6
Motion Control
6.1 Control of AC Motors
Control variables are classified into input variables (input voltage, input frequency), output variables (speed, angular displacement, torque), and internal variables (armature current, magnetic flux). The mathematical model of an a.c. motor is nonlinear, which for small variations of the input voltage, input frequency, and output speed can be linearized.
Scalar control methods are based on changing only the amplitudes of controlled variables. A typical example is to maintain constant torque (magnetic flux) of a.c. motors by keeping constant the V/f ratio. The scalar control can be implemented both in the open loop (most of industrial applications) and closed loop control systems with speed feedback.
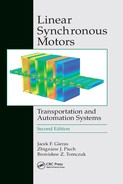
In the vector oriented control method (Fig. 6.1), both the amplitudes and phases of the space vectors of variables are changed. Vector control based upon the field orientation principle uses the analogy between the a.c. (induction or synchronous) motor and the d.c. commutator motor. The active and reactive currents are decoupled, which, in turn, determine the thrust and magnetic flux, respectively.
Standard controllers have a fixed structure and constant parameters. However, the parameters of electric motors are variable, e.g., winding resistances are temperature dependent, and winding inductances are magnetic saturation dependent. Consequently, the deterioration of the dynamic behavior of the drive can even lead to its unstability. In adaptive controllers, variable parameters or structure are adjusted to the change in parameters of the drive system.
In a self-tuning adaptive control, the controller parameters are tuned to adapt to the drive parameter variation. In a model reference adaptive control, the drive response is forced to track the response of a reference model irrespective of the drive parameter variation. This can be achieved by storing the fixed parameter reference model in the computer memory. Some model reference control methods are based on search strategy.
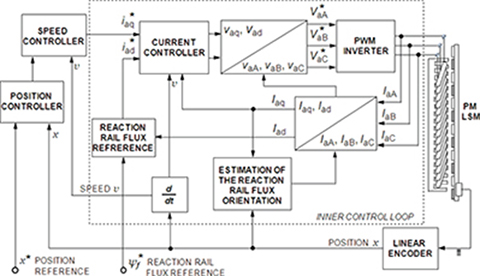
Fig. 6.1. Vector oriented control of an a.c. motor.
The sliding mode control is a variable structure control technique similar to the adaptive model reference control. In sliding mode control, the response of the drive system is insensitive to the parameter and load variations. Thus, this method is suitable for servo drives, e.g., machine tools, robots, factory automation systems, etc. The drive system is forced to “slide” along the so-called predefined trajectory in the state space by a switching control algorithm independently of change in its parameters and load.
The above classical control methods use a mathematical model of the controlled system either in the form of a transfer function or in the form of state space equations. Neural and fuzzy logic control are based on artificial intelligence and do not need any mathematical models.
Neural control applies an artificial neural network as a controller or emulator of the dynamic system. The artificial neural network is a network of artificial neurons that simulate the nervous system of the human brain. Each neuron in a single layer is connected with all neurons of the neighboring layers with the aid of so-called synapses1. The neural controller with its associative property memory can create a nonlinear relationship between its input and output values. Since there is no flux estimator, the input–output relationship has to be trained on a sufficient number of samples. The training can be performed either online or offline.
A controller that is based on fuzzy logic uses the experience and intuition of a human plant operator. The memory of a fuzzy controller creates fuzzy logic rules, e.g., if the speed of an LSM is slow, and the reference speed is fast, then set the input signal (frequency) is high. The main advantage of fuzzy control is that a strictly nonlinear or unknown system can be controlled by linguistic variables. Plants that are difficult to model using conventional parameter identification techniques can be made controllable by implementing human expert knowledge.
6.2 EMF and Thrust of PM Synchronous and Brushless Motors
6.2.1 Sine-Wave Motors
A three-phase (multiphase) armature winding with distributed parameters produces sinusoidal or quasi-sinusoidal distribution of the MMF. For a sinusoidal distribution of the air gap magnetic flux density, the first harmonic of the excitation flux can be found on the basis of eqn (3.26). The excitation magnetic flux calculated on the basis of the maximum air gap magnetic flux density Bmg is then Φf ≈ Φf1 = (2/π)LiτkfBmg, where the form factor of the excitation field kf = Bmg1/Bmg is according to eqn (3.10). Assuming that the instantaneous value of the EMF induced in a single stator conductor by the first harmonic of the magnetic flux density is ef1 = Emf1 sin(ωt) = Bmg1Livs sin(ωt) = 2fBmg1Liτ sin(ωt), the rms EMF is Emf1/√2fBmg1Liτ=(1/2)π√2f(2/π)Bmg1Liτ
Ef≈Ef1=π√2fN1kw1αikfBmgLiτ=πτ1√2N1kw1Φfυs=cEΦfυs(6.1)
where 2/π is replaced by αi and the EMF (armature) constant is
cE=πτ1√2N1kw1(6.2)
For Φf = const a new EMF constant
kE=cEΦf(6.3)
can be used. Assuming a negligible difference between the d- and q-axis synchronous reactances, i.e., Xsd ≈ Xsq, the electromagnetic (air gap) power Pelm ≈ m1EfIaq = m1EfIa cos Ψ. Note that in academic textbooks the electromagnetic power is usually calculated neglecting the armature winding resistance R1 as Pelm ≈ Pin = m1V1Ia cos ϕ = m1V1Ia cos(δ + Ψ), where cos((δ + Ψ) = Ef sin δ/(IaXsd). Putting Ef according to eqn (6.1) and vs = 2fτ, the electromagnetic thrust developed by the LSM is
Fdx=Pelmυs=m1EfIaυs=cosΨ=m1πτ1√2N1kw1ΦfIacosΨ=m12cFΦfIacosΨ(6.4)
where the thrust constant is
cF=2cE=π√2τN1kw1(6.5)
For Φf = const a new thrust constant
kF=cFΦf(6.6)
simplifies prediction of thrust-current characteristics. The maximum thrust
Fdxmax=m12cFΦfIa=m12kEIa(6.7)
is for the angle Ψ = 0°, which means that δ = ϕ (Fig. 6.2). In such a case, there is no demagnetizing component Φad of the armature reaction flux and the air gap magnetic flux density takes its maximum value. The EMF Ef is high so it can better balance the input voltage V1, thus minimizing the armature current Ia. When Ψ ≈ 00, the low armature current Ia ≈ Iaq is mainly torque producing. An angle Ψ = 00 results in a decoupling of the rotor flux Φf and the armature flux Φa.

