17
Intelligent Parking Management in Smart Cities
Sanket Gupte and Mohamed Younis
Department of Computer Science and Electrical Engineering, University of Maryland Baltimore County, Baltimore, MD 21250
17.1 Introduction
It would be fair to say that only a small portion of urban traffic is caused by people driving through a city to get to the other side. Most people wanting to go to the other end of a city do not pass through but go around the city instead, to avoid congestion. Then it is also fair to assume that just about everyone else, even taxis, are going to have to park, maybe for a few minutes or much longer. Depending on the city, they could be spending anywhere between 30 seconds to 20 minutes on average looking for a space to park. We can hence conclude that parking has a major contribution to congestion in modern cities. As the population of a city grows, the density of vehicles on the roads consequently increases, and our society is currently on the verge of facing the great challenge of a global gridlock.
Vehicles are causing massive headaches for city planners and drivers alike, and smart cities are examining how to leverage technology to make communities more livable. The US Department of Transportation, in the first quarter of 2016, put up a challenge and pledged up to $40 million (USD) to one city that would effectively define what it means to be a smart city (US Department of Transportation). The pitch of city of Columbus, OH, which won the challenge, describes “parking” as a great impediment for the development of the city, which affects access to jobs, freight transportability and reliability, the tourism and sports industry, and of course transportation. According to ITS America (ITS‐America, 2016) about 30% of urban traffic is caused by driver searching for parking, and on an average 20 minutes are spent looking for parking, which effectively translates to 55 hours every year each driver spends looking for parking. Imagine the amount of pollution and greenhouse gases emissions that could potentially be avoided.
Although cities are expanding, urban areas are so densely populated, it would not be wrong to assume that the supply of parking spaces is somewhat fixed. Therefore, one cannot address the supply. The only recourse is to change the demand to try and reach equilibrium. Thus, parking management in smart cities is not just about how to manage incoming and outgoing vehicles in a parking lot, but is a lot more than that. It is about how to optimize the use of available parking facilities, how to make the commuters aware of the available parking locations, keep track of parking offences, speeding up the process of finding a spot, and directly and indirectly optimizing the time utilization for everyone in general.
While managing parking using RFID, WSN (Chinrungrueng, Sunantachaikul, and Triamlumlerd, 2007; Kim et al., 2010; Bachani, Qureshi, and Shaikh, 2016) and vision‐based techniques (Chen et al., 2010) have been prevalent for several years, although not widespread, all the new frameworks and proposals nowadays use a combination of two or more sensing technologies (Rico et al., 2013; Stenneth et al., 2012) to achieve more precise tracking and better utilization of existing assets. Many private companies (Cisco‐Systems‐Inc., 2016; Siemens‐AG, 2016; Streetline‐Inc, 2016) are researching and developing their own hardware and software to efficiently manage parking. Siemens Mobility has designed a smart parking solution (Siemens‐AG, 2016) in which they use a radar‐based WSN architecture to detect parking spot occupancy and a web‐based parking management system to analyze and distribute real‐time status updates. Similarly, the system of Streetline (Streetline‐Inc, 2016), a startup company developing smart applications and infrastructure for parking management, has successfully deployed their solution in at least three cities. They basically use in‐pavement sensors and cameras to collect data and have a web‐based analytics platform that in turn provides real‐time parking information to users' smart phone–based applications. Meanwhile companies such as Inrix (INRIX, 2016) are developing integrated inter and intra vehicular solutions to detect whether and where a vehicle is parked and aggregating the data to a parking map. Others such as Civic‐Smart (previously Duncan; Civicsmart‐Inc, 2016) are using their experience over the past few decades in the parking hardware industry to modernize the existing infrastructure.
While all these systems, some proposed, some simulated, and the rest sparsely implemented, are effective ways to achieve the goal of successfully optimizing the use of parking spots and making drivers aware of the availability, there is one common pattern in each of them. All of them almost completely depend on installation of additional hardware for the detection and notification of parking availability. As shown in the glimpse above, in this chapter we provide extensive analysis, survey existing systems, and highlight cutting‐edge solutions for parking management in smart cities. One such solution is our smart phone–based participatory sensing application architecture (Gupte and Younis, 2015), which is to run on the cloud in order create an efficient parking experience for citizens of smart cities, without the need for any additional hardware and infrastructure costs, making it easy to implement and quick to integrate in all the existing parking systems. We describe in depth how we can achieve real‐time parking availability information and effectively regulate supply and varying demand for parking spaces. We display the most efficient ways to inform users about the parking availability and find the optimum spot based on their final destination and requirement.
With a reward‐based participatory sensing architecture it is possible to incentivize the application and boost user participation with the possibility of being able to gain different kinds of rewards such as a dedicated parking spot, priority parking, etc. It is also feasible to integrate payment regulation, ticket generation, and payment processing, etc., into the smart‐phone application itself. Our solution could manage street parking, which is a very complex problem given the difficulty in tracking the state of the spots. Our system can also be used to help manage the parking facilities by accessing and validating the need for having more or fewer parking spaces, etc. Higher occupancy rates and good parking turnover would mean increased revenues not just from parking fees but also from fines due to improved infringement detection. Also, such fine‐tuned parking management means fewer cars on the road, and consequently less fuel consumption, and in turn lesser emissions, which is precisely one of the main visions of a true smart city.
This chapter is organized as follows. The next section summarizes the design objectives and issues for a parking management system and provides a taxonomy and general categorization. Section 17.3 surveys and classifies existing parking management solutions for smart cities. Section 17.4 describes a novel participatory sensing–based solution and discusses its applicability and performance. Finally, Section 17.5 concludes the chapter with a summary and highlights future research directions.
17.2 Design Issues and Taxonomy of Parking Solutions
17.2.1 Design Issues for Autonomous Parking Systems
A parking management system must address two fundamental issues: (1) how to track the status of parking resources, and (2) how to optimally assign a vehicle to a vacant spot. The first issue involves two key design challenges, namely, how to check the status of a parking spot, how such a status is tracked over time, and where the status of the spots is maintained. Basically, the system needs to know whether a spot is occupied or available. Doing so requires either the deployment of a sensing methodology, either hardware based or just human based. In addition, the sensing data should be either collected periodically or queried on demand. The dissemination of such data requires some communication infrastructure that may involve either wireline or wireless links, or even a mix of both. The data could be disseminated to a central unit or stay scattered in multiple units. The latter raises issues of consistency and concurrency control, which is popular in the realm of distributed databases.
Optimized assignment of spots to requesting vehicles is the core objective of the parking system. From an operator point of view, the utilization of the spots should be maximized for increased revenues and/or return on investment. For a user, finding the closest spot is desirable. The system should strive to achieve the objectives of both user and operator. When the status of the spots is closely tracked and the parking requests are deterministic, the optimization could be manageable; yet it becomes quite complicated when factoring in uncertainty about the user demands and highly error‐prone state of parking spots. For example, one cannot guarantee that the requester will indeed park in the allotted spot, and the next state of the parking cannot be inferred with high fidelity. Another objective could be experienced in street parking, where the duration of occupying a parking spot is constrained in order to ensure fairness. In this case the request for parking will include a desired duration and the system will try to make the best match subject to specific regulations.
17.2.2 Taxonomy of Parking Solutions
Parking solutions have evolved by leaps over the past two decades. There are several different ways and perspectives for how these solutions are to be deployed in cities all over the world. Generally, existing solutions employ a diverse set of technologies and deployment strategies. Many variables and factors shape up the whole system and all have major roles in its success or failure. We categorize these parking systems based on five major subsystems, as explained below and illustrated in Figure 17.1.

Figure 17.1 Taxonomy and general categorization of parking systems.
- Sensing Infrastructure: Sensing nodes are embedded systems that collect and process data into useful information and forward it to other parts of the infrastructure. They always evaluate their own accuracy, status, and health to inform the system accordingly. This poses the need for various levels of authenticity and validation checks.
- Communication Infrastructure: The sensed information must be collected to be further forwarded to different parts of the system, e.g., roadside infrastructure, storage servers, parking meters, etc. Therefore, the spot sensors must be part of a network. Increasing the number of sensor devices imposes the additional burden of transmission scheduling and spectrum allocation.
- Storage Infrastructure: The data received from the communication infrastructure must be stored, processed, and analyzed for dissemination as well as learning. Where the data is stored, how it is stored, and its accessibility are important aspects in its retrieval.
- Application Infrastructure: The application infrastructure opts to fulfill the different requirements of the parking system and displays the spots status at the right interface, e.g., in a smart phone or signs outside parking lot, payment kiosk, etc.
- User Interfacing: Parking systems use the sensed information to offer parking information to drivers. The system must efficiently cater to the interests and needs of the drivers, deliver the most relevant information, and adapt to varying service requirements.
Considering all the above factors, it would be beneficial to identify and classify existing parking solutions based on how they handle these factors. In the next section, we survey existing solutions while highlighting their advantages and shortcomings.
17.3 Classification of Existing Parking Systems
The designs of parking systems found in the literature are quite diverse and cover several aspects that range from optimizing spot allocation and parking structures to interfacing between drivers and urban resources. In this section, we survey and classify existing parking solutions based on the taxonomy provided in the previous section. We first start with how to obtain parking occupancy information from different sensors in Subsection 17.3.1 by discussing the popular sensing technologies that are employed. In Subsection 17.3.2 we cover the different ways the sensor data is transferred to information sinks or data‐stores. Subsection 17.3.3 reviews the various application architectures and highlights their advantages and shortcomings. Meanwhile, Subsection 17.3.4 describes how data processing and analysis are applied in existing systems to extract useful information from the sensed data. Finally, Subsection 17.3.5 focuses on how information is displayed to the drivers to help them make an educated decision on where to park their vehicles. Finally, Subsection 17.3.6 provides a comparative summary of all existing systems.
17.3.1 Sensing Infrastructure
Assessing spot occupancy can primarily be done using hardware sensor or participatory sensing. Hardware‐based sensing relies on a different modality to collect parking spot status and can be classified into stationary or mobile. Stationary sensors are usually installed in every spot to instinctively detect the presence of a vehicle and report the status. Whereas, the mobile‐sensing methodology employs vehicle‐mounted devices and relies on the vehicle motion in data collection. Basically, when a vehicle passes through a particular place, it reports information along the route. In essence the mobile sensing methodology minimizes the number of sensors by exploiting spatiotemporal coverage. Different sensors have distinct mechanisms to detect the presence of vehicles. Popular sensing modalities include infrared, ultrasonic, optical, magnetometer, imager, video, and RFID. In the balance of this subsection we enumerate the different types of sensors and describe them in detail.
Infrared sensors can be active or passive. The idea is to install such a sensor in the parking spot to detect whether a vehicle is present. Active ones use infrared signals to measure the distance to an obstacle in their field of view; thus, if a vehicle is present, the distance is small. Active infrared sensors have the advantage of being able to detect occupancy of multiple vehicles using a single sensor. Meanwhile passive infrared sensors detect a vehicle based on the radiated heat. Examples of active and passive infrared sensors are shown in Figure 17.2. Nonetheless, like all spot‐installed vehicle detection sensors, the installation and maintenance cost of infrared devices dominates. In addition, infrared sensors consume a lot of energy and are very sensitive to light and hence are not very accurate, especially in outdoor environments. Examples of systems that use infrared sensors are provided in the literature (Cao and Kong, 2011; Huang, Huang, and Sun, 2011; Mainetti et al., 2015; Pala and Inanc, 2007).

Figure 17.2 Illustrating the use of active and passive infrared sensors.
