
Chapter 13
Calculation of Wave Forces on Gravity Platforms and Submerged Tunnels
Abstract
The general method of Chapter 10 for calculating the largest wave forces on large isolated bodies of arbitrary shape is applied. This method (being based on QD theory and SSFEs) is much simpler than the commonly applied methods using Green's functions, which are summarized in the conclusive notes to the chapter. The first part of the chapter deals with an estimate of the largest wave loads on a gravity offshore platform, in a design sea state. A worked example is given, and a FORTRAN program is supplied that calculates the resultant wave force as a function of time. The second part of the chapter deals with an estimate of the largest wave loads on a submerged tunnel, in a design sea state. Here too, a worked example is given and a FORTRAN program is supplied. This program gives the distributions of the wave force per unit length, at a number of time instants, during the transit of the wave group of the maximum expected wave height.
Keywords
Offshore gravity platform; Quasi-determinism theory (QD); Small-scale field experiment (SSFE); Submerged tunnel; Wave load13.1. Wave Forces on a Gravity Offshore Platform
What follows is a worked example of an estimate of the wave force on the offshore gravity platform of Fig. 13.1. The data of the design sea state and the estimate of the largest wave height in the lifetime are the same as in the worked example of Chapter 12.
13.1.1. Calculation of the Diffraction Coefficient
For calculating  of the base, we refer to the circular cylinder of the same area as the base. This has a radius of R = 45 m. Taking
of the base, we refer to the circular cylinder of the same area as the base. This has a radius of R = 45 m. Taking  = 1.75 for the platform base and = 2.00 for the columns that have an average radius of 8.5 m, with the program of Section 10.7 (with Tp = 16.5 s), we obtain
= 1.75 for the platform base and = 2.00 for the columns that have an average radius of 8.5 m, with the program of Section 10.7 (with Tp = 16.5 s), we obtain
![]()
![]()

13.1.2. Calculation of the Wave Force
The FORTRAN program PLAT for a preliminary calculation of the wave force on a gravity offshore platform is listed here below. Point xo,yo is taken at the center of the platform. The data of the geometry of the structure are read from the following file:
File PLATGEO
140.0 d
60.0 HTANK (height vertical cylinders)
110.0 HCOL (height columns)
20.0 DCYL (diameter vertical cylinders)
20.0 DCOL1 (greater diameter column)
14.0 DCOL2 (smaller diameter column)
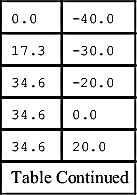
19 number of vertical cylinders
coordinates centers cylinders:
| 0.0 | −40.0 |
| 17.3 | −30.0 |
| 34.6 | −20.0 |
| 34.6 | 0.0 |
| 34.6 | 20.0 |
| Table Continued | |
| 17.3 | 30.0 |
| 0.0 | 40.0 |
| −17.3 | 30.0 |
| −34.6 | 20.0 |
| −34.6 | 0.0 |
| −34.6 | −20.0 |
| −17.3 | −30.0 |
| 0.0 | −20.0 |
| 17.3 | −10.0 |
| 17.3 | 10.0 |
| 0.0 | 20.0 |
| −17.3 | 10.0 |
| 0.0 | −10.0 |
| 0.0 | 0.0 |
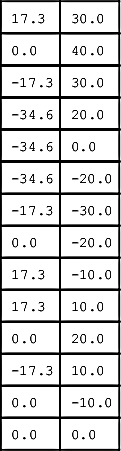
c 3 number of columns
c coordinates centers columns:
| 0.0 | −20.0 |
| 17.3 | 10.0 |
| −17.3 | 10.0 |
Loop 100 lets T range in (−1.25Tp,1.25Tp); loop 400 and loop 410 inside loop 100 compute, respectively, the force on the base and the columns, at the given T. Loop 500 inside loop 400 subdivides each of the 19 cylinders of the base into five segments of 12 m in height and computes the wave force on these segments. Loop 510 inside loop 410 subdivides the wet piece (i.e., from z = −80 m to z = η) of a column into 20 segments and computes the wave force on each of these segments. Subroutine QD is called both in the loop 500 and in the loop 510, and provides the  , which serve for computing the Froude–Krylov force.
