References
[1] Taylor CW. Power system voltage stability. New York: McGraw-Hill; 1994.
[2] CIGRE Working Gropup 38.01. Planning against voltage collapse. Electra. 1987;111:55–75.
[3] CIGRE Task Force 38-02-10. Modeling of voltage collapse including dynamic phenomena; 1993.
[4] Yuan-Kang W. A novel algorithm for ATC calculations and applications in deregulated electricity markets. Int J Elec Power. 2007;29(10):810–821.
[5] Ajjarapu V, Lee B. Bibliography on voltage stability. IEEE Trans Power Syst. 1998;13(1):115–125.
[6] Leonardi B, Ajjarapu V. An approach for real time voltage stability margin control via reactive power reserve sensitivities. IEEE Trans Power Syst. 2013;28(2):615–625.
[7] Corsi S, Taranto GN. Voltage instability – the different shapes of the “nose”, “bulk power system dynamics and control – VII. Revitalizing operational reliability, 2007 iREP symposium; 2007. pp. 1–16.
[8] Lin L, Wang J, Gao W. Effect of load power factor on voltage stability of distribution substation. IEEE power and energy society general meeting; 2012. pp. 1–4.
[9] Okamoto H, Tanabe R, Tada Y, Sekine Y. Method for voltage stability constrained optimal power flow (VSCOPF). IEEJ Trans Power Energ. 2001;121(12):1670–1680.
[10] Glavic M, Lelic M, Novosel D, Heredia E, Kosterev DN. simple computation and visualization of voltage stability power margins in real-time, transmission and distribution conference and exposition. 2012 IEEE PES. 2012; 1–7.
[11] Mousavi OA, Bozorg M, Ahmadi-Khatir A, Cherkaoui R. Reactive power reserve management: preventive countermeasure for improving voltage stability margin. Power and energy society general meeting 2012 IEEE; 2012. pp. 1–7.
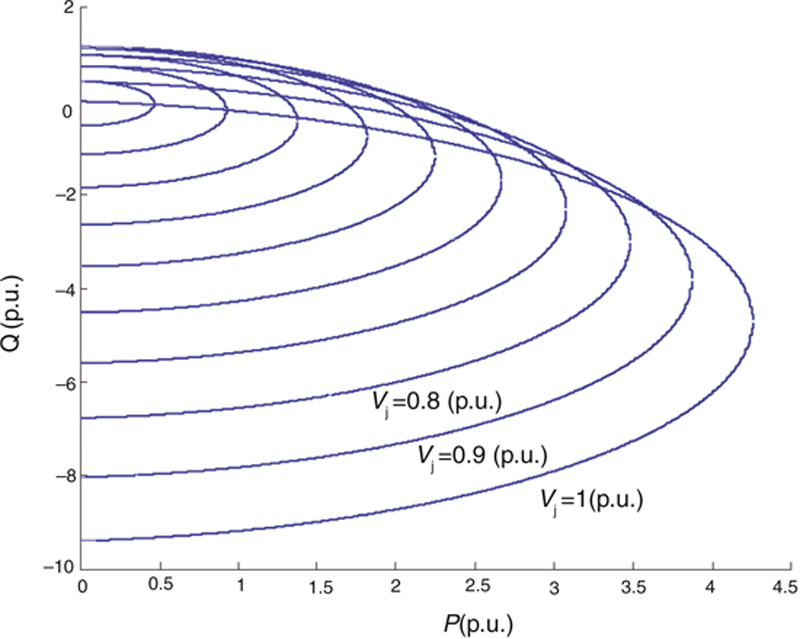
[12] Tachibana M, Palmer MD, Senjyu T, Funabashi T. Voltage stability analysis and (P,Q)–V characteristics of multibus system. CIGRE AORC technical meeting 2014; 2014.
[13] Tachibana M, Palmer MD, Matayoshi H, Senjyu T, Funabashi T. Improvement of power system voltage stability using battery energy storage systems. 2015 International conference on industrial instrumentation and control (ICIC), College of Engineering Pune, India; May 28–30, 2015.
[14] Venkatesh P, Rajendra O, Yesuraj A, Tilak M. Load flow analysis of IEEE14 bus system using MATLAB. Int J Eng Res Technol. 2013;2(5):149–155.
[15] Venkatesh B, Rost A, Chang R. Dynamic voltage collapse index – wind generator application. IEEE Trans Power Del. 2007;22(1):90–94.
[16] Panov Y, Rajagopalan J, Lee FC. Analysis and design of N paralleled DC-DC converters with master-slave current-sharing control. Applied power electronics conference and exposition, 1997. APEC ’97 conference proceedings 1997, Twelfth Annual, Feb 23–27, 1997, vol.1, 1997. pp. 436–442.
[17] Thottuvelil VJ, Verghese GC. Analysis and control design of paralleled DC/DC converters with current sharing. IEEE Trans Power Electron. 1998;13(4):635–644.
[18] Xie X, Yuan S, Zhang J, Qian Z. Analysis and design of N paralleled DC/DC modules with current-sharing control. Power electronics specialists conference, 37th IEEE, June 18–22, 2006. PESC ’06, 2006. pp. 1–4.
[19] Hou D, Liu J, Wang H, Huang W. The stability analysis and determination of multi-module distributed power electronic systems. Power Electronics for Distributed Generation Systems (PEDG), 2010 2nd IEEE international symposium, June 16–18; 2010. pp. 577–583.
