
Chapter 9
Quasi-Determinism Theory
Mechanics of Wave Groups
Abstract
The quasi-determinism theory discloses the characteristic mechanics of wave groups in wind-generated sea states. These groups have a development stage with a spontaneous focusing of the three-dimensional envelope, being followed by a decay stage with the opposite features. The largest wave height occurs somewhat after the largest crest height, during the evolution of the wave group. Each individual wave has a life cycle, in that it is born at the group's tail and goes to die at the group's head. The theory has received some clear confirmation from small-scale field experiments. All of this is covered by this chapter, which also supplies a FORTRAN subroutine for the calculation of wave group mechanics for a given directional spectrum of the sea state.
Keywords
Homogeneous wave field; Particle accelerations; Particle velocities; Quasi-determinism theory; Small-scale field experiment; SSFE; Wave group9.1. What Does the Deterministic Wave Function Represent?
9.1.1. A Three-Dimensional Wave Group
With Eqn (7.8) of Ψ, Eqn (8.75) of the first deterministic wave function, and Eqn (8.83) of the second deterministic wave function become, respectively
 (9.1)
(9.1)
 (9.2)
(9.2)
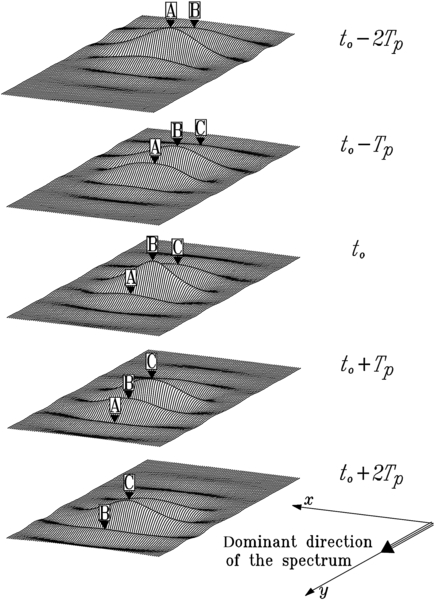
Figure 9.1 shows some pictures of the deterministic wave function (9.2). Point xo,yo of the wave of given exceptionally large height H is at the center of the framed area. The input data are: deep water; spectrum: mean JONSWAP; directional distribution: Mitsuyasu et al. with np = 20; dominant direction parallel to the y-axis. We see a three-dimensional wave group transiting xo,yo. Thus, the theory implicitly reveals the existence of a well-defined physical unit, that is, the three-dimensional wave group. The theory also reveals two basic features of this group. First, the individual waves have a propagation speed greater than the group velocity, so that each of them runs along the envelope from the tail where it is born to the head where it dies (follow wave B during its evolution). Second, the wave group has a development stage that is followed by a decay stage; in the development stage the three-dimensional envelope shrinks, so that the height of the central wave grows to a maximum.
As we may see, the answer of the theory is simple and clear. In words it says: “if you record an exceptionally large wave at a point at sea, you can expect that most probably it is the center of a well-defined group at the apex of its development.”
The wave groups are similar to the human families. Let us think of the house of Medici of Florence. Throughout the fourteenth and fifteenth century this family had a development stage up to a maximum at the age of Lorenzo the Magnificent. Then during the two following centuries the family had a progressive decay. In the four centuries from 1300 AD to 1700 AD a lot of individuals of this family were born, grew up, and died. The same is true of the waves: the group is like the family, and the individual waves are like the members of the family. The wave group at the apex of the development stage is like the house of Medici at the age of Lorenzo the Magnificent, and the wave at the center of the group at the apex of its development is like Lorenzo the Magnificent in the years of his full maturity.
The propagation speed of the wave group is nearly equal to the group velocity cG (cf. Section 1.10) associated with the period Tp, and the propagation speed of each individual wave is nearly equal to the phase speed c associated with Tp. Therefore, on deep water, the propagation speed of each individual wave is nearly twice the propagation speed of the wave group. The fact that each individual wave moves along the envelope leads to a few amazing transformations: the wave that goes to occupy the central position of the group at the apex of the development stage nearly doubles its height in a run of only one wavelength! Moreover, as an individual wave approaches the central position of the group, its wave period and wavelength reduce itself. As it leaves the central position, a compensating stretch occurs.
