
3
Power Bipolar Transistors
Engineering Division, Colorado School of Mines, Golden, Colorado, USA
3.1 Introduction
3.2 Basic Structure and Operation
3.4 Dynamic Switching Characteristics
3.5 Transistor Base Drive Applications
3.6 SPICE Simulation of Bipolar Junction Transistors
3.7 BJT Applications
3.1 Introduction
The first transistor was discovered in 1948 by a team of physicists at the Bell Telephone Laboratories and soon became a semiconductor device of major importance. Before the transistor, amplification was achieved only with vacuum tubes. Even though there are now integrated circuits with millions of transistors, the flow and control of all the electrical energy still require single transistors. Therefore, power semiconductors switches constitute the heart of modern power electronics. Such devices should have larger voltage and current ratings, instant turn-on and turn-off characteristics, very low voltage drop when fully on, zero leakage current in blocking condition, ruggedness to switch highly inductive loads which are measured in terms of safe operating area (SOA) and reverse-biased second breakdown (ES/b), high temperature and radiation withstand capabilities, and high reliability. The right combination of such features restrict the devices suitability to certain applications. Figure 3.1 depicts voltage and current ranges, in terms of frequency, where the most common power semiconductors devices can operate.

FIGURE 3.1 Power semiconductor operating regions; (a) voltage vs frequency and (b) current vs frequency.
The plot gives actually an overall picture where power semiconductors are typically applied in industries: high voltage and current ratings permit applications in large motor drives, induction heating, renewable energy inverters, high voltage DC (HVDC) converters, static VAR compensators, and active filters, while low voltage and high-frequency applications concern switching mode power supplies, resonant converters, and motion control systems, low frequency with high current and voltage devices are restricted to cycloconverter-fed and multimegawatt drives.
Power-npn or -pnp bipolar transistors are used to be the traditional component for driving several of those industrial applications. However, insulated gate bipolar transistor (IGBT) and metal oxide field effect transistor (MOSFET) technology have progressed so that they are now viable replacements for the bipolar types. Bipolar-npn or -pnp transistors still have performance areas in which they may be still used, for example they have lower saturation voltages over the operating temperature range, but they are considerably slower, exhibiting long turn-on and turn-off times. When a bipolar transistor is used in a totem-pole circuit the most difficult design aspects to overcome are the based drive circuitry. Although bipolar transistors have lower input capacitance than that of MOSFETs and IGBTs, they are current driven. Thus, the drive circuitry must generate high and prolonged input currents.
The high input impedance of the IGBT is an advantage over the bipolar counterpart. However, the input capacitance is also high. As a result, the drive circuitry must rapidly charge and discharge the input capacitor of the IGBT during the transition time. The IGBTs low saturation voltage performance is analogous to bipolar power-transistor performance, even over the operating-temperature range. The IGBT requires a − 5 to 10V gate–emitter voltage transition to ensure reliable output switching.
The MOSFET gate and IGBT are similar in many areas of operation. For instance, both devices have high input impedance, are voltage-driven, and use less silicon than the bipolar power transistor to achieve the same drive performance. Additionally, the MOSFET gate has high input capacitance, which places the same requirements on the gate–drive circuitry as the IGBT employed at that stage. The IGBTs outperform MOSFETs when it comes to conduction loss vs supply-voltage rating. The saturation voltage of MOSFETs is considerably higher and less stable over temperature than that of IGBTs. For such reasons, during the 1980s, the insulated gate bipolar transistor took the place of bipolar junction transistors (BJTs) in several applications. Although the IGBT is a cross between the bipolar and MOSFET transistor, with the output switching and conduction characteristics of a bipolar transistor, but voltage-controlled like a MOSFET, early IGBT versions were prone to latch up, which was largely eliminated. Another characteristic with some IGBT types is the negative temperature coefficient, which can lead to thermal runaway and making the paralleling of devices hard to effectively achieve. Currently, this problem is being addressed in the latest generations of IGBTs.
It is very clear that a categorization based on voltage and switching frequency are two key parameters for determining whether a MOSFET or IGBT is the better device in an application. However, there are still difficulties in selecting a component for use in the crossover region, which includes voltages of 250–1000 V and frequencies of 20–100 kHz. At voltages below 500 V, the BJT has been entirely replaced by MOSFET in power applications and has been also displaced in higher voltages, where new designs use IGBTs. Most of regular industrial needs are in the range of 1–2 kV blocking voltages, 200–500 A conduction currents, and switching speed of 10–100 ns. Although on the last few years, new high voltage projects displaced BJTs towards IGBT, and it is expected to see a decline in the number of new power system designs that incorporate BJTs, there are still some applications for BJTs; in addition the huge built-up history of equipments installed in industries make the BJT yet a lively device.
3.2 Basic Structure and Operation
The bipolar junction transistor (BJT) consists of a three-region structure of n-type and p-type semiconductor materials, it can be constructed as npn as well as pnp. Figure 3.2 shows the physical structure of a planar npn BJT The operation is closely related to that of a junction diode where in normal conditions the pn junction between the base and collector is forward-biased (VBE > 0) causing electrons to be injected from the emitter into the base. Since the base region is thin, the electrons travel across arriving at the reverse-biased base–collector junction (VBC < 0) where there is an electric field (depletion region). Upon arrival at this junction the electrons are pulled across the depletion region and draw into the collector. These electrons flow through the collector region and out the collector contact. Because electrons are negative carriers, their motion constitutes positive current flowing into the external collector terminal. Even though the forward-biased base–emitter junction injects holes from base to emitter they do not contribute to the collector current but result in a net current flow component into the base from the external base terminal. Therefore, the emitter current is composed of those two components: electrons destined to be injected across the base–emitter junction, and holes injected from the base into the emitter. The emitter current is exponentially related to the base–emitter voltage by the equation:
![]() (3.1)
(3.1)
where iE is the saturation current of the base–emitter junction which is a function of the doping levels, temperature, and the area of the base–emitter junction, VT is the thermal voltage Kt/q, and η is the emission coefficient. The electron current arriving at the collector junction can be expressed as a fraction α of the total current crossing the base–emitter junction
![]() (3.2)
(3.2)

