Having completed an overview of linear and multilinker algebra, we now turn our attention to topology. This is an extensive area of mathematics, and of necessity the coverage presented here is highly selective. To the uninitiated, topology can be dauntingly abstract. The best example of a topology (and the motivation for much of what follows) is the Euclidean topology on ℝm, covered briefly in Section 9.4 and preceded by preparatory material in Section 9.2 and Section 9.3. Readers new to topology might find it helpful to peruse these sections early on to get a glimpse of where the discussion below is heading.
A topology on a set X is a collection ? of subsets of X such that:
[T1] ∅ and X are in ?.
[T2] The union of any sub collection of elements of ? is in ?.
[T3] The intersection of any finite sub collection of elements of ? is in ?.
The pair (X, ?) is referred as a topological space and each element of ? is said to be an open set in ? or simply open in ?. Each element of X is called a point inX. Any open set in ? containing a given point x in X is said to be a neighborhood of x in X. We say that a subset K of X is a closed set in ? or simply closed in ? if
is an open set in X. It is often convenient to adopt the shorthand of referring to X as a topological space, with ? understood from the context. Accordingly, if U is an open set in ? and K is a closed set in ?, we say that U is an open set in X or simply open in X, and that K is a closed set in X or simply closed in X.
Let X be a topological space, and let S be a subset of X. The interior of S in X is denoted by intX (S) and defined to be the union of all open sets in X contained in S. The exterior of S in X is denoted by extX (S) and defined to be the union of all open sets in X contained in
. The boundary of S in X is denoted by bdX (S) and defined to be the set of all points in X that are neither in intX (S) nor in extX (S). Thus, X is the disjoint union
The closure of S in X is denoted by clX (S) and defined to be the intersection of all closed sets in X containing S.
Here are some of the basic facts about interiors, exteriors, boundaries, and closures.
Rather than having to deal with all open sets in X, it is often convenient to work with a smaller collection that contains the essential information on “openness”. A basis for X is a collection ℬ of subsets of X, each of which is called a basis element, such that:
[B1]X = ∪ B ∈ ℬB.
[B2] If B1, B2 are basis elements in ℬ and x is a point in B1 ∩ B2, then there is a basis element B in B containing x such that B ⊆ B1 ∩ B2.
In the notation of Theorem 9.1.4, we say that (S, ?s) is a topological subspace of (X, ?) or simply that S is a topological subspace of X.
Throughout, any subset of a topological space is viewed as a topological subspace.
Let X and Y be topological spaces, let F : X → Y be a map, and let x be a point in X. We say that F is continuous atx if for every neighborhood V of F(X) in Y, there is a neighborhood U of x in X (possibly depending on V) such that F(U) ⊆ V. Equivalently, F is continuous at x if for every neighborhood V of F(x) in Y, F−1(V) contains a neighborhood of x in X. We say that F is continuous onX or simply continuous if it is continuous at every x in X.
Let X and Y be topological spaces, let F : X → Y be a map, and let S be a subset (topological subspace) of X. We say that F is continuous onS if the restriction map F|S : S → Y is continuous on S.
Let X and Y be topological spaces, and let F : X → Y be a continuous map. We say that F is a homeomorphism, and that X and Y are homeomorphism, if F is objective and F–1 is continuous. The next result shows that a homeomorphism is a map that preserves topological structure (in much the same way that a linear isomorphism preserves linear structure).
We say that a topological space X is disconnected if there are disjoint nonempty open sets U and V in X such that X = U ∪ V. In that case, U and V are said to disconnectX. If X is not disconnected, we say it is connected. A subset S of X is said to be disconnected (connected) inX or simply disconnected (connected) if it is disconnected (connected) as a topological subspace of X. We say that a subset C of X is a connected component of X if it is a connected set in X that is maximal, in the sense that C is not properly contained in any other connected set in X.
The next result gives equivalent conditions for a subset of a topological space to be disconnected in the topological space.
Let X be a topological space, and let 풰 = {Uα : α ∈ A} be a collection of open sets in X. We say that 풰 is an open cover of X if X = Uα∈AUα. A sub collection of 풰 that is also an open cover of X is said to be a subcover of 풰. A subcover that is a finite set is called a finite subcover. We say that X is a compact topological space if every open cover of X has a finite subcover. A subset S of X is said to be a compact set in X or simply compact in X if it is compact as a topological subspace.
Let X be a topological space, and let f : X → ℝ be a function. We say that f is bounded onX or simply bounded if there is a real number c > 0 such that |f (x)| < c for all points x in X. Let S be a nonempty subset of ℝ. The element s1 in S is said to be the smallest element in S if s1 ≤ s for all s2 in S. Similarly, the element s2 in S is said to be the largest element in S if s < s2 for all s in S. If S has a smallest element s1 and a largest element s2, then s1 ≤ s ≤ s2 for all s in S. Consider the collection 풰 = {(-∞,s) ∩ S : s ∈ S} of open sets in S. If S has a largest element s2, then s2 is not in ∪s∈S(‐∞, s), so 풰 is not an open cover of S in ℝ. On the other hand, if S does not have a largest element, then 풰 is an open cover of S in ℝ.
Let X be a topological space, and let f : X → ℝ be a function. The support off is denoted by supp(f) and defined to be the closure in X of the set of points at which f is no vanishing:
Thus, supp(f) is the smallest closed set in X containing those points at which f is no vanishing. We say that f has compact support if supp(f) is compact in X. Given a subset S of X, we say that f has support in S if supp(f) ⊆ S.
9.2 Metric Spaces
Let X be a nonempty set X. A function
is said to be a distance function on X if for all x, y, z in X:
[D1] d(x, y) ≥ 0, with d(x, y) = 0 if and only if x = y.