In Fig. 9.1 we see first the replacement of wave A by wave B at the envelope center, and then the replacement of wave B by wave C. At sea the replacement at the envelope center sometimes becomes well evident. This occurs if a large wave like A in the first image of Fig. 9.1 is spilling near the crest. Then this wave leaves the central position (second image), it gets smaller, and it sheds its whitecap. Then the next wave (B) takes the central position, and it starts spilling near the crest. Then, wave B leaves the central position, which is occupied by the next wave (C), and this wave in its turn starts spilling near the crest. In these cases the whitecap is like a crown passing from one wave to the next one.
9.1.2. The Core of the Quasi-Determinism Theory
We shall call G1 the deterministic wave group given by Eqn (9.1), and G2 the deterministic wave group given by Eqn (9.2). The sequence of pictures of G1 looks essentially like the sequence of pictures of G2.
However, there are some differences. Figure 9.2 shows these two wave groups in the time domain at point xo,yo (they represent the records that would be done by an ideal gauge at point xo,yo at the center of the framed area). The reason for this difference is the following:

A wave group yields its maximum crest elevation at a point 1 and its maximum wave height at a point 2 somewhat after point 1. At point 1 the envelope center coincides with the wave crest. Then the wave crest is reduced because it leaves the envelope center, and the following trough grows because it approaches the envelope center. At point 2 the envelope center coincides with the zero between the crest and the trough. The quasi-determinism (QD) theory says “if you record a wave crest at a fixed point xo,yo, with a given exceptionally large height b, you may expect that most probably your point xo,yo is point 1”; and “if you record a wave at a fixed point xo,yo, with a given exceptionally large height H, you may expect that most probably your point xo,yo is point 2.”
Is this the only difference between G2 and G1? It is not exactly so. We have seen that a wave group has a development stage in which the three-dimensional envelope shrinks, and a decay stage in which the three-dimensional envelope stretches. Well, wave group G1 gets the apex of its development stage at the very instant wherein the envelope center transits at point 1 (which gives a further small contribution to yield the exceptional crest elevation at point 1); whereas G2 gets the apex of its development stage at the instant wherein the envelope centre transits at point 2 (which gives a further small contribution to yield the exceptional wave height at point 2).
Thus the full response of the theory is, first: “if you record a wave crest at a fixed point xo,yo, with a given exceptionally large height b, you may expect that most probably your point xo,yo is point 1, and that the wave group has got the apex of its development at the very instant wherein the envelope center transits at point 1”; second: “if you record a wave at a fixed point xo,yo, with a given exceptionally large height H, you may expect that most probably your point xo,yo is point 2, and that the wave group has got the apex of its development at the very instant wherein the envelope center transits at point 2.” Now we can appreciate the overall consistency between Eqns (8.17) and (8.41): the first represents wave group G1 in the time domain at point xo,yo; the second represents wave group G2 in the time domain at point xo,yo.
9.2. Particle Velocity and Acceleration in Wave Groups
The deterministic velocity potential associated to wave groups (8.75) and (8.83) is given, respectively, by Eqns (8.76) and (8.84). With Eqn (7.30) of the cross-covariance,  becomes, respectively
becomes, respectively
 (9.3)
(9.3)
 (9.4)
(9.4)
Particle velocity and acceleration in the wave groups proceed on differentiating these functions  . We have:
. We have:
Wave Group G1



Wave Group G2
If the wave of the given height H very large is a zero down-crossing wave, both Eqn (9.2) of  and Eqns (9.11)–(9.16) of
and Eqns (9.11)–(9.16) of  ,
,  ,
,  ,
,  ,
,  ,
,  must be multiplied by (−1).
must be multiplied by (−1).