[20] Liu F, Liu J, Zhang H. Comprehensive study about stability issues of multi-module distributed system. Proceedings of the 7th international power electronics conference, Hiroshima, Japan; 2014.
[21] Wang H, Liu J, Huang W. Stability prediction based on individual impedance measurement for distributed DC power systems. 2011 IEEE 8th international conference on power electronics – ECCE Asia, Jeju, Korea, May 30–June 03, 2011. pp. 2114–2120.
[22] Liu Z, Liu J, Bao W. A novel stability criterion of AC power system with constant power load. In: Proceedings of 27th annual IEEE applied power electronics conference and exposition; 2012 Orlando, FL, USA. 1946–1950.
[23] Liu Z, Liu J, Wang H. Output impedance modeling and stability criterion for parallel inverters with average load sharing scheme in AC distributed power system. In: Proceedings of 27th annual IEEE applied power electronics conference and exposition; 2012 Orlando, FL, USA. 1921–1926.
[24] Liu Z, Liu J, Zhao Y. Output impedance modeling and stability criterion for parallel inverters with master-slave sharing scheme in AC distributed power system. In: Proceedings of 27th annual IEEE applied power electronics conference and exposition; 2012 Orlando, FL, USA. 1907–1913.
[25] Middlebrook RD. Design techniques for preventing input-filter oscillations in switched-mode regulators. Proceedings of Powercon 5; 1978. pp. A3-1–A3-16.
[26] Suntio T, Leppaaho J, Huusari J, Nousiainen L. Issues on solar-generator interfacing with current-fed MPP-tracking converters. IEEE Trans Power Electron. 2010;25(9):2409–2419.
[27] Sun J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans Power Electron. 2011;26(11):3075–3078.
[28] Liu F, Liu J, Zhang B, Zhang H, Hasan SU, Zhou S. Unified stability criterion of bidirectional power flow cascade system. Applied power electronics conference and exposition (APEC), 2013 28th Annual IEEE, March 17–21; 2013. pp. 2618–2623.
[29] Liu F, Liu J, Zhang B, Zhang H, Hasan SU. General impedance/admittance stability criterion for cascade system. ECCE Asia Downunder (ECCE Asia), 2013 IEEE, June 3–6; 2013. pp. 422–428.
[30] Liu F, Liu J, Zhang H, Xue D. Generalized stability criterion for multi-module distributed DC system. J Power Electron. 2014;14(1).
[31] Liu F, Liu J, Zhang H, Xue D. Terminal admittance based stability criterion for multi-module DC distributed system. Applied power electronics conference and exposition (APEC), 29th Annual IEEE; 2014.
[32] Liu F, Liu J, Zhang H. Comprehensive study about stability issues of multi-module distributed system. In: Proceedings of 7th international power electronics conference; 2012 Hiroshima, Japan.
[33] Liu F, Liu J, Zhang H. Stability issues of Z + Z type cascade system in hybrid energy storage system (HESS). IEEE Trans Power Electron. 2014;29(11).
[34] Liu F, Liu J, Zhang B, Zhang H, Hasan SU, Zhou L. Stability issues of Z + Z or Y + Y type cascade system. Energy conversion congress and exposition (ECCE), 2013 IEEE, September 15–19; 2013. pp. 434, 441.
[35] Schwaegerl C, Tao L. Quantification of technical, economic, environmental and social benefits of microgrid operation, Chapter 7. In: Hatziargyriou N, editor. Microgrids architechtures and control. Chichester, West Sussex, UK: Wiley, IEEE Press; 2014.
[36] Gabbar H, Bower L, Pandya D, Islam F. Resilient micro energy grids with gas-power and renewable technologies, ICPERE, Bali, Indonesia; 2014.
[37] Hojo M, Ikeshita R, Yamanaka K, Ueda Y, Funabashi T. Frequency regulation in a microgrid by voltage phasor regulation of a photovoltaic generation unit, 2015 IEEJ PES – IEEE PES Thailand Joint Symposium, Thailand; 2015.
[38] Ota T, Mizuno K, Yukita K, Nakano H, Goto Y, Ichiyanagi K. Study of load frequency control for a microgrid, power engineering conference, AUPEC 2007, Australasian Universities; 2007.
[39] Sumita J, Nishioka K, Noro Y, Ito Y, Yabuki M, Kawakami N. A verification test result of isolated operation of a microgrid configured with new energy generators and a study of improvement of voltage control, IEEJ Trans, PE, vol. 129. 2009. pp. 57–65 (in Japanese).
[40] Arai J. New inverter control in an isolated microgrid composed of inverter power sources without synchronous generator, IEEE, PES, Thailand Joint Symposium; 2015.
[41] Kasem A, Zeineldin H, Kirtley J. Microgrid stability characterization subsequent to fault-triggered islanding incidents, IEEE Trans, PE, vol. 27. 2012. pp. 658–669.
[42] Noda T, Ametani A. XTAP, chapter 5. Numerical analysis of power system transients and dynamics IET; 2015.
[43] JEAC. Grid-interconnection code, JESC E0019; 2012 (in Japanese).
[44] Takano T, Kojima Y, Temma K, Simomura M. Isolated operation at Hachinohe micro-grid project. IEEJ Trans PE. 2009;129:499–506: .