FIGURE 3.2 Structure of a planar bipolar junction transistor.
Since the transistor is a three terminals device, iE is equal to iC + iB, hence the base current can be expressed as the remaining fraction
![]() (3.3)
(3.3)
The collector and base currents are thus related by the ratio
![]() (3.4)
(3.4)
The values of α and β for a given transistor depend primarily on the doping densities in the base, collector, and emitter regions, as well as on the device geometry. Recombination and temperature also affect the values for both parameters. A power transistor requires a large blocking voltage in the off state and a high current capability in the on state, and a vertically oriented four layers structures as shown in Fig. 3.3 is preferable because it maximizes the cross-sectional area through which the current flows, enhancing the on-state resistance and power dissipation in the device. There is an intermediate collector region with moderate doping, the emitter region is controlled so as to have an homogenous electrical field.

FIGURE 3.3 Power transistor vertical structure.
Optimization of doping and base thickness are required to achieve high breakdown voltage and amplification capabilities.
Power transistors have their emitters and bases interleaved to reduce parasitic ohmic resistance in the base current path and also improving the device for second breakdown failure. The transistor is usually designed to maximize the emitter periphery per unit area of silicon, in order to achieve the highest current gain at a specific current level. In order to ensure those transistors have the greatest possible safety margin, they are designed to be able to dissipate substantial power and, thus, have low thermal resistance. It is for this reason, among others, that the chip area must be large and that the emitter periphery per unit area is sometimes not optimized. Most transistor manufacturers use aluminum metalization, since it has many attractive advantages, among these are ease of application by vapor deposition and ease of definition by photolithography. A major problem with aluminum is that only a thin layer can be applied by normal vapor deposition techniques. Thus, when high currents are applied along the emitter fingers, a voltage drop occurs along them, and the injection efficiency on the portions of the periphery that are furthest from the emitter contact is reduced. This limits the amount of current each finger can conduct. If copper metalization is substituted for aluminum, then it is possible to lower the resistance from the emitter contact to the operating regions of the transistors (the emitter periphery).
From a circuit point of view, the Eqs. (3.1)–(3.4) are used to relate the variables of the BJT input port (formed by base (B) and emitter (E)) to the output port (collector (C) and emitter (E)). The circuit symbols are shown in Fig. 3.4. Most of the power electronics applications use npn transistor because electrons move faster than holes, and therefore, npn transistors have considerable faster commutation times.

