
The internals of most modern computer architectures (including x86) follow the Von Neumann architecture, illustrated in Figure 4-2. It has three hardware components:
The central processing unit (CPU) executes code.
The main memory of the system (RAM) stores all data and code.
An input/output system (I/O) interfaces with devices such as hard drives, keyboards, and monitors.
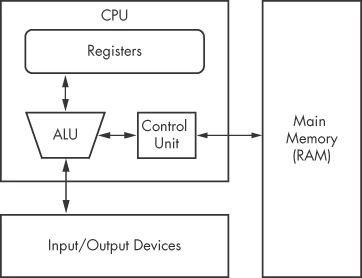
As you can see in Figure 4-2, the CPU contains several components: The control unit gets instructions to execute from RAM using a register (the instruction pointer), which stores the address of the instruction to execute. Registers are the CPU’s basic data storage units and are often used to save time so that the CPU doesn’t need to access RAM. The arithmetic logic unit (ALU) executes an instruction fetched from RAM and places the results in registers or memory. The process of fetching and executing instruction after instruction is repeated as a program runs.
The main memory (RAM) for a single program can be divided into the following four major sections, as shown in Figure 4-3.
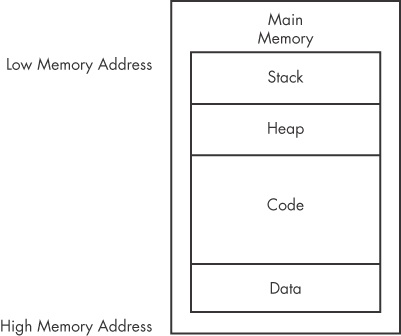
Data. This term can be used to refer to a specific section of memory called the data section, which contains values that are put in place when a program is initially loaded. These values are sometimes called static values because they may not change while the program is running, or they may be called global values because they are available to any part of the program.
Code. Code includes the instructions fetched by the CPU to execute the program’s tasks. The code controls what the program does and how the program’s tasks will be orchestrated.
Heap. The heap is used for dynamic memory during program execution, to create (allocate) new values and eliminate (free) values that the program no longer needs. The heap is referred to as dynamic memory because its contents can change frequently while the program is running.
Stack. The stack is used for local variables and parameters for functions, and to help control program flow. We will cover the stack in depth later in this chapter.
Although the diagram in Figure 4-3 shows the four major sections of memory in a particular order, these pieces may be located throughout memory. For example, there is no guarantee that the stack will be lower than the code or vice versa.
Instructions are the building blocks of assembly programs. In x86 assembly, an instruction is
made of a mnemonic and zero or more operands. As shown in
Table 4-1, the mnemonic is a word that identifies the
instruction to execute, such as mov, which moves data. Operands
are typically used to identify information used by the instruction, such as registers or
data.
Each instruction corresponds to opcodes (operation codes) that tell the CPU which operation the program wants to perform. This book and other sources use the term opcode for the entire machine instruction, although Intel technically defines it much more narrowly.
Disassemblers translate opcodes into human-readable instructions. For example, in Table 4-2, you can see that the opcodes are B9 42 00
00 00 for the instruction mov
ecx, 0x42. The value 0xB9
corresponds to mov ecx, and 0x42000000 corresponds to the value 0x42.
0x42000000 is treated as the value 0x42 because the x86 architecture uses the little-endian format. The
endianness of data describes whether the most significant
(big-endian) or least significant (little-endian) byte is
ordered first (at the smallest address) within a larger data item. Changing between endianness is
something malware must do during network communication, because network data uses big-endian and an
x86 program uses little-endian. Therefore, the IP address 127.0.0.1 will be represented as
0x7F000001 in big-endian format (over the network) and 0x0100007F in little-endian format (locally
in memory). As a malware analyst, you must be cognizant of endianness to ensure you don’t
accidentally reverse the order of important indicators like an IP address.
Operands are used to identify the data used by an instruction. Three types of operands can be used:
Immediate operands are fixed values, such as the
0x42shown in Table 4-1.Register operands refer to registers, such as
ecxin Table 4-1.Memory address operands refer to a memory address that contains the value of interest, typically denoted by a value, register, or equation between brackets, such as
[eax].