Ultrasonic sensors (Bi et al., 2006; Chen and Chang, 2011), on the other hand, detect spot occupancy by sending an ultrasonic signal and using its received echo to detect the presence of an obstacle (vehicle, in case of a parking spot), as illustrated in Figure 17.3. Together with a signal processing module, the reflected ultrasonic energy is analyzed using a roadside controller to calculate the distance between the obstacle and the sensor and infer whether a vehicle is parked. Ultrasonic sensors provide a complex signal pattern that enables multiple lane coverage and detection of vehicles that exceed certain height. Therefore, these sensors can be used for detecting occupancy in multiple spots and are consequently advantageous in outdoor environments. However, a serious shortcoming of this type of sensors is the degraded occupancy measurement on freeways with vehicles traveling at moderate to high speeds due to the large pulse repetition period. In addition, temperature changes and extreme air turbulence affect the sensor performance, although temperature compensation has been built into some of the available models in the market.

Figure 17.3 Occupancy detection by installing ultrasonic sensor above each spot to detect the presence of a vehicle.
Optical sensors detect changes in light intensity; thus they have to be installed in a spot in such a way that the incoming light will be obscured by the parked vehicle. The sensor first calculates the intensity of light of a luminous source such as the sun; the absence of this luminous intensity creates a shadow, indicating the unavailability of a spot. Hence, optical sensors are impacted by any light source and transient objects, and consequently their accuracy assessment may be questionable. Bachani, Qureshi, and Shaikh (2016) present a performance analysis of the detection accuracy of vacant parking slots under different light signals, mimicked by concentrating on light dependable resistor sensors and infrared (IR) sensors, during different times of the day and under varying weather conditions. They have concluded that IR sensors are certainly better than optical (light detecting resistor) ones since the accuracy of IR sensors is relatively unaffected by weather conditions and other sources of light. On the other hand, the accuracy of optical sensors is highly degraded by the variations in luminous intensity throughout the day and hence need different threshold values for detection during different times. Moreover, shadows also increase false detection rates for optical sensors.
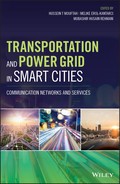
Inductive loop detectors are different‐sized wire loops that get excited with signals with frequencies between 10 and 50 KHz. The oscillation frequency of the inductive loop is directly controlled by the inductance of the loop, which changes with vehicle presence. This sensor technology is fairly established, mature, and well researched; compared to other commonly used techniques, it provides the best accuracy and hence is quite widely used to detect slot occupancy. The biggest disadvantages of inductive loops are its expensive installation and maintenance costs. As illustrated in Figure 17.4, the loops are placed through the pavement. In addition, multiple detectors are usually needed to monitor a location, and lots of wires are placed. The involved wires are easily susceptible to stress and temperature‐based wear and tear and are also sensitive to water that seeps through cracks on the pavement surface.
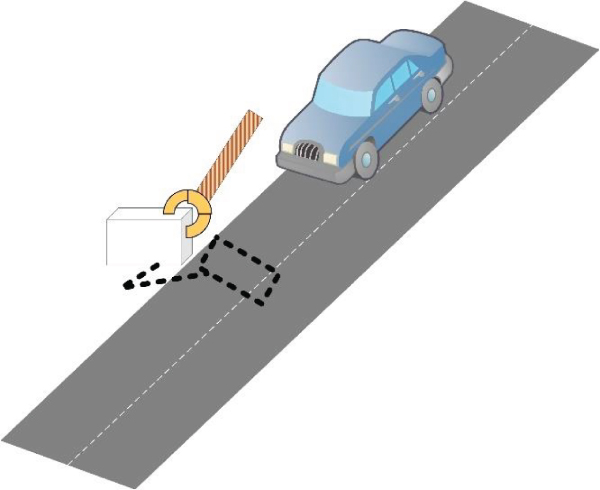
Figure 17.4 Inductive loop detector installed at the entrance of a parking lot.
Piezoelectric sensors are made from specially processed material that is able to convert kinetic energy to electrical energy when subjected to vibration or mechanical impact. The sensors not only can detect the passing of a vehicle but can also detect other physical attributes of the vehicle, making it easy to identify the category or type of vehicle. In addition, it provides accurate readings on vehicle speed and classification of vehicles based on weight and axle spacing with almost the same cost as inductive loop detectors. Among the disadvantages of piezoelectric sensors is the need to use multiple detectors to instrument a location. In addition, piezoelectric sensors can also easily wear out due to high temperature and traffic stress.
Pneumatic road tube detects vehicle via the air pressure created when the vehicle passes or stops over the tube. Such air pressure closes a switch, producing signals. While a pneumatic road tube offers a low‐cost solution as well as quick installation and easy maintenance, it has its disadvantages. Basically, pneumatic road sensors are temperature sensitive. Inaccuracies in axle count are also bound to happen when bus and truck numbers are high. In addition, the tubes are prone to vandalism. Furthermore, instrumenting a large parking lot with pneumatic road tubes will make it visually unappealing.
The search coil magnetometer, or induction sensor (Benson et al., 2006) measures the change in magnetic flux lines caused by heavy metal objects using the law of induction, whereas fluxgate magnetometers detect anomalies in the earth's vertical and horizontal magnetic field. Thus, by installing such a sensor in the parking spot (as illustrated in Figure 17.5), it is easy to detect if a vehicle is present. Magnetometers have an easy to read signal pattern and are insensitive to weather conditions and less susceptible to weight stresses than piezoelectric sensors or pneumatic road tubes; however, magnetometers cannot detect multiple objects. Magnetometers can be put on controller printed circuit boards and used only as sensing devices. In fact, they have become an integral part of smart phones and are primarily used to give the sense of direction, as to which direction the phone is facing relative to the geographic poles of earth. The magnetometer on board a smart phone can certainly enable the participator sensing model. Using support vector classification (Villanueva et al., 2015) the data collected from the cell phone magnetometer can be used to determine whether a vehicle is parked to the left/right or on both relative to the phone. Being embedded into a smart phone, it is easy to forward the sensor data to a server. Using this data and GPS location of the phone, the server could produce a map of free parking spaces. Villanueva et al. (2015) also could successfully find strong variation in magnetometer readings when the moving test car passes by a vacant parking space. Alternatively, Boda, Nasipuri, and Howitt, (2007) compare different readings between adjacent magnetometer sensors installed on the pathway, to know how many vehicles are parked between them.
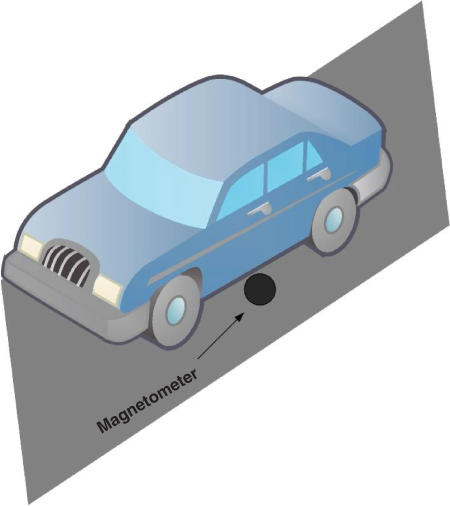
Figure 17.5 A magnetometer installed under a parking spot detects whether a large metal object, i.e., a vehicle, is present.
Magneto‐resistive sensors measure the X, Y, and Z‐axis components of the Earth's magnetic field. As vehicles come within range of the sensor, changes in the surrounding magnetic field occur and are detected. Each sensor continually monitors the background magnetic field to establish a base reference, allowing self‐calibration. Magneto‐resistive sensors are lightweight and small making them versatile in placement. An in‐depth analysis of magneto‐resistive sensors has shown that they can be used efficiently in parking spot occupancy detection (Daubaras and Zilys, 2012). It has also been concluded that their efficiency drastically degrades due to the presence of large metal objects in the vicinity and when vehicles are in motion. Although their circuit complexity is comparable to the classical fluxgate magnetometers and they are both vectorial sensors (Marathay and McCalmont, 2001), magneto‐resistors are much smaller in size and also consume less power.
Microwave / millimeter wave radar detectors operate by emitting a directed signal and then measuring energy reflected from target vehicles within the field of view. The technology is fairly mature due to its past use in military applications, and its cost is not high. The internal circuit of such a radar detector is quite small in size, and the high operation frequency enables the use of small antennas. In addition, to measuring motion velocity, a single sensor can detect multiple lanes with proper placement and signal processing. On the other hand, disadvantages include unwanted vehicle detection based on reception of side‐lobe radiation and false detection due to multipath. Nonetheless, these disadvantages can be overcome with proper placement, signal processing algorithms, and efficient antenna design. The most important shortcoming, however, is the limited coverage range since shorter wavelength means shorter transmission range for a given power. Sensors for parking systems need to operate at low power and consequently their transmission ranges could even be less than 10 meters. Moreover, the atmosphere absorbs millimeter waves, restricting the range, and rain, fog, and any other moisture in the air also makes signal attenuation very high.
Weight‐in‐motion (WIM) sensors detect the vehicle weight. The four technologies used in WIM systems are: bending plate, piezoelectric, load cell, and capacitance mat. Each of these WIM sensor types has its own advantages and disadvantages. While bending plate WIM is more accurate and costly compared to piezoelectric WIM system, it is less accurate and considerably cheaper than load cell WIM systems. Although the capacitance mat has the advantage of being portable or fixed, it is the least accurate WIM system. For accuracy, the load cell would be preferable as it is the most accurate WIM system yet with the disadvantage of being the priciest. The cheapest WIM system in use is the piezoelectric system, with a weakness of sensitivity toward weather and speed variation. Its accuracy is behind load cell WIM and the bending plate WIM system. Both the piezoelectric and capacitance mat WIM system can be used to monitor up to four lanes. All the WIM systems require replacement or refurbishment every 3 to 5 years.
Cameras provide a much more complicated signal pattern than other sensors and they require image‐processing techniques to extract the required information and determine occupancy. When a vehicle is parked at a spot, it is possible to perform edge‐detection on the picture/video of the spot and successfully detect the presence of a vehicle (Al‐Absi et al., 2010; Banerjee, Choudekar, and Muju, 2011; Lixia and Dalin, 2012). Edge density, light intensity, and color variations are the important variables that are used (Chen et al., 2010) along with vehicle classifiers and regions of interest (Al‐Absi et al., 2010) to efficiently detect spot occupancy. Due to the complexity of the signal pattern received from cameras, several different models (Deng, Jiang, and Wei, 2006) and algorithms (Lixia and Dalin, 2012) have been developed for parking spot occupancy detection. However, camera‐based systems have several problems that decrease their efficiency. Basically, they have to cater to color, light, and occlusion changes of parking grounds (Chen et al., 2010) and have to resort to additional validation mechanisms, such as aerial monitoring using micro aerial vehicles (Huang et al., 2015) or to other additional hardware‐based sensors in order to increase accuracy. Moreover, the data storage, processing, and communication costs of this type of occupancy detection sensors are considerably higher than those of other techniques. Despite being comparatively less efficient than alternatives, cameras can certainly provide additional functions such as license plate recognition and can thus enable vehicle identification and automated billing/charging of parking services (Du and Sun, 2012).
While discussing cameras, it is important to highlight emerging parking management solutions that leverage new driver‐aiding technology found on some of the new vehicles. Basically, car manufacturers Infiniti and Nissan pioneered the “Around View Monitor” (AVM), which is a support technology that assists drivers to park more easily by better understanding the vehicle's surroundings through a virtual bird's eye view from above the vehicle. AVM helps the driver visually confirm the vehicle's position relative to the line marks of parking spaces and adjacent objects, allowing the driver to maneuver into parking spots with more ease. The AVM processes video from four cameras, displaying the composite footage on the screen as if there were a single bird's eye view camera right above the vehicle. Video signals from four cameras feed into an image‐processing unit: the side views show both left and right, the rear view showing the back of the vehicle, and a front view camera. These signals are then converted into a composite virtual bird's eye top view using image processing, as if seen from directly above the vehicle. A version of this technology is also developed by Toyota called Bird's eye View Monitor and by other big car manufacturers as well. Figure 17.6 illustrates the capabilities of AVM.
