
The Sweep 360-degree rotating LIDAR (https://scanse.io/download/sweep-visualizer#r) has a range of 40 meters. Compared to high-end LIDARs such as Velodyne, it is very cheap and good for research and hobby projects:

There is a good ROS interface available for this sensor. Here's the link to the Sweep sensor ROS package: https://github.com/scanse/sweep-ros. Before building the package, you need to install some dependencies:
$ sudo apt-get install ros-melodic-pcl-conversions ros-melodic-pointcloud-to-laserscan
Now, you can simply copy the sweep-ros package to your catkin workspace and build it using the catkin_make command.
After building the package, you can plug the LIDAR in to your PC through a serial-to-USB converter. If you plug this converter into a PC, Ubuntu will assign a device called /dev/ttyUSB0. First, you need to change the permission of the device using the following command:
$ sudo chmod 777 /dev/ttyUSB0
After changing the permission, we can start launching any of the launch files to view the laser's /scan point cloud data from the sensor.
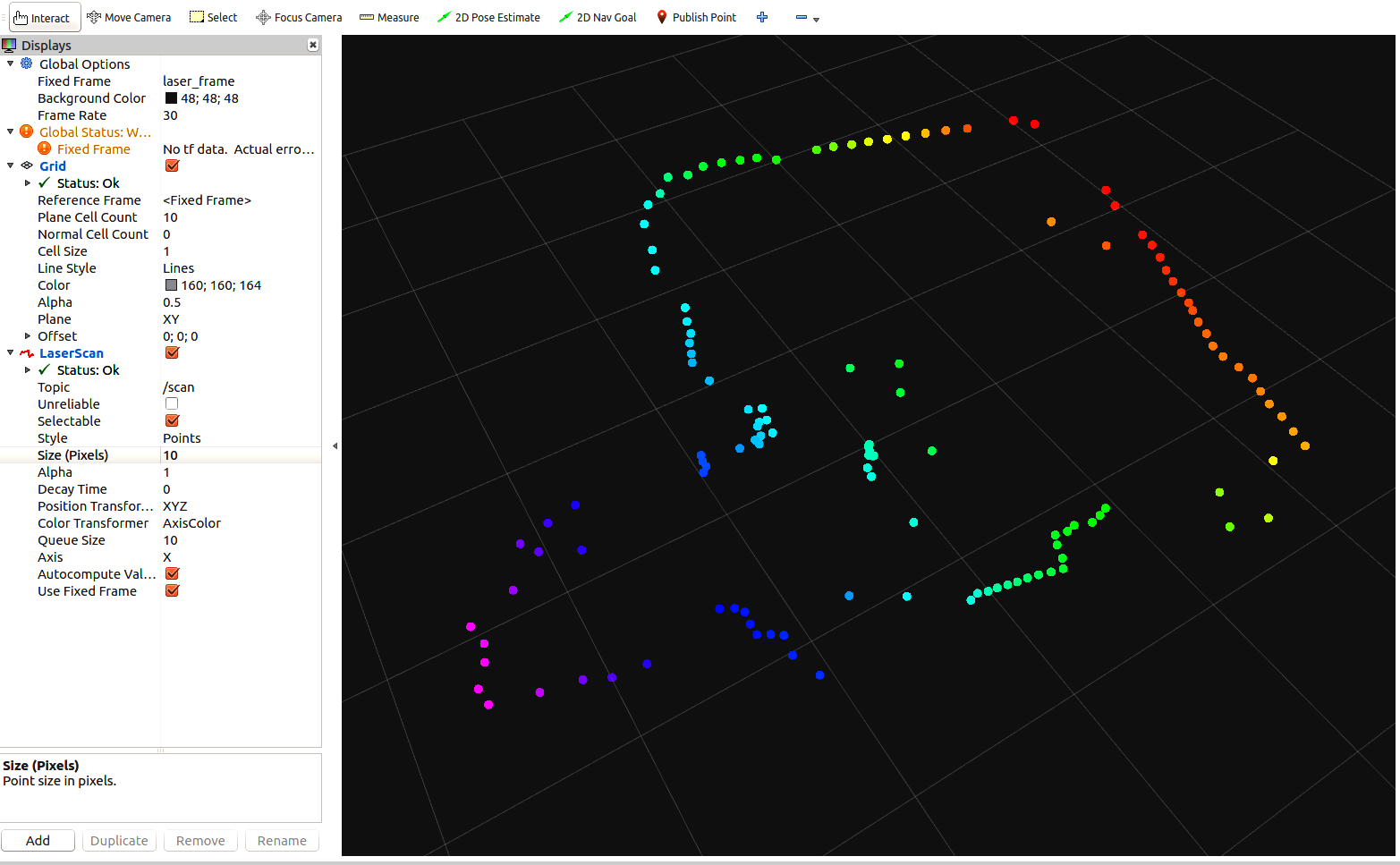
The launch file will display the laser scan in RViz:
$ roslaunch sweep_ros view_sweep_laser_scan.launch
The launch file will display the point cloud in RViz:
$ roslaunch sweep_ros view_sweep_pc2.launch
Here is the visualization of the Sweep LIDAR:
The next section will give us some insight into RPLIDAR.