CHAPTER 2
METHOD OF EULER
Essentially all concepts introduced in Chapter 1 have their counterpart in this chapter. We introduce the simplest difference method that one can use to approximate an initial value problem. Most of the fundamental concepts needed to understand numerical approximations to differential equations follow the concepts introduced here for the method of Euler. These concepts are more complicated; therefore, one should understand the procedures for differential equations before one starts with the difference approximations. New concepts are accuracy, truncation error, and stability region. Also, a discrete version of Duhamel’s principle is discussed. General one-step methods are defined and a section is devoted to tests of correctness of a program.
2.1 Explicit Euler method
There are many methods of computing approximations to the solution of an initial value problem. The explicit Euler method,1 which we discuss here, is the most easily understood and implemented. To describe it, let us first introduce the concepts of grid and grid function.
Starting form the initial time in our problem, say t = 0, we divide the t-axis into subintervals of length k > 0 and obtain a grid (see Figure 2.1). The endpoints tn = nk, n = 0, 1, 2, … of the subintervals are called grid points. A grid function gn = g(nk) is a function that is denned on the grid. The explicit Euler method for an initial value problem
Figure 2.1 Grid starting at t = 0.

will be derived below, but we start with the particular example
and use it for an error discussion.
For simplicity, let us assume that μ ≠ λ (i.e., we do not have a case of resonance). By Section 1.1 we know the exact solution,
(2.2) ![]()
Let us now replace (2.1) by a difference approximation. By Taylor expansion, we have for any smooth function y(t),
(2.3) ![]()
If y(t) is the solution of the differential equation (2.1), we can replace dy/dt by λy + eμt and obtain
![]()
If we neglect the ![]() (k2) term and write vn instead of yn, we obtain the explicit Euler method for (2.1):
(k2) term and write vn instead of yn, we obtain the explicit Euler method for (2.1):
It is clear that the difference equation (2.4) can be solved recursively: Once vn is known for some n, (2.4) can be used to calculate vn+1, etc. Thus, (2.4) and (2.5) determine a unique grid function vn, n = 0, 1, 2, …. It is also clear that this grid function depends on the step size k, but this is suppressed in our notation.
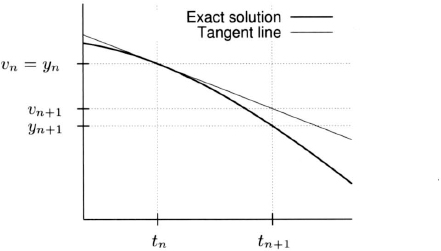
The exact solution to an initial value problem can be thought, geometrically, to be the integral curve, in the (t, y) plane, of the direction field defined by the equation that passes through the initial point (t0, y0). One can think of Euler’s explicit method, geometrically, as a method that computes the point (tn+1, vn+1) by following the tangent line to the graph of the exact solution that passes though the point (tn, vn) (see Figure 2.2).
Figure 2.2 Explicit Euler method starting with vn = yn.
It is not difficult to derive the explicit Euler method for general equations:
Taylor expansion gives us
Neglecting terms of order ![]() (k2), we obtain the explicit Euler method.
(k2), we obtain the explicit Euler method.
Definition 2.1 The explicit Euler method (or simply the Euler method) that approximates problem (2.6) is