, which serve for computing the Froude–Krylov force.
A simple way to consider the effect of the 24 interstices among the 19 cylinders of the base is multiplying the force on the 19 cylinders by the ratio (=1.065) between the volume of the base and the volume of the 19 cylinders. The program writes T / Tp, and Fx, Fy in kN.
PROGRAM PLAT
CHARACTER∗64 NOMEC
DIMENSION XCI(20),YCI(20)
DIMENSION XCO(10),YCO(10)
COMMON D,HS,H,TP,TST,ALPHA,TETAD,RNP
COMMON IMAX,JMAX,OMV(300),TETV(150),RKV(300)
COMMON SOT(300,150)
NOMEC='PLATGEO'
.OPEN(UNIT=50,STATUS='OLD',FILE=NOMEC)
READ(50,∗)D
READ(50,∗)HTANK
READ(50,∗)HCOL
READ(50,∗)DCYL
READ(50,∗)DCOL1
READ(50,∗)DCOL2
READ(50,∗)NCYL
READ(50,∗)
DO N=1,NCYL
READ(50,∗)XCI(N),YCI(N)
ENDDO
READ(50,∗)NCOL
READ(50,∗)
DO N=1,NCOL
READ(50,∗)XCO(N),YCO(N)
ENDDO
NOMEC='FORCE2'
OPEN(UNIT=60,FILE=NOMEC)
PG=3.141592
DPG=2.∗PG
WRITE(6,∗)'Hs,H'
READ(5,∗)HS,H
WRITE(6,∗)'alpha,thetad(degree),np'
READ(5,∗)ALPHA,TETAD,RNP
WRITE(6,∗)'zero up-crossing wave -> 1, down-crossing -> -1'
READ(5,∗)UD
TETAD=TETAD∗PG/180.
WRITE(6,∗)'diffraction coefficients base and columns'
READ(5,∗)CDBA,CDCO
RO=1.03E3
DTAU=0.02
NCALL=0
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
c this call of QD, with NCALL=0, serves to store the directional spectrum.
NCALL=1
DO 100 J=1,126
c Loop 100: time
TAU=−1.25+FLOAT(J-1)∗DTAU
T=TAU∗TP
c FX x-component Froude-Krylov force on the base of the platform
c FY y-component Froude-Krylov force on the base of the platform
FX=0
FY=0
DO 400 N=1,NCYL
c Loop 400: vertical cylinders of the base
R=DCYL/2
X=XCI(N)
Y=YCI(N)
DS=HTANK/10
DO 500 I=1,10
c each vertical cylinder is subdivided into 10 pieces;
c loop 500 covers these 10 pieces.
Z=-D+FLOAT(I-1)∗DS+DS/2
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
COFI=RO∗PG∗R∗R∗DS
FX=FX+COFI∗AX
FY=FY+COFI∗AY
500 CONTINUE
400 CONTINUE
c effect of the interstices among the vertical cylinders
FBX=FX∗1.065
FBY=FY∗1.065
c step from Froude-Krylov force to force on the solid body (base)
FBX=FBX∗CDBA
FBY=FBY∗CDBA
c conversion from N to kN
FBX=FBX∗1.E−3
FBY=FBY∗1.E−3
c Here the calculation of the wave force on the base has been completed.
c Now the calculation of the wave force on the columns starts
c FX x-component Froude-Krylov force on the columns
c FY y-component Froude-Krylov force on the columns
FX=0
FY=0
DO 410 N=1,NCOL
c Loop 410 columns
X=XCO(N)
Y=YCO(N)
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
HCOLW=d-HTANK
DS=(HCOLW+ETA)/20
DO 510 I=1,20
c the wet portion of a column is subdivided into 20 pieces;
c loop 510 covers these 20 pieces
ZI=FLOAT(I-1)∗DS+DS/2.