FIGURE 3.4 Circuit symbols: (a) npn transistor and (b) pnp transistor.
3.3 Static Characteristics
Device static ratings determine the maximum allowable limits of current, voltage, and power dissipation. The absolute voltage limit mechanism is concerned to the avalanche such that thermal runaway does not occur. Forward current ratings are specified at which the junction temperature does not exceed a rated value, so leads and contacts are not evaporated. Power dissipated in a semiconductor device produces a temperature rise and are related to the thermal resistance. A family of voltage–current characteristic curves is shown in Fig. 3.5. Figure 3.5a shows the base current iB plotted as a function of the base–emitter voltage VBE and Fig. 3.5b depicts the collector current iC as a function of the collector–emitter voltage VCE with iB as the controlling variable.

FIGURE 3.5 Family of current-voltage characteristic curves: (a) base–emitter input port and (b) collector–emitter output port.
Figure 3.5 shows several curves distinguished each other by the value of the base current. The active region is defined where flat, horizontal portions of voltage-current curves show “constant” iC current, because the collector current does not change significantly with VCE for a given iB. Those portions are used only for small signal transistor operating as linear amplifiers. Switching power electronics systems on the other hand require transistors to operate in either the saturation region where VCE is small or in the cut off region where the current is zero and the voltage is uphold by the device. A small base current drives the flow of a much larger current between collector and emitter, such gain called beta (Eq. (3.4)) depends upon temperature, VCE and iC Figure 3.6 shows current gain increase with increased collector voltage; gain falls off at both high and low current levels.

FIGURE 3.6 Current gain depends on temperature, VCE and iC.
High voltage BJTs typically have low current gain, and hence Darlington connected devices, as indicated in Fig. 3.7 are commonly used. Considering gains β1 and β2 for each one of those transistors, the Darlington connection will have an increased gain of β1 + β2 + β1β2, diode D1 speedsup the turn-off process, by allowing the base driver to remove the stored charge on the transistor bases.

FIGURE 3.7 Darlington connected BJTs.
Vertical structure power transistors have an additional region of operation called quasi-saturation, indicated in the characteristics curve of Fig. 3.8. Such feature is a consequence of the lightly doped collector drift region where the collector–base junction supports a low reverse bias. If the transistor enters in the hard-saturation region the on-state power dissipation is minimized, but has to be traded off with the fact that in quasi-saturation the stored charges are smaller. At high collector currents beta gain decreases with increased temperature and with quasi-saturation operation such negative feedback allows careful device paralleling. Two mechanisms on microelectronic level determine the fall off in beta, namely conductivity modulation and emitter crowding. One can note that there is a region called primary breakdown due to conventional avalanche of the C–B junction and the attendant large flow of current. The BVSUS is the limit for primary breakdown, it is the maximum collector–emitter voltage that can be sustained across the transistor when it is carrying high collector current. The BVSUS is lower than BVCEO for BVCBO which measure the transistor's voltage standoff capability when the base current is zero or negative. The bipolar transistor have another potential failure mode called second breakdown, which shows as a precipitous drop in the collector–emitter voltage at large currents. Because the power dissipation is not uniformly spread over the device but it is rather concentrated on regions make the local gradient of temperature can rise very quickly. Such thermal runaway brings hot spots which can eventually melt and recrystallize the silicon resulting in the device destruction. The key to avoid second breakdown is to (1) keep power dissipation under control, (2) use a controlled rate of change of base current during turn-off, (3) use of protective snubbers circuitry, and (4) positioning the switching trajectory within the safe operating area (SOA) boundaries.

