
Chapter 2
Wave Transformation near Coasts
Abstract
A first part of the chapter deals with wave refraction before a coast. Effects on wave heights and wave directions are dealt with analytically for the case of straight contour lines, and the numerical approach is explained in detail for arbitrary contour lines. The second part of the chapter is devoted to the problem of shoaling and set-down (or set-up) of waves on a current. The way to calculate the current effect on wavelength and wave height is shown. A FORTRAN program is given and applied to a worked example of calculation of the Froude–Krylov force on a submerged tunnel across a strait with waves and current.
Keywords
Coast; Froude–Krylov force; Strait; Submerged tunnel; Wave-current; Wavelength; Wave height; Wave orthogonal; Wave refraction2.1. Refraction with Straight Contour Lines
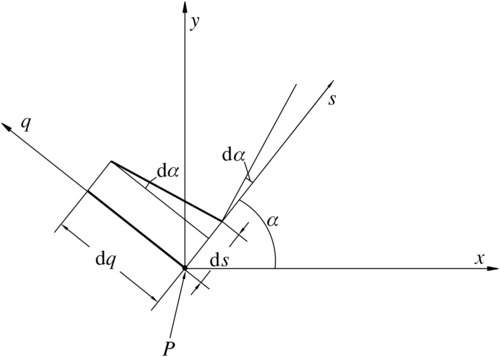
With reference to Fig. 2.1, s is the local direction of wave advance at a point P on water depth, d, and α is the angle between the wave direction and x-axis. We assume that the seabed is gently sloped so that in a neighborhood of point P, the horizontal particle velocity is
![]() (2.1)
(2.1)

The x,y component of the radiation stress tensor, that is, the x-component of the mean flux of linear momentum, per unit length, through a y-orthogonal plane is
 (2.2)
(2.2)
Here we may proceed like we have done for Φ in Section 1.9. That is, we neglect the terms of order smaller than H2, which enables us to pass

then we invert the order average with respect to time t—integral with respect to z, and we can arrive at
![]() (2.3)
(2.3)
Let us consider the control volume (CV) of Fig. 2.2 before a coast. Because of the x-parallel contour lines, the mean characteristics of the wave motion do not change with x and change only with y. Therefore, the energy equation and the x-component of the linear momentum equation when applied to the CV of Fig. 2.2 give
![]() (2.4)
(2.4)
![]() (2.5)
(2.5)
If y1 is on deep water and y2 is on water depth, d, these two equations yield
![]() (2.6)
(2.6)

![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
which enables us to obtain angle α on water depth, d, once angle α0 on deep water is known.
Referring to the basic case in which the wave travels landward, angles α0 and α range between 0 and π, and thus
![]() (2.9)
(2.9)
![]() (2.10)
(2.10)
At this stage, with cos α and sin α being known, we can operate on either (Eqn (2.6)) or (Eqn (2.7)) to obtain also H. The result is
 (2.11)
(2.11)
This equation enables us to get wave height H on water depth d, once height H0 and angle α0 on deep water are known. The ratio H/H0 for α0 = 90° is the shoaling coefficient (Cs).
Figure 2.3 shows the ratio H/H0 as a function of d/L0 for some given value of α0. (Note Eqn (2.11) gives H/H0 as a function of kd, whereas Fig. 2.3 shows H/H0 as a function of d/L0. This is possible because kd is a function of d/L0. Indeed from (Eqn (1.24)), it follows that
![]() (2.12)
(2.12)
which implies that a unique value of kd = 2πd/L exists for any given value of d/L0.) As d/L0 approaches zero, H/H0 tends to infinity. Of course, this growth of wave height is interrupted by wave breaking.
2.2. Refraction with Arbitrary Contour Lines
2.2.1. Wave Orthogonals
In the previous section, we solved the problem of the control volume extending from deep to shallow water for the basic case of straight contour lines. Here, we deal with the same problem for the case of arbitrary contour lines. To this end, it is convenient to preliminarily solve the refraction problem.
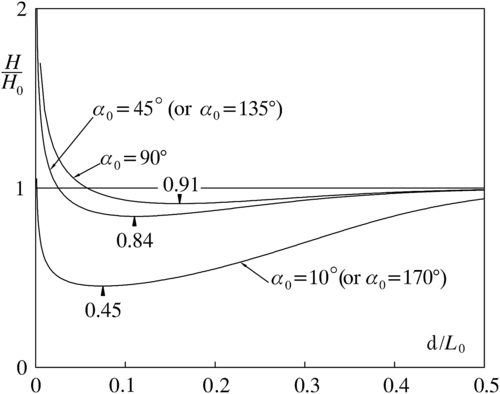
FIGURE 2.3 Variation of the wave height with the water depth for given wave direction on deep water. (Obtained by means of Eqn (2.11).)