Fig. 6.2. Phasor diagram at Iad = 0.

Fig. 6.3. IGBT inverter-fed armature circuits of PM LBMs: (a) Y-connected phase windings, (b) Δ-connected armature windings.
6.2.2 Square-Wave (Trapezoidal) Motors
PM LBMs predominantly have the reaction rail designed with surface PMs and large effective pole-arc coefficient α(sq)i=bp/τ
For a.c. synchronous motors [70],
V1=Ef+Iad(R1+jXsd)+Iaq(R1+jXsq)(6.8)
Rectangular (trapezoidal) waveforms in the armature winding of an inverter-fed LBM correspond to the operation of a d.c. commutator motor. For a d.c. motor ω → 0, then eqn (6.8) becomes
V=Ef+RI(sq)a(6.9)
where R is the sum of two-phase resistances in series (for Y-connected phase windings), and Ef is the sum of two-phase EMFs in series, V is the d.c. input voltage supplying the inverter, and I(sq)a
For an ideal rectangular distribution of Bmg = const in the interval of 0 ≤ x ≤ τ or from 0 to 180 electrical degrees
Φ(sq)f=Li∫τ0Bmgdx=τLiBmg
Including the pole shoe width bp < τ and a fringing flux, the excitation flux is somewhat smaller:
Φ(sq)f=bpLiBmg=α(sq)iτLiBmg(6.10)
For a rectangular (trapezoidal) wave excitation, the EMF induced in a single turn (two conductors) is 2BmgLiv = 4fBmgLiτ. Including bp and fringing flux, the EMF for N1kw1 turns ef=4fN1kw1α(sq)iτLiBmg=4fN1kw1Φ(sq)f
Ef=2ef=8fN1kw1α(sq)iτLiBmg=4τN1kw1Φ(sq)fυ=cEdcΦ(sq)fυ=kEdcυ(6.11)
where the EMF constants are
cEdc=4τN1kw1(6.12)
and
kEdc=cEdcΦ(sq)f(6.13)
The electromagnetic thrust developed by the LSM is expressed by the equation
Fdx=Pgυ=EfI(sq)aυ=4τN1kw1Φ(sq)f=cFdcΦ(sq)fI(sq)a=kFdcI(sq)a(6.14)
in which
cFdc=cEdc;kFdc=cFdcΦ(sq)f(6.15)
and I(sq)a
For v = vs and Ψ = 0° the ratio Fdx of a square-wave motor to Fdx of a sinewave motor is
F(sq)dxFdx=4√2πm1Φ(sq)fΦfI(sq)aIa(6.16)
For three-phase motors,
F(sq)dxFdx=4√2πm1Φ(sq)fΦfI(sq)aIa(6.17)
6.3 Model of PM Motor in dq Reference Frame
Control algorithms of sinusoidally excited synchronous motors frequently use the d-q model of synchronous machines. The d-q dynamic model is expressed in a rotating reference frame that moves at synchronous speed ω. The time-varying parameters are eliminated, and all variables are expressed in orthogonal or mutually decoupled d and q axes.
A synchronous machine is described by the following set of differential equations:
υ1d=R1iad+dψddt−wψq(6.18)
υ1q=R1iaq+dψqdt−wψd(6.19)
υf=RfIf+dψfdt(6.20)
0=RDiD+dψDdt(6.21)
0=RQiQ+dψQdt(6.22)
The linkage fluxes in the above equations are defined as
ψd=(Lad+L1)iad+LadiD+ψf=Lsdiad+LadiD+ψf(6.23)
ψd=(Laq+L1)iaq+LaqiQ=Lsqiaq+LaqiQ(6.24)
ψf=Ladiad+(Lad+Llf)ifd+LadiD(6.25)
ψD=Ladiad+(Lad+LD)iD+ψf(6.26)
ψQ=Laqiaq+(Laq+LQ)iQ(6.27)
where v1d and v1q are d- and q-axis components of terminal voltage, ψf is the maximum flux linkage per phase produced by the excitation system; R1 is the armature winding resistance; Lad, Laq are d- and q-axis components of the armature self-inductance, respectively; ω = πvs/τ is the angular frequency of the armature current; τ is the pole pitch; vs is the linear synchronous velocity; iad, iaq are the d- and q-axis components of the armature current, respectively; iD, iQ are d- and q-axis components of the damper current, respectively. The field winding resistance, which exists only in the case of electromagnetic excitation, is Rf, the field excitation current is If, the excitation linkage flux is ψf, and the field leakage inductance is Llf. The damper resistance and inductance in the d-axis are RD and LD, respectively. The damper resistance and inductance in the q-axis are RQ and LQ, respectively. The resultant armature inductances are
Lsd=Lad+L1,Lsq=Laq+L1(6.28)
where Lad and Laq are self-inductances in the d and q-axis, respectively, and L1 is the leakage inductance of the armature winding per phase. In a three-phase machine, Lad = (3/2)L′ad and Laq = (3/2)L′aq, where L′ad and L′aq are self-inductances of a single-phase machine.