Z=-HCOLW+ZI
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
DIAM=DCOL1+(DCOL2-DCOL1)∗ZI/HCOL
R=DIAM/2
.COFI=RO∗PG∗R∗R∗DS
FX=FX+COFI∗AX
FY=FY+COFI∗AY
510 CONTINUE
410 CONTINUE
c step from Froude-Krylov force to force on the solid body (columns)
FCX=FX∗CDCO
FCY=FY∗CDCO
c conversion from N to kN
FCX=FCX∗1.E-3
FCY=FCY∗1.E-3
c Here the calculation of the wave force on the columns has been completed
c FTX is the x-component of the wave force on the whole structure
c FTY is the y-component of the wave force on the whole structure
FTX=FBX+FCX
FTY=FBY+FCY
WRITE(60,1000)TAU,FTX,FTY
WRITE(6,1000)TAU,FTX,FTY
1000 FORMAT(2X,F7.2,2X,E12.4,2X,E12.4)
100 CONTINUE
WRITE(6,∗)
WRITE(6,∗)'read results on file FORCE2'
END
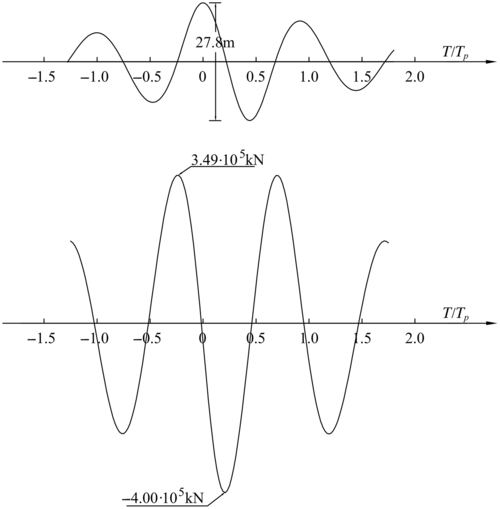
Figure 13.2 shows the horizontal force Fy on the whole structure. Since the angle θd between the dominant direction and the y-axis is zero, the wave group moves along the y-axis, so that the horizontal force proves to be parallel to the y-axis (x-component negligible).
13.2. Wave Forces on a Submerged Tunnel
What follows is a worked example of an estimate of the wave force on the submerged tunnel of Fig. 13.3, which has a length of 1000 m and is supported by five piers.
13.2.1. Wave Height and Diffraction Coefficients
Design sea state: Hs = 8 m; duration = 7 h; spectrum: mean JONSWAP, with A = 0.01; dominant direction: θd = 0 (orthogonal to the tunnel axis); directional distribution: Mitsuyasu et al. with np = 20. For the aim of a preliminary estimate, we resort to the DSSP (see Section 5.6.1). The maximum bending moment in the tunnel occurs if the center of a wave group (like that of Fig. 9.1) strikes a pier. Hence, we must calculate the maximum expected wave height at the five locations of the piers, in the design sea state. Following Section 6.2, this maximum expected wave height at five points (roughly aligned with the wave crests, and with a distance from each other, greater than Lp0/2) may be estimated as the maximum expected wave height at one point in a duration of time five times greater than the actual duration of the sea state. The conclusion turns out to be
![]()
The suggested value of for a submerged tunnel is 2.0, and with this value of and Tp of 12.1s, the FORTRAN program of Section 10.7 gives
![]()

13.2.2. Calculation of Wave Force
FORTRAN program TUNN for a preliminary calculation of the wave load on the tunnel is listed below. Loop 100 lets T range in (−1.3Tp, 1.8Tp); loop 400 computes the sectional wave force on a length of tunnel of 600 m that is, more or less, the length of the crest of a wave group at the apex of its development stage, in the design sea state.