A register is a small amount of data storage available to the CPU, whose contents can be accessed more quickly than storage available elsewhere. x86 processors have a collection of registers available for use as temporary storage or workspace. Table 4-3 shows the most common x86 registers, which fall into the following four categories:
General registers are used by the CPU during execution.
Segment registers are used to track sections of memory.
Status flags are used to make decisions.
Instruction pointers are used to keep track of the next instruction to execute.
You can use Table 4-3 as a reference throughout this chapter to see how a register is categorized and broken down. The sections that follow discuss each of these register categories in depth.
Table 4-3. The x86 Registers
General registers | Segment registers | Status register | Instruction pointer |
|---|---|---|---|
EAX (AX, AH, AL) | CS | EFLAGS | EIP |
EBX (BX, BH, BL) | SS | ||
ECX (CX, CH, CL) | DS | ||
EDX (DX, DH, DL) | ES | ||
EBP (BP) | FS | ||
ESP (SP) | GS | ||
ESI (SI) |
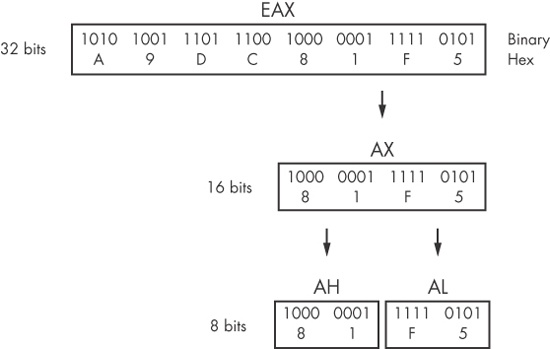
All general registers are 32 bits in size and can be referenced as either 32 or 16 bits in assembly code. For example, EDX is used to reference the full 32-bit register, and DX is used to reference the lower 16 bits of the EDX register.
Four registers (EAX, EBX, ECX, and EDX) can also be referenced as 8-bit values using the lowest 8 bits or the second set of 8 bits. For example, AL is used to reference the lowest 8 bits of the EAX register, and AH is used to reference the second set of 8 bits.
Table 4-3 lists the possible references for each general register. The EAX register breakdown is illustrated in Figure 4-4. In this example, the 32-bit (4-byte) register EAX contains the value 0xA9DC81F5, and code can reference the data inside EAX in three additional ways: AX (2 bytes) is 0x81F5, AL (1 byte) is 0xF5, and AH (1 byte) is 0x81.
The general registers typically store data or memory addresses, and are often used interchangeably to get things accomplished within the program. However, despite being called general registers, they aren’t always used that way.
Some x86 instructions use specific registers by definition. For example, the multiplication and division instructions always use EAX and EDX.
In addition to instruction definitions, general registers can be used in a consistent fashion throughout a program. The use of registers in a consistent fashion across compiled code is known as a convention. Knowledge of the conventions used by compilers allows a malware analyst to examine the code more quickly, because time isn’t wasted figuring out the context of how a register is being used. For example, the EAX generally contains the return value for function calls. Therefore, if you see the EAX register used immediately after a function call, you are probably seeing the code manipulate the return value.
The EFLAGS register is a status register. In the x86 architecture, it is 32 bits in size, and each bit is a flag. During execution, each flag is either set (1) or cleared (0) to control CPU operations or indicate the results of a CPU operation. The following flags are most important to malware analysis:
ZF. The zero flag is set when the result of an operation is equal to zero; otherwise, it is cleared.
CF. The carry flag is set when the result of an operation is too large or too small for the destination operand; otherwise, it is cleared.
SF. The sign flag is set when the result of an operation is negative or cleared when the result is positive. This flag is also set when the most significant bit is set after an arithmetic operation.
TF. The trap flag is used for debugging. The x86 processor will execute only one instruction at a time if this flag is set.
In x86 architecture, EIP, also known as the instruction pointer or program counter, is a register that contains the memory address of the next instruction to be executed for a program. EIP’s only purpose is to tell the processor what to do next.