The knowledge of particle velocities and accelerations enables us to calculate the wave loads on cylinders of small diameter, by means of the Morison equation (as we shall see in Chapter 12). Then the knowledge of particle accelerations enables us to calculate the Froude-Krylov forces on isolated bodies. As we have already seen in Chapter 2, the Froude-Krylov force is the force acting on an ideal water body with the same volume and shape as the solid body. As such, the Froude-Krylov force is related to ax, ay, az by
![]() (9.17)
(9.17)
where W denotes the volume of the water body. Calculation of the Froude-Krylov force is a preliminary step that is necessary for calculating wave loads on large isolated bodies with an arbitrary shape. In Chapter 10 we shall see which calculation must be done for passing from the Froude-Krylov force to the actual wave force on the solid body. Then, in Chapter 13 we shall see some examples of calculations of wave loads on large isolated bodies.
Typically, we shall assume
![]() (9.18)
(9.18)
where Hmax and bmax are, respectively, the maximum expected wave height and the maximum expected crest elevation in the design sea state (Chapter 5). With Eqns (9.11)–(9.16) we shall be able to calculate the effect of the wave with the maximum expected height, and with Eqns (9.5)–(9.10) we shall be able to calculate the effect of the wave crest with the maximum expected height.
9.3. The Subroutine QD
The inputs are X, Y, z, T, and UD (if the wave of the given very large height H is a zero up-crossing → UD = 1; otherwise, UD = −1). NCALL must be 1, except for a preliminary call, as we shall see later.
The outputs are , , , , , , . The subroutine is specified for the mean JONSWAP spectrum, and the directional distribution of Mitsuyasu et al. However, for changing the spectrum or the directional distribution one has to operate on a small number of variables, which are those included between the two lines of asterisks.
The program must supply: d, Hs, H, A, θd, and np. (Alternatively, the program may give Tp in place of Hs and A. In this case one has to cancel a pair of lines from the subroutine, which serve to obtain Tp from Hs and A.)
A preliminary call of the subroutine must be done with NCALL = 0. This serves to compute the directional spectrum S(ω, θ) with steps dω, dθ suitable for the numerical integrations. The values of S(ω, θ) are stored on memory (SOT(I,J)) for the next calls of the subroutine.
The calculation is made with Eqns (9.2) and (9.11)–(9.16). All of the output variables are the result of the ratio of two integrals with respect to ω and θ. The integral in the denominator is the same for the whole set of variables and is denoted by DENOINT. The integral in the numerator is denoted ETAINT, VXINT, VYINT, etc.
Program EXAMPLE shows an easy application, with the inputs of subroutine QD being given from the console.
SUBROUTINE QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
COMMON D,HS,H,TP,TST,ALPHA, TETAD,RNP
COMMON IMAX,JMAX,OMV(300),TETV(150),RKV(300)
COMMON SOT(300,150)
DIMENSION EO(300),DTE(150)
G=9.8
G2=G∗G
PG=3.141592
DPG=2.∗PG
IF(NCALL.GT.0)GO TO 500
c∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
RK0=1.345
CHI1=3.3
CHI2=0.08
CST=0.44
c∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
COST=RK0/ALPHA∗∗0.25
TP=COST∗PG∗SQRT(HS/G)
TST=CST∗TP
ALCHI1=ALOG(CHI1)
CHI2Q=CHI2∗CHI2
OMP=DPG/TP
DOMEGA=OMP/50.
O1=0.5∗OMP
O2=3.∗OMP
OMPQ=OMP∗OMP
DTETA=PG/100.
TE1=-PG/2.
TE2=PG/2.
OM=O1-DOMEGA/2.