The excitation linkage flux in eqn (6.25) is (Lad + Llf)ifd, while Ladiad is the armature reaction flux. In the case of a PM field excitation, the fictitious current (equivalent MMF) is If = HchM and ifd=√2If
For no damper winding, i.e., iD = iQ = 0, the voltage equations in the d-and q-axis are
υ1d=R1iad+dψddt−wψq=(R1+dLsddt)iad−wLsqiaq(6.29)
υ1q=R1iaq+dψqdt+wψd=(R1+dLsqdt)iaq+wLsdiad+wψf(6.30)
The matrix form of voltage equations in terms of inductances Lsd and Lsq is
[υ1dυ1q]=[R1+ddtLsd−wLsqwLsdR1+ddtLsq][iadiaq]+[0wψf](6.31)
For the steady-state operation (d/dt)Lsdiad = (d/dt)Lsqiaq = 0, Ia = Iad + jIaq, V1 + jV1q, iad=√2Iad,iaq=√2Iaq,v1d=√2V1d,v1q=√2V1q,Ef=ωLfdIf/√2=ωψf/√2
The instantaneous power input to the three-phase armature is
pin=υ1AiaA+υ1BiaB+υ1CiaC=32(υ1diad+υ1qiaq)(6.32)
The power balance equation is obtained from eqns (6.29) and (6.30), i.e.,
υ1diad+υ1qiaq=R1i2ad+dψddtiad+R1i2aq+dψqdtiaq+w(ψdiaq−ψqiad)(6.33)
The last term ω(ψdiaq − ψqiad) accounts for the electromagnetic power of a single-phase, two-pole synchronous machine. For a three-phase machine
pelm=32w(ψdiaq−ψqiad)=32w[(Lsdiad+ψf)iaq−Lsqiadiaq]=32w[ψf+(Lsd−Lsq)iad]iaq(6.34)
The electromagnetic thrust of a three-phase LSM is
Fdx=pelmυs=32πτ[ψf+(Lsd−Lsq)iad]iaqN(6.35)
where vs = 2fτ = ωτ/π. Compare eqn (6.35) with eqn (3.41).
The relationships between iad, iaq and phase currents iaA, iaB, and iaC are,
iad=23[iaAcoswt+iaBcos(wt+2π3)+iaCcos(wt+2π3)](6.36)
iaq=−23[iaAsinwt+iaBsin(wt−2π3)+iaCsin(wt+2π3)](6.37)
The reverse relations, obtained by simultaneous solution of eqns (6.36) and (6.37) in conjunction with iaA + iaB + iaC = 0, are
iaA=iadcoswt−iaqsinwtiaB=iadcos(wt−2π3)−iaqsin(wt−2π3)iaC=iadcos(wt+2π3)−iaqsin(wt+2π3)(6.38)
Including the zero-sequence current
i0=13(iaA+iaB+IaC)(6.39)
the relationship between dq0 and ABC currents can be written in the following matrix form:
[iadiaqi0]=23[cos(ωt)cos(ωt−2π3)cos(ωt+2π3)−sin(ωt)−sin(ωt−2π3)−sin(ωt+2π3)121212]
×[iaAiaBiaC]=[B][iaAiaBiaC](6.40)
where
[B]=23[cos(wt)cos(wt−2π3)cos(wt+2π3)−sin(wt)−sin(wt−2π3)−sin(wt+2π3)121212](6.41)
is the transformation matrix originally proposed by Blondel [57]. This is not a power invariant transformation matrix. The inverse transformation takes the form
[iaAiaBiaC]=[cos(wt)−sin(wt)1cos(wt−2π3)−sin(wt−2π3)1cos(wt+2π3)−sin(wt+2π3)1][iadiaqi0]=[B]−1[iadiaqi0](6.42)
The inverse2 of Blondel’s transformation matrix
[B]−1=[cos(wt)−sin(wt)1cos(wt−2π3)−sin(wt−2π3)1cos(wt+2π3)−sin(wt+2π3)1](6.43)
Similar equations as (6.40) and (6.42) can be written for voltages and magnetic fluxes.
The transpose3 of Blondel’s transformation matrix (6.41)
[B]T=[cos(wt)−sin(wt)12cos(wt−2π3)−sin(wt−2π3)12cos(wt+2π3)−sin(wt+2π3)12](6.44)
The power input is proportional to the sum v1AiaA + v1BiaB + v1CiaC, i.e.,
pin=υ1AiaA+υ1BiaB+υ1CiaC=[υ1Aυ1Bυ1C][iaAiaBiaC](6.45)
Putting v1A, v1B, v1C and iaA, iaB, iaC from eqn (6.42), the power is
pin=32(υ1diad+υ1qiaq+2υ0i0)=[υ1d υ1q 2υ0][iadiaqi0](6.46)
According to Park [165], the proportionality coefficient must be 3/2 for any instant during normal operation at unity power factor.
6.4 Thrust and Speed Control of PM Motors
Thrust-speed envelopes of PM LSMs are classified into two categories: constant thrust (Fig. 6.4a) and constant power (Fig. 6.4b).
For constant thrust requirements, the thrust-speed envelope is of a rectangular shape. The maximum thrust Fxmax should be obtained at all linear speeds up to the speed vb. Such envelope is required for linear servo drives and actuators.
For constant power requirements, the thrust-speed envelope is of a hyperbolic shape because Fxv = Pout = const. The constant power trajectory is maintained over a wide speed range from the base speed vb to the maximum speed vmax. Such envelope is required for traction linear motors that are used in, e.g., linear-motor-driven vehicles. A constant power operation is implemented by weakening the excitation flux. Since PM motors do not have field excitation windings, the magnetic flux is weakened by applying appropriate control techniques. It can also be done by a hardware, i.e., using a hybrid excitation system that consists of PMs and additional excitation coils placed around PMs.

Fig. 6.4. Thrust-speed envelopes of LSMs: (a) constant thrust, (b) constant power.
Control algorithms are, in prinicple, similar for both sine-wave and square-wave PM motors. Fig. 6.5 shows how control loops can be developed to achieve thrust, speed and position control in motion control systems with PM LSMs. These cascaded control structures (Fig. 6.5) for LSMs have been based on control structures for rotary PM synchronous motors [98].