Note
When EIP is corrupted (that is, it points to a memory address that does not contain legitimate program code), the CPU will not be able to fetch legitimate code to execute, so the program running at the time will likely crash. When you control EIP, you can control what is executed by the CPU, which is why attackers attempt to gain control of EIP through exploitation. Generally, attackers must have attack code in memory and then change EIP to point to that code to exploit a system.
The simplest and most common instruction is mov, which is
used to move data from one location to another. In other words, it’s the instruction for
reading and writing to memory. The mov instruction can move data
into registers or RAM. The format is mov
destination, source. (We use Intel syntax throughout the book, which lists
the destination operand first.)
Table 4-4 contains examples of the mov instruction. Operands surrounded by brackets are treated as memory references to
data. For example, [ebx] references the data at the memory
address EBX. The final example in Table 4-4 uses an equation to
calculate a memory address. This saves space, because it does not require separate instructions to
perform the calculation contained within the brackets. Performing calculations such as this within
an instruction is not possible unless you are calculating a memory address. For example, mov eax, ebx+esi*4 (without the
brackets) is an invalid instruction.
Table 4-4. mov Instruction Examples
Instruction | Description |
|---|---|
| Copies the contents of EBX into the EAX register |
| Copies the value 0x42 into the EAX register |
| Copies the 4 bytes at the memory location 0x4037C4 into the EAX register |
| Copies the 4 bytes at the memory location specified by the EBX register into the EAX register |
| Copies the 4 bytes at the memory location specified by the result of the
equation |
Another instruction similar to mov is lea, which means “load effective address.” The format of the
instruction is lea
destination, source. The lea instruction
is used to put a memory address into the destination. For example, lea eax,
[ebx+8] will put EBX+8 into EAX. In contrast, mov eax,
[ebx+8] loads the data at the memory address specified by EBX+8. Therefore, lea eax, [ebx+8] would be the same as mov eax, ebx+8;
however, a mov instruction like that is invalid.
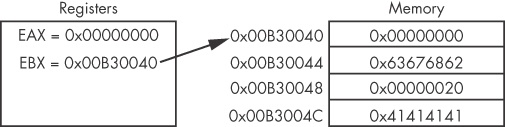
Figure 4-5 shows values for registers EAX and EBX on
the left and the information contained in memory on the right. EBX is set to 0xB30040. At address
0xB30048 is the value 0x20. The instruction mov eax, [ebx+8] places the value 0x20
(obtained from memory) into EAX, and the instruction lea eax,
[ebx+8] places the value 0xB30048 into EAX.
The lea instruction is not used exclusively to refer to
memory addresses. It is useful when calculating values, because it requires fewer instructions. For
example, it is common to see an instruction such as lea ebx,
[eax*4+4], where eax is a number, rather than a memory
address. This instruction is the functional equivalent of ebx =
(eax+1)*5, but the former is shorter or more efficient for the compiler to use instead of
a total of four instructions (for example inc eax; mov ecx, 5; mul ecx; mov ebx, eax).
x86 assembly includes many instructions for arithmetic, ranging from basic addition and subtraction to logical operators. We’ll cover the most commonly used instructions in this section.
Addition or subtraction adds or subtracts a value from a destination operand. The format of
the addition instruction is add
destination, value. The format of the subtraction instruction is sub
destination, value. The sub instruction modifies two important flags: the zero flag (ZF) and carry
flag (CF). The ZF is set if the result is zero, and CF is set if the destination is less than the
value subtracted. The inc and dec instructions increment or decrement a register by one. Table 4-5 shows examples of the addition and subtraction
instructions.
Table 4-5. Addition and Subtraction Instruction Examples
Instruction | Description |
|---|---|
| Subtracts 0x10 from EAX |
| Adds EBX to EAX and stores the result in EAX |
| Increments EDX by 1 |
| Decrements ECX by 1 |
Multiplication and division both act on a predefined register, so the command is simply
the instruction, plus the value that the register will be multiplied or divided by. The format of
the mul instruction is mul
value. Similarly, the format of div instruction is div
value. The assignment of the register on
which a mul or div instruction
acts can occur many instructions earlier, so you might need to search through a program to find
it.