FIGURE 3.8 Voltage-current characteristics for a vertical power transistor.
In order to describe the maximum values of current and voltage, to which the BJT should be subjected two diagrams, are used: the forward-bias safe operating area (FBSOA) given in Fig. 3.9 and the reverse-bias safe operating area (RBSOA) shown in Fig. 3.10. In the FBSOA the current ICM is the maximum current of the device, there is a boundary defining the maximum thermal dissipation and a margin defining the second breakdown limitation. Those regions are expanded for switching mode operation. Inductive load generates a higher peak energy at turn-off than its resistive counterpart. It is then possible to have a secondary breakdown failure if RBSOA is exceeded. A reverse base current helps the cut off characteristics expanding RBSOA. The RBSOA curve shows that for voltages below VCEO the safe area is independent of reverse bias voltage VEB and is only limited by the device collector current, whereas above VCEO the collector current must be under control depending upon the applied reverse-bias voltage, in addition temperature effects derates the SOA. Ability for the transistor to switch high currents reliably is thus determined by its peak power handling capabilities. This ability is dependent upon the transistor's current and thermal density throughout the active region. In order to optimize the SOA capability, the current density and thermal density must be low. In general, it is the hot spots occurring at the weakest area of the transistor that will cause a device to fail due to second breakdown phenomena. Although a wide base width will limit the current density across the base region, good heat sinking directly under the collector will enable the transistor to withstand high peak power. When the power and heat are spread over a large silicon area, all of these destructive tendencies are held to a minimum, and the transistor will have the highest SOA capability.

FIGURE 3.9 Forward-bias safe operating area (FBSOA).

FIGURE 3.10 Reverse-bias safe operating area (RBSOA).
When the transistor is on, one can ignore the base current losses and calculate the power dissipation on the on state (conduction losses) by Eq. (3.5). Hard saturation minimizes collector–emitter voltage, decreasing on-state losses.
![]() (3.5)
(3.5)
3.4 Dynamic Switching Characteristics
Switching characteristics are important to define the device velocity in changing from conduction (on) to blocking (off) states. Such transition velocity is of paramount importance also because most of the losses are due to high-frequency switching. Figure 3.11 shows typical waveforms for a resistive load. Index “r” refers to the rising time (from 10 to 90% of maximum value), for example tri is the current rise time which depends upon the base current. The falling time is indexed by “f”; the parameter tfi is the current falling time, i.e. when the transistor is blocking such time corresponds to crossing from the saturation to the cut off state. In order to improve tfi the base current for blocking must be negative and the device must be kept in quasi-saturation to minimize the stored charges. The delay time is denoted by td, corresponding to the time to discharge the capacitance of base–emitter junction, which can be reduced with a larger current base with high slope. Storage time (ts) is a very important parameter for BJT transistor, it is the required time to neutralize the carriers stored in the collector and base. Storage time and switching losses are key points to deal extensively with bipolar power transistors. Switching losses occur at both turn-on and turn-off and for high frequency operation the rising and falling times for voltage and current transitions play important role as indicated by Fig. 3.12.

