
Flocking is a term applied to the behavior of birds and other flying animals that are organized into a swarm or flock.
From our point of view, it is especially interesting that flocking behavior can be simulated by applying only three rules to each particle (Boid). These rules are as follows:
We will implement the rules for flocking behavior. Perform the following steps to do so:
- Change the number of the particles, their radius, and mass.
int numParticle = 50; float radius = 5.f; float mass = 1.f;
- Add a definition for new methods and properties to the
Particleclass inside theParticle.hheader file.void flock(std::vector<Particle*>& particles); ci::Vec2f steer(ci::Vec2f target, bool slowdown); void borders(float width, float height); ci::Vec2f separate(std::vector<Particle*>& particles); ci::Vec2f align(std::vector<Particle*>& particles); ci::Vec2f cohesion(std::vector<Particle*>& particles); float maxspeed; float maxforce; ci::Vec2f vel;
- Set the default values for
maxspeedandmaxforceat the end of theParticleconstructor inside theParticle.cppsource file.this->maxspeed = 3.f; this->maxforce = 0.05f;
- Implement the new methods of the
Particleclass inside theParticle.cppsource file.void Particle::flock(std::vector<Particle*>& particles) { ci::Vec2f acc; acc += separate(particles) * 1.5f; acc += align(particles) * 1.0f; acc += cohesion(particles) * 1.0f; vel += acc; vel.limit(maxspeed); } ci::Vec2f Particle::steer(ci::Vec2f target, bool slowdown) { ci::Vec2f steer; ci::Vec2f desired = target - position; float d = desired.length(); if (d >0) { desired.normalize(); if ((slowdown) && (d <100.0)) desired *= (maxspeed*(d/100.0)); else desired *= maxspeed; steer = desired - vel; steer.limit(maxforce); } else { steer = ci::Vec2f::zero(); } return steer; } void Particle::borders(float width, float height) { if (position.x< -radius) position.x = width+radius; if (position.y< -radius) position.y = height+radius; if (position.x>width+radius) position.x = -radius; if (position.y>height+radius) position.y = -radius; } - Add a method for the separation rule.
ci::Vec2f Particle::separate(std::vector<Particle*>& particles) { ci::Vec2f resultVec = ci::Vec2f::zero(); float targetSeparation = 30.f; int count = 0; for( std::vector<Particle*>::iterator it = particles.begin(); it != particles.end(); ++it ) { ci::Vec2f diffVec = position - (*it)->position; if( diffVec.length() >0&&diffVec.length() <targetSeparation ) { resultVec += diffVec.normalized() / diffVec.length(); count++; } } if (count >0) { resultVec /= (float)count; } if (resultVec.length() >0) { resultVec.normalize(); resultVec *= maxspeed; resultVec -= vel; resultVec.limit(maxforce); } return resultVec; } - Add a method for the alignment rule.
ci::Vec2f Particle::align(std::vector<Particle*>& particles) { ci::Vec2f resultVec = ci::Vec2f::zero(); float neighborDist = 50.f; int count = 0; for( std::vector<Particle*>::iterator it = particles.begin(); it != particles.end(); ++it ) { ci::Vec2f diffVec = position - (*it)->position; if( diffVec.length() >0 && diffVec.length() <neighborDist ) { resultVec += (*it)->vel; count++; } } if (count >0) { resultVec /= (float)count; } if (resultVec.length() >0) { resultVec.normalize(); resultVec *= maxspeed; resultVec -= vel; resultVec.limit(maxforce); } return resultVec; } - Add a method for the cohesion rule.
ci::Vec2f Particle::cohesion(std::vector<Particle*>& particles) { ci::Vec2f resultVec = ci::Vec2f::zero(); float neighborDist = 50.f; int count = 0; for( std::vector<Particle*>::iterator it = particles.begin(); it != particles.end(); ++it ) { float d = position.distance( (*it)->position ); if( d >0 && d <neighborDist ) { resultVec += (*it)->position; count++; } } if (count >0) { resultVec /= (float)count; return steer(resultVec, false); } return resultVec; } - Change the
updatemethod to read as followsvoid Particle::update(){ ci::Vec2f temp = position; position += vel + forces / mass; prevPosition = temp; forces = ci::Vec2f::zero(); } - Change the
drawingmethod ofParticle, as follows:void Particle::draw(){ ci::gl::color(1.f, 1.f, 1.f); ci::gl::drawSolidCircle( position, radius ); ci::gl::color(1.f, 0.f, 0.f); ci::gl::drawLine(position, position+( position - prevPosition).normalized()*(radius+5.f) ); } - Change the
updatemethod ofParticleSysteminside theParticleSystem.cppsource file, as follows:void ParticleSystem::update(){ for( std::vector<Particle*>::iterator it = particles.begin(); it!= particles.end(); ++it ){ (*it)->flock(particles); (*it)->update(); (*it)->borders(640.f, 480.f); } }
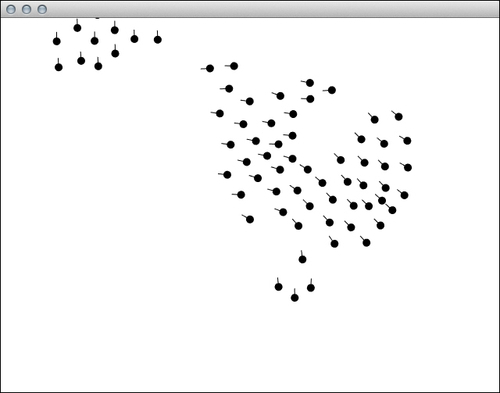
Three rules for flocking—separation, alignment, and cohesion—were implemented starting from step 4 and they were applied to each particle in step 10. In this step, we also prevented Boids from going out of the window boundaries by resetting their positions.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.