2.2 Stability of the explicit Euler method
Consider the initial value problem
If one approximates this problem with Euler’s method, one expects that the difference between the approximate solution and the exact solution to (2.7) will approach zero as k → 0. However, in actual numerical computations, one might choose one or a few step sizes but cannot send k → 0. In a concrete application, how should one choose k? There are two aspects that one needs to consider to make a good choice: the stability and the accuracy of the approximation. The latter aspect is determined by the size of the truncation error.
We start the discussion of these concepts with an example. Consider the initial value problem
Let us approximate (2.8) by the explicit Euler method:
(2.9) ![]()
The exact solution of (2.8),
![]()
decays rapidly to zero for increasing t. On the other hand, if k > 2/100, the numerical solution vn increases in absolute value with increasing n and does not resemble yn at all. For the example above, a reasonable requirement is to choose k so small the the solution vn of the difference approximation does not grow in absolute value with increasing n. Thus, one needs to choose k ≤ 2/100.
For the more general case,
we have the following result.
Lemma 2.2 Approximate (2.10) by the explicit Euler method:
![]()
If y0 ≠ 0, we have
if and only if
Proof: Clearly, the solution vn of the difference equation is given by
![]()
If |1 + λk| > 1, the absolute value of vn grows with increasing n. On the other hand, if |1 + λk| ≤ 1, then (2.11) holds.
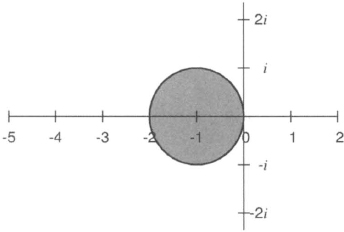
Definition 2.3 The set of all complex numbers μ = λk for which the estimate (2.12) holds is called the stability region of the explicit Euler method.
Clearly, for the explicit Euler method, the stability region consists of a closed disk with radius λk = 1 and center in λk = −1 in the complex μ = λk plane (see Figure 2.3).
Figure 2.3 The shadowed disk is the stability region of the explicit Euler method in the complex plane.
2.3 Accuracy and truncation error
We start our discussion about the accuracy of the Euler approximation by defining the truncation error.
Definition 2.4 Consider the initial value problem
and approximate it by the explicit Euler method:
![]()
Let y(t) denote the solution of the initial value problem in some interval 0 ≤ t ≤ T and substitute yn = y(tn) into the difference equations. Then the truncation error Rn for this method is defined as
(2.13) ![]()
Remark 2.5 It is clear that the truncation error Rn depends on the step size k and on the solution y(t) under consideration. We usually suppress this in our notation.
The truncation error measures how well the solution y(t) of the differential equation satisfies the difference equations that are used to compute the numerical approximation vn. kRn represents the terms that we have neglected when deriving the method.
As an example, consider the initial value problem
for a linear equation, and approximate it by the explicit Euler method:
By Taylor expansion,
(2.16) ![]()
Therefore,
with

Thus, the method is first-order accurate, and for k → 0 the truncation error converges to zero. The convergence is linear with k and uniform in t; that is, as the analytic solution y(t) is smooth in a given time interval t ![]() [0, T] (in this linear example, T can be chosen as large as one pleases), we have
[0, T] (in this linear example, T can be chosen as large as one pleases), we have
![]()
Thus,
![]()
and we say that the explicit Euler method is accurate of order 1.
2.4 Discrete Duhamel’s principle and global error
We now relate the stability and truncation error to the global (actual) error en = yn − vn. We start by considering the linear initial value problem of the example given in Section 2.3. Subtracting (2.15) from (2.17), we obtain
![]()
Thus, the error is determined recursively by
From this recursive error equation we can derive an explicit formula for the error. The result (2.21), given below, is analogous to (1.13) and constitutes an example of Duhamel’s principle for difference equations. Let
denote the solution operator of the homogeneous difference equations corresponding to (2.19). We have
Lemma 2.6 The solution en of the error equation (2.19 has, in terms of the solution operator (2.20), the representation

Proof: We use induction in n. For n = 1 the formula is true, because
![]()
Assuming that (2.21) holds for n, we now show its validity for n + 1. First note that
![]()
and
![]()
which is the correct expression for en+1.
Let us now assume that Re λ < 0 in example (2.14). Then, if we choose the step size k small enough, we have |1 + λk| ≤ 1 (i.e., λk lies in the stability region of the method). Under this assumption we can estimate the error.
Theorem 2.7 Assume that λk belongs to the stability region of the method. Then the error en = yn − vn satisfies the estimate