FIGURE 3.11 Resistive load dynamic response.
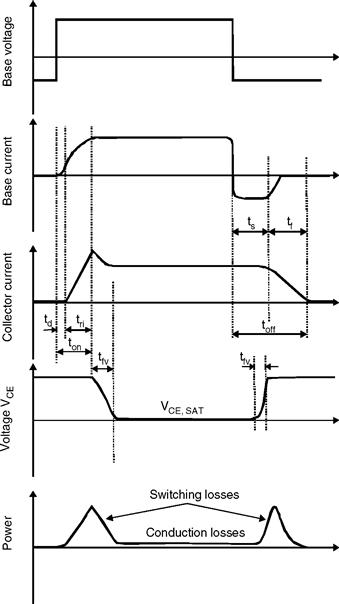
FIGURE 3.12 Inductive load switching characteristics.
A typical inductive load transition is indicated in Fig. 3.13. The figure indicates a turn-off transition. Current and voltage are interchanged at turn-on and an approximation based upon on straight line switching intervals (resistive load) gives the switching losses by Eq. (3.6).
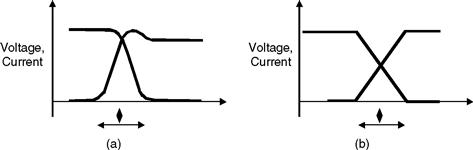
FIGURE 3.13 Turn-off voltage and current switching transition: (a) inductive load and (b) resistive load.
![]() (3.6)
(3.6)
where τ is the period of the switching interval, and VS and IM are the maximum voltage and current levels as shown in Fig. 3.10.
Most advantageous operation is achieved when fast transitions are optimized. Such requirement minimizes switching losses. Therefore, a good bipolar drive circuit highly influences the transistor performance. A base drive circuit should provide a high forward base drive current (IB1) as indicated in Fig. 3.14 to ensure the power semiconductor turn-on quickly. Base drive current should keep the BJT fully saturated to minimize forward conduction losses, but a level IB2 would maintain the transistor in quasi-saturation avoiding excess of charges in base. Controllable slope and reverse current IBR sweeps out stored charges in the transistor base, speeding up the device turn-off.

FIGURE 3.14 Recommended base current for BJT driving.
3.5 Transistor Base Drive Applications
A plethora of circuits have been suggested to successfully command transistors for operating in power electronics switching systems. Such base drive circuits try to satisfy the following requirements: supply the right collector current, adapt the base current to the collector current, and extract a reverse current from base to speed up the device blocking. A good base driver reduces the commutation times and total losses, increasing efficiency and operating frequency. Depending upon the grounding requirements between the control and the power circuits, the base drive might be isolated or non-isolated types. Fig. 3.15 shows a non-isolated circuit. When T1 is switched on T2 is driven and diode D1 is forward-biased providing a reverse-bias keeping T3 off. The base current IB is positive and saturates the power transistor Tp. When T1 is switched off, T3 switches on due to the negative path provided by R3, and −VCC providing a negative current for switching off the power transistor Tp.

FIGURE 3.15 Non-isolated base driver.
When a negative power supply is not provided for the base drive, a simple circuit like Fig. 3.16 can be used in low power applications (step per motors, small dc–dc converters, relays, pulsed circuits). When the input signal is high, T1 switches on and a positive current goes to Tp keeping the capacitor charged with the zener voltage, when the input signal goes low T2 provides a path for the discharge of the capacitor, imposing a pulsed negative current from the base–emitter junction of Tp.

FIGURE 3.16 Base command without negative power supply.
A combination of large reverse base drive and antisaturation techniques may be used to reduce storage time to almost zero. A circuit called Baker's clamp may be employed as illustrated in Fig. 3.17. When the transistor is on, its base is two diode drops below the input. Assuming that diodes D2 and D3 have a forward-bias voltage of about 0.7 V, then the base will be 1.4 V below the input terminal. Due to diode D1 the collector is one diode drop, or 0.7V below the input. Therefore, the collector will always be more positive than the base by 0.7V, staying out of saturation, and because collector voltage increases, the gain β also increases a little bit. Diode D4 provides a negative path for the reverse base current. The input base current can be supplied by a driver circuit similar to the one discussed in Fig. 3.15.

FIGURE 3.17 Antisaturation diodes (Baker's clamp) improve power transistor storage time.
Several situations require ground isolation, off-line operation, floating transistor topology, in addition safety needs may call for an isolated base drive circuit. Numerous circuits have been demonstrated in switching power supplies isolated topologies, usually integrating base drive requirements with their power transformers. Isolated base drive circuits may provide either constant current or proportional current excitation. A very popular base drive circuit for floating switching transistor is shown in Fig. 3.18. When a positive voltage is impressed on the secondary winding (VS) of TR1 a positive current flows into the base of the power transistor Tp which switches on (resistor R1 limits the base current). The capacitor C1 is charged by (VS–VD1 –VBE) and T1 is kept blocked because the diode D1 reverse biases T1 base–emitter. When VS is zipped off, the capacitor voltage VC brings the emitter of T1 to a negative potential with respect to its base. Therefore, T1 is excited so as to switch on and start pulling a reverse current from Tp base. Another very effective circuit is shown in Fig. 3.19 with a minimum number of components. The base transformer has a tertiary winding which uses the energy stored in the transformer to generate the reverse base current during the turn-off command. Other configurations are also possible by adding to the isolated circuits the Baker clamp diodes, or zener diodes with paralleled capacitors.