I=0
c Loop 90: the grid of values of the directional spectrum, being necessary
c for the execution of the double integrals, is loaded on memory
90 OM=OM+DOMEGA
IF(OM.GT.O2)GO TO 91
I=I+1
OMV(I)=OM
c values of omega stored on OMV(I) (I=1,IMAX)
PE=DPG/OM
RL0=(G/DPG)∗PE∗PE
DL0=D/RL0
IF(DL0.GT.0.5)THEN
RKV(I)=DPG/RL0
ELSE
RLP=RL0
300 RL=RL0∗TANH(DPG∗D/RLP)
TES=ABS(RL-RLP)/RL
RLP=RL
IF(TES.GT.1.E-4)GO TO 300
RKV(I)=DPG/RL
ENDIF
c k(omega) stored on RKV(I)
OMM5=1./OM∗∗5
ARG=(OM-OMP)∗∗2/(2.∗CHI2Q∗OMPQ)
E3=EXP(-ARG)
ARG=ALCHI1∗E3
E2=EXP(ARG)
ARG=1.25∗(OMP/OM)∗∗4
E1=EXP(-ARG)
EO(I)=ALPHA∗G2∗OMM5∗E1∗E2
c EO(I)=SSE(omega)
c∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
IF(OM.LE.OMP)THEN
RN=RNP∗(OM/OMP)∗∗5
ELSE
RN=RNP∗(OMP/OM)∗∗2.5
ENDIF
c∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗∗
DN=2.∗RN
TE=TE1-DTETA/2
J=0
80 TE=TE+DTETA
IF(TE.GT.TE2)GO TO 81
J=J+1
TETV(J)=TE+TETAD
c values of theta stored on TETV(J) (J=1,JMAX)
ABC=ABS(COS(TE/2.))
DTE(J)=ABC∗∗DN
GO TO 80
81 CONTINUE
JMAX=J
SOMT=0
DO J=1,JMAX
SOMT=SOMT+DTE(J)∗DTETA
ENDDO
RKN=1./SOMT
DO J=1,JMAX
DTE(J)=RKN∗DTE(J)
c DTE(J)=D(theta;omega)
SOT(I,J)=DTE(J)∗EO(I)
c directional spectrum stored on SOT(I,J)
ENDDO
GO TO 90
91 CONTINUE
IMAX=I
IF(NCALL.EQ.0)GO TO 501
500 CONTINUE
c ETAINT=double integral numerator RHS of Eqn (9.2)
c VXINT=double integral numerator RHS of Eqn (9.5)
c VYINT=double integral numerator RHS of Eqn (9.6)
c VZINT=double integral numerator RHS of Eqn (9.7)
c AXINT=double integral numerator RHS of Eqn (9.8)
c AYINT=double integral numerator RHS of Eqn (9.9)
c AZINT=double integral numerator RHS of Eqn (9.10)
ETAINT=0
VXINT=0
VYINT=0
.VZINT=0
AXINT=0
AYINT=0
AZINT=0
DENOINT=0
DO I=1,IMAX
DO J=1,JMAX
OM=OMV(I)
OM1=1./OM
RK=RKV(I)
c A1 attenuation factor of horizontal components
c A2 attenuation factor of vertical components
c for large kd both A1 and A2 tend to exp(kz). This
c asymptotic form is used (for large kd) in order to avoid
c overflow errors in cosh(kd)
IF(RK∗D.GT.20)THEN
A1=EXP(RK∗Z)
A2=A1
ELSE
A1=COSH(RK∗(D+Z))/COSH(RK∗D)
A2=SINH(RK∗(D+Z))/COSH(RK∗D)
ENDIF
TE=TETV(J)
S=SOT(I,J)
ST=SIN(TE)
CT=COS(TE)
ARG1=RK∗X∗ST+RK∗Y∗CT-OM∗T
ARG2=RK∗X∗ST+RK∗Y∗CT-OM∗(T-TST)
CO1=COS(ARG1)
CO2=COS(ARG2)
SI1=SIN(ARG1)
SI2=SIN(ARG2)
ETAINT=ETAINT+S∗(CO1-CO2)
VXINT=VXINT+S∗OM1∗RK∗A1∗ST∗(CO1-CO2)
VYINT=VYINT+S∗OM1∗RK∗A1∗CT∗(CO1-CO2)
VZINT=VZINT+S∗OM1∗RK∗A2∗(SI1-SI2)
AXINT=AXINT+S∗RK∗A1∗ST∗(SI1-SI2)
AYINT=AYINT+S∗RK∗A1∗CT∗(SI1-SI2)
AZINT=AZINT-S∗RK∗A2∗(CO1-CO2)
DENOINT=DENOINT+S∗(1.-COS(OM∗TST))
ENDDO
ENDDO
ETA=UD∗0.5∗H∗ETAINT/DENOINT
VX=UD∗0.5∗G∗H∗VXINT/DENOINT
VY=UD∗0.5∗G∗H∗VYINT/DENOINT
VZ=UD∗0.5∗G∗H∗VZINT/DENOINT
AX=UD∗0.5∗G∗H∗AXINT/DENOINT
.AY=UD∗0.5∗G∗H∗AYINT/DENOINT
AZ=UD∗0.5∗G∗H∗AZINT/DENOINT
501 CONTINUE
c the values of all the double integrals (ETAINT, VXINT,VYINT, VZINT,
c AXINT, AYINT,AZINT,DENOINT) should have been multiplied by the