Figure 17.6 Illustrating the “around view monitor” support technology.
A novel parking slot detection and tracking system is proposed in Suhr and Jung, (2014), where the sensor readings of an AVM system are fused with an ultrasonic sensor–based automatic parking system to detect vacant slots. The system continuously detects parking slot markings and classifies their occupancies. Simultaneously, it presents the detection and classification results from the AVM images to help the driver identify available slots. Once a desired parking slot is selected, the system tracks the position of the selected slot, while the vehicle is moving into it. The parking maneuver is finished when the vehicle is located at the target position.
RFID is popularly being used in vehicle identification and payment at electronic toll collection points, and is hence a very viable option in parking lots as well. Vehicles installed with passive RFID tags can be identified at the entrance of parking lots that have RFID readers installed (Du and Sun, 2012; Pala and Inanc, 2007). An active RFID tag is primarily dependent on the lifetime of the battery and hence needs ultralow‐power components and a design mechanism that allows to completely turn it off or put it into standby mode. Such active RFID hardware can be very helpful in multiple vehicle identification (Huang, Huang, and Sun, 2011); with strategically placed receivers and an RIFD system with location detection features, it is possible to have a system with accurate occupancy detection (Rahman, Park, and Kim, 2009), as illustrated in Figure 17.7.

Figure 17.7 The RFID setup for parked vehicle detection, as proposed by Rahman et al. (2009).
Fiber‐bragg Sensors (FBG) have been explored in Prasad et al. (2012) as a means for detecting parking spot vacancy. These FBG sensors, which are embedded underground, determine the strain changes due to the load applied by the vehicle in the parking space. Several advantages can be noted about this technology such as electromagnetic interference immunity, remote sensing, long‐term stability, miniature size, etc. Nonetheless, their deployment is expensive since they have to be installed under the pavement.
Ultra‐wideband (UWB) technology is uncommon in general and absolutely rare to be used in parking occupancy detection; nonetheless, it has been studied in Zhong, Guo, and Zeng (2010) as an unconventional way to locate and navigate vehicles in a parking lot. This technology has several advantages such as precise location accuracy and high data rate, yet the initial cost of implementation is very high and the overall performance of UWB in all its applications has had a sharp decline as compared to when it was initially introduced, causing it to be near extinction in terms of usability.
It is important to note that some work employs multiple sensing modalities to effectively reduce the impact of interferences from different sources and increase accuracy. For example, Barone et al. (2014) attach RFID tags to vehicles to help in identifying the vehicles, and use an inductive magnetic loop to help detect occupancy. An illustration is provided in Figure 17.8. The RFID tags in their system can be transferred between vehicles and also help in identifying the vehicle when reserving a spot. Stenneth et al. (2012) detect the time and location of the parked vehicle by using GPS, accelerometer, and Bluetooth in conjunction with geospatial data. Basically, a change in transportation mode implies that the driver has left the vehicle, and the last reported location and time reflect where and when the vehicle is parked. To elaborate, when a person switches from a driving mode to walking mode, it becomes evident that the person parked their vehicle, and based on the GPS location and geospatial data, the parked spot status is inferred.
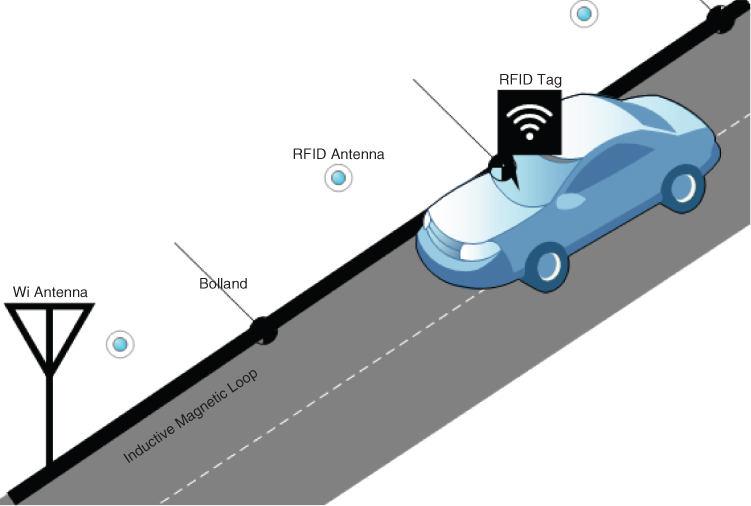
Figure 17.8 Multi‐modal sensing architecture for parked vehicle detection. Picture courtesy of Barone et al. (2014).
Huang et al. (2015) present a hybrid system where all parking spots are populated with QR codes and near‐field communication (NFC) tags. QR codes are machine readable codes consisting of an array of black and white squares that have become as popular as bar codes in recent years. An onboard camera of a micro aerial vehicle (MAV) or drone is used to detect occupancy by reading the individual QR Codes or NFC tags on each spot. In the proposed system the MAV would patrol the parking lot along predefined gridlines and read the QR code at each spot and detect occupancy using the on‐board camera. Since a QR code is difficult to read in low light conditions, NFC tags are installed as backup. It is not clear though why QR codes are needed if the NFC tags suffice. The authors additionally propose using low‐cost web‐cameras connected to Raspberry Pi controller boards on each spot for vehicle license plate recognition and spot monitoring, which seems a little overkill in terms of installation and maintenance costs for large parking lots.
Table 17.1 provides a comparative summary of the various sensors covered in this subsection.
Table 17.1 Comparative Summary of Different Sensors for Parking Management.
| Sensor | Camera | Ultrasonic | RFID | Passive infrared | Passive acoustic array | Microwave radar | Weigh‐in‐motion | Piezoelectric cables | Pneumatic road tubes | Magneto‐resistive | Magnetometer | Inductive loop | Active infrared |
| Coverage | Multiple detection | Multiple Detection | – | Multiple detection | Multiple detection | Multiple detection | Multiple detection | Need multiple sensors to detect single presence | Single | Single | Need Multiple sensors to detect single | Single | Multiple spots |
| Most Accurate detection when | Stationary | Both | Stationary | Mobile | Mobile | Mobile | Mobile | Mobile | Mobile | Stationary | Stationary | Stationary | Stationary |
| Placement | Non‐intrusive | Non‐intrusive | Non‐intrusive | Non‐intrusive | Non‐intrusive | Non‐intrusive | Intrusive | Intrusive | Intrusive | Intrusive | Intrusive | Intrusive | Intrusive |
| Biggest Disadvantage | Highly sensitive to light and environment changes | Degraded occupancy measurement with vehicles traveling at moderate to high speeds due to large pulse repetition period. Temp change & extreme air turbulence affect performance | Vehicles have to equipped | Sensitive to environmental conditions | Sensitive to cold temperatures, cannot accurately detect slow moving traffic | Expensive. inefficient vehicle detection | Need multiple sensors to detect single. Extremely sensitive to high temp and traffic stress | Extremely sensitive to temperature. Prone to inaccuracies during increased traffic | Small detection zones. Need multiple sensors for single detection | Expensive and frequent maintenance. Susceptible to wear and tear due to temperature and traffic stress. | Sensitivity to environmental conditions. Need periodic lens cleaning. | ||
| Required Communication Bandwidth | Modrate to high | Low | Moderate | Low to moderate | Low to moderate | Moderate | Low to moderate | Moderate | Low to moderate | Low | Low to moderate | Low to moderate | |
| Acquisition/deployment cost | High | Low | Medium to high | Moderate | Moderate | Moderate | Low | Medium to high | |||||
| From Factor Small size | Yes | Yes | Yes | Yes | Yes | Yes | No | No | No | Yes | No | Yes | |
| Accuracy of detection | ++ | +++ | +++ | ++ | + | +++ | +++ | +++ | +++ | +++ | +++ | ++ |
a Estimated Costs per sensing unit for a single spot. Not including installation or maintenance. Low: up to $1,000. Moderate: $1,000 to $8,000. High: $8,000 to $30,000.
b According to data collected in (US‐DOT, 2007) 2007 Study, US Dept. of Transportation.
c +: less accurate, ++ : moderately accurate, +++ : highly accurate.
The range of communication bandwidth and cost shown for particular sensor technology reflects bandwidth usage and cost differences among specific sensor models and capabilities.
We discussed different types of sensors and sensing technologies that are currently available. Each one on its own may not be the most accurate in detecting the occupancy status at a parking spot, but using a combination of them can effectively reduce the shortcomings of each other. While installation and setup of multiple sensor devices can be fairly less complex, the cost of the entire hardware infrastructure in the system grows significantly. Moreover, the logistical complexity involving selective replacement of those sensors that run out of energy or fail is a major disadvantage. Being constrained in energy supply makes these sensors incapable of performing computation‐heavy processing, and hence they become heavily dependent on the communication infrastructure to pass along the raw data to the sink nodes or servers. Intrusive sensors as the ones classified in Table 17.1 require cutting the pavement for installation and maintenance, indirectly decreasing pavement life, not to mention inconvenience and traffic obstruction.
On the flip side of having hardware sensors is using participatory sensing (Burke et al., 2006) which is a another interesting methodology for tracking the status of parking spots. Basically, smart phones these days have become such an integral part of the daily routine that it is almost impossible to imagine a day without the need of these devices. They come equipped with so many different types of sensors that if used efficiently, they can open up a world of possibilities. It is safe to assume that, even today, every person who owns a vehicle and would want to use a parking facility definitely owns a smart portable device. Thus, a parking system that uses only smart phones can successfully eliminate the need for any additional hardware for managing parking. Participatory sensing, more broadly knows as crowdsourcing, is a new sensing paradigm where a community of participants is vested in the outcome of a particular research and discovery task. Basically, participants use their smart devices to help in parking management. Although getting rid of the hardware infrastructure completely at the data collection end is certainly an advantage, starting to design a participatory sensing campaign brings out its inherent advantages and disadvantages fairly quickly. One of the biggest advantages of participatory sensing is that it is an almost negligible cost for getting the data than deploying a whole hardware sensing infrastructure. On the other hand, getting data from human participation leads to a lot of credibility questions and concerns. Recruiting participants is a major concern for such a system and consequently the design has to be such that the potential advantages of using the system are more appealing than the efforts and time spent in interpreting and providing the occupancy information to the system. It is intuitive that it is essential to have some form of user feedback, incentives, and engagement promotion mechanism. Also, without proper means of authentication and validation, there is a good chance of several security vulnerabilities. A detailed discussion of participatory sensing–based parking management will be provided in Section 17.4.
17.3.2 Communication Infrastructure
The vehicle detection infrastructure needs to be internetworked in order to communicate the sensed data between different sensors as well as servers and user interfaces. The communication support can be categorized into: (a) short range, such as low‐power Wi‐Fi, Bluetooth, infrared, NFC, ultraband, Zigbee, or 802.11ah, where signals can travel from several centimeters to 100 meters or so, and (b) long range, such as LTE, NB‐Fi, Sigfox, or LoRa, where the signals can travel from a few kilometers to a few thousand kilometers.
Many of the commercially available sensor nodes nowadays such as magnetometers, RFID, infrared, and WSN motes are wireless and hence have to be energy efficient. The data volume and transmission power are important factors to consider while lowering energy costs from the communication point of view. WSN motes have their own network layer for communication among themselves (Bi et al., 2006; Chen and Chang, 2011; Zheng, et al., 2006). Their software support is also energy efficient and provides an event‐based mechanism to collect or transmit data. The system architecture may employ multi‐hop communication to disseminate data to a base station, have gateway nodes that act as intermediaries (Mainetti et al., 2015; Pham et al., 2015), or simply rely on direct links between sensors to a base station (Benson et al., 2006). As illustrated in Figure 17.9, the gateway nodes are usually shared between multiple co‐located sensor nodes, whereas a base station is a single unit collecting data from all sensor nodes; in both cases they pass along sensed data to the storage and application infrastructure.