Let us fix a point P in the horizontal plane, and let us define the natural coordinates: s with the local wave direction and q orthogonal to s. The inclination of a small stretch dq of wave front varies in a small time interval dt of
 (2.13)
(2.13)
where α and c denote, respectively, the angle of the wave front and the propagation speed at point P (see Fig. 2.4). Since
![]() (2.14)
(2.14)
(Eqn (2.13)) may by rewritten as
![]() (2.15)
(2.15)
Here, it is convenient to express  in terms of the derivatives
in terms of the derivatives  and
and  (x and y being as usual the fixed axes). Since
(x and y being as usual the fixed axes). Since
![]() (2.16)
(2.16)
it follows that
![]() (2.17)
(2.17)
Applying the chain rule, Eqn (2.17) may be rewritten in the form
![]() (2.18)
(2.18)
![]() (2.19)
(2.19)
This form of dα/ds is convenient for obtaining a wave orthogonal; that is, a curve whose tangent vector gives the local wave direction. Given angle α0 and a point x0,y0 of the orthogonal on deep water, this orthogonal is calculated with finite increments Δs through
![]() (2.20)
(2.20)
![]() (2.21)
(2.21)
![]() (2.22)
(2.22)
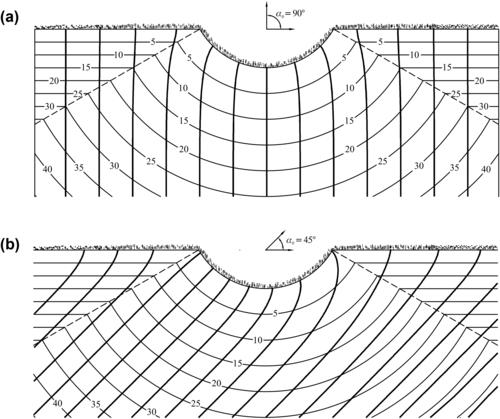
Of course, the wave orthogonal depends on the wave period. As an example, Fig. 2.5 shows some wave orthogonals before a promontory, for two distinct values of angle α0, and the same wave period.
2.2.2. Effects on the Wave Height
Let us consider a CV whose horizontal section is bounded by two adjacent wave orthogonals (2 and 3 in Fig. 2.6) and two short stretches of wave front (0 and 1 in Fig. 2.6). There is no energy flux through the two orthogonals. Hence, the mean energy flux through the stretch of wave front 0 on deep water must equal the mean energy flux through the stretch of wave front 1 on given water depth d. With Eqn (1.97) of the mean energy flux per unit length, we obtain
![]() (2.23)
(2.23)
which is reduced to
 (2.24)
(2.24)
2.3. Wave–Current Interaction in Some Straits
2.3.1. Current Only
Let us consider a marine strait. To fix our ideas, we may think of the Straits of Messina. Along the longitudinal axis, the water depth reduces to a minimum. In particular, in the Straits of Messina, the water depth is at a minimum (nearly 100 m) somewhat northerly of Messina. Often, some currents take place where the strait has its lowest depth. These currents in the Straits of Messina are due to the flow from the Ionian Sea to the Tyrrhenian Sea and vice versa.
Let us think of a strait as a straight channel of constant width, with a minimum water depth at y = 0 and with water depth tending to infinity as y → ±∞. As in the problem of shoaling-refraction, let us assume the bottom slope to approach zero.
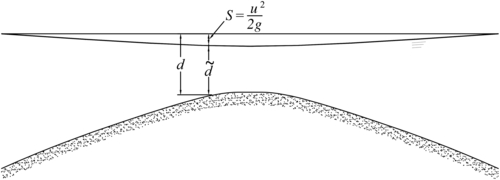
Let us analyze first the case of a current without waves, with a discharge Q per unit length. Referring to Fig. 2.7, we call
| S | the difference between the still water level and the actual water level; |
| d | the depth of the still water; |
| the water depth; and | |
| the velocity of the current. |

Under ideal flow assumptions, the Bernoulli equation implies
![]() (2.25)
(2.25)
As a consequence, u, d, and Q are related to each other by
![]() (2.26)
(2.26)
which may be rewritten in the form
![]() (2.27)
(2.27)
with
![]() (2.28)
(2.28)
![]() (2.29)
(2.29)
The lowest of these two solutions is the right one. The second solution yields d − S → 0 as Q approaches zero, and hence must be discarded.