The following are some examples of control of PM LSMs and LBMs.
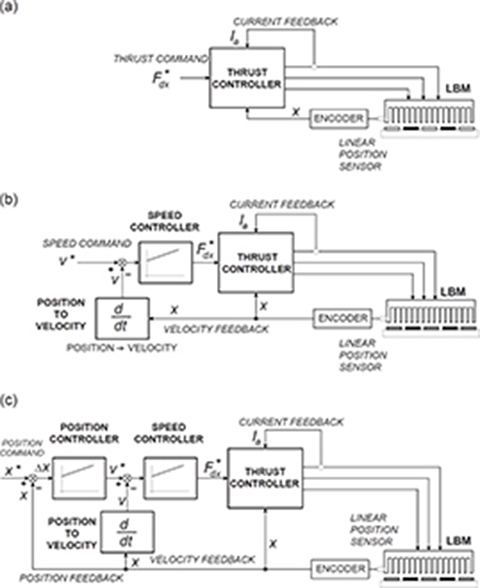
Fig. 6.5. Cascaded control loops for PM LSMs: (a) current-regulated thrust control, (b) velocity and thrust control, (c) position, velocity, and current control.
6.4.1 Open Loop Control
Aluminum shields or mild-steel pole shoes of surface PM LSMs are equivalent to damper cage windings. Solid steel poles of buried PMs behave also as dampers. A damper adds a component of asynchronous thrust production so that the PM LSM can be operated stably from an inverter without position sensors. As a result, a simple constant voltage-to-frequency control algorithm (Fig. 6.6) can provide speed control for applications that do not require fast dynamic response. Thus, PM LSM motors can replace LIMs in some variable-speed drives to improve the drive efficiency with minimal changes to the control electronics.
6.4.2 Closed Loop Control
To achieve high performance motion control with a PM LSM, a position sensor is typically required. The rotor position feedback needed to continuously perform the self-synchronization function for a sinusoidal PM motor is significantly more demanding than that for a square-wave motor. An absolute encoder or resolver is typically required. The second condition for achieving high-performance motion control is high-quality phase current control.

Fig. 6.6. Simplified block diagram of open loop voltage-to-frequency control of a PM LSM with damper.
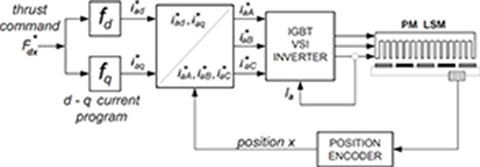
Fig. 6.7. Block diagram of high-performance thrust control scheme for PM LSM using vector control concept.
One of the possible approaches is the vector control shown in Fig. 6.7. The incoming thrust command F*dx
The current commands in the moving reaction rail d-q reference frame (seen as d.c. quantities for a constant thrust command) are then transformed into the instantaneous sinusoidal current commands for the individual armature phases i*aA,i*aB
6.4.3 Zero Direct-Axis Current Control
To obtain the thrust proportional to the armature current ia = iaq and free from the demagnetization of PMs, the PM LSM is driven by the d-axis current iad = 0 control, i.e.,
Fdx=32pπτψfiaqN(6.47)
This means that the angle Ψ between the armature current and q-axis always remains 0° (see the phasor diagram in Fig. 6.2). Eqn (6.47) can also be simply derived assuming sinusoidal space distribution of the excitation magnetic flux density and sinusoidal time-varying armature currents including appropriate phase shifts.
6.4.4 Flux-Weakening Control
High coercivity rare-earth PMs are not affected by the armature reaction flux, and they cannot be permanently demagnetized by the armature flux. The d-axis reaction flux can be used for weakening the flux Φf produced by PMs. The flux-weakening control is similar to the field weakening control of d.c. commutator motors. In PM LSMs, the angle Ψ between the armature current and the q-axis is controlled. The drawback of this control technique is a decrease in the motor efficiency.
The armature current ia is limited by the maximum current iamax, i.e.,
ia=√i2ad+i2aq≤iamax(6.48)
The maximum current iamax is a continuous rated armature current for continuous duty cycle or a maximum available current of the inverter during short-time duty cycle [182].
The terminal voltage v1 is limited by the maximum voltage v1max, i.e.,
υ1=√υ21d+υ21q≤υ1max(6.49)
The maximum voltage v1max is the maximum available output voltage of the inverter, which depends on the d.c. link voltage [182].
According to eqns (3.41) and (6.35), the thrust has two components: synchronous and reluctance thrust. Fig. 6.8 shows the thrust components of the LSM versus angle Ψ for the flux-weakening control. The synchronous thrust is proportional to cos Ψ with maximum at Ψ = 0°. The reluctance thrust takes its maximum value at Ψ = 45°. There is a critical angle Ψcr that corresponds to the maximum total thrust. The critical angle Ψ > 0 only if the reluctance thrust is produced. In an LSM with Xsd ≠ Xsq the maximum thrust for Ψcr > 0 is greater than the thrust for iad = 0 (Ψ = 00) control.
The thrust-speed characteristics of an LSM for iad = 0 control and flux-weakening control are shown in Fig. 6.9.

Fig. 6.8. Thrust plotted against the angle Ψ: 1 — synchronous thrust, 2 — reluctance thrust, 3 — total thrust.

Fig. 6.9. Thrust–speed characteristics: 1 — iad = 0 control, 2 — flux-weakening control.
6.4.5 Direct Thrust Control
The basic idea of the direct thrust control (DTC) is to calculate the armature linkage flux directly from the electromagnetic induction law. The space phasor form of the armature voltage equation in the stationary reference frame is
v1=R1ia+dψdt(6.50)
The armature linkage flux can be found as [115, 254]
ψ=ψ0+∫t1t0(v1−R1ia)dt(6.51)
Since the armature linkage flux is calculated as an integral, an initial value of the armature linkage flux ψ0 is required. The initial value is
ψ0=ψfexp[j(900±Ψ)]
where ψf is the PM flux to be estimated, and (90° ± Ψ) is the angle between the armature and excitation linkage fluxes.