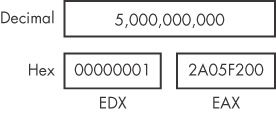
The mul
value instruction always multiplies eax by value.
Therefore, EAX must be set up appropriately before the multiplication occurs. The result is stored
as a 64-bit value across two registers: EDX and EAX. EDX stores the most significant 32 bits of the
operations, and EAX stores the least significant 32 bits. Figure 4-6 depicts the values in EDX and EAX when the
decimal result of multiplication is 5,000,000,000 and is too large to fit in a single
register.
The div
value instruction does the same thing as
mul, except in the opposite direction: It divides the 64 bits
across EDX and EAX by value. Therefore, the
EDX and EAX registers must be set up appropriately before the division occurs. The result of the
division operation is stored in EAX, and the remainder is stored in EDX.
A programmer obtains the remainder of a division operation by using an operation known as
modulo, which will be compiled into assembly through the use of the EDX
register after the div instruction (since it contains the
remainder). Table 4-6 shows examples of the mul and div instructions. The
instructions imul and idiv are
the signed versions of the mul and div instructions.
Table 4-6. Multiplication and Division Instruction Examples
Instruction | Description |
|---|---|
| Multiplies EAX by 0x50 and stores the result in EDX:EAX |
| Divides EDX:EAX by 0x75 and stores the result in EAX and the remainder in EDX |
Logical operators such as OR, AND, and XOR are used in x86 architecture. The corresponding
instructions operate similar to how add and sub operate. They perform the specified operation between the source and
destination operands and store the result in the destination. The xor instruction is frequently encountered in disassembly. For example, xor eax, eax is a quick way to set the EAX register to zero. This is done
for optimization, because this instruction requires only 2 bytes, whereas mov eax, 0 requires 5 bytes.
The shr and shl
instructions are used to shift registers. The format of the shr
instruction is shr
destination, count, and the shl
instruction has the same format. The shr and shl instructions shift the bits in the destination operand to the right
and left, respectively, by the number of bits specified in the count operand. Bits shifted beyond
the destination boundary are first shifted into the CF flag. Zero bits are filled in during the
shift. For example, if you have the binary value 1000 and shift it right by 1, the result is 0100. At the end of the shift
instruction, the CF flag contains the last bit shifted out of the destination operand.
The rotation instructions, ror and rol, are similar to the shift instructions, except the shifted bits that “fall
off” with the shift operation are rotated to the other end. In other words, during a right
rotation (ror) the least significant bits are rotated to the most
significant position. Left rotation (rol) is the exact opposite.
Table 4-7 displays examples of these
instructions.
Table 4-7. Common Logical and Shifting Arithmetic Instructions
Shifting is often used in place of multiplication as an optimization. Shifting is simpler and
faster than multiplication, because you don’t need to set up registers and move data around,
as you do for multiplication. The shl eax, 1 instruction computes
the same result as multiplying EAX by two. Shifting to the left two bit positions multiplies the
operand by four, and shifting to the left three bit positions multiplies the operand by eight.
Shifting an operand to the left n bits multiplies it by
2n.
During malware analysis, if you encounter a function containing only the instructions xor, or, and, shl, ror,
shr, or rol repeatedly and
seemingly randomly, you have probably encountered an encryption or compression function. Don’t
get bogged down trying to analyze each instruction unless you really need to do so. Instead, your
best bet in most cases is to mark this as an encryption routine and move on.
The final simple instruction, nop, does nothing. When
it’s issued, execution simply proceeds to the next instruction. The instruction nop is actually a pseudonym for xchg eax,
eax, but since exchanging EAX with itself does nothing, it is popularly referred to as NOP
(no operation).
The opcode for this instruction is 0x90. It is commonly used in a NOP sled for buffer overflow
attacks, when attackers don’t have perfect control of their exploitation. It provides
execution padding, which reduces the risk that the malicious shellcode will start executing in the
middle, and therefore malfunction. We discuss nop sleds and
shellcode in depth in Chapter 19.