FIGURE 3.18 Isolated base drive circuit.
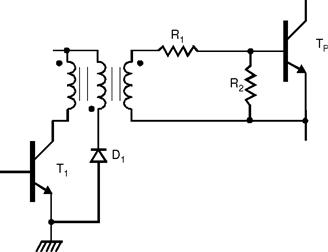
FIGURE 3.19 Transformer coupled base drive with tertiary winding transformer.
Sophisticated isolated base drive circuits can be used to provide proportional base drive currents where it is possible to control the value of β, keeping it constant for all collector currents leading to shorter storage time. Figure 3.20 shows one of the possible ways to realize a proportional base drive circuit. When transistor T1 turns on, the transformer TR1 is in negative saturation and the power transistor Tp is off. During the time that T1 is on, a current flows through winding N1, limited by resistor R1, storing energy in the transformer, holding it into saturation. When the transistor T1 turns off, the energy stored in N1 is transferred to winding N4, pulling the core from negative to positive saturation. The windings N2 and N4 will withstand as a current source, the transistor Tp will stay on and the gain β will be imposed by the turns ratio given by Eq. (3.7).

FIGURE 3.20 Proportional base drive circuit.
![]() (3.7)
(3.7)
In order to use the proportional drive given in Fig. 3.20 careful design of the transformer must be done, so as to have flux balanced which will keep core under saturation. The transistor gain must be somewhat higher than the value imposed by the transformer turns ratio, which requires cautious device matching.
The most critical portion of the switching cycle occurs during transistor turn-off, since normally reverse base current is made very large in order to minimize storage time, such conditions may avalanche the base–emitter junction leading to destruction. There are two options to prevent this from happening: turning off the transistor at low values of collector–emitter voltage (which is not practical in most of the applications) or reducing collector current with rising collector voltage, implemented by RC protective networks called snubbers. Therefore, an RC snubber network can be used to divert the collector current during the turn-off improving the RBSOA in addition the snubber circuit dissipates a fair amount of switching power relieving the transistor. Figure 3.21 shows a turn-off snubber network; when the power transistor is off, the capacitor C is charged through diode D1. Such collector current flows temporarily into the capacitor as the collector–voltage rises; as the power transistor turns on, the capacitor discharges through the resistor R back into the transistor.