Only the armature resistance R1, space phasor of the armature voltage vector v1 and space phasor of the armature current ia is needed to find the armature linkage flux. This online integration (6.51) can be made with the aid of a high-speed DSP.
Eqn (6.51) shows that the variation of flux ψ depends on the voltage phasor v1. Thus, the flux can be controlled using the voltage phasor. In DTC, an optimum voltage phasor that makes the flux rotate and produce the desired thrust needs to be chosen.
Each voltage phasor is constant during each switching interval, and eqn (6.51) can be written as
ψ=ψ0+v1t−R1∫tt0iadt(6.52)
If R1 is negligible, the armature linkage flux ψ will be following the voltage phasor v1.
In induction motors, when v1 = 0, the armature linkage flux ψ is in a stationary position. In PM LSMs at v1 = 0, the armature flux ψ is not stationary, because there is a relative motion between the armature and the excitation system. Zero voltage phasors cannot be used to control the rotation of ψ of PM LSMS.
The thrust of PM LSMs can be controlled by controlling the angle (900±Ψ) between the armature and excitation linkage fluxes [115].
Depending on whether the actual thrust is smaller or larger than the reference thrust, the voltage phasors turn the linkage flux in the appropriate direction to increase or decrease the angle (900± Ψ) and the thrust. The armature linkage flux always rotates in the direction determined by the output of the hysteresis controller of the thrust [115].
The linkage fluxes ψd(k) and ψq(k) at the kth sampling instant are
ψdk=ψdk−1+(υ1dk−1−R1iad)ts(6.53)
ψqk=ψqk−1+(υ1qk−1−R1iaq)ts(6.54)
ψk=√ψ2dk+ψ2qk(6.55)
where the subscript k − 1 denotes previous samples, and ts is the sampling period.
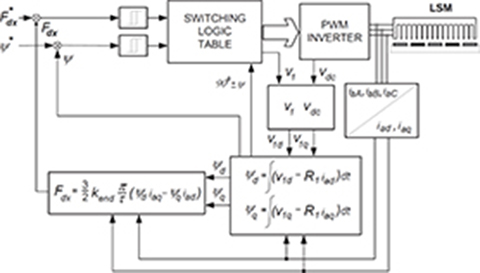
Fig. 6.10. Block diagram of direct thrust control of a PM LSM.
The electromagnetic thrust of an LSM is expressed by eqn (6.35). The end effect can be included by multiplying the thrust by a coefficient kend < 1 that takes into account thrust reduction due to the end effect. Thus
Fdx=32pkendπτ(ψdiaq−ψqiad)(6.56)
The iad and iaq currents are obtained from the measured three-phase currents iaA, iaB, iaC, and the v1d and v1q voltages are calculated on the basis of the d.c. link voltage. The block diagram of the DTC control is shown in Fig. 6.10 [115].
6.4.6 Fuzzy Control
Fuzzy control of a PM LSM or LBM can be implemented according to the block diagram shown in Fig. 6.11. Two fuzzy controllers have been applied: for position and for speed control. A vector control is used in the power circuit with a current-controlled VSI.
6.5 Control of Hybrid Stepping Motors
6.5.1 Microstepping
When a stepping motor is driven in its full-stepping mode and two phases are energized simultaneously (Fig. 6.12a), the thrust available on each step is approximately the same. In the half-stepping mode, two phases and then only one are energized (Fig. 6.12b). If there is the same current in full-stepping and half-stepping modes, in each case a greater thrust is produced where two phases are energized simultaneously. This means that stronger thrust and weaker thrust are produced in each alternate step. The useful thrust is limited by the weaker step; however, there will be a reduction of low-speed pulsations over the full-step mode.
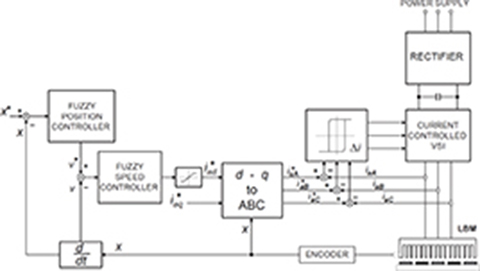
Fig. 6.11. Fuzzy control of a PM LSM or LBM.
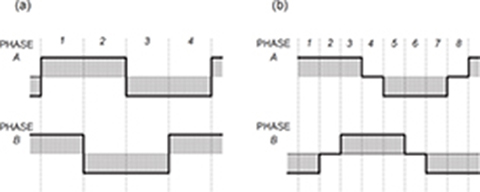
Fig. 6.12. Phase current waveforms: (a) full-stepping, two phases on, (b) half-stepping.
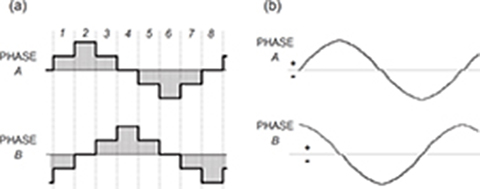
Fig. 6.13. Phase current waveforms to produce approximately equal thrust: (a) half-step current, profiled, (b) microstepping mode.
Approximately equal thrust in every step can be obtained by supplying a higher current when only one phase is energized (Fig. 6.13). The motor will not get overheated because it is designed to operate with two phases to be energized simultaneously. Since the winding losses are proportional to the current squared, approximately the same winding losses are dissipated if two phases are fed at the same time or if only one phase is fed with current increased by √2
The same currents in both two phases produce an intermediate step equal to half of that for only one phase being energized. With unequal two-phase currents, the position of the platen will be shifted toward the stronger pole. This effect is utilized in the microstepping controller that subdivides the basic motor step by proportioning the current in the two-phase winding (Fig. 6.13b). Thus, the step size is reduced, and the operation at low speeds is very smooth. The motor in its microstepping mode operates similar to a two-phase synchronous motor and can even be driven directly from 50 or 60 Hz sinusoidal power supply, provided that a capacitor is connected in series with one phase.