Memory for functions, local variables, and flow control is stored in a stack, which is a data structure characterized by pushing and popping. You push items onto the stack, and then pop those items off. A stack is a last in, first out (LIFO) structure. For example, if you push the numbers 1, 2, and then 3 (in order), the first item to pop off will be 3, because it was the last item pushed onto the stack.
The x86 architecture has built-in support for a stack mechanism. The register support includes the ESP and EBP registers. ESP is the stack pointer and typically contains a memory address that points to the top of stack. The value of this register changes as items are pushed on and popped off the stack. EBP is the base pointer that stays consistent within a given function, so that the program can use it as a placeholder to keep track of the location of local variables and parameters.
The stack instructions include push, pop, call, leave, enter, and ret. The stack is allocated in a top-down format in memory, and the highest addresses are
allocated and used first. As values are pushed onto the stack, smaller addresses are used (this is
illustrated a bit later in Figure 4-7).
The stack is used for short-term storage only. It frequently stores local variables, parameters, and the return address. Its primary usage is for the management of data exchanged between function calls. The implementation of this management varies among compilers, but the most common convention is for local variables and parameters to be referenced relative to EBP.
Functions are portions of code within a program that perform a specific task and that are relatively independent of the remaining code. The main code calls and temporarily transfers execution to functions before returning to the main code. How the stack is utilized by a program is consistent throughout a given binary. For now, we will focus on the most common convention, known as cdecl. In Chapter 6 we will explore alternatives.
Many functions contain a prologue—a few lines of code at the start of the function. The prologue prepares the stack and registers for use within the function. In the same vein, an epilogue at the end of a function restores the stack and registers to their state before the function was called.
The following list summarizes the flow of the most common implementation for function calls. A bit later, Figure 4-8 shows a diagram of the stack layout for an individual stack frame, which clarifies the organization of stacks.
Arguments are placed on the stack using
pushinstructions.A function is called using
call memory_location. This causes the current instruction address (that is, the contents of the EIP register) to be pushed onto the stack. This address will be used to return to the main code when the function is finished. When the function begins, EIP is set tomemory_location(the start of the function).Through the use of a function prologue, space is allocated on the stack for local variables and EBP (the base pointer) is pushed onto the stack. This is done to save EBP for the calling function.
The function performs its work.
Through the use of a function epilogue, the stack is restored. ESP is adjusted to free the local variables, and EBP is restored so that the calling function can address its variables properly. The
leaveinstruction can be used as an epilogue because it sets ESP to equal EBP and pops EBP off the stack.The function returns by calling the
retinstruction. This pops the return address off the stack and into EIP, so that the program will continue executing from where the original call was made.The stack is adjusted to remove the arguments that were sent, unless they’ll be used again later.
As discussed, the stack is allocated in a top-down fashion, with the higher memory addresses used first. Figure 4-7 shows how the stack is laid out in memory. Each time a call is performed, a new stack frame is generated. A function maintains its own stack frame until it returns, at which time the caller’s stack frame is restored and execution is transferred back to the calling function.
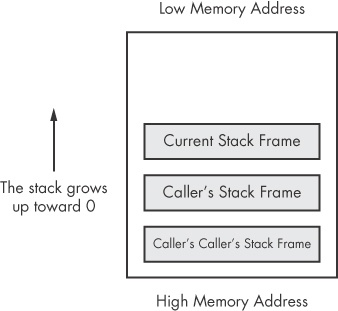
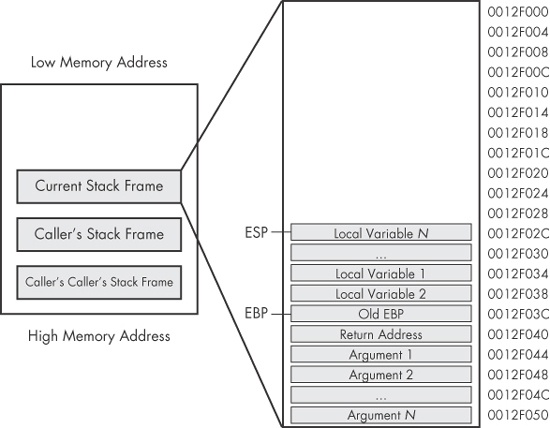
Figure 4-8 shows a dissection of one of the individual stack frames from Figure 4-7. The memory locations of individual items are also displayed. In this diagram, ESP would point to the top of the stack, which is the memory address 0x12F02C. EBP would be set to 0x12F03C throughout the duration of the function, so that the local variables and arguments can be referenced using EBP. The arguments that are pushed onto the stack before the call are shown at the bottom of the stack frame. Next, it contains the return address that is put on the stack automatically by the call instruction. The old EBP is next on the stack; this is the EBP from the caller’s stack frame.