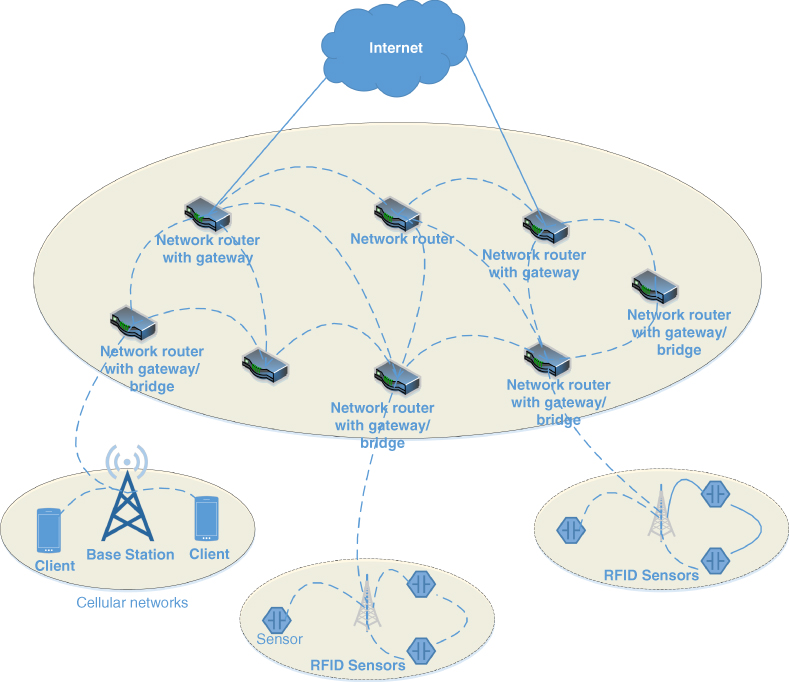
Figure 17.9 An articulation of communication infrastructure with gateways nodes from car‐park‐network architecture proposed in Pham et al. (2015).
Overall, internetworking sensor nodes over wireless links is subject to the conventional challenges in terms of signal interference, multipath, etc. Basically, sensor nodes often use short range RF‐based communication, which is easily affected by the surroundings such as walls and other obstructions causing shadowing, reflection, scattering, fading, refraction, diffraction, distance‐based signal attenuation, etc. Using long‐range communication to transfer sensing information from the nodes is a viable option only if the sensing nodes are not limited on their power consumption, since data transmission over long distances consumes a significant amount of power. Hence, the option of transmitting sensing data in a sensing infrastructure over long ranges was rarely exercised. Nonetheless, this is certainly necessary and viable in participatory sensing since data is collected using mobile phones that are equipped with long‐range transmission capabilities and are also rechargeable. For this reason, a dynamic infrastructure‐less mechanism such as participatory sensing to determine spot occupancy is a very appealing option that gives the necessary results with negligible installation costs.
A slightly unconventional way of handling the communication aspect of the system is based on group communication in peer‐to‐peer (P2P) networking arrangement. Such a networking architecture suits large number of sensors that are distributed across a wide area either in a huge parking lot or in multiple parking facilities, e.g., the long‐term parking lots in a major airport. For example, Cervantes et al. (2007) propose a design that combines P2P and conventional IP‐based networks. The communication architecture consists of overlay group of peer nodes serving as event monitors and service connectors that act as a bridge between the P2P and conventional networks. The RFID‐based parking sensors use P2P group communication, and the data is further disseminated to a data center and then to users through conventional IP‐based networks. Figure 17.10 describes the system. The simulation results show an improved network performance in terms of reduced number of hops and round‐trip delay. While this is a simplistic attempt at designing a hybrid networking architecture, it shows a good initiative that combines the strengths of both P2P networks and conventional IP network in the context of parking management, while also lowering the infrastructure cost significantly.
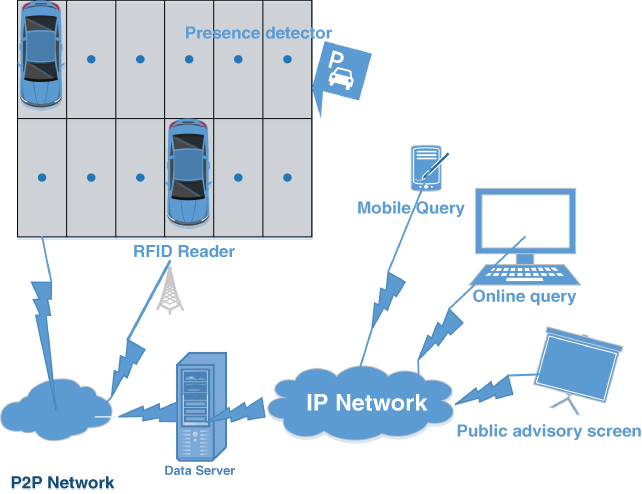
Figure 17.10 Implementation scenario of a hybrid network architecture for the parking systems of Cervantes et al. (2007).
Another possible internetworking architecture is based on vehicular networking (VANET; Yousefi, Mousavi, and Fathy, 2006). Basically, vehicles are equipped with communication and processing modules, which make them a viable means for collecting, processing, and transmitting data. Most VANET systems need an on‐board unit (OBU) on each vehicle to connect it with others. VANETs have been leveraged in some parking management solutions for large parking lots (Yan et al., 2011; Lu et al., 2009). In a VANET‐based parking system, it is important to exchange information in such a way that each vehicle only receives relevant information. Delot et al. (2013) have developed a protocol that efficiently disseminates relevant parking information among the vehicles. They have introduced the concept of events in the context of parking management where nodes report on these events with other VANET members that might deem these events useful. For example, a vehicle leaving a parking spot could announce that a spot is becoming vacant to some vehicles driving around in the vicinity in order to aid drivers who are looking for a spot to park. By using a reservation protocol with such selective information sharing, it has been demonstrated that spots can be efficiently allocated with minimum communication bandwidth utilization.
17.3.3. Storage Infrastructure
A storage infrastructure has several important roles. It acts as the intermediary between the sensing and the application infrastructure, allowing the application infrastructure to get a consolidated view of the sensed data. We classify storage infrastructure for parking systems into three major categories: local, centralized, and distributed. In a local infrastructure, parking occupancy data and the application framework can be stored locally, close to a parking lot and isolated from other lots. This is the most inefficient system, since the occupancy information can only be obtained if one drives to the particular lot, and an interface would display the occupancy at the entrance. Figure 17.11 shows an example of such a local system.

Figure 17.11 A local system may be just a road sign showing occupancy for a specific parking lot.
In a centralized system multiple parking lots submit their occupancy data to a single server, and the occupancy data can be consolidated and viewed as a whole using an interface such as a smart parking app or road signs. On the other hand, local parking systems behaving as a disjoint entity that only displays occupancy at the entrances are eventually going to be obsolete since they are not as useful as those with centralized servers. It is more appealing, useful, and time saving to determine and possibly reserve a slot in advance by looking at the occupancy for all parking lots in an area than to hop around from one location to the other looking for vacancy. A centralized environment, especially cloud‐based services is highly scalable and fairly cost effective in this regard; it also can support reservation quite easily.
Ideally a driver intending to park in a certain locality does not need to know the occupancy at parking lots located further away, implying all occupancy data need not be stored and accessed centrally. Nonetheless, parking systems with distributed storage architecture are not very common. Ganchev, O'Droma, and Meere, (2008) propose a distributed system, which, although it employs a centralized server, also has the data distributed and cached at different locations for fast and easy access. Yamashita and Takami (2014) on the other hand propose a completely distributed and autonomous system based on VANETs by forming clusters of vehicles that store and pass along occupancy information for a parking lot. All vehicles in a parking lot are members of a VANET cluster that has an autonomously assigned cluster head, which is usually the closest vehicle to the entrance of the lot. When a vehicle comes in the vicinity, it would communicate with the cluster heads of all the neighboring parking lots, and then determine where to park. The role of a cluster head is transferred to another when the vehicle leaves the lot. Figure 17.12 illustrates the system of architecture proposed in Yamashita and Takami (2014).
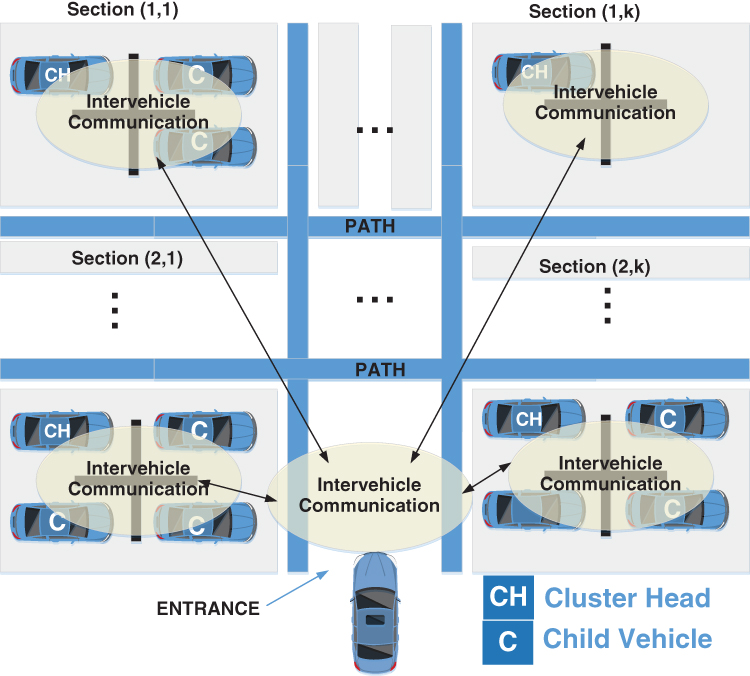
Figure 17.12 An example distributed‐VANET architecture as suggested by Yamashita et al. (2014).
17.3.4 Application Infrastructure
A comprehensive and efficient application infrastructure is essential to deal with all the parking resources and driver requests. In most parking solutions, a framework or architecture for bringing different technologies together is usually presented, and different applications or modules are proposed for spot reservation, payment, guidance, etc. Projects for large cities are often pioneered by big companies and often propose a system balancing the trade‐offs between business advantages, efficiency, and reliability.
It is important to analyze the characteristics of the spatiotemporal information of parking spaces to improve the efficiency of the system. The first role of the application infrastructure is to infer a spot vacancy prediction model from collected data so as to provide drivers understandable and simple information. Although calculating spot occupancy and passing it on to the user interface is fairly straightforward (Bi et al., 2006; Chen and Chang, 2011), the difficult and more important problem to target is what occupancy information to disseminate to which driver such that the traffic flow is reduced and drivers do not have to go around to find parking or compete for the same spots. This also involves optimizing the spot location closest to a driver's final destination. Moreover, parking competition as well as flow rate must also be addressed to understand how moving traffic and driver decisions can affect the performance of the system.
The parking application can also predict vehicle's arrival and departure using stochastic processes, e.g., a Markov model (Antoniou, Koutsopoulos, and Yannis, 2007), by estimating traffic on roads and tracking any associated flights (Roy, Levy, and Tomlin, 2006), i.e., when someone is to park and fly. In Klappenecker, Lee, and Welch, (2014), a system is proposed where the management infrastructure at a gated parking lot must send minimal occupancy data over a VANET so that a vehicle that is about to arrive in the vicinity and intending to park can efficiently predict future occupancy using a continuous‐time Markov model and make a decision about where to park. A probabilistic traffic forecasting system such as the one presented by Horvitz et al. (2012) can also be used along with smart information dissemination (Delot and Ilarri, 2011) to help drivers make informed decisions on where to park and whether to choose a different time to travel.
