
3.7Problems and Questions
![]()
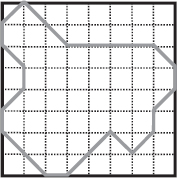
3-1Provide the chain code for the object boundary in Figure Problem 3-1, as well as the starting-point normalized chain code, and the rotation normalized chain code.
3-2*By following a boundary of an object region, a signature (tangent angle signature) can be generated by traversing the boundary and taking the angle between the tangent line and a reference line as the function of the position on the boundary. Draw thus obtained signature for a square.
3-3(1)Discuss the effect on the resulting polygon if the error threshold is set to zero in the merging method introduced in Section 3.2.4.
(2)Discuss the effect on the resulting polygon if the error threshold is set to zero in the splitting method introduced in Section 3.2.4.
3-4Under what circumstances is the representation method based on landmark points only an approximation of the object boundary?
3-5Draw the Feret box and the minimum enclosing rectangle of Figure 3.6(a).
3-6Draw the quad-tree corresponding to the result in segmenting Figure Problem 3-67 by the split-merge technique.
3-7For the point p in two images of Figure Problem 3-7, separately verify each condition in Section 3.3.5 for the skeleton algorithm. Will the point p be removed finally?

3-8Draw all the shapes of order 10 and find their shape number.
3-9*Find the shape number and the order of shape number for the object in Figure Problem 3-7.

3-10Find the Euler number for each of the images in Figure 3.32 (both 4-connected and 8-connected).
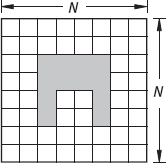
3-11Given two regions as shown in Figure Problem 3.4,

(1)Which descriptor for the boundary should be used to distinguish them?
(2)Which descriptor for the region should be used to distinguish them?
3-12Which descriptors should be used to distinguish:
(1)A square from a triangle.
(2)A square from a circle.
(3)A circle from an ellipse
3.8Further Reading
![]()
1.Classification of Representation and Description
–Specialized discussions on object representation are available in Samet (2001).
–In addition to the descriptions for boundaries and regions, descriptions on the relations of boundary and boundary, region and region, as well as boundary and region are important. Some introductions on different relation descriptors can be found in Zhang (2003b). Discussion and application on distribution among point sets can be found in Zhang (1991a).
2.Boundary-Based Representation
–More methods on boundary-based representation can be found in Otterloo (1991), Costa (2001), and Russ (2002).
3.Region-Based Representation
–Topological thinning methods can be used to obtain skeleton of regions, and even skeleton of 3-D volumes (Nikolaidis, 2001).
–More methods on region-based representation can be found in Russ (2002).
4.Transform-Based Representation
–Many transforms can be used for representation. One wavelet transform-based technique for object boundary representation can be found in Zhang (2002b).
5.Descriptors for Boundary
–Descriptors for object boundaries provide much information on the form of object, so are fundamental for shape analysis (Otterloo, 1991).
6.Descriptors for Region
–Descriptors for regions are popularly used in many applications. More descriptors can be found, for example, in Jähne (1997) and Russ (2002).