When information is pushed onto the stack, ESP will be decreased. In the example in Figure 4-8, if the instruction push eax
were executed, ESP would be decremented by four and would contain 0x12F028, and the data contained
in EAX would be copied to 0x12F028. If the instruction pop ebx
were executed, the data at 0x12F028 would be moved into the EBX register, and then ESP would be
incremented by four.
It is possible to read data from the stack without using the push or pop instructions. For example, the instruction
mov eax, ss:[esp] will directly access the top of the stack. This
is identical to pop eax, except the ESP register is not impacted.
The convention used depends on the compiler and how the compiler is configured. (We discuss this in
more detail in Chapter 6.)
The x86 architecture provides additional instructions for popping and pushing, the most
popular of which are pusha and pushad. These instructions push all the registers onto the stack and are commonly used
with popa and popad, which pop
all the registers off the stack. The pusha and pushad functions operate as follows:
pushapushes the 16-bit registers on the stack in the following order: AX, CX, DX, BX, SP, BP, SI, DI.pushadpushes the 32-bit registers on the stack in the following order: EAX, ECX, EDX, EBX, ESP, EBP, ESI, EDI.
These instructions are typically encountered in shellcode when someone wants to save the current state of the registers to the stack so that they can be restored at a later time. Compilers rarely use these instructions, so seeing them often indicates someone hand-coded assembly and/or shellcode.
All programming languages have the ability to make comparisons and make decisions based on those comparisons. Conditionals are instructions that perform the comparison.
The two most popular conditional instructions are test and
cmp. The test instruction is
identical to the and instruction; however, the operands involved
are not modified by the instruction. The test instruction only
sets the flags. The zero flag (ZF) is typically the flag of interest after the test instruction. A
test of something against itself is often used to check for NULL values. An example of this is
test eax, eax. You could also compare EAX to zero, but test eax, eax uses fewer bytes and fewer CPU cycles.
The cmp instruction is identical to the sub instruction; however, the operands are not affected. The cmp instruction is used only to set the flags. The zero flag and carry
flag (CF) may be changed as a result of the cmp instruction.
Table 4-8 shows how the cmp
instruction impacts the flags.
A branch is a sequence of code that is conditionally executed depending on the flow of the program. The term branching is used to describe the control flow through the branches of a program.
The most popular way branching occurs is with jump instructions. An
extensive set of jump instructions is used, of which the jmp
instruction is the simplest. The format jmp
location causes the next instruction
executed to be the one specified by the jmp. This is known as an
unconditional jump, because execution will always transfer to the target
location. This simple jump will not satisfy all of your branching needs. For example, the logical
equivalent to an if statement isn’t possible with a
jmp. There is no if statement
in assembly code. This is where conditional jumps come in.
Conditional jumps use the flags to determine whether to jump or to proceed to the next instruction. More than 30 different types of conditional jumps can be used, but only a small set of them is commonly encountered. Table 4-9 shows the most common conditional jump instructions and details of how they operate. Jcc is the shorthand for generally describing conditional jumps.
Table 4-9. Conditional Jumps
Instruction | Description |
|---|---|
| Jump to specified location if ZF = 1. |
| Jump to specified location if ZF = 0. |
| Same as |
| Same as |
| Performs signed comparison jump after a |
| Performs signed comparison jump after a |
| Same as |
| Same as |
| Performs signed comparison jump after a |
| Performs signed comparison jump after a |
| Same as |
| Same as |
| Jump if the previous instruction set the overflow flag (OF = 1). |
| Jump if the sign flag is set (SF = 1). |
| Jump to location if ECX = 0. |
Rep instructions are a set of instructions for manipulating data buffers. They are usually in the form of an array of bytes, but they can also be single or double words. We will focus on arrays of bytes in this section. (Intel refers to these instructions as string instructions, but we won’t use this term to avoid confusion with the strings we discussed in Chapter 1.)