The advantages of microstepping a linear stepping motor include [40]
higher resolution for positioning accuracy,
smoothness at low speeds,
wide speed range,
minimal force loss at resonant frequencies.
6.5.2 Electronic Controllers
To obtain the best performance at minimum settling time (Fig. 6.14), an accelerometer feedback is added, which provides electronic damping to the motor [40]. Accelerometer damping is recommended for HLSM applications that require
very short settling time (Fig. 6.14),
repetitive moves or periodic acceleration transients,
maximum force utilization.
The block diagram of an HLSM controller is shown in Fig. 6.15. Power amplifiers of bipolar type are current controlled and use about 20 kHz fixed frequency and PWM. The resolution is from 50 to 125 microsteps per full step [40].
6.6 Precision Linear Positioning
Linear motors are now playing a key role in advanced precision linear positioning [22]. Linear precision positioning systems can be classified into open-loop systems with HLSMs and closed-loop servo systems with LSMs, LBMs, or LIMs (Fig. 6.16).

Fig. 6.14. HLSM settling time. 1 — with accelerometer, 2 — without accelerometer.

Fig. 6.15. Block diagram of an HLSM controller.
A PM LBM (or LSM) driven positioning stage is shown in Fig. 6.17 [161]. A stationary base is made of aluminum, steel, ceramic, or granite plate. It provides a stable, precise, and flat platform to which all stationary positioning components are attached. The base of the stage is attached to the host system with the aid of mounting screws.
The moving table accommodates all moving positioning components. To achieve maximum acceleration, the mass of the moving table should be as small as possible, and usually aluminum is used as a lightweight material. A number of mounting holes on the moving table is necessary to fix the payload to the mounting table.
Linear bearing rails provide a precise guidance to the moving table. Minimum one bearing rail is required. Linear ball bearing or air bearings are attached to each rail.
The armature of a linear motor is fastened to the moving table and reaction rail (PM excitation system) is built in the base between the rails (Fig. 6.17).
A linear encoder is needed to obtain precise control of position of the table, velocity and acceleration. The readhead of the encoder is attached to the moving table.

Fig. 6.16. Typical linear positioning systems: (a) closed-loop servo system with a.c. or d.c. linear motors, (b) open-loop positioning system with HLSMs, (c) closed-loop positioning system with HLSMs.

Fig. 6.17. Linear positioning stage driven by PM LBM: 1 — base, 2 — moving table, 3 — armature of LBM, 4 — PMs, 5 — linear bearing, 6 — encoder, 7 — cable carrier, 8 — limit switch. Courtesy of Normag, Santa Clarita, CA, USA.
Noncontact limit switches fixed to the base provide an over-travel protection and initial homing. A cable carrier accommodates and routes electrical cables between the moving table and stationary connector box fixed to the base.
An HLSM-driven linear precision stage is of similar construction. Instead of PMs between bearing rails, it has a variable reluctance platen. HLSMs usually need air bearings and, in addition to the electrical cables, an air hose between air bearings and the compressor is required. Comparison between an HLSM and LSM of similar size with air bearings is given in [102].
An enclosed linear positioning stage shown in Fig. 6.18 is equipped with bellows covers (protection against dust and debris), in addition to components sketched in Fig. 6.17 [161].

Fig. 6.18. Enclosed linear positioning stage. 1 — base, 2 — moving table, 3 — bellows cover, 4 — cable carrier, 4 — input/output terminals. Courtesy of Normag, Santa Clarita, CA, USA.
Linear positioning stages with moving coreless armature windings arranged vertically are shown in Fig. 6.19. Fig. 6.19a shows a stage with one moving armature [222], while Fig. 6.19b shows a twin armature stage [16]. A coreless moving armature does not have any ferromagnetic materials so that the positioning stage does not produce any cogging thrust. Moreover, a lightweight moving armature provides high-speed response and high acceleration.
It is possible to employ more than two linear motors in parallel. Fig. 6.20a shows a linear positioning stage with three moving PM excitation systems, while Fig. 6.20b shows a similar construction with four stationary PMs and three moving coreless armature windings [3]. Fig. 6.21 shows a multilayer positioning stage with five moving PM excitation systems [3].
The FEM modeling indicates that the magnetic flux density distribution along the air gap of multilayer LSMs is nonuniform [3]. Any nonuniformity in the magnetic field distribution causes different values of EMFs induced in coils that are distributed along the armature. Consequently, the current density distribution in the armature winding is also nonuniform, which can cause local overheating of the armature system.

Fig. 6.19. Linear positioning stages with moving coreless armature windings: (a) single armature, (b) twin armature. 1 — base, 2 — moving table, 3 — armature of LBM, 4 — PMs, 5 — linear bearing, 6 — linear scale of encoder, 7 — readhead of encoder, 8 — yoke, 9 — cable.
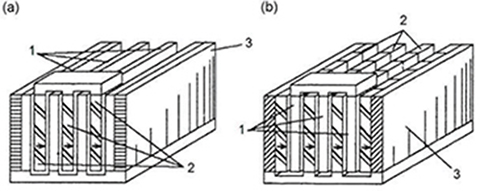
Fig. 6.20. Triple linear positioning stages with moving (a) PMs, (b) coreless armature windings. 1 — coreless armature winding, 2 — PMs, 3 — base. Courtesy of Technical University of Szczecin, Poland, and Institute of Electrodynamics of UNAS, Kiev, Ukraine.
Linear positioning stages are used in semiconductor technology, electronic assembly, quality assurance, laser cutting, optical scanning, water jet cutting, gantry systems (x, y, z stages), color printers, plotters, and Cartesian coordinate robotics [222].