c product DTETA∗DOMEGA; however this product cancels on executing
c the ratios ETAINT/DENOINT, VXINT/DENOINT, etc
RETURN
END
PROGRAM EXAMPLE
COMMON D,HS,H,TP,TST,ALPHA,TETAD,RNP
COMMON IMAX,JMAX,OMV(300),TETV(150),RKV(300)
COMMON SOT(300,150)
PG=3.141592
DPG=2.∗PG
WRITE(6,∗)'d,Hs,H'
READ(5,∗)D,HS,H
WRITE(6,∗)'alpha,thetad(degree),np'
READ(5,∗)ALPHA,TETAD,RNP
WRITE(6,∗)'zero up-crossing wave -> 1, down-crossing -> -1'
READ(5,∗)UD
TETAD=TETAD∗PG/180.
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
NCALL=NCALL+1
500 WRITE(6,∗)'X,Y,Z,T'
READ(5,∗)X,Y,Z,T
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
WRITE(6,1000)ETA
WRITE(6,1001)VX,VY,VZ
WRITE(6,1001)AX,AY,AZ
1000 FORMAT(2X,F7.2)
1001 FORMAT(2X,3(F7.2,1X))
GO TO 500
END
9.4. Experimental Verification of the Quasi-Determinism Theory: Basic Concepts
9.4.1. Obtaining the Deterministic Wave Function from Time Series Data
Let us imagine two wave gauges at two points A and B in a sea area. We measure the surface elevation at these two points in the same time instants. The sample interval is Δt, and n is the number of samples per record per gauge. We wonder “what may we expect to happen at point B provided that a wave with a given height H, being exceptionally large with respect to the sea state, occurs at point A?” According to the QD theory, point A is xo,yo and point B is xo + X,yo + Y. The expected surface elevation at xo + X,yo + Y is given by Eqn (8.83). Using the definition (7.1) of Ψ, Eqn (8.83) may be rewritten in the form
![]() (9.19)
(9.19)
where
![]() (9.20)
(9.20)
![]() (9.21)
(9.21)
and T∗ is the lag of the absolute minimum of the autocovariance
![]() (9.22)
(9.22)
The averages in Eqn (9.19) may be obtained from the time series data. As an example, let Δt = 0.1 s and n = 3001 as it is currently taken at the NOEL; then for obtaining  with T = 0.6 s we shall have to perform the following average:
with T = 0.6 s we shall have to perform the following average:
![]() (9.23)
(9.23)
where  denotes the ith sample value at point A.
denotes the ith sample value at point A.
9.4.2. Resorting to Time Series Data of Pressure Head Waves
Equation (9.19) holds also for pressure head waves at some depth beneath the water level. More generally, all that has been shown until now holds whether η is the surface elevation or the fluctuating pressure head at some fixed depth beneath the water level. Hence, one may test the theory either with surface waves or with pressure head waves, at one's own choice. Working with pressure head waves is preferable. Aside from the fact that the author attracted to pressure head waves, there is the fact that, at the NOEL, the cost of a small-scale field experiment (SSFE) on pressure head waves is an order of magnitude smaller than the cost of the same SSFE on surface waves.