The most common data buffer manipulation instructions are movsx, cmpsx, stosx, and scasx, where
x = b,
w, or d for byte, word, or
double word, respectively. These instructions work with any type of data, but our focus in this
section will be bytes, so we will use movsb, cmpsb, and so on.
The ESI and EDI registers are used in these operations. ESI is the source index register, and EDI is the destination index register. ECX is used as the counting variable.
These instructions require a prefix to operate on data lengths greater than 1. The movsb instruction will move only a single byte and does not utilize the
ECX register.
In x86, the repeat prefixes are used for multibyte operations. The rep instruction increments the ESI and EDI offsets, and decrements the ECX
register. The rep prefix will continue until ECX = 0. The
repe/repz and repne/repnz prefixes will continue
until ECX = 0 or until the ZF = 1 or 0. This is illustrated in Table 4-10. Therefore, in most data buffer manipulation
instructions, ESI, EDI, and ECX must be properly initialized for the rep instruction to be useful.
Table 4-10. rep Instruction Termination Requirements
Instruction | Description |
|---|---|
| Repeat until ECX = 0 |
| Repeat until ECX = 0 or ZF = 0 |
| Repeat until ECX = 0 or ZF = 1 |
The movsb instruction is used to move a sequence of bytes
from one location to another. The rep prefix is commonly used
with movsb to copy a sequence of bytes, with size defined by ECX.
The rep movsb instruction is the logical equivalent of the C
memcpy function. The movsb
instruction grabs the byte at address ESI, stores it at address EDI, and then increments or
decrements the ESI and EDI registers by one according to the setting of the direction flag (DF). If
DF = 0, they are incremented; otherwise, they are decremented.
You rarely see this in compiled C code, but in shellcode, people will sometimes flip the
direction flag so they can store data in the reverse direction. If the rep prefix is present, the ECX is checked to see if it contains zero. If not, then the
instruction moves the byte from ESI to EDI and decrements the ECX register. This process repeats
until ECX = 0.
The cmpsb instruction is used to compare two sequences of
bytes to determine whether they contain the same data. The cmpsb
instruction subtracts the value at location EDI from the value at ESI and updates the flags. It is
typically used with the repe prefix. When coupled with the
repe prefix, the cmpsb
instruction compares each byte of the two sequences until it finds a difference between the
sequences or reaches the end of the comparison. The cmpsb
instruction obtains the byte at address ESI, compares the value at location EDI to set the flags,
and then increments the ESI and EDI registers by one. If the repe
prefix is present, ECX is checked and the flags are also checked, but if ECX = 0 or ZF = 0, the
operation will stop repeating. This is equivalent to the C function memcmp.
The scasb instruction is used to search for a single value
in a sequence of bytes. The value is defined by the AL register. This works in the same way as
cmpsb, but it compares the byte located at address ESI to AL,
rather than to EDI. The repe operation will continue until the
byte is found or ECX = 0. If the value is found in the sequence of bytes, ESI stores the location of
that value.
The stosb instruction is used to store values in a
location specified by EDI. This is identical to scasb, but
instead of being searched for, the specified byte is placed in the location specified by EDI. The
rep prefix is used with scasb
to initialize a buffer of memory, wherein every byte contains the same value. This is equivalent to
the C function memset. Table 4-11
displays some common rep instructions and describes their
operation.