FIGURE 3.21 Turn-off snubber network.
It is not possible to fully develop all the aspects regarding simulation of BJT circuits. Before giving an example some comments are necessary regarding modeling and simulation of BJT circuits. There are a variety of commercial circuit simulation programs available on the market, extending from a set of functional elements (passive components, voltage controlled current sources, semiconductors) which can be used to model devices, to other programs with the possibility of implementation of algorithm relationships. Those streams are called subcircuit (building auxiliary circuits around a SPICE primitive) and mathematical (deriving models from internal device physics) methods. Simulators can solve circuit equations exactly, given models for the non-linear transistors, and predict the analog behavior of the node voltages and currents in continuous time. They are costly in computer time and such programs have not been written to usually serve the needs of designing power electronic circuits, rather for designing low-power and low-voltage electronic circuits. Therefore, one has to decide which approach should be taken for incorporating BJT power transistor modeling, and a trade-off between accuracy and simplicity must be considered. If precise transistor modeling are required subcircuit oriented programs should be used. On the other hand, when simulation of complex power electronic system structures, or novel power electronic topologies are devised, the switch modeling should be rather simple, by taking in consideration fundamental switching operations, and a mathematical oriented simulation program should be used.
3.6 SPICE Simulation of Bipolar Junction Transistors
SPICE is a general-purpose circuit program that can be applied to simulate electronic and electrical circuits and predict the circuit behavior. SPICE was originally developed at the Electronics Research Laboratory of the University of California, Berkeley (1975), the name stands for: Simulation Program for Integrated Circuits Emphasis. A circuit must be specified in terms of element names, element values, nodes, variable parameters, and sources. SPICE can do several types of circuit analyses:
• Non-linear dc analysis, calculating the dc transference.
• Non-linear transient analysis: calculates signals as a function of time.
• Linear ac analysis: computes a bode plot of output as a function of frequency.
In addition, PSpice has analog and digital libraries of standard components such as operational amplifiers, digital gates, flip-flops. This makes it a useful tool for a wide range of analog and digital applications. An input file, called source file, consists of three parts: (1) data statements, with description of the components and the interconnections, (2) control statements, which tells SPICE what type of analysis to perform on the circuit, and (3) output statements, with specifications of what outputs are to be printed or plotted. Two other statements are required: the title statement and the end statement. The title statement is the first line and can contain any information, while the end statement is always.END. This statement must be a line be itself, followed by a carriage return. In addition, there are also comment statements, which must begin with an asterisk (*) and are ignored by SPICE. There are several model equations for BJTs.
SPICE has built-in models for the semiconductor devices, and the user need to specify only the pertinent model parameter values. The model for the BJT is based on the integral-charge model of Gummel and Poon. However, if the Gummel–Poon parameters are not specified, the model reduces to piecewise-linear Ebers-Moll model as depicted in Fig. 3.22. In either case, charge-storage effects, ohmic resistances, and a current-dependent output conductance may be included. The forward gain characteristics is defined by the parameters IS and BF, the reverse characteristics by IS and BR. Three ohmic resistances RB, RC and RE are also included. The two diodes are modeled by voltage sources, exponential equations of Shockley can be transformed into logarithmic ones. A set of device model parameters is defined on a separate. MODEL card and assigned a unique model name. The device element cards in SPICE then reference the model name. This scheme lessens the need to specify all of the model parameters on each device element card. Parameter values are defined by appending the parameter name, as given below for each model type, followed by an equal sign and the parameter value. Model parameters that are not given a value are assigned the default values given below for each model type. As an example, the model parameters for the 2N2222A NPN transistor is given below:
.MODEL Q2N2222A NPN (IS=14.34F XTI=3 EG=1.11
VAF= 74.03 BF=255.9 NE=1.307 ISE=14.34F IKF=.2847
XTB=1.5 BR=6.092 NC=2 ISC=0 IKR=0 RC=l CJC=7.306P
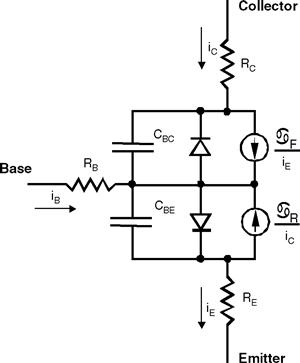
FIGURE 3.22 Ebers-Moll transistor model.
Figure 3.23 shows a BJT buck chopper. The dc input voltage is 12V, the load resistance R is 5Ω, the filter inductance L is 145.84 μH, and the filter capacitance C is 200 μF. The chopping frequency is 25 kHz and the duty cycle of the chopper is 42% as indicated by the control voltage statement (VGI). The listing below plots the instantaneous load current (IOi), the input current (ISi), the diode voltage (VDi>), the output voltage (VCi>), and calculate the Fourier coefficients of the input current (ISi>). It is suggested for the careful reader to have more details and enhancements on using SPICE for simulations on specialized literature and references.

FIGURE 3.23 BJT buck chopper.