9.4.3. A Typical Experiment Aimed to Verify the Theory
There is an array of gauges. The largest distance between two gauges is within a few wave lengths. These gauges record the surface elevation at the same time instants. Many records are taken in many sea states. The largest ratio H/σ is searched in each record. This is the largest value of H/σ from all the zero up-crossing waves and all the zero down-crossing waves obtained by the whole array of gauges in the record. This will be called (H/σ)max i, where i denotes the number of the record. To fix the ideas let us think of these numbers:
number of gauges: 30
record duration: 300 s
number of records: 1000
Let us imagine that the largest value of the ratio (H/σ)max i has occurred in the record i = 600 at to = 200 s, that the record was done by gauge number 25, and that the wave of this largest H/σ was a zero up-crossing wave. Then we apply Eqn (9.19) with A = point of gauge 25, and B = point of gauge 1, then B = point of gauge 2, and so on, until B = point of gauge 30. Of course, the time series data used for the averages in Eqn (9.19) will be those of record number 600. Thus, we obtain the  at the 30 points of the wave gauges, as a function of the time lag T (T typically ranges from −3Tp to 3Tp). Finally, the deterministic is compared to the random η in record number 600.
at the 30 points of the wave gauges, as a function of the time lag T (T typically ranges from −3Tp to 3Tp). Finally, the deterministic is compared to the random η in record number 600.
9.5. Results of Small-Scale Field Experiments
In an early SSFE in 1990 there were nine piles, each of which supported a wave gauge (the plan of the piles is shown in Fig. 9.3). The wave with the largest ratio H/σ was recorded at point 3. It was a zero down-crossing wave with a H/σ = 9.6.
Figure 9.4(a) shows the deterministic  calculated with Eqn (9.19), and Fig. 9.4(b) shows the random η(t) at the locations of the gauges. The relative phases at the traverse of points 1–7 reveal that the angle between the direction of wave advance (of the deterministic wave) and the y-axis was about 10°. Hence, if the center of the wave crest passed at point 3 it had to pass very close to point 9. At point 9, A is at the center of the envelope, and B is in the envelope tail. At point 3, B is at the center of the envelope, and A is in the envelope head.
calculated with Eqn (9.19), and Fig. 9.4(b) shows the random η(t) at the locations of the gauges. The relative phases at the traverse of points 1–7 reveal that the angle between the direction of wave advance (of the deterministic wave) and the y-axis was about 10°. Hence, if the center of the wave crest passed at point 3 it had to pass very close to point 9. At point 9, A is at the center of the envelope, and B is in the envelope tail. At point 3, B is at the center of the envelope, and A is in the envelope head.

(The data acquisition system had eight channels so that one of the wave gauges had to be disconnected. In the stage of the experiment wherein the largest wave height occurred, the disconnected gauge was no. 6.)

(see the plan of the gauges in Fig. 9.3). The figure compares the actual waves (b) with deterministic waves (a) when the wave with the largest H/σ was recorded (this was a zero down-crossing wave with H/σ = 9.6 recorded by gauge no. 3).
Of course, there are some differences between random η and deterministic  and indeed the QD theory states that η becomes asymptotically equal to only as H/σ tends to infinity. Besides these main discrepancies due to residual randomness, there are some discrepancies due to nonlinearity effects, which produce some local distortion of the wave profile that cannot be foreseen by the linear QD theory. However, the overall closeness between the random waves (η) and the deterministic waves () was evident since that early experiment of 1990.
and indeed the QD theory states that η becomes asymptotically equal to only as H/σ tends to infinity. Besides these main discrepancies due to residual randomness, there are some discrepancies due to nonlinearity effects, which produce some local distortion of the wave profile that cannot be foreseen by the linear QD theory. However, the overall closeness between the random waves (η) and the deterministic waves () was evident since that early experiment of 1990.