Parking occupancy data can be analyzed and used in several important areas for the development of a smart city. In addition, studying historic data is essential to improve the system efficiency and parking policy. Parking is a problem related to land use, vehicular traffic, city's revenue, and human flow. The statistics of parking data can indicate key factors for urban development from technical, economic, and environmental perspectives. An application framework must hence be able to perform deep analysis and learning from the collected data. Wang et al. (2016) propose a parallel theory–based approach that can be fairly effective in targeting all the above‐mentioned needs. According to their proposed approach, there must be an artificial system in parallel to the actual system that would constantly analyze and explore different behaviors and situations generated from the actual system and create artificial scenarios and experiments from actual data, which could help in the future for making proactive decisions. Figure 17.13 shows a functional diagram and highlights the interaction among the modules. Such a system can be a very effective mechanism to evaluate, validate, and improve the performance of complex or high‐occupancy parking lots.
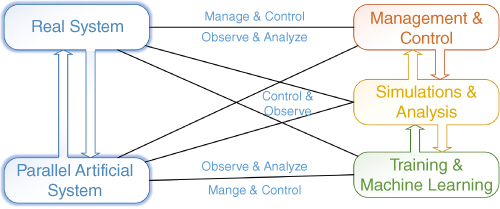
Figure 17.13 A functional diagram of the framework of parallel system of Wang et al. (2016).
17.3.5 User Interfacing
Although the application models and software in existing parking solutions are quite diverse, the interfaces are kind of similar with respect to usability. Overall, the system either displays a set of parking spaces in aggregate and highlights possible available spot locations or shows the best available spot to drive to. Simpler systems with less elaborate infrastructure display a count of available empty spots at the entrance of a lot (Bi et al., 2006; Chen and Chang, 2011; Srikanth et al., 2009) for the driver to decide whether to enter the lot or go to another. Several parking systems also have an interface for fees and payments, which is either integrated with the application or as a separate payment station located in the parking area.
We can classify parking guidance approaches in parking systems into three categories: traditional blind search, system‐assisted parking, and reservation‐based parking. In the traditional blind search, a parking system may at the most display that there are some vacant spots in the lot, and the driver must search for a spot while driving around in the lot. Figure 17.14 shows example interfaces for mobile apps. Such a method certainly provides limited services. In the system‐assisted parking approach, the driver is informed about where there is vacancy either at the entrance or through a mobile app. The location could either be a lane of parking spaces, hence narrowing down the search area, or it could be a precise set of vacant spots displayed for the driver to choose from. To enhance this further, adding a navigation module is fairly straightforward in applications for most modern smart devices, which makes it appealing and easy for the driver to get driving directions to the available spot from the interface (Du and Sun, 2012; Souissi et al., 2011; Wenzhi and Bai, 2006; Yoo et al., 2008; Zheng, Cao, et al., 2006). Although this approach is fair at guiding the users, it could lead to confusion. Basically, multiple users could potentially drive toward the same spot and find it occupied on arrival. Thus, merely displaying spot availability or even allowing the driver to navigate to the location (Wei et al., 2012), is not enough. A user hopes for a parking spot closest to her final destination, before they arrive in the vicinity of the destination.

Figure 17.14 User interfaces for smart phone app, (a) “Park Me” (ParkMeApp, 2016) and (b) “SF Park” (SFMTA, 2016).
Hence, a simple solution would be the third category, namely, a reservation‐based system, where drivers are allowed to reserve a spot (Delot et al., 2013; Pham et al., 2015) from the web, a smart‐app, or by a phone call, before they arrive in order to avoid the hassles of driving around looking for vacant spots. This approach has several drawbacks as well. For example, when a spot is reserved, other drivers cannot use it although it is not occupied, and stays vacant till the reserved vehicle is parked there. Given the impact of reservation on the system throughput, many concerns arise in terms of what should be the timeout of the reservation for cases such as when the driver is late to arrive or changes his plan, a better spot opens up closer to the destination, or how to handle a situation when a driver parks in a spot reserved by someone else, etc. Combining the system‐assisted approach with an intelligent reservation system and smart information dissemination can potentially bring out the best from each system (Delot and Ilarri, 2011).
17.3.6 Comparison of Existing Parking Systems
A complete parking system for a smart city would be one that can incorporate all kinds of parking lots, including street parking. It must also successfully be able to inform real‐time occupancy information to the drivers, who can then navigate their vehicles to an available spot without wasting time. In this subsection we present a comparison of the main features of elect parking systems that are unique by themselves and can successfully cover a majority of the aspects of a complete parking management system for a smart city.
As we can see in Table 17.2, almost all these systems can cover multiple parking lots and hence be able to not only inform the drivers if there is a vacancy in any of the incorporated lots; however, very few systems attempt to incorporate street parking as well. Moreover, of all the solutions covered in the table, only two of them can detect and disseminate occupancy information without the need of any additional hardware infrastructure. These two solutions, namely Yamashita and Takami (2014) and Delot et al. (2013), require VANET‐based communication and processing, which implies the need for all vehicles to be equipped with the necessary hardware and software. Being distributed, these two solutions are also the only systems that do not need storage infrastructure to store and retrieve data. Those that do require hardware infrastructure for occupancy detection and dissemination require at least one type of sensor as well as communication support to exchange information between vehicles, infrastructure, and/or server.
Table 17.2 Comparison of Existing Parking Solutions.

|
Some of the systems in Table 17.2 have the additional and extremely useful facility of advance reservation of a spot; meanwhile some incorporate a navigation module to help the driver to reach to the reserved or selected spot. Analyzing and learning from the occupancy data can be very helpful to optimize allocation as well as for developing an efficient revenue model for parking fees, if needed. Some of the systems listed in Table 17.2 do attempt to incorporate that to make their system more effective.
17.4 Participatory Sensing–Based Smart Parking
In this section, we describe our own ongoing work on building a system that can overcome most of the issues mentioned in the previous sections (Gupte and Younis, 2015). Basically, we leverage smart IoT devices to accurately determine parking availability. We employ a participatory sensing paradigm to track the status of parking spots. The key advantage of this system is that it completely eliminates the need for hardware infrastructure for parking occupancy data collection. The system is also scalable without any limitations and able to handle all types of parking spots, including street parking. The participatory sensing–based framework we describe in this section displays real‐time information about the parking availability and deals with the whole parking process.
A key challenge with a participatory model for information collection is that people could be less motivated to forward information and provide their input when the cost or effort is significant. Moreover, identifying trustworthy data is a challenge. We address the issue of recruiting participants using an incentive‐based model, and we regulate data quality with a reputation‐scoring module.
17.4.1 The Components
Our framework consists of four major components that seamlessly interact with each other to make up the complete parking system, as explained below.
17.4.1.1 Users
The users of the system have two primary roles, namely, requesters and reporters. Requesters look for available spots to park their vehicle. One of their important duties is to mark their parking spots as used on arrival and unused upon departure. Meanwhile, reporters inform the system about the occupancy of parking spots when they are in the vicinity of these spots. As described below, reporters can also passively participate by allowing their IoT devices to report the occupancy data. The users also allow their social media accounts to connect with the application to extract relationship data, which would be further used in building the leaderboards, as discussed later in this section.
17.4.1.2 IoT Devices
Motivating users to contribute toward a participatory sensing paradigm is a fairly big challenge. If users can provide contributions indirectly and autonomously by allowing their devices to become active reporters, that would boost participation and improve efficiency. For example the parking systems described in Stenneth et al. (2012) and Villanueva et al. (2015) use the available sensors on smart phones to report spot occupancy data without active involvement of the users themselves. In Villanueva et al. (2015) the built‐in magnetometer is used to detect whether a vehicle is present in its surroundings, whereas in Stenneth et al. (2012) the accelerometer, Bluetooth, and GPS sensors on the driver's phone are employed to determine if the vehicle is parked and to report the occupancy of the used spot based on the GPS coordinates. In addition, the phone camera or the smart eyewear, e.g., Google glasses, can be utilized. Basically, image‐processing techniques, accelerometer readings, and geolocation can be applied to detect the presence of a vehicle in a parking spot. The GPS, magnetometer, and accelerometer can precisely give the location and direction of the smart phone, while the images captured from the camera can be processed, as they do for camera‐based sensing, and hence detect occupancy. Moreover, autonomously driven cars are expected to become a common feature on the roads; these cars are equipped with a lot of sensing capabilities, such as a magnetometer to provide a sense of direction, ultrasonic sensors for obstacle detection, and the AVM technology we discussed earlier. Suhr and Jung (2014) utilize the AVM and ultrasonic sensors that are already installed on certain modern vehicles to detect occupancy. The AVM image sequences are used to detect parking spot marks while the ultrasonic sensors assess occupancy in the detected spot area. Using theses autonomous sensing capabilities as means for detecting occupancy and as participatory devices is certainly a viable and promising option.
17.4.1.3 Server
The sensed data is collected at a server, which represents the backbone of the whole system and interfaces the users, IoT devices, and the parking resources. This server is cloud based, having a data‐store and an application engine and providing a platform‐as‐a‐service facility to perform the required computations. It may be hosted and managed by the organization owning or managing the parking area. Figure 17.15 shows the functional organization of our application hosted on the server. The server maintains the processes and communicates the information about the occupancy status of the parking spots. It triggers alerts and updates based on occupancy monitoring, manages the reservations, and assesses compliance to parking regulations. The server manages the registration of users, devices, and vehicles, as well as managing the accounting and billing. The user requests information from and reports data to the server. Similarly, the IoT devices autonomously report their data to the server. The server is also responsible for calculating the user reputation scores and rewards, as discussed later in detail. Using the received data and the reputation framework, the server calculates the spot occupancy.
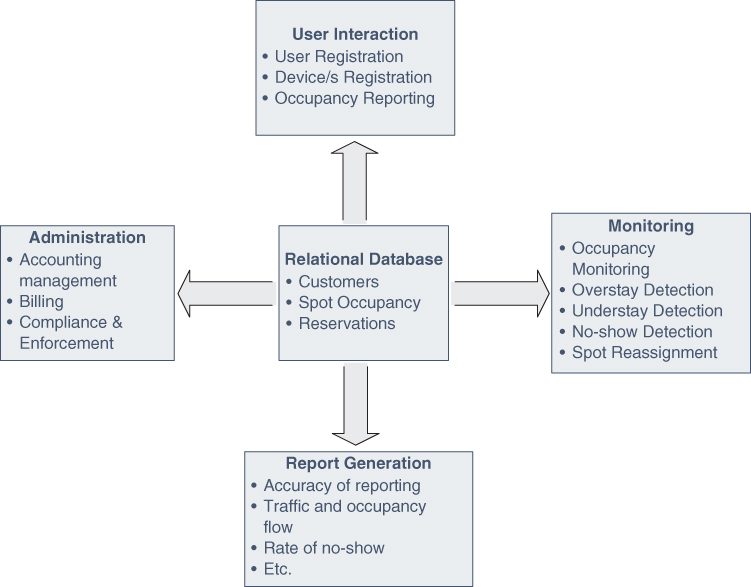
Figure 17.15 Functional organization of the parking management application.
17.4.1.4 Parking Spots
A parking spot is a static entity that has no active role of its own, but it is the main resource that the requester and reporter are concerned with. A parking spot has its availability status, which could toggle between unknown, out of service, reserved, occupied, and available. This status can be changed by the server based on the participatory reporting received from users and other detection devices.
17.4.2 Parking Management Application
The software architecture of our parking system consists of six major interlinked modules, as explained below.
17.4.2.1 User Interface
The goal of a parking system is not only to facilitate finding a parking spot but also to make the whole user experience pleasant. We improve the user experience by proposing an easy to use smart phone–based application that is integrated with other IoT devices and has the latest advancements of payment solutions as well as convenient ticket payment options. Screenshots of our initial Android app are shown in Figure 17.16.
