populations. This demonstrates the significant potential for robots throughout worldwide industry. If the non-automotive industries applied robots in the same ratio as the automotive industry, this would result in an enormous growth in the number of installations. Even in the automotive industry, there is still significant potential for new robot applications, particularly in trim and final assembly operations, which have not yet been addressed. There is also very large potential within the developing economies, and particularly within China, Brazil and India. As the affluence and requirements of the local consumers grow, they will increasingly demand products that will drive the development of industries to provide those products, in turn leading to greater use of robotics.
1.5 Robots Versus Employment
One of the common misconceptions regarding robots is that incorporating them in the workplace leads to unemployment. It is often true that a specific robot installation will replace certain jobs. However, the automation of those tasks increases the competitiveness of the company and leads to growth, therefore producing more jobs. Normally, robots are employed for dirty, dangerous, or demanding tasks, the so-called 3Ds. Therefore, the jobs they replace are less suitable for workers. The new jobs that are created (e.g., programming or maintaining the robot systems) require higher skills, are more rewarding, and normally have higher rates of pay.
Ever since the Industrial Revolution, the trend regarding employment in industry has always been to reduce the number of workers directly employed in production. Every new development has required less direct manual input for the production process. The overall affluence created by successful manufacturing has supported the creation of jobs in service sectors. This trend will continue and robots are no different from other machines in this regard.
The improved quality and reduction in cost of manufacture leads to market growth because more people can afford and wish to buy the products. This again provides a positive effect on employment. As an example, if cars were still manufactured using the same techniques as 50 years ago, they would be less reliable and more expensive. Therefore, sales would be lower and the automotive industry smaller. For some products, such as the latest smart phones and tablets, the manufacture of these at prices consumers could afford would not be possible without the use of automation and robots.
All of these factors have been captured by an IFR study in 2011 concluding that the 1 million robots in use throughout the world in 2011 had led to the creation of nearly 3 million jobs. That is nearly three jobs for every robot. This did not include jobs that were created or retained in indirect roles such as the distribution or sale of products. The study also forecast that this trend would continue.
Thus, all companies must actively consider the use of automation and robots in order to ensure that they maintain or improve their competitive positions. This is particularly true in the higher-wage economies in which the skills and attributes of the workforce need to be fully utilised in performing added-value tasks rather than performing mundane jobs. Today’s economy is truly global, and all businesses need to be aware that their competition, which may well be overseas, could be improving their operations and strengthening their competitive position. Ever-increasing health and safety requirements also demand that attention is paid to those tasks that are both arduous and dangerous.
The drive to apply robots will increase, and all companies need to develop the skills and expertise required to identify automation opportunities and to implement the appropriate solutions. The experience of those who have implemented successful robot systems is often based on lessons learnt from mistakes that have been made in the past. By the application of the correct approach, as outlined in this book, these mistakes can be avoided, and robot systems can be installed in ways that meet the expectations of the user. These then provide a positive contribution to manufacturing operations, improving both the product and the workplace, for the benefit of all the stakeholders in a business, including the workforce, the owners, and the customers of that business.