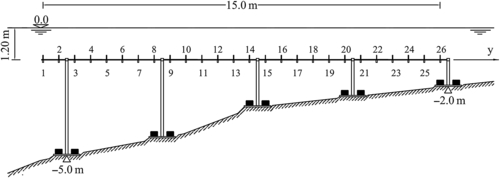
The more recent SSFEs deal with waves in the space-time domain. Besides time series at some fixed points, these experiments enable one to obtain wave profiles in the space domain. This is possible because the wave gauges are close to each other and sensibly aligned with the wave direction, as is shown in Fig. 9.5.
This novelty has made it possible to take a step forward into verification of the QD theory. Indeed, some cases were found wherein the overall closeness between random wave profiles and deterministic wave profiles is really amazing. In particular, look at Fig. 9.6, where the continuous lines represent the deterministic wave profiles and the dashed lines represent the random wave profiles, for a case of a ratio H/σ = 9.22. Figure 9.6 proves that the wave groups of the QD theory do exist in the field. The figure shows the transit of one of these groups over the gauge array (GA). In the first line of the figure (to − 5 s), on the right-hand side of the GA there is the near-calm that precedes the arrival of a wave group; on the left-hand side there is wave crest A, which is decreasing because it precedes the envelope center. On the opposite in the last line (to + 6 s), on the left-hand side of the GA there is the near-calm that follows the transit of a wave group; on the right-hand side there is wave crest E that is growing because it follows the envelope center, which has already left the GA. The envelope center is close to the locations of wave crests B, C, and D, respectively, at to − 2 s, to + 1 s, and to + 4 s. Wave crests B and C nearly complete their life cycle during the passage over the GA. In particular, wave crest B is in its growing stage from to − 4 s to to − 2 s and in the decay stage from to − 2 s to to; wave crest C is in its growing stage from to − 2 s to to + 1 s, and in the decay stage from to + 1 s to to + 2 s.
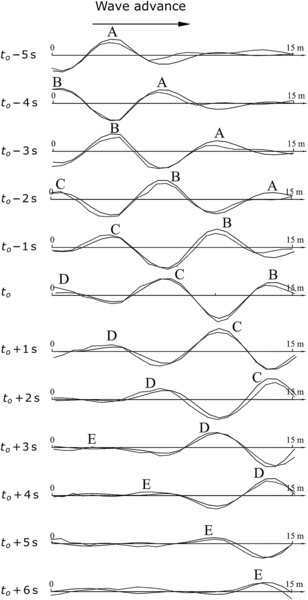
What happened when a zero down-crossing wave of H/σ = 9.22 was recorded by gauge no. 18 (the location of this gauge is shown by a small vertical segment in the picture relevant to time instant to). Dashed line: actual (random) wave. Continuous line: deterministic wave.
9.6. Conclusion
The characteristic mechanics of wave groups shown in Section 9.1.1 were disclosed in a paper by the author (1989). Only some years later than the publication of the paper (1989) the author realized the overall physical consistency of the theory, which here has been called “core of the theory” (Section 9.1.2), and was disclosed in the book (2000). The SSFEs of 1990 and 2010 were described, respectively, by Boccotti et al. (1993) and Boccotti (2011).
Two full-scale field experiments on the configuration of wave group G1 near the exceptionally large wave crest were performed by Phillips et al. (1993a,b). Some nonlinearity effects on the wave groups were dealt with by Arena (2005), Arena and Fedele (2005), Fedele and Arena (2005), Arena et al. (2008), and Arena and Guedes Soares (2009). The QD theory has widened the view on sea wave groups: from statistics to mechanics. A wave group was dealt with in the time domain and defined as a sequence of waves with heights greater than some given (large) threshold. The analysis was purely in statistics: concerning the number of waves (Kimura, 1980; van Vledder, 1992; Medina and Huspeth, 1990), or the wave energy of the group (Medina and Hudspeth, 1994).
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.