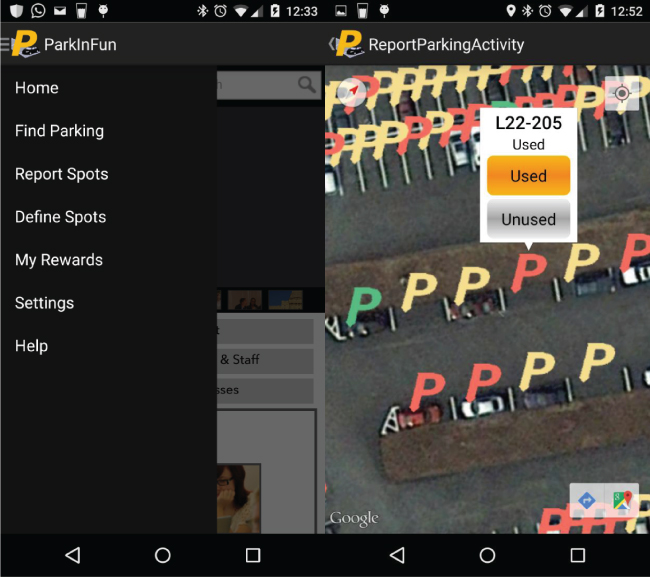
Figure 17.16 Screenshots of our initial parking Android app.
Upon logging into the application, a user can choose between the following two roles:
- Requester: A requester is someone who has arrived or is arriving at a location where her next move is to find a vacant parking spot. Requesters generally are looking for a spot near their current location or near a location that they are expecting to arrive at in a stipulated time. The expectation of a requester is to get different options to choose from based on the availability, proximity, cost, etc.
- Reporter: To minimize the potential of inaccurate assessment of slot occupancy, a user can report a spot status only while being in close proximity to the spot, e.g., based on the GPS sensors on the device. The user is rewarded with “bonus points” based on the reporting. Such a bonus goes toward his rewards as well as leaderboard, as explained below.
17.4.2.2 Smart Reporting System
Besides visually ascertaining a spot status and marking it occupied/available in the app, users can also use other means such as IoT devices introduced above to autonomously or semi‐autonomously achieve the same goal. The rewards and reputation points received or deducted during the process of this reporting is also received by the user who owns the IoT device. The basic operation of the reporting mechanism is described in Figure 17.17.
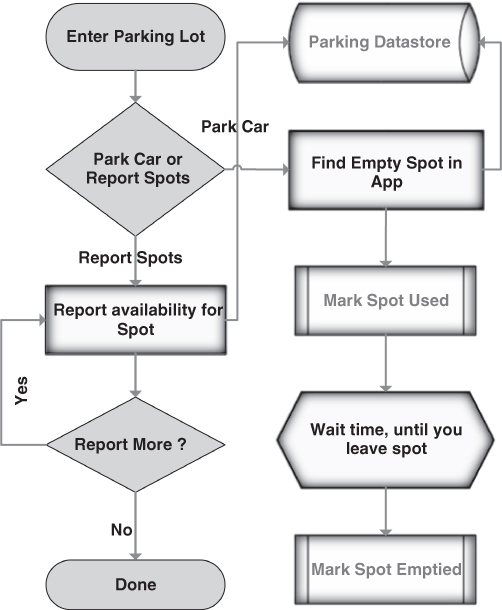
Figure 17.17 Flowchart description of the basic spot‐reporting operation.
17.4.2.3 Leaderboard
A leaderboard that would show how one is doing compared to others, provides more motivation to contribute. The app displays a leaderboard showing the user's rank in her social circle as well as in her geographic vicinity. For example, people can be ranked per locality, city, state, country, etc. The leaderboard system can be integrated with a reward store, where there would be weekly and monthly rankings, i.e., the points would be reset after every week/month. The highest ranked person on the leaderboard by the end of the period could redeem the accumulated points from the rewards store. Figure 17.18 shows a simple leaderboard used in QuizUp, a competitive quiz game that shows how well one is doing compared to other people in a particular geographic vicinity. This leaderboard also shows the monthly points tally as well as all‐time total score.
Figure 17.18 Sample screenshot of leaderboard on the QuizUp Android game.
17.4.2.4 Rewards Store
Users collect points for accurate reporting. These points can be redeemed for various rewards such as:
- dedicated parking spot for X amount of time (shows “reserved” on the spot in the app);
- get monetary credit of some sort, depending on the rewards store of that parking facility;
- reserve an available parking spot for 10 mins (before you arrive or as soon as you arrive); or
- park without restrictions for a day, e.g., get a joker tag.
17.4.2.5 Enforcement and Compliance
Our fully integrated solution can achieve deterrence goals by collecting compliance data. Such data can be used for issuing tickets to violating vehicles. With user involvement, interaction, and feedback on availability and usage of parking spots, it is possible to enforce parking regulations and detect violations. Our system provides an interactive map, where the enforcement agencies/units would be able to view illegally parked vehicles. The system is also able to create precise queries for enforcement activities and add notes for informational use, e.g., parking is not allowed at specific time of the day.
17.4.2.6 External Integration
New technologies are being introduced almost daily to improve revenue, reduce costs, and make parking more convenient. Moreover, there is a large investment in hardware sensor‐based parking systems, and they have been actively deployed and are being used all over. One cannot suddenly switch from such a hardware‐based occupancy sensing system to an infrastructure‐less system. For a smooth transition, it is important to be able to integrate existing systems with the futuristic framework. Therefore, the application must be modular and could be integrated with the available technology such as handheld devices, RFIDs, meters, revenue control systems, sensors, billing software, etc. The solution being modular enough, it would be possible to integrate multiple pay‐by‐phone software/technologies with our solution, voiding the requirement of significant investment in that area.
17.4.3 Data Processing and Cloud Support
Data collected as a result of participatory sensing is the base for parking management in our system. In this subsection we describe how the data is validated and processed and how users get rewarded for collecting the data.
17.4.3.1 Availability Computation
The parking spot availability is computed based on the reporting by multiple users using the following formula:

Where, ![]() reflects availability of parking spot x,
reflects availability of parking spot x, ![]() and
and ![]() indicate a user reporting “used” and “unused,” respectively, and
indicate a user reporting “used” and “unused,” respectively, and ![]() is the user reputation score. If
is the user reputation score. If ![]() <= −100, then spot is confirmed “unused,” and if
<= −100, then spot is confirmed “unused,” and if ![]() >= 100, then the spot is confirmed “used,” and unless it goes beyond either of these values, its status remains as is. If reputation scores of users are low, then it would take more users to verify the availability of a spot, which automatically minimizes malicious user reporting. In the same way, users with high reputation scores help in getting accurate availability quickly since their reporting needs to be verified with a lower number of reporters. The steps are explained in the flowchart in Figure 17.19.
>= 100, then the spot is confirmed “used,” and unless it goes beyond either of these values, its status remains as is. If reputation scores of users are low, then it would take more users to verify the availability of a spot, which automatically minimizes malicious user reporting. In the same way, users with high reputation scores help in getting accurate availability quickly since their reporting needs to be verified with a lower number of reporters. The steps are explained in the flowchart in Figure 17.19.

Figure 17.19 Flowchart for spot availability computation.
Each parking spot has a predefined timeout duration, after the end of which the spot status is set based on majoring vote, even if it has not been confirmed to be occupied or unoccupied. The user(s) who have contributed for most votes of occupancy get partial credit in their reputation. For example, if users A, B, and C voted “occupied” and D reported “unoccupied,” at the end of the timeout, even if the total score did not exceed 100, the spot would be marked as occupied, and users A, B, and C receive partial increment in their reputation score for the reporting. The spot reporting timeout is computed based on learning and depends on the frequency of user reporting. For example, if a parking lot during peak hours receives frequent reporting and the occupancy status can be toggled and confirmed on an average of 10 minutes, then setting the timeout period to 12 minutes would be fair. Similarly, for off‐peak hours, tweaking the timeout to 30 minutes, if there are not frequent changes in occupancy status, would make it more efficient. Our simulation results capture the effect of the timeout duration on the accuracy of the system.
17.4.3.2 Reputation System
Our system includes a reputation‐tracking mechanism that minimizes malicious reporting and helps in giving accurate spot availability. Every user is assigned a reputation score from 0 to 99, where 99 reflects a user with the best reputation. Such a score quantifies the truthfulness of a reporter. Every time the sensed data is found to be inaccurate, the reputation score of the reporter gets decremented and vice versa. Changing the status of a spot requires a total score that exceeds 100. Since a user can never have a reputation score of 100, no one can single‐handedly change the spot status without being confirmed by at least one other person. The truthfulness of a user's report on spot availability is based on the aggregate score and hence is verified by other user(s) for the same parking spot. Every correct reporting increases the reputation score and boosts the fidelity of the spot status assessment. A user can also receive partial credit toward her reputation if the vote collection for a spot times out before reaching a confirmed occupancy decision, as mentioned in the previous paragraph.
Reputation scores of individual users are reset every predefined number of days. The scores of the various users do not reset on the same day but on random days instead. Users are also encouraged to report that they themselves have used a parking spot and then report again on departure. Failure to report this information leads to decrease in the reputation score. The reputation score mechanism not only helps to weed out incorrect reporting but also prevents malicious users from receiving reporting points toward rewards and leaderboard.
17.4.3.3 Scoring System
As mentioned earlier, users also receive points for reporting. All users whose reports match the voted majority receive points that go toward their rewards store as well as leaderboard. Unlike the reputation score, these points do not get decremented for incorrect reporting. The points in the rewards store can be redeemed for rewards as mentioned in the previous subsection. The points that go on the leaderboard get reset per the rules of the leaderboard, e.g., a daily leaderboard gets reset every night at midnight, etc.
17.4.3.4 Reservation Model
Reserving a parking spot is not as trivial as allotting a spot to a user and making it unavailable to others. To have a smooth and efficient reservation system, our framework supports the enforcement of business rules. The rules could be to adopt policy on tardiness, no‐show, and noncompliance. Moreover, the reservation protocol also considers the estimated time of arrival and projected availability to reserve the spot for higher efficiency and throughput. This would also maximize the probability that the spot would still be vacant when the driver arrives.
17.4.3.5 Analysis and Learning
Every parking operation generates a huge amount of data, but it is difficult to analyze parking data to improve productivity. We apply data mining and machine learning for analysis. We analyze and study the data as it comes, to provide users with an experience that gets better every day and we can evolve our solution based on the study on not just traffic trends but also ethnography.
17.4.4 Implementation and Performance Evaluation
17.4.4.1 Prototype Application
Our initial prototype application is built for Android devices. In the application, users can view the parking spot availability and navigate to it. Users can also report the availability of spots if they are in close proximity. The app calculates the spot availability based on the logic explained in the previous subsection. An approved user also can define parking lots and populate a lot with spots, which also becomes a participatory way of adding a new parking facility into our system. We use the Google cloud platform to host our app and store the data, as well as run the processing and analysis. Figure 17.16 shows a sample screenshots.
17.4.4.2 Experiment Setup
To assess the accuracy of the system, we simulate several users with smart devices that would provide participatory data. We also use some real users with real devices to provide the data. We compare the true spot availability information with the calculated spot availability by our framework. We consider a real‐world scenario of the parking lot 22 at UMBC, which has 480 parking spots. We use the real parking availability information of total number of cars occupying a lot at a given time of day for a range of days, as provided by the UMBC Parking Services. We run each of the simulation for Monday to Thursday. In the simulation, the following assumptions are made. A person's reputation score is reset every 7 days, and the parking spot availability is reset to “unknown” every midnight. The average number of reporting users follows Poisson distribution with λ = 60.
Since we do not use an artificially intelligent agent to simulate human behavior in reporting the spot availability, we use a fixed truthfulness level. Say, if for a particular simulation we use truthfulness of 90, then a particular simulated user would report the true availability 90% of the times. Simulated user's truthfulness not only helps in varying their reputation score but also in avoiding frequent changes in parking spot status. A user earns reputation points for correct reports, loses points for incorrect reports, and gets partial reputation points for benefit of doubt in case the spot times out. In addition, a user earns reputation points for reporting that he parked his car on the spot and loses points on failure to report that he vacated his parking spot. For our simulation, we assume that users would earn 1 point for reporting their parking spot and 1 more when confirmed by other user(s) and similarly lose 2 points for not reporting. Unless explicitly mentioned, the initial reputation scores of a simulated user is randomly picked between 35 and 99.