Proof: First note that e0 = 0 in (2.21). If λk belongs to the stability region, |Sk(n − 1, m)| ≤ 1, and the estimate follows from (2.21) and (2.18).
Remark 2.8 On local and global accuracy. Since a term of order ![]() (k2) has been neglected in deriving the Euler method, one says that the method is “locally accurate of order k2”, that is, if the exact solution to the equation and its Euler approximation coincide at time t, the difference between them at time t + k vanishes quadratically with k ask goes to zero. On the other hand, the global error in any finite interval is only
(k2) has been neglected in deriving the Euler method, one says that the method is “locally accurate of order k2”, that is, if the exact solution to the equation and its Euler approximation coincide at time t, the difference between them at time t + k vanishes quadratically with k ask goes to zero. On the other hand, the global error in any finite interval is only ![]() (k) and not
(k) and not ![]() (k2). This is so since to get to time t ≃ 1, the right-hand side of (2.22) adds
(k2). This is so since to get to time t ≃ 1, the right-hand side of (2.22) adds ![]() (1/k) terms of order
(1/k) terms of order ![]() (k2) and
(k2) and ![]() (k2)
(k2)![]() (1/k) =
(1/k) = ![]() (k).
(k).
The estimate for the global error just obtained is not necessarily sharp: the best possible estimate that one can get for a linear problem. However, it has the property that one can generalize it to nonlinear problems. To see this, let us estimate the error when one approximates a nonlinear problem:
where the function f(y, t) is assumed to be smooth. Assume that the solution y(t) of (2.23) exists and is smooth in some time interval [0, T). Let us approximate our problem with the explicit Euler method
![]()
As above, we have for the truncation error,
![]()
Thus, the error en = yn − vn solves

By Taylor expansion,

Neglecting the quadratic terms and using the notation fy(vn, tn) = λn, we obtain
The solution operator of the homogeneous equation corresponding to (2.24) is now
With this definition of Sk(n, m) the representation (2.21) of Lemma 2.6 holds. Assume now that Re λj < 0 [which is an assumption on df(y, t)/dy] and choose k so that λjk belongs to the stability region for all j. Then
![]()
and the error estimate of Theorem 2.7 also holds for the nonlinear case.
Exercise 2.1 Consider the initial value problem
with λ = −1, F(t) = sin(2πt).
![]()
and write a computer program that implements this method for using three different time-step values: k = 0.1, 0.01, 0.001. For each value of k, display the solution as a graph.
Exercise 2.2 Consider the initial value problem
![]()
Plot ![]() vs. k and analyze the plot for small k. Is there a linear bound for
vs. k and analyze the plot for small k. Is there a linear bound for ![]() (k)? Is there a quadratic bound for
(k)? Is there a quadratic bound for ![]() (k)?
(k)?
2.5 General one-step methods
The one-step methods are a large class of methods generalizing Euler’s method that approximate the initial value problem
and that compute the approximate solution at time tn+1 based on the value of the approximation at tn only.
Definition 2.9 A one-step method to approximate (2.26) is a method of the form
The function Φ(v, t, k) is called the increment function of the method.
The simplest choice of increment function is Φ(v, t, k) = f(v, t), leading to Euler’s explicit method.
Definition 2.10 A method (2.27) is called locally accurate of order p + 1 if
where yn = y(tn) is the exact solution y(t) of (2.26) restricted to the grid.
In other words, the method (2.27) is locally accurate of ![]() (kp+1) if it is obtained from a relation (2.28) by neglecting a term of
(kp+1) if it is obtained from a relation (2.28) by neglecting a term of ![]() (kp+1).
(kp+1).
2.6 How to test the correctness of a program
Consider the initial value problem
and approximate it by the forward Euler method
![]()
At this point we want to introduce the solution expansion (for further details, see Section A.3), one can prove that
Here y(t) is the exact solution of (2.29) and φ1 and φ2 are smooth functions of t that do not depend on k.
Assume that we have written a program that carries out Euler’s method and we want to test if our program is correct. One cannot overemphasize the importance of such tests. Any experienced programmer distrusts programs and tests them over and over and, for complicated programs, finds errors even after having used them many times.
Test 1 Calculate the numerical solution for a given step size k, resulting in v(1) = v(1)(t, k). Now calculate the solution again but this time with the step size k/2, resulting in the solution v(2) = v(2)(t, k/2). By (2.30),
Therefore, the precision quotient,
Here we have assumed that φ1(t) is not zero. Assume that we have calculated the solution y(t) of (2.29) analytically. Then we can evaluate Q(t) for all t = nk, n = 1, 2, … and we can test if Q(t) ~ 2. In practice, this test is rather reliable. However, it can happen that the test fails although the program is correct. This can happen for two reasons:
(a) The k used is too large and k2φ2(t) + ![]() (k3) is of the same size as kφ1(t). If, for example, we can neglect the terms
(k3) is of the same size as kφ1(t). If, for example, we can neglect the terms ![]() (k3) and kφ1 = k2φ2, then (k/2)φ1 = (k2/2)φ2 and, therefore,
(k3) and kφ1 = k2φ2, then (k/2)φ1 = (k2/2)φ2 and, therefore,
(2.34) ![]()
The remedy is to alter the test to accommodate smaller k.
(b) One applies the test at a point t where φ1(t) = 0 or where |φ1(t)| is very small. If φ1(t) = 0 and φ2(t) ≠ 0, we have for small k:
![]()
Therefore, one applies the test at many points t. If, Q(t) ~ 2 at most points and Q(t) > 2 at some points, one can be satisfied that the program has passed the test.
For equations more complicated than (2.29), it is often difficult to solve the initial value problem analytically. Let us explain how one proceeds in such cases. Consider the general problem
The function
![]()
will usually not satisfy (2.35). However, w is a solution of
where
![]()
We apply our program to solve the new equation (2.36) and can perform the test. An expansion of the form (2.30) is still valid if f(y, t) is a smooth function, so let us assume this fact for now. If the program solves (2.36) correctly, there is a good chance that it is still correct when we choose G(t) = 0, that is, when we solve the original equation (2.35).
Test 2 There is another way to test the program which does not require knowledge of an exact solution y(t). Besides the computations with step sizes k and k/2, we perform a third calculation with step size k/4 and determine v(3)(t, k/4). We obtain
Subtracting the expansions (2.32) from (2.31) and, similarly, subtracting (2.37) from (2.32), we obtain