Table 4-11. rep Instruction Examples
Instruction | Description |
|---|---|
| Used to compare two data buffers. EDI and ESI must be set to the two buffer locations, and ECX must be set to the buffer length. The comparison will continue until ECX = 0 or the buffers are not equal. |
| Used to initialize all bytes of a buffer to a certain value. EDI will
contain the buffer location, and AL must contain the initialization value. This instruction is often
seen used with |
| Typically used to copy a buffer of bytes. ESI must be set to the source buffer address, EDI must be set to the destination buffer address, and ECX must contain the length to copy. Byte-by-byte copy will continue until ECX = 0. |
| Used for searching a data buffer for a single byte. EDI must contain the address of the buffer, AL must contain the byte you are looking for, and ECX must be set to the buffer length. The comparison will continue until ECX = 0 or until the byte is found. |
Because malware is often written in C, it’s important that you know how the main method of a C program translates to assembly. This knowledge will also help you understand how offsets differ when you go from C code to assembly.
A standard C program has two arguments for the main method, typically in this form:
int main(int argc, char ** argv)
The parameters argc and argv are determined at runtime. The argc parameter is
an integer that contains the number of arguments on the command line, including the program name.
The argv parameter is a pointer to an array of strings that
contain the command-line arguments. The following example shows a command-line program and the
results of argc and argv when
the program is run.
filetestprogram.exe -r filename.txt argc = 3 argv[0] = filetestprogram.exe argv[1] = -r argv[2] = filename.txt
Example 4-1 shows the C code for a simple program.
Example 4-1. C code, main method example
int main(int argc, char* argv[])
{
if (argc != 3) {return 0;}
if (strncmp(argv[1], "-r", 2) == 0){
DeleteFileA(argv[2]);
}
return 0;
}Example 4-2 shows the C code from Example 4-1 in compiled form. This example will help you understand
how the parameters listed in Table 4-12 are accessed in assembly code. argc is compared to 3 at ❶, and argv[1] is compared to
-r at ❷ through the
use of a strncmp. Notice how argv[1] is accessed: First the location of the beginning of the array is loaded into
eax, and then 4 (the offset)
is added to eax to get argv[1]. The number 4 is used because each entry in
the argv array is an address to a string, and each address is 4
bytes in size on a 32-bit system. If -r is provided on the
command line, the code starting at ❸ will be executed,
which is when we see argv[2] accessed at offset 8 relative to argv and provided as an
argument to the DeleteFileA function.
Example 4-2. Assembly code, C main method parameters
004113CE cmp [ebp+argc], 3 ❶ 004113D2 jz short loc_4113D8 004113D4 xor eax, eax 004113D6 jmp short loc_411414 004113D8 mov esi, esp 004113DA push 2 ; MaxCount 004113DC push offset Str2 ; "-r" 004113E1 mov eax, [ebp+argv] 004113E4 mov ecx, [eax+4] 004113E7 push ecx ; Str1 004113E8 call strncmp ❷ 004113F8 test eax, eax 004113FA jnz short loc_411412 004113FC mov esi, esp ❸ 004113FE mov eax, [ebp+argv] 00411401 mov ecx, [eax+8] 00411404 push ecx ; lpFileName 00411405 call DeleteFileA
What if you encounter an instruction you have never seen before? If you can’t find your answer with a Google search, you can download the complete x86 architecture manuals from Intel at http://www.intel.com/products/processor/manuals/index.htm. This set includes the following:
Volume 1: Basic Architecture
This manual describes the architecture and programming environment. It is useful for helping you understand how memory works, including registers, memory layout, addressing, and the stack. This manual also contains details about general instruction groups.
Volume 2A: Instruction Set Reference, A–M, and Volume 2B: Instruction Set Reference, N–Z
These are the most useful manuals for the malware analyst. They alphabetize the entire instruction set and discuss every aspect of each instruction, including the format of the instruction, opcode information, and how the instruction impacts the system.
Volume 3A: System Programming Guide, Part I, and Volume 3B: System Programming Guide, Part II
In addition to general-purpose registers, x86 has many special-purpose registers and instructions that impact execution and support the OS, including debugging, memory management, protection, task management, interrupt and exception handling, multiprocessor support, and more. If you encounter special-purpose registers, refer to the System Programming Guide to see how they impact execution.
Optimization Reference Manual
This manual describes code-optimization techniques for applications. It offers additional insight into the code generated by compilers and has many good examples of how instructions can be used in unconventional ways.