Fig. 6.22 shows an application of a linear positioning stage, according to Fig. 6.19b, to a recorder [16]. The table driven by a twin armature LSM or LBM moves along the rotating drum. The optical recording head fixed to the moving table writes data on the track of the recording film. The mass of recording head is 2 kg, and the width of track is 1.4 mm. The recording head, while writing data, must keep constant position with high accuracy ±1 μm. After writing, the head needs to move quickly to the next track and settle down within 20 ms. The maximum speed and maximum acceleration are 0.22 m/s and 44 m/s2, respectively [16].
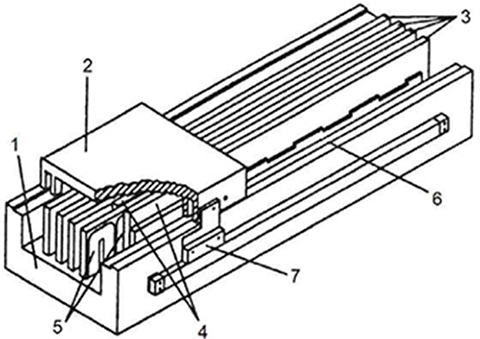
Fig. 6.21. Multilayer linear positioning stage. 1 — base, 2 — moving table, 3 — armature, 4 — PMs, 5 — armature coils, 6 — linear bearing, 7 — readhead of linear encoder. Courtesy of Technical University of Szczecin, Poland, and Institute of Electrodynamics of UNAS, Kiev, Ukraine.

Fig. 6.22. Recorder with a linear positioning stage. 1 — moving table, 2 — base of positioning stage, 3 — recording head, 4 — rotary motor, 5 — recording track, 6 — recording film, 7 — rotary drum, 8 — pedestal. Courtesy of Hitachi Metals Ltd, Saitama, Japan.
Examples
Example 6.1
Given are specifications of a 3-phase, 4-pole, single-sided LSM with surface configuration of PMs and the following specifications: τ = 40 mm, wM = 36 mm, Li = 80 mm, Bmg = 0.65 T, N1 = 440, s1 = 24, wc = τ (full-pitch coils, two-layer winding).
Find the EMF and electromagnetic thrust for sine-wave and square-wave control assuming that the rated armature current Ia=Isqa=8.0 A
Solution
The pole shoe width bp = wM = 36 mm, the number of slots per pole Q1 = 24/8 = 3, the number of slots per pole per phase q1 = 24/(8 × 3) = 1, the winding factor calculated on the basis of eqns (2.39), (2.40), (2.41) kd1 = sin(π/(2 × 3)/[1 × sin(π/(2 × 3 × 1)] = 1, kp1 = sin(π × 40/(2 × 40) = 1, kw1 = 1 × 1 = 1, pole shoe width to pole pitch ratio according to eqn (3.11) αi = 36/40 = 0.9, and the synchronous speed vs = 2×30×0.04 = 2.4 m/s. The number of coils per phase of a two-layer armature winding is Nc = s1/m1 = 24/3 = 8, and the number of turns per coil is nc = N1/Nc = 440/8 = 55.
Sine-wave motor
Form factor of the excitation field according to eqn (3.10)
kf=4πsin(0.9π2)=1.258
Amplitude of the fundamental harmonic of magnetic flux density
Bmg1=kfBmg=1.258×0.65=0.817 T
Fundamental harmonic of the magnetic flux according to eqn (3.26)
Φf1=2π0.04×0.08×1.258×0.65=1.665×10−3Wb
It is assumed that Φf ≈ Φf1 = 1.665 × 10−3 Wb. Amplitude of the fundamental harmonic of EMF induced in a single conductor of the armature winding
Emf1=Bmg1Livs=0.817×0.08×2.4=0.157 V
Armature constant cE according to eqn (6.2)
cE=π0.041√2440×1=24 435.9 1/m
Armature constant kE according to eqn (6.3)
kE=24 435.9×1.665×10−3=40.691 Vs/m
EMF per phase at synchronous speed vs = 2.4 m/s
Ef=40.691×2.4=97.66 V
The characteristic Ef = f(vs), neglecting the armature reaction and saturation, is a straight line. For example, at vs = 1 m/s, Ef = 40.69 V, at vs = 2 m/s, Ef = 81.38 V, at vs = 4.8 m/s, Ef = 195.3 V, etc.
Thrust constant cF according to eqn (6.5)
cF=2cE=2×24 435.9=48 871.7 1/m
Thrust constant kF according to eqn (6.6)
kF=48 871.7×1.665×10−3=81.383 N/A
Electromagnetic thrust at rated current Ia = 8.0 A according to eqn (6.7)
Fdx=3281.383×8.0=976.6 N
Neglecting armature reaction and saturation, the characteristic Fdx = f(Ia) is also a straight line. For Ia = 2 A, Fdx = 244.15 N, for Ia = 6 A, Fdx = 732.44 N, for Ia = 1.2 × 8.0 A, Fdx = 1172 N, etc.
Square-wave motor
Magnetic flux calculated on the basis of eqn (6.10)
Φ(sq)f=0.9×0.04×0.08×0.65=1.872×10−3 Wb
EMF constant cEdc according to eqn (6.12)
cE dx=40.04440×1=44 000 1/m
EMF constant kEdc according to eqn (6.13)
kE dc=44 000×1.872×10−3=82.368 Vs/m
EMF at synchronous speed vs = 2.4 m/s
E(sq)f=44 000×2.4=197.68 V
Please note that the above EMF is induced in two phases connected in series (two phases are conducting at the same time). For sine-wave motor, the EMF Ef = 97.66 is line-to-neutral EMF.
The thrust constants cF dc and kF dc are given by eqn (6.15), i.e.,
cF dc=cEdc=44 000 1/m;kFdc=44 000×1.872×10−3=82.368 N/A
Thrust at rated current Ia = 8 A according to eqn (6.14)
F(sq)dx=82.368×8.0=658.9 N
Square-wave motor to sine-wave motor thrust ratio
F(sq)dxFdx=658.9976.6=0.675
Using eqn (6.17) for Ia=I(sq)a
F(sq)dxFdx≈0.61.872×10−31.665×10−3≈0.675
Example 6.2
For a 2nd order mass-spring-damper system described by eqn (1.26) find the transfer function.
Solution
Eqn (1.26) can be also written as
¨x+Dvm˙x+ksmx=ksmFx(t)k
Putting Dv/m = 2ζωn, ks/m = ωn, and Fx(t)/ks = y(t), the mass-spring-damper system equation can be written in terms of the damping factor ζ and undamped natural frequency ωn, i.e.,
¨x+2ζωn˙x+ω2nx=ω2ny(t)
Transfer functions are defined by the ratio between the Laplace transform of the input, i.e. the normalized force y(t), and the output signal, i.e., the position of the mass x(t). Taking the Laplace transform on both sides of the above equation
L{¨x+2ζωn˙x+ω2nx}=L{ωny(t)}s2X(s)+2ζωnsX(s)+ω2nX(s)=ω2nY(s){s2+2ζωns+ω2n}X(s)=ω2nY(s)
the transfer function of the mass-spring-damper system is
T(s)=X(s)Y(s)=ω2ns2+2ζωns+ω2n
The denominator of the transfer function is the same as the characteristic polynomial of eqn (1.26). The roots of the characteristic polynomial are called poles of the transfer function T (s).
Example 6.3
A flat, single-sided, three-phase PM LSM has the following parameters: R1 = 1.6 Ω, Xsd = 5.0 Ω, Xsq = 4.9 Ω at f = 50 Hz. The axial length of the stack is 0.24 m, number of poles 2p = 8, height of PM hM = 5 mm, coercivity of PM Hc = 850 kA/m, EMF per phase Ef = 80 V. Find
terminal voltage, input power, electromagnetic power, and electromagnetic thrust at Iad = −2.0 A and Iaq = 10 A;
terminal voltage, input power, electromagnetic power, and electromagnetic thrust as functions of Iaq for Ia = 10 A = const, ϕf = const, and 1.0 ≤ Iaq ≤ 10.0 A.
Assumption: LSM operates at steady-state conditions, i.e., (d/dt)Lsdiad = (d/dt)Lsqiaq = 0.
Solution
(a) Terminal voltage, input power, electromagnetic power, and electromagnetic thrust at Iad = −2.0 A and Iaq = 10 A
The angular frequency ω = 2π50.0 = 314.16 rad/s, pole pitch τ = 0.24/8 = 0.03 m, linear synchronous speed vs = 2 × 50.0 × 0.03 = 3.0 m/s, armature currents in dq0 reference frame iad=√2(−2.0)=−2.828 A,iaq=√2(10.0)=14.142 A
Synchronous inductances in the d- and q-axis
Lsd=5.0314.16=0.0159 HLsq=4.9314.16=0.0156 H
Rotor linkage flux
ψf=√280.0314.16=0.36 Wb
Armature rms current
Iad=√(−2.0)2+102=10.2 A
Angle between armature current and q-axis
Ψ=arccos(IaqIa)=arccos(1010.2)=11.21∘
Voltages v1d and v1q in the d-q reference frame for steady-state conditions are calculated with the aid of eqn (6.31), in which (d/dt)Lsdiad = (d/dt)Lsqiaq = 0, i.e.,
[v1dv1q]=[R1−XsqXsdR1][iadiaq]+[0ωψf]=[1.6−4.95.01.6][−2.82814.142]+[0314.16×0.36]=[−73.82121.62]
In phasor form with the d-q reference frame V1d=−73.82/√2=−52.2 V,V1q=121.62/√2=86.0 V, and the rms phase voltage V1=√(−52.2)2+86.02=100.6 V. Input power according to eqn (6.32)
pin=32[(−73.82)×(−2.828)+86.0×14.142]=2893 W
Electromagnetic power according to eqn (6.34)
pelm=32×314.16[0.36+(0.0159−0.0156)(−2.828)]×14.142=2394 W
Electromagnetic thrust developed by the LSM is calculated on the basis of eqn (6.35), i.e.,
Fdx=23943.0=798 N
(b) Terminal voltage, input power, electromagnetic power, and electromagnetic thrust as functions of Iaq for Ia = 10 A = const and 1.0 ≤ Iaq ≤ 10.0 A
The d-axis current in phasor form as a function of Iaq
Iad(Iaq)=√I2a−I2aq
or
iad(Iaq)=√2Iad(Iaq)
The voltages in the d- and q-axis are calculated with the aid of eqn (6.31), i.e.,
v1d(Iaq)=R1iad(Iaq)−Xsq√2Iaqv1q(Iaq)=Xsdiad(Iaq)+R1√2Iaq+ωψf
Armature rms voltage
V1(Iaq)=1√2√[v1d(Iaq)]2+[v1q(Iaq)]2
Table 6.1. Voltage, angle Ψ, input power, electromagnetic power, and thrust as functions of Iaq at Ia = const and ϕf = const. Example 6.2

Input power according to eqn (6.32)
pin(Iaq)=32[v1d(Iaq)iad(Iaq)+v1q(Iaq)√2Iaq]
Electromagnetic power according to eqn (6.34)
pelm=32ω[ψf+(Lsq−Lsq)iad(Iaq)]√2Iaq
Angle between the current Ia and q axis
Ψ(Iaq)=arccos(IaqIa)
Electromagnetic thrust developed by the LSM is calculated on the basis of eqn (6.35), i.e.,
Fdx(Iaq)=pelm(Iaq)υs
The results of the calculations are listed in Table 6.1.
Example 6.4
For f = 60 Hz, t = 0.006 s, rms currents IaA = IaB = IaC = 10 A, and rms voltages V1A = V1B = V1C = 230 V, find the dq0 components of currents and voltages. Prove that the product of transformation matrices [B][B]−1 = [I