Subroutine QD is called in the loop 400, and provides the  , which serve for computing the Froude–Krylov force. The sectional force fy and the sectional force fz are stored, respectively, on FPVY(J,N) and FPVZ(J,N), where J is associated with T, and N is associated with X. Loop 600 writes fy(X) or fz(X) in kN/m at the time instants τ = T / Tp in which these forces get a local maximum.
, which serve for computing the Froude–Krylov force. The sectional force fy and the sectional force fz are stored, respectively, on FPVY(J,N) and FPVZ(J,N), where J is associated with T, and N is associated with X. Loop 600 writes fy(X) or fz(X) in kN/m at the time instants τ = T / Tp in which these forces get a local maximum.
PROGRAM TUNN
CHARACTER∗64 NOMEC
DIMENSION FYV(300),FZV(300),TAUV(300)
DIMENSION FPYV(300,200),FPZV(300,200)
COMMON D,HS,H,TP,TST,ALPHA,TETAD,RNP
COMMON IMAX, JMAX,OMV(300),TETV(150),RKV(300)
COMMON SOT(300,150)
NOMEC='LOAD1'
OPEN(UNIT=60,FILE=NOMEC)
PG=3.141592
DPG=2.∗PG
WRITE(6,∗)'Hs,H'
READ(5,∗)HS,H
WRITE(6,∗)'alpha,thetad(degree),np'
READ(5,∗)ALPHA,TETAD,RNP
WRITE(6,∗)'zero up-crossing wave -> 1, down-crossing -> -1'
READ(5,∗)UD
TETAD=TETAD∗PG/180
WRITE(6,∗)'horizontal and vertical diffraction coefficients'
READ(5,∗)CDO,CDV
RO=1.03E3
D=125.
c DIAM diameter tunnel
c ZCE z tunnel center
c RLT length of tunnel being considered
DIAM=25
R=DIAM/2.
ZCE=−42.5
RLT=600.
DX=RLT/60.
DTAU=0.02
.NCALL=0
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
c this call of QD, with NCALL=0, serves to store the directional spectrum
NCALL=1
DO 100 J=1,156
c Loop 100:time
TAU=-1.30+FLOAT(J-1)∗DTAU
WRITE(6,5010)TAU
5010 FORMAT(2X,F7.2)
TAUV(J)=TAU
T=TAU∗TP
c FYV(J) resultant wave force (y-component) on the piece
c of tunnel being considered
c FZV(J) resultant wave force (z-component) on the piece
c of tunnel being considered
FYV(J)=0
FZV(J)=0
DO 400 N=1,61
c Loop 400:X (axis tunnel)
X=-RLT/2.+FLOAT(N-1)∗DX
Y=0
Z=ZCE
CALL QD(NCALL,UD,X,Y,Z,T,VX,VY,VZ,AX,AY,AZ,ETA)
COFI=RO∗PG∗R∗R
c FPYV(J,N) wave force per unit length (y-component)
c FPZV(J,N) wave force per unit length (z-component)
FPYV(J,N)=CDO∗RO∗PG∗R∗R∗AY
FPZV(J,N)=CDV∗RO∗PG∗R∗R∗AZ
c conversion from N to kN
FPYV(J,N)=1.E-3∗FPYV(J,N)
FPZV(J,N)=1.E-3∗FPZV(J,N)
FYV(J)=FYV(J)+FPYV(J,N)∗DX
FZV(J)=FZV(J)+FPZV(J,N)∗DX
400 CONTINUE
100 CONTINUE
DO 600 J=2,154
c Loop 600: time
c tau=TAUV(J)
c |Fy(tau-dtau)|=AFY1
c |Fy(tau)|=AFY2
c |Fy(tau+dtau)|=AFY3
AFY1=ABS(FYV(J-1))
AFY2=ABS(FYV(J))
AFY3=ABS(FYV(J+1))
IF(AFY2.GT.AFY1.AND.AFY2.GT.AFY3)THEN
c a local maximum (or minimum) of Fy has been found
WRITE(60,1000)TAUV(J)
1000 FORMAT(//,6X,'TAU = ',F7.2,4X,'(fy)',/)
DO 490 N=1,61
c Loop 490:X (axis tunnel)
X=-RLT/2.+FLOAT(N-1)∗DX
WRITE(60,1001)X,FPYV(J,N)
1001 FORMAT(2X,F6.0,2X,F6.1)
490 CONTINUE
ENDIF
c |Fz(tau-dtau)|=AFZ1
c |Fz(tau)|=AFZ2
c |Fz(tau+dtau)|=AFZ3
AFZ1=ABS(FZV(J-1))
AFZ2=ABS(FZV(J))
AFZ3=ABS(FZV(J+1))
IF(AFZ2.GT.AFZ1.AND.AFZ2.GT.AFZ3)THEN