We can now calculate
The new precision quotient ![]() (t) is determined completely by our numerical approximations. If
(t) is determined completely by our numerical approximations. If ![]() (t) ~ 2, our program passes the test and has a good chance to be correct. Again, as in Test 1, one has to be careful to choose k small enough. Also, if |φ1(t)| is very small, the test may fail at t even though the program is correct.
(t) ~ 2, our program passes the test and has a good chance to be correct. Again, as in Test 1, one has to be careful to choose k small enough. Also, if |φ1(t)| is very small, the test may fail at t even though the program is correct.
Exercise 2.3 Consider problem (2.29) and an approximation by any one-step method accurate of order p. Show that both precision quotients Q and ![]() defined in (2.33) and (2.38) should approximate, for small k, the value 2p at most points.
defined in (2.33) and (2.38) should approximate, for small k, the value 2p at most points.
Exercise 2.4 Following Exercise 2.1, modify your program to compute the precision quotient
![]()
where v(1)(t) is the numerical solution computed with step size k and v(2)(t) is the solution computed with step size k/2. Show two plots of Q(t), the first computed using k = 0.01 and the second, using k = 0.001.
2.7 Extrapolation
By combining numerical solutions of a particular method, one can build a higher-order method. This technique is generally known as extrapolation.
Consider the initial value problem (2.35) as before. We can use the three computations, with step sizes k, k/2, and k/4, to improve the accuracy of our approximation. To simplify notation, let us drop the arguments in equations (2.31), (2.32), and (2.37). Then we have
Multiply (2.40) by 2 and then subtract (2.39) to obtain
Similarly, multiply (2.41) by 2 and then subtract from (2.40) to obtain
The last two equations say that 2v(2) − v(1) and 2v(3) − v(2) are both order ![]() (k2) approximations to y = y(t). Furthermore, if we multiply (2.43) by 4 and then subtract (2.42), we obtain
(k2) approximations to y = y(t). Furthermore, if we multiply (2.43) by 4 and then subtract (2.42), we obtain
![]()
This says that the combination
![]()
is an ![]() (k3) approximation to y = y(t).
(k3) approximation to y = y(t).
Exercise 2.5 Define a precision quotient Q(t) for the extrapolated solution built above w(t, k) = (8v(3) − 6v(2) + v(1))/3 and show that Q(t) ≃ 23 + ![]() (k).
(k).
1 Also called the Euler forward method, or simply the Euler method.