17.4.4.3 Simulation Results
Figure 17.20 shows the results based on the average of four days. We observe that as the day progresses, our system reports accurate status for 83–90% of the spots, most of the remaining spots are displayed as “unknown,” and very few are reported inaccurately. Since there are fewer users reporting early in the day, it is difficult to verify the availability, which results in more inaccurate reports. That drastically tapers down after 10:00 a.m., as the number of participants increases. It is worth noting that in practice the inaccurate status would not be a concern since it is observed only during times of low demand, and hence many vacant spots are available for parking.

Figure 17.20 Average accuracy of system.
We have studied the effect of the average number of participants. As indicated by the results in Figure 17.21, the number of users does matter but only up to a certain extent, after which the accuracy does not considerably improve with the increase in reporting user count. Such an observation is attributed to how occupancy is assessed using the reputation scores. If a smaller number of users can successfully confirm the occupancy status, then even if more users report after that, it would not matter. For example, assume that four users voted that a particular spot is occupied, and according to our calculation the spot got confirmed to be “occupied”; now having two more reports within the timeout will not contribute toward any improvement.

Figure 17.21 Number of accurate spot status under varying number of reports.
We have also varied the average reputation score range of all the reporting users. In a real scenario, it is impossible for all users to have a low reputation score or all to have a high reputation score, but our results in Figure 17.22 show that even with all users having scores between 40 and 55, our system would still display accurate availability for 53–58% of the spots, while the rest are displayed as “unknown.” Figure 17.23, on the other hand, shows the effect of varying the truthfulness range of users, starting with 40–55% of users reporting true values, to 90–99% of users reporting true values. The figure indicates that if users are reporting the spots honestly, it will lead to accurate spot availability; however, reporting false status will only result in more “unknown” values and does not lead to inaccurate spot status. This provides significant insight about how users' honesty would matter in our system. Using the reputation system and applying location constraints in reporting the spot status, we assure a high level of true participatory reporting.
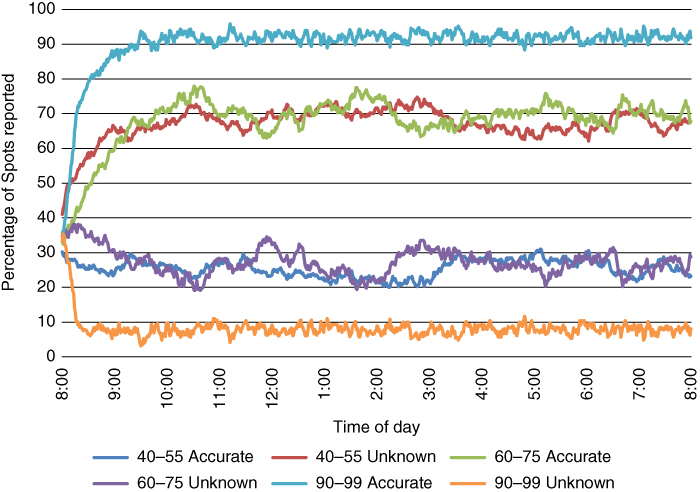
Figure 17.22 Effect of reputation scores on number of spots with accurate and unknown status.
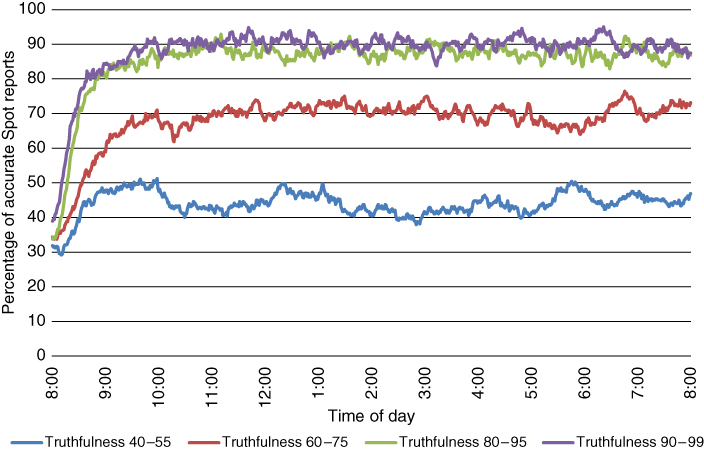
Figure 17.23 Number of accurate spot reports with varying user truthfulness.
17.4.5 Features and Benefits
One of the greatest benefits of our system is that it eliminates the need for any additional hardware or sensing infrastructure. This in turn makes the system setup quick, lightweight, and completely non‐intrusive and non‐obstructive. It does not need to disturb or change anything physically when initializing or removing the system for a parking lot, which helps in scaling easily and quickly. This also aids in supporting all kinds of parking lots and structures including street parking and multi‐level parking. The spot occupancy detection accuracy does not depend on physical or environmental factors; instead it depends on human participatory engagement. As our experiments show, we can achieve near real‐time spot occupancy detection, with minimal engagement. Our experiments in the previous section cover all scenarios, but we assume participation from users to be proportionate to the density of occupied spots and need at the time of the hour, meaning, high‐occupancy parking lots will have greater participation and hence, more accurate and precise occupancy displayed. Similarly, low‐occupancy lots will have proportionately less participation but will hence have high availability of spots, so they do not need as much participation or accuracy.
Since we use smart phones for sensing as well as data transfer, the power consumption or energy efficiency does not need to be considered as a factor in the system. Moreover, the communication infrastructure for the parking system is the same as the normal network for data exchange in telecommunication networks; therefore, factors such as transmission range, transmission efficiency, and signal interference are not variables in the system. The only infrastructure needed is a storage infrastructure to store global occupancy data, which we currently envision as being centralized. This does not bring it to a disadvantage since almost all parking systems need hardware infrastructure to store occupancy data. But this too can be possibly made distributed and be eliminated completely, as we allude in the next section. Of the parking guidance approaches described in Section 17.3.5, our application interface supports system‐assisted parking as well as reservation‐based parking, hence providing easy navigation to unoccupied spot. During the system‐assisted navigation the system temporarily changes the status of the intended spot to “reserved” hence avoiding multiple drivers racing for the same spot.
Our system can be easily integrated with other systems and modules such as payment regulation, ticket generation, etc. It can also be operated in parallel with existing sensor systems hence allowing a smooth transition from older systems, while validating the accuracy with the sensor‐provided data. Hence, we optimize the use of available parking facilities, make the commuters aware of the available locations, keep track of parking offences, and speed up the process of finding a spot.
17.5. Conclusions and Future Advancements
Parking is certainly a global urban problem and one of the major concerns in a smart city. With parking information collected from sensing infrastructure or through participatory sensing, smart‐parking services can provide a good platform to mitigate if not completely resolve the pain of finding a parking spot. A smart parking management system will enable drivers to shorten their travel time, and improve revenues as well as efficient utilization of the parking space. In this chapter, we have provided a general classification of parking systems. We have surveyed existing solutions and highlighted the most important aspects, advantages, and shortcomings. We have categorized regular parking systems based on the sensing infrastructure, the communication infrastructure, the storage infrastructure, application infrastructure, and user interfacing. We have also provided a brief analysis of some parking systems that we deem as unique and promising. Our survey has pointed out that deployment and maintenance of hardware sensors is a major cost burden. Moreover, to obtain a higher level of accuracy in these systems, it is also needed to employ multiple sensor modalities which require even higher expenditure. To overcome the technical issues and high costs associated with such hardware sensor‐based occupancy assessment, we have promoted a participatory sensing‐enabled parking management system.
We have presented a participatory sensing framework for tracking parking spot availability. Our framework employs an efficient reputation‐scoring mechanism to mitigate potential inaccurate and unknown parking spot statuses. In order to boost participation, we employ an incentive‐ and leaderboard‐based parking model. Our framework can also enable improved enforcement of parking regulation and prevent unauthorized access, as well as address any spillover problems that may occur. It is also possible to integrate fee collection, ticket generation and payment, etc. We have validated the effectiveness of our approach with real and simulated user participation. The results demonstrate that it is possible to accurately determine parking spot availability, even with nominal level of user participation. The results also show that our reputation‐scoring mechanism successfully prevents malicious or careless users from undermining the system operation.
While our system is a significant step ahead of existing solutions in terms of increased capabilities and reduced cost, the current implementation relies on cloud‐based storage and processing services. Realizing our framework using distributed rather than cloud‐based setup and integrating VANET‐based information dissemination and processing would make the system more versatile and scalable. In addition, we plan on creating leaderboards using social networks to obtain relationship information for higher user engagement. Moreover, leveraging the social ties between drivers from social networks to display who contributed toward the data would also improve the efficiency of the system while strengthening drivers' trust in the participatory data. Stored occupancy data can be used for prediction, learning and, data analysis, to improve efficiency of the system as well as guide parking policies and regulate parking rates based on traffic flow. Moreover, using smart information dissemination along with historic occupancy data can help drivers to make informed decisions on where to park or what time to travel or whether to travel to that locality. Finally, large‐scale testing of the system in a populous urban setup is important for performance tuning and factoring in the behavior of drivers in real scenarios.
References
- Al‐Absi, H.R., Devaraj, J.D.D., Sebastian, P., and Voon, Y.V., 2010, ‘Vision‐based automated parking system’, In: 10th International Conference on Information Sciences Signal Processing and their Applications (ISSPA), 2010, IEEE, 757–760.
- Antoniou, C., Koutsopoulos, H.N., and Yannis, G., 2007, ‘Traffic state prediction using Markov chain models’, In: Proceedings of the European Control Conference, 2–5.
- Bachani, M., Qureshi, U.M., and Shaikh, F.K., 2016, ‘Performance Analysis of Proximity and Light Sensors for Smart Parking’, [online] 83, 385–392. URL: http://www.sciencedirect.com/science/article/pii/S1877050916302332.
- Banerjee, S., Choudekar, P., and Muju, M., 2011, ‘Real time car parking system using image processing’, In: 3rd International Conference on Electronics Computer Technology (ICECT), 2011, IEEE, 99–103.
- Barone, R.E., Giuffrè, T., Siniscalchi, S.M., Morgano, M.A., and Tesoriere, G., 2014, ‘Architecture for parking management in smart cities’, IET Intelligent Transport Systems, 8(5), 445–452.
- Benson, J.P., O'Donovan, T., O'Sullivan, P., Roedig, U., Sreenan, C., Barton, J., Murphy, A., and O'Flynn, B., 2006, ‘Car‐park management using wireless sensor networks’, In: Proceedings. 2006 31st IEEE Conference on Local Computer Networks, IEEE, 588–595.
- Bi, Y., Sun, L., Zhu, H., Yan, T., and Luo, Z., 2006, ‘A parking management system based on wireless sensor network’, Acta Automatica Sinica 32(6), 968.
- Boda, V.K., Nasipuri, A., and Howitt, I., 2007, ‘Design considerations for a wireless sensor network for locating parking spaces’, In: Proceedings 2007 IEEE SoutheastCon, IEEE, 698–703.
- Burke, J.A., Estrin, D., Hansen, M., Parker, A., Ramanathan, N., Reddy, S., and Srivastava, M.B., 2006, ‘Participatory sensing’, Center for Embedded Network Sensing.
- Cao, Z. and Kong, Q., 2011, ‘A vehicle management system of community based on radio frequency identification technology’, In: 3rd International Conference on Communication Software and Networks (ICCSN), 2011, IEEE, 341–343.
- Cervantes, L.F., Lee, Y.‐S., Yang, H., and Lee, J., 2007, ‘A hybrid middleware for RFID‐based parking management system using group communication in overlay networks’, In: The 2007 International Conference on Intelligent Pervasive Computing, 2007, IPC, IEEE, 521–526.