2.3.2. Current + Waves: The Wavelength
If we multiply by d both sides of (Eqn (1.53)) and use definition (Eqn (1.26)) of L0, we may rewrite (Eqn (1.53)) in the form
![]() (2.30)
(2.30)
The bottom slope is assumed to approach zero.
![]() (2.31)
(2.31)
and where
![]() (2.32)
(2.32)
![]() (2.33)
(2.33)
with c0 ≡ L0/T and u ≠ 0.
The d/Lc satisfying (Eqn (1.47)) is equal to the positive value of x (provided that it exists) such that function
![]() (2.34)
(2.34)
is equal to function
![]() (2.35)
(2.35)
Therefore, in order to get the wavelength Lc on the current, we must seek the d/Lc such that
![]() (2.36)
(2.36)
The two functions f1(x) and f2(x) are represented in Fig. 2.8 for d/L0 = 0.2 and a few values of u/c0.
Generally, there are two values of d/Lc that satisfy Eqn (2.36). However, the solution must be the smallest one of these two, if we admit that d/Lc is a continuous function of u/c0 for given d/L0. For any given d/L0, a negative value (u/c0)crit exists for which there is a unique d/Lc satisfying (Eqn (2.36)).
2.3.3. Current + Waves: The Wave Height
A detailed derivation of the solution for the variation of the wave height along the strait is given by (Boccotti, 2000, Section 2.10). Here, we see how to apply this solution.
The input data are H0, T, and Q. The target is the wave height H on a given water depth d (d being the depth of the still water level). Let us fix a sequence of growing depths di (i = 1, …, N) with d1 = d. For each depth di, we do the following:

Step (1) to find the smallest positive solution for the equation
![]() (2.37)
(2.37)
and compute
![]() (2.38)
(2.38)
Step (2) to find the smallest positive solution ( ) of the equation
) of the equation
![]() (2.39)
(2.39)
![]() (2.40)
(2.40)
Step (3) to compute
![]() (2.41)
(2.41)
![]() (2.42)
(2.42)
![]() (2.43)
(2.43)
![]() (2.44)
(2.44)
![]() (2.45)
(2.45)
![]() (2.46)
(2.46)
![]() (2.47)
(2.47)
![]() (2.48)
(2.48)
![]() (2.49)
(2.49)
![]() (2.50)
(2.50)
![]() (2.51)
(2.51)
Step (4) to obtain the sequence Δi for i from i = N − 1 to 1 by means of
![]() (2.52)
(2.52)
where Δi represents the wave set-down (or set-up) on water depth di (dN is taken so large that ΔN may be assumed to be zero);
Step (5) to obtain the wave height H on the given water depth d by means of
![]() (2.53)
(2.53)
2.4. Worked Example
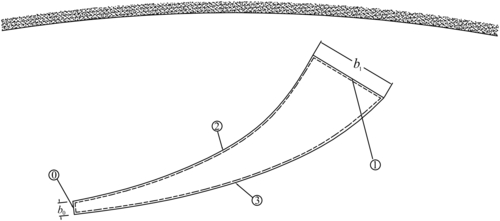
Let us imagine building a submerged tunnel across a strait—see Fig. 2.9. Let us compute the Froude–Krylov force, that is, the force on a ideal water cylinder having the same radius and being located at the same depth as the tunnel.

FIGURE 2.9 Reference scheme for the worked example of Section 2.4: evaluation of the Froude–Krylov force on a submerged tunnel loaded by waves on an adverse current.
The components of the Froude–Krylov force per unit length may be estimated as
![]() (2.54)
(2.54)
![]() (2.55)
(2.55)
Let H0 = 15 m, T = 12 s, Q = −200 m3/s/m (negative Q means that the current is adverse to the wave propagation). The still water depth, d, and the elevation ζ of the cylinder center above the seabed are, respectively, 100 and 60 m as shown in Fig. 2.9. The diameter of the cylinder is of 25 m.
The calculation is done with the following FORTRAN program.
