Let (V, g, D) be an oriented Lorentz vector space, and let ε = (e1, …, em) be an orthonormal basis for V that is positively oriented with respect to D. We denote by Lm the set of linear isometries on V:
where we recall that Lin(V, V) is the vector space of linear maps from V to V.
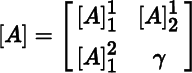
Let A be a map in Lin(V, V). For brevity, we denote
by , and likewise omit &ip.eop; from the notation for other matrices. Corresponding to (4.4.1) and (4.4.2), we have
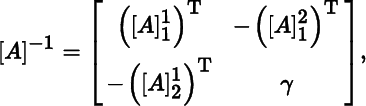
and
respectively, where
and
The ring isomorphism given by Theorem 2.2.3(b) restricts to a (multiplicative) group isomorphism between L and a subgroup of the general linear group GL(m) ⊂ Mult. In what follows, but without further mention, this group isomorphism is used to prove assertions about the group structure of L. In particular, we rely on the following: a subset of L is a subgroup if and only if the corresponding subset of GL(m) is a subgroup.
Given a map A in Lm, we have from Theorem 4.4.3 that det(A) = ± 1, and from (22.1.1) that γ ≥ 1 or γ ≤ –1. Consider the sets
and
In the present context, an orientation‐preserving (orientation‐reversing) map is said to be proper (improper).
Let us recall the convention adopted in Section 4.9 that for a given orthonormal basis (e1, …, em) for V, the future time cone T+ is defined to be the one containing the timelike unit vector em.
In view of the preceding two results, we can characterize
and
as follows:
and
In the physics literature,
is called the proper orthochronous Lorentz group onV.
Recall from Section 2.4 that the orthogonal group O(m) consists of all matrices P in Matm×m such that PTP = Im, and the special orthogonal group SO(m) is the subgroup of O(m) consisting of those matrices P such that det(P) = 1.
We say that a map A in Lin(V, V) is a rotation (with respect to &ip.eop;) if is of the form
where
is in SO(m – 1). By definition, det
so det
The set of rotations is
We say that a map A in Lin(V, V) is a boost (with respect to &ip.eop; in the (m – 1)st spacelike direction) if [A] is of the form
where
and β is computed using (22.1.2). For convenience of notation, we have defined boosts in the (m – 1)st spacelike direction, but any other spacelike direction would do. For instance, a boost in the first spacelike direction takes the form
The set of boosts is
It is clear that Bm contains the identity map. Let A′ be another boost, with
Then
where
It is easily shown that
and that
and
satisfy (22.1.2). Thus,
is a boost. This demonstrates that Bm is closed under multiplication. However,
Since the matrix on the right‐hand side is missing the necessary minus signs to make it a boost, Bm does not contain inverses (except in the case of the identity map). Thus, Bm is not a group.
Based on Theorem 22.1.5, Theorem 22.1.6, Theorem 22.1.8, and Theorem 22.1.9, Figure 22.1.1 depicts the relationships between Rm, Bm, and
as subsets of Lm, where the dot represents idV.
Recall from Section 2.4 the vector space Matm × 1 of column matrices and its basis
We make Matm × 1 into an oriented inner product space by choosing the orientation
and defining the inner product using matrix multiplication as follows: for matrices P, Q in Matm × 1, the inner product is PTQ. Endowed with this structure, we identify Matm × 1 in an obvious way with the inner product space
Rm.
We close this section by showing that any map in a proper orthochronous Lorentz group can be expressed as the composition of a rotation, followed by a boost, followed by another rotation.
22.2 Maxwell's Equations
Let (x, y, z, t) be standard coordinates on
. In what follows, we think of x, y, z as “space” variables and t as a “time” variable. Using the differential operators in Section 10.6, an electromagnetic field in
is characterized by Maxwell's equations:
where the vector fields E, B, J in d
are the electrical field, magnetic field, and current density, respectively; the function ρ in C∞
is the charge density; and the real numbers ɛ0 and μ0 are the permittivity of free space and the permeability of free space, respectively. We interpret the operators div and curl in the above identities as applying only to the space variables, and likewise for other vector calculus operators to follow. Let us assume units have been chosen so that
, where
is the speed of light. Thus, [M4] becomes
We observe that J and ρ are not independent of each other:
Then μ0∈0 = 1 gives
(22.2.1)
which is called the continuity equation.
The rest of this section is devoted to finding alternative expressions for Maxwell's equations, especially in terms of differential forms. This is an opportunity to showcase some of the computational tools developed earlier.
Let us reformulate Maxwell's equations using what are referred to as potentials. It follows from Theorem 10.6.3 and [M2] that there is a vector field A in , called the magnetic potential, such that
(22.2.2)
Then [M3] gives
hence By Theorem 10.6.2, there is a function ϕ in
called the electric potential, such that
so
(22.2.3)
Equations (22.2.2) and (22.2.3) express E and B in terms of A and ϕ. As it stands, this representation is not unique. For example, let ψ be an arbitrary function in
and let
which is referred to as a gauge transformation of A and ϕ. Then
and by Theorem 10.6.1(c),
Thus,
and
also satisfy (22.2.2) and (22.2.3). The range of potentials is limited by the constraint
(22.2.4)
called the Lorenz gauge.
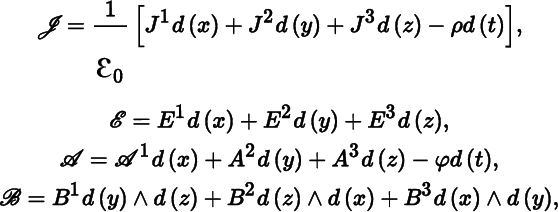
We now switch our focus from
to
and recast the preceding discussion in terms of differential forms. Let J = (J1, J2, J3), E = (E1, E2, E3), A = (A1, A2, A3), and B = (B1, B2, B3), and define corresponding covector fields, , in
*
, and forms, in Λ2
by
(22.2.6)
and
22.3 Einstein Tensor
Let (M, g) be a semi‐Riemannian manifold, and let ℛ be the Riemann curvature tensor. The Ricci curvature tensor (field) in
is defined by
(22.3.1)
the scalar curvature (function) inC∞(M) is defined by
(22.3.2)
and the Einstein tensor (field) in
defined by
In physics, the terms “Ricci curvature tensor”, “scalar curvature”, and “Einstein tensor” are typically used only when M is a Lorentz 4‐manifold, but we will continue with the more general context.
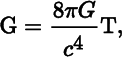
Adopting widely‐accepted units, Einstein's field equations for a Lorentz 4‐manifold are given by the tensor identity
where G is Newton's gravitational constant, c is the speed of light, and T is the so‐called stress–energy tensor. These 10 partial differential equations, which form the foundation of the general theory of relativity, describe the way gravity results from spacetime being curved by mass and energy. It is remarkable that the “left‐hand sides” of Einstein's equations are expressed entirely in geometric terms, in the sense that the Einstein tensor is completely determined by the metric of a Lorentz 4‐manifold.







 and L
m
and L
m



 called the electric potential, such that
called the electric potential, such that