- Chen, L.C., Hsieh, J.W., Lai, W.R., Wu, C.X., and Chen, S.Y., 2010, ‘Vision‐Based Vehicle Surveillance and Parking Lot Management Using Multiple Cameras’, In: 2010 Sixth International Conference on Intelligent Information Hiding and Multimedia Signal Processing (IIH‐MSP), 631–634.
- Chen, M. and Chang, T., 2011, ‘A parking guidance and information system based on wireless sensor network’, In: 2011 IEEE International Conference on Information and Automation (ICIA), IEEE, 601–605.
- Chinrungrueng, J., Sunantachaikul, U., and Triamlumlerd, S., 2007, ‘Smart Parking: An Application of Optical Wireless Sensor Network’, In: International Symposium on Applications and the Internet Workshops, 2007. SAINT Workshops 2007,.66.
- Cisco‐Systems‐Inc., 2016, Cisco—Smart+Connected Parking : URL: http://www.cisco.com/c/en/us/solutions/industries/smart‐connected‐communities/city‐parking.html, Accessed Aug 2016.
- Civicsmart‐Inc, 2016, URL: http://www.civicsmart.com/, Accessed Aug 2016.
- Daubaras, A. and Zilys, M., 2012, ‘Vehicle detection based on magneto‐resistive magnetic field sensor,’ Elektronika ir Elektrotechnika 118(2), 27–32.
- Delot, T., Ilarri, S., Lecomte, S., and Cenerario, N., 2013, ‘Sharing with Caution: Managing Parking Spaces in Vehicular Networks’, Mobile Information Systems 9(1):69–98.
- Delot, T. and Ilarri, S., 2011, ‘Data gathering in vehicular networks: The VESPA experience’ (invited paper), In: Fifth IEEE Workshop On User MObility and VEhicular Networks (LCN ON‐MOVE 2011), 801–808.
- Deng, H., Jiang, D., and Wei, Y., 2006, ‘Parking cell detection of multiple video features with PCA‐and‐Bayes‐based classifier’, In: 2006 IEEE International Conference on Information Acquisition, IEEE, 655–659.
- Du, S. and Sun, S., 2012, ‘The research and design of intellectual parking system based on RFID’, In: 2012 9th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), IEEE, 2427–2430.
- Ferreira, M., Damas, L., Conceiçao, H., d Orey, P.M., Fernandes, R., Steenkiste, P., and Gomes, P., 2014, ‘Self‐automated parking lots for autonomous vehicles based on vehicular ad hoc networking’, In: 2014 IEEE Intelligent Vehicles Symposium Proceedings, IEEE, 472–479.
- Ganchev, I., O'Droma, M., and Meere, D., 2008. ‘Intelligent car parking locator service’, Information Technologies and Knowledge 2, 166–173.
- Gupte, S. and Younis, M., 2015, ‘Participatory‐sensing‐enabled efficient Parking Management in modern cities’, In: 2015 IEEE 40th Conference on Local Computer Networks (LCN), IEEE, 241–244.
- Horvitz, E.J., Apacible, J., Sarin, R., and Liao, L., 2012, ‘Prediction, expectation, and surprise: Methods, designs, and study of a deployed traffic forecasting service’, arXiv preprint: 1207.1352.
- Huang, C.‐H., Hsu, H.‐S., Wang, H.‐R., Yang, T.‐Y., and Huang, C.‐M., 2015, ‘Design and management of an intelligent parking lot system by multiple camera platforms’, In: 2015 IEEE 12th International Conference on Networking, Sensing and Control (ICNSC), IEEE, 354–359.
- Huang, Y., Huang, X., and Sun, Q., 2011, ‘The Design of the management system for parking lot based on 2.45 GHz active RFID’, In: 2011 International Conference on Computer Science and Service System (CSSS), IEEE, 850–853.
- INRIX, 2016, URL: http://inrix.com/, Accessed Aug 2016.
- ITS‐America, 2016, ‘ITS America—Smart City’, URL: https://itsamerica2016.org/wp‐content/uploads/2016/08/Making‐Cities‐Smarter.Alex‐Israel.pdf, Accessed Aug 2016.
- Kim, J., Kim, H., Jeong, J., Seo, Y., and Mah, P., 2010, ‘Field Deployment of a Large‐Scale WSN for Parking Management System’, In: 2010 7th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), 1–3.
- Klappenecker, A., Lee, H., and Welch, J.L., 2014, ‘Finding available parking spaces made easy’, Ad Hoc Networks 12, 243–249.
- Lixia, W., and Dalin, J., 2012, ‘A method of parking space detection based on image segmentation and lbp’, In: 2012 Fourth International Conference on Multimedia Information Networking and Security. IEEE, 229–232.
- Lu, R., Lin, X., Zhu, H., and Shen, X., 2009, ‘SPARK: a new VANET‐based smart parking scheme for large parking lots’, In: INFOCOM 2009, IEEE, 1413–1421.
- Mainetti, L., Patrono, L., Stefanizzi, M.L., and Vergallo, R., 2015, ‘A Smart Parking System based on IoT protocols and emerging enabling technologies’, In: 2015 IEEE 2nd World Forum on Internet of Things (WF‐IoT), IEEE, 764–769.
- Marathay, A.S. and McCalmont, J.F., 2001, ‘Vector diffraction theory for electromagnetic waves’, J. Opt. Soc. Am. A [online] 18(10), 2585–2593, URL: http://josaa.osa.org/abstract.cfm?URI=josaa‐18‐10‐2585.
- Pala, Z. and Inanc, N., 2007, ‘Smart parking applications using RFID technology’, In: 1st Annual RFID Eurasia, 2007, IEEE, pp.1–3.
- ParkMeApp, 2016, ‘Park Me App’, URL: https://www.parkme.com/, Accessed Dec 2016.
- Pham, T.N., Tsai, M.‐F., Nguyen, D.B., Dow, C.‐R., and Deng, D.‐J., 2015, ‘A Cloud‐Based Smart‐Parking System Based on Internet‐of‐Things Technologies’, IEEE Access 3, 1581–1591.
- Prasad, A.G., Sharath, U., Amith, B., Supritha, B., Asokan, S., and Hegde, G., 2012, ‘Fiber Bragg Grating sensor instrumentation for parking space occupancy management’, In: 2012 International Conference on Optical Engineering (ICOE), IEEE, 1–4.
- Rahman, M.S., Park, Y., and Kim, K.‐D., 2009, ‘Relative location estimation of vehicles in parking management system’, In: 2009. 11th International Conference on Advanced Communication Technology, 2009, ICACT, IEEE, 729–732.
- Rico, J., Sancho, J., Cendon, B., and Camus, M., 2013, ‘Parking Easier by Using Context Information of a Smart City: Enabling Fast Search and Management of Parking Resources’, In: 2013 27th International Conference on Advanced Information Networking and Applications Workshops (WAINA),1380–1385.
- Roy, K., Levy, B., and Tomlin, C.J., 2006, ‘Target tracking and estimated time of arrival (ETA) prediction for arrival aircraft’, In: Proceedings of AIAA Guidance, Navigation, and Control Conference, Keystone, CO.
- Scola, N., 2014, ‘What Happened When a Designer Watched the Devices That Watch New York’, URL: https://nextcity.org/daily/entry/new‐york‐city‐cameras‐watch‐sensors.
- SFMTA, 2016, ‘SF Park’, http://sfpark.org/, Accessed Dec 2016.
- Siemens‐AG, 2016. ‘Integrated Smart Parking Solution’, URL: http://www.mobility.siemens.com/mobility/global/en/urban‐mobility/road‐solutions/integrated‐smart‐parking‐solution/pages/integrated‐smart‐parking‐solution.aspx, Accessed Aug 2016.
- Souissi, R., Cheikhrouhou, O., Kammoun, I., and Abid, M., 2011, ‘A parking management system using wireless sensor networks’, In: ICM 2011 Proceedings, IEEE, 1–7.
- Srikanth, S., Pramod, P., Dileep, K., Tapas, S., Patil, M.U., and others, 2009, ‘Design and implementation of a prototype smart parking (spark) system using wireless sensor networks’, In: International Conference on Advanced Information Networking and Applications Workshops, 2009. WAINA'09, IEEE, 401–406.
- Stenneth, L., Wolfson, O., Xu, B., and Philip, S.Y., 2012, ‘PhonePark: Street Parking Using Mobile Phones’, In: MDM, 278–279.
- Streetline‐Inc, 2016. ‘The StreetLine Solution’, URL: http://www.streetline.com/, Accessed Aug 2016.
- Suhr, J.K. and Jung, H.G., 2014, ‘Sensor Fusion‐Based Vacant Parking Slot Detection and Tracking’, IEEE Transactions on Intelligent Transportation Systems 15(1), 21–36.
- US‐Dept‐of‐Transportation, 2016, ‘DOT—Smart City Challenge’, URL: https://www.transportation.gov/smartcity, Accessed Aug 2016.
- US‐Dept‐of‐Transportation‐SmartCity, 2016, ‘SmartCity Vision Statement’, URL: Columbushttps://www.transportation.gov/smartcity/visionstatements/columbusoh, Accessed Aug 2016.
- US‐DOT, 2007, ‘A summary of vehicle detection and Surveillance Technologies used in Intelligent Transportation Systems’, URL: http://www.fhwa.dot.gov/ohim/tvtw/vdstits.htm.
- Villanueva, F.J., Villa, D., Santofimia, M.J., Barba, J., and López, J.C., 2015, ‘Crowdsensing smart city parking monitoring’, In: 2015 IEEE 2nd World Forum on Internet of Things (WF‐IoT), IEEE, 751–756.
- Wang, F.‐Y., Yang, L.‐Q., Yang, J., Zhang, Y., Han, S., and Zhao, K., 2016, ‘Urban intelligent parking system based on the parallel theory’, In: 2016 International Conference on Computing, Networking and Communications (ICNC), IEEE, 1–5.
- Wei, L., Wu, Q., Yang, M., Ding, W., Li, B., and Gao, R., 2012, ‘Design and implementation of smart parking management system Based on RFID and internet’, In: 2012 International Conference on Control Engineering and Communication Technology (ICCECT), IEEE, 17–20.
- Wenzhi, C. and Bai, L., 2006, ‘A smart roadside parking navigation system based on sensor networks for ITS’, In: 2006 IET International Conference on Wireless, Mobile and Multimedia Networks, IET, 1–4.
- Yamashita, S. and Takami, K., 2014, ‘Autonomous, Distributed Parking Lot Vacancy Management Using Intervehicle Communication’, International Journal of Vehicular Technology.
- Yan, G., Yang, W., Rawat, D.B., and Olariu, S., 2011, ‘SmartParking: A secure and intelligent parking system’, IEEE Intelligent Transportation Systems Magazine, 3(1), 18–30.
- Yoo, S., Chong, P.K., Kim, T., Kang, J., Kim, D., Shin, C., Sung, K., and Jang, B., 2008, ‘Pgs: Parking guidance system based on wireless sensor network’, In: ISWPC 2008. 3rd International Symposium on Wireless Pervasive Computing, 2008, IEEE, 218–222.
- Yousefi, S., Mousavi, M.S., and Fathy, M., 2006, ‘Vehicular ad hoc networks (VANETs): challenges and perspectives’, In: 2006 6th International Conference on ITS Telecommunications, IEEE, 761–766.
- Zheng, Y., Cao, J., and others, 2006, ‘An intelligent car park management system based on wireless sensor networks’, In: 2006 First International Symposium on Pervasive Computing and Applications, IEEE, 65–70.
- Zhong, Y., Guo, W., and Zeng, L., 2010, ‘Visual navigational method of parking management based on indoor precise real‐time location’, In: 2010 International Conference on Computer and Communication Technologies in Agriculture Engineering, IEEE, 227–229.