PROGRAM CURRENT
DIMENSION AV(1000),BV(1000),DV(1000),GV(1000),FV(1000)
DIMENSION DELTAV(1000),RKCIV(1000),DSTIV(1000)
PG=3.141592
DPG=2.∗PG
DG=2.∗9.8
RO=1030.
WRITE(6,∗)'d,zitac,diam'
READ(5,∗)D,ZITAC,DIAM
ZC=D-ZITAC
.RAGG=DIAM/2.
AREA=PG∗RAGG∗RAGG
WRITE(6,∗)'H0,T'
READ(5,∗)H0,T
OM=DPG/T
WRITE(6,∗)'Q m3/s/m (positive or negative)'
READ(5,∗)Q
TOLL=1.E-6
IF(Q.EQ.0)Q=TOLL
c preliminary control
QMAX=SQRT(2.∗9.8∗D)∗D∗2./SQRT(27.)
IF(ABS(Q).GT.QMAX)STOP
N=200
DD=1
DO 100 I=1,N
c loop 100: growing water depths
DI=D+FLOAT(I-1)∗DD
DV(I)=DI
c step 1): ui
QI=SQRT(2.∗9.8∗DI)∗DI
X=1
DX=0.01
QQ=(Q/QI)∗∗2
c loop 90: smallest positive solution of Eqn (2.37)
90 X=X+DX
F1=X
F2=1.+QQ∗X∗X∗X
IF(F1.LT.F2)GO TO 90
X=X-DX
DX=DX/10.
IF(DX.GT.2.E-5)GO TO 90
UI=(Q/DI)∗X
SI=UI∗UI/DG
DSTI=DI-SI
DSTIV(I)=DSTI
c step 2):Lci (RLCI)
RL0=1.56∗T∗T
C0=RL0/T
UC0I=UI/C0
DL0I=DSTI/RL0
AI=UC0I∗UC0I/DL0I
.BI=DL0I/UC0I
DX=0.01
X=0
c loop 80: smallest solution of Eqn (2.39)
80 X=X+DX
IF(X.GT.10)THEN
WRITE(6,∗)'the wave cannot travel against the current'
STOP
ENDIF
F1=X∗TANH(DPG∗X)
F2=AI∗(X-BI)∗∗2
IF(F1.LT.F2)GO TO 80
X=X-DX
DX=DX/10.
IF(DX.GT.2.E-5)GO TO 80
RLCI=DSTI/X
RKCI=DPG/RLCI
RKCIV(I)=RKCI
c DI=di, UI=ui, SI=si, DSTI =diˆ, RLCI=lci, RKCI=kci
OI=1./(OM-UI∗RKCI)
COSA=COSH(RKCI∗DSTI)
CHI=COSA∗COSA
SHI=SINH(2.∗RKCI∗DSTI)
IF(RKCI∗DSTI.LT.10)THEN
AD1=(1./16.)∗9.8∗OI∗OI∗UI∗RKCI∗RKCI∗DSTI/CHI
AD2=(1./32.)∗9.8∗((2.∗RKCI∗DSTI+SHI)/CHI)∗OI∗(1.+UI∗RKCI∗OI)
RKI=AD1+AD2+UI/8.
ELSE
AD1=0
AD2=(1./32.)∗9.8∗2.∗OI∗(1.+UI∗RKCI∗OI)
RKI=AD1+AD2+UI/8.