[D2] d(x, y) = d(y, x).
[D3] d(x, y) ≤ d(x, z) + d(z, y).
(triangle inequality)
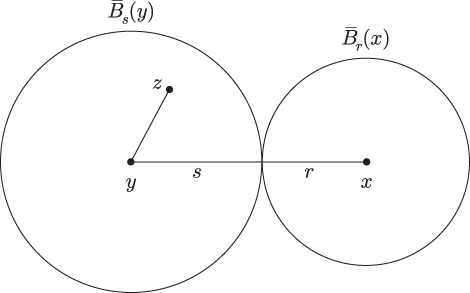
A metric space is a pair (X, d) consisting of a nonempty set X and a distance function d on X. For a given point x in X and real number r > 0, the open ball of radius r centered at x is defined by
and the closed ball of radius r centered at x by
The next result justifies our use of the terms “open” and “closed” to describe balls in a metric space.
The next result expresses continuity in metric spaces in terms familiar from the differential calculus of one real variable.
9.3 Normed Vector Spaces
Let V be a vector space. A function
is said to be a norm on V if for all vectors v, w in V and all real numbers c:
[N1] ||v|| ≥ 0, with ||v|| = 0 if and only if v = 0.
[N2] ||cv|| = ||c|||v||.
[N3] ||v + w|| ≤ ||v|| + ||w||.
(triangle equality)
A normed vector space is a pair (V, ||·||) consisting of a vector space V and a norm ||·|| on V.
Theorem 9.3.1 justifies our use of the term “norm” in Section 4.6 (and to a lesser extent its use in Section 4.1).
9.4 Euclidean Topology on ℝm
Let us put the results of Sections 9.1–9.3 to work constructing a series of “spaces” starting with the inner product space
, as defined in Example 4.6.1. We first apply Theorem 9.3.1 to (ℝm, e) and obtain a normed vector space (ℝm, ||·||), where
is the norm introduced in Example 4.6.1 and defined by
We next apply Theorem 9.3.2 to (ℝm, ||·||) and obtain a metric space (ℝm,∂ ), where
is the distance function defined by
Lastly, we apply Theorem 9.2.2 to (ℝm, ∂) and obtain a topological space (ℝm,∂).
Recall from Example 4.6.1 that e is called the Euclidean inner product. In a corresponding fashion, we refer to ||·|| as the Euclidean norm on ℝm, to d as the Euclidean distance function on ℝm, and to T as the Euclidean topology on ℝm. With the above constructions, there is now a direct path from (ℝm, e) to (ℝm, ||·||) to (ℝm, ∂) to (ℝm,
). We generally simplify notation by using ℝm to denoted any of the latter three spaces, allowing the context to make it clear whether ℝm is being thought of as a normed vector space, a metric space, or a topological space. On occasion, we also adopt ℝm as notation for (ℝm, e).
Let us discuss a few examples based on the Euclidean topologies on ℝ and ℝ2 to illustrate some of the material in Sections 9.1–9.3.
We first consider ℝ. An open (closed) “ball” in ℝ is nothing other than a finite open (closed) interval. By Theorem 9.1.3 and Theorem 9.2.2, the collection of open intervals in ℝ is a basis for the Euclidean topology of ℝ. An open set in ℝ is obtained by forming an arbitrary union of open intervals, and a closed set in ℝ results from taking the complement in ℝ of such an open set. For example, (0,1) and (0, +∞) are open in ℝ, whereas [0,1] and {0} are closed in ℝ. Working through the definitions, we find that (0,1) is the interior in ℝ of both (0,1) and [0,1], and that {0,1} is the boundary in ℝ of both (0,1) and [0,1]. Consider the functions f1, f2, f3 : ℝ → ℝ given by f1(x) = x3, f2(x) = |x|, and
Then f1 and f2 are continuous, but f3 is not. In fact, f1 is a homeomorphism.
We now turn our attention to ℝ2. The open “ball” (actually “disk”) in ℝ2 of radius ℝ centered at (x0,y0) is
For example,
is the unit open disk in ℝ2 (centered at the origin). By Theorem 9.1.3 and Theorem 9.2.2, the collection of open disks in ℝ2 is a basis for the Euclidean topology of ℝ2. An open set in ℝ2 is obtained by forming an arbitrary union of open disks, and a closed set in ℝ2 results from taking the complement in ℝ2 of such an open set. For example,
is open in ℝ2, whereas [0,1] and
are closed in ℝ2.
Suppose D, as given above, has the subspace topology induced by ℝ2. Consider the map F : D → ℝ2 (between topological spaces) defined by
It can be shown that F is a homeomorphism, with inverse F–1 : ℝ2 → D given by
Thus, D is homeomorphism to all of ℝ2. Now consider the subsets {(x, 0) : x ∈ ℝ} and {(x, |x|) : x ∈ ℝ} of ℝ2, and suppose each has the subspace topology induced by ℝ2 . It can be shown that the map
(between topological spaces) given by G(x, 0) = (x, |x|) is a homeomorphism. Thus, a “straight” line is homeomorphism to a line with a “corner”.
The next result shows that in the Euclidean setting a homeomorphism has something to say about “dimension”.
We close this section with a few remarks on compactness, perhaps the least intuitive of the concepts introduced in Section 9.1. As it stands, determining whether a subset of a topological space is compact is a seemingly complicated task. However, in the Euclidean case, matters are more straightforward. A subset S of ℝm is said to be bounded if it is contained in some open ball of finite radius.
Thus, [0,1] × [0,1] is compact in ℝ2, but (0,1) × (0,1) and ℝ × {0} are not. It should be emphasized that the preceding theorem rests on unique features of ℝm and does not extend to an arbitrary metric space.