c a local maximum (or minimum) of Fz has been found
WRITE(60,1002)TAUV(J)
1002 FORMAT(//,6X,'TAU = ',F7.2,4X,'(fz)',/)
DO 491 N=1,61
c Loop 491:X (axis tunnel)
X=-RLT/2.+FLOAT(N-1)∗DX
WRITE(60,1001)X,FPZV(J,N)
491 CONTINUE
ENDIF
600 CONTINUE
WRITE(6,∗)
WRITE(6,∗)'read results on file LOAD1'
END
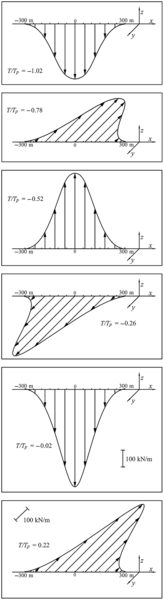
Figure 13.4 shows the local maxima of fy and fz. A local maximum of fy takes place when a zero of the wave group transits over the axis of the tunnel. A local maximum of fz takes place when a crest or a trough of the wave group transits over the axis of the tunnel.
The SSFE of 1993 at the NOEL on submerged tunnels (Boccotti, 1996) showed a slight asymmetry between positive and negative peaks of the vertical wave force. This is a nonlinearity effect being due to the kinetic term of the wave pressure. This term reduces both the wave pressure on the upper half cylinder and on the lower half. However, the reduction on the upper half is greater than the reduction on the lower half that somewhat enhances the upward (positive) wave force and reduces the downward (negative) force. The kinetic term of the wave pressure can be evaluated from the vx, vy, and vz obtained from the subroutine QD, on the cylinder surface. However, for the sake of simplicity in this example program, this term has been neglected.

13.3. Conclusion
Wave forces on large bodies under regime of wave diffraction are calculated with the use of Green's functions (John, 1949, 1950; Mei, 1989). The geometry of the structures is described with a large number of panels, which makes the program slower and requires a large PC memory (Chakrabarti, 2005). This is for a single periodic wave. If we would pass to a random sea state, that is, to a summation of harmonic wave components with different frequencies, with the need to cover some large time interval (for getting a satisfactory statistical confidence), the computational problems would become really very great. Chapter 10 eliminates these computational problems, so that the calculation of the wave force on large bodies is reduced to something simple as programs PLAT and TUNN of the present chapter. The gist of Chapter 10 is that there is a simple relationship between the deterministic force exerted by a wave group on a large body and the deterministic force that this wave group exerts on a water mass equivalent to the solid body. In the author's opinion, the progress of the models for calculation of wave load has the following sequence:
step 1 periodic, unidirectional wave,
step 2 long-crested random waves,
step 3 short-crested random waves,
step 4 deterministic mechanics of wave groups.
With “small bodies” (Chapter 12), the QD theory has enabled us to advance from step 3 to step 4; with “large bodies” (present chapter), the QD theory has enabled us to jump from step 1 to step 4.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.