ENDIF
AI=((1./16.)∗9.8∗H0∗H0/OM-0.5∗PG∗SI∗H0∗H0/T)/RKI
BI=(2.∗SI∗UI-Q)/RKI
CI=-H0∗H0/16.+0.5∗PG∗(UI/9.8)∗H0∗H0/T
DI=1./16.+(1./8.)∗9.8∗OI∗OI∗RKCI∗RKCI∗DSTI/CHI
EI=-3.∗SI
FI=CI+AI∗DI
GI=BI∗DI+EI
c store on memory the values of AI, BI, FI, GI
AV(I)=AI
BV(I)=BI
.FV(I)=FI
GV(I)=GI
100 CONTINUE
c step 4): obtain the sequence deltai from i=N-1 to i=1
I=N
DELTAV(N)=0
200 I=I-1
DI=DV(I)
DI1=DV(I+1)
DELTAI1=DELTAV(I+1)
FI=FV(I)
FI1=FV(I+1)
GI=GV(I)
GI1=GV(I+1)
c rnum = numerator, den = denominator on the RHS of Eqn (2.52)
RNUM=0.5∗(DI+DI1)∗DELTAI1-FI+FI1+GI1∗DELTAI1
DEN=GI+0.5∗(DI+DI1)
DELTAV(I)=RNUM/DEN
IF(I.EQ.1)GO TO 201
GO TO 200
201 CONTINUE
c step 5): obtain wave height H on the given water depth d
DELTA1=DELTAV(1)
A1=AV(1)
B1=BV(1)
c H proceeds from Eqn (2.53)
H=SQRT(A1+B1∗DELTA1)
c delta1 is the wave set-down (or set-up) on the given water depth d
WRITE(6,7003)DELTA1
7003 FORMAT(/,1X,'DELTA ',F7.3)
c particle acceleration of waves on current
RKCI=RKCIV(1)
DSTI=DSTIV(1)
RLCI=DPG/RKCI
ATTC=COSH(RKCI∗ZITAC)/COSH(RKCI∗DSTI)
AYC=9.8∗0.5∗H∗RKCI∗ATTC
c ay (AYC) is given by Eqn (1.54)
ATTC1=SINH(RKCI∗ZITAC)/COSH(RKCI∗DSTI)
AZC=9.8∗0.5∗H∗RKCI∗ATTC1
c Froude-Krylov force on the submerged tunnel:
FYC=RO∗AREA∗AYC/1.E3
FZC=RO∗AREA∗AZC/1.E3
c particle acceleration without the current
RL0=1.56∗T∗T
RLI1=RL0
70 RLI=RL0∗TANH(DPG∗D/RLI1)
TEST=ABS(RLI-RLI1)/RLI
RLI1=RLI
IF(TEST.GT.1.E-4)GO TO 70
RL=RLI
RK=DPG/RL
SINA=SINH(2.∗RK∗D)
TANA=TANH(RK∗D)
ARG=SINA/(TANA∗(SINA+2.∗RK∗D))
CSHO=SQRT(ARG)
c CSHO shoaling coefficient
HH=H0∗CSHO
ATT=COSH(RK∗ZITAC)/COSH(RK∗D)
AY=9.8∗0.5∗HH∗RK∗ATT
ATT1=SINH(RK∗ZITAC)/COSH(RK∗D)
AZ=9.8∗0.5∗HH∗RK∗ATT1
c Froude-Krylov force on the submerged tunnel, without the current:
FY=RO∗AREA∗AY/1.E3
FZ=RO∗AREA∗AZ/1.E3
WRITE(6,∗)
write(6,∗)' with the current without current'
WRITE(6,2000)FYC,FY
2000 FORMAT(15X,'fy',7X,F7.0,7X,F7.0)
WRITE(6,2001)FZC,FZ
2001 FORMAT(15X,'fz',7X,F7.0,7X,F7.0)
WRITE(6,2002)H,HH
2002 FORMAT(15X,'H',10X,F6.1,8X,F6.1)
WRITE(6,2003)RKCI,RK
2003 FORMAT(15X,'k',7X,F7.4,7X,F7.4)
WRITE(6,2004)ATTC,ATT
2004 FORMAT(15X,'AF(ø)',3X,F7.4,7X,F7.4)
WRITE(6,∗)
WRITE(6,∗)'(ø) AF=attenuation factor'
END
The results are
Δ = –0.030 m;
| With the Current | Without the Current | |
| fy (kN/m) | 419 | 344 |
| fz (kN/m) | 409 | 321 |
| H (m) | 19.5 | 14.8 |
| k (m−1) | 0.0363 | 0.0282 |
| AF (°) | 0.2383 | 0.3339 |
(°) AF = Depth attenuation factor.
The conclusion is that the Froude–Krylov force on the submerged tunnel grows of about the 25% because of the current. The Froude–Krylov force tends to grow for two reasons: the increase of the wave height and the increase of the wave number. On the opposite, the Froude–Krylov force tends to decrease because of the depth attenuation factor, which decreases with an adverse current.
2.5. Conclusion
Wave refraction was of central interest in the scientific literature of the years after the Second World War (Munk and Traylor, 1947; Arthur et al., 1952; Dorrestein, 1960). The effects of currents on wave direction were covered in particular by Johnson (1947), Jonsson and Wang (1980), and Gonzalez (1984). The two-dimensional problem of shoaling and set-down (or set-up) of waves and current on a sloping seabed was given an approximate solution by Jonsson et al. (1970). This solution was deeply re-examined in my book (2000), because of its potential utility for what we could call an “Engineering of the Straits.”
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.