3.7 BJT Applications
Bipolar junction power transistors are applied to a variety of power electronic functions, switching mode power supplies, dc motor inverters, PWM inverters just to name a few. To conclude the present chapter, three applications are next illustrated.
A flyback converter is exemplified in Fig. 3.24. The switching transistor is required to withstand the peak collector voltage at turn-off and peak collector currents at turn-on. In order to limit the collector voltage to a safe value, the duty cycle must be kept relatively low, normally below 50%, i.e. 6. < 0.5. In practice, the duty cycle is taken around 0.4, which limits the peak collector. A second design factor which the transistor must meet is the working collector current at turn-on, dependent on the primary transformer-choke peak current, the primary-to-secondary turns ratio, and the output load current. When the transistor turns on the primary current builds up in the primary winding, storing energy, as the transistor turns off, the diode at the secondary winding is forward biasing, releasing such stored energy into the output capacitor and load. Such transformer operating as a coupled inductor is actually defined as a transformer-choke. The design of the transformer-choke of the flyback converter must be done carefully to avoid saturation because the operation is unidirectional on the B–H characteristic curve.

FIGURE 3.24 Flyback converter.
Therefore, a core with a relatively large volume and air gap must be used. An advantage of the flyback circuit is the simplicity by which a multiple output switching power supply may be realized. This is because the isolation element acts as a common choke to all outputs, thus only a diode and a capacitor are needed for an extra output voltage.
Figure 3.25 shows the basic forward converter and its associated waveforms. The isolation element in the forward converter is a pure transformer which should not store energy, and therefore, a second inductive element L is required at the output for proper and efficient energy transfer. Notice that the primary and secondary windings of the transformer have the same polarity, i.e. the dots are at the same winding ends. When the transistor turns on, current builds up in the primary winding. Because of the same polarity of the transformer secondary winding, such energy is forward transferred to the output and also stored in inductor L through diode D2 which is forward-biased. When the transistor turns off, the transformer winding voltage reverses, back-biasing diode D2and the flywheel diode D3 is forward-biased, conducting current in the output loop and delivering energy to the load through inductor L. The tertiary winding and diode D, provide transformer demagnetization by returning the transformer magnetic energy into the output dc bus. It should be noted that the duty cycle of the switch must be kept below 50%, so that when the transformer voltage is clamped through the tertiary winding, the integral of the volt-seconds between the input voltage and the clamping level balances to zero. Duty cycles above 50%, i.e. 6 > 0.5, will upset the volt-seconds balance, driving the transformer into saturation, which in turn produces high collector current spikes that may destroy the switching transistor. Although the clamping action of the tertiary winding and the diode limit the transistor peak collector voltage to twice the dc input, care must be taken during construction to couple the tertiary winding tightly to the primary (bifilar wound) to eliminate voltage spikes caused by leakage inductance.

FIGURE 3.25 Isolated forward converter.
Chopper drives are connected between a fixed-voltage dc source and a dc motor to vary the armature voltage. In addition to armature voltage control, a dc chopper can provide regenerative braking of the motors and can return energy back to the supply. This energy-saving feature is attractive to transportation systems as mass rapid transit (MRT), chopper drives are also used in battery electric vehicles. A dc motor can be operated in one of the four quadrants by controlling the armature or field voltages (or currents). It is often required to reverse the armature or field terminals in order to operate the motor in the desired quadrant. Figure 3.26 shows a circuit arrangement of a chopper-fed dc separately excited motor. This is a one-quadrant drive, the waveforms for the armature voltage, load current, and input current are also shown. By varying the duty cycle, the power flow to the motor (and speed) can be controlled.

FIGURE 3.26 Chopper-fed dc drive.
Further Reading
1. Bose BK. Power Electronics and Ac Drives. Englewood Cliffs, NJ: Prentice-Hall; 1986.
2. Chryssis GC. High Frequency Switching Power Supplies: Theory and Design. NY: McGraw-Hill; 1984.
3. Mohan N, Undeland TM, Robbins WP. Power Electronics: Converters, Applications, and Design. NY: John Wiley & Sons; 1995.
4. Rashid MH. Power Electronics: Circuits, Devices, and Applications. Englewood Cliffs, NJ: Prentice-Hall; 1993.
5. Williams BW. Power Electronics: Devices, Drivers and Applications. NY: John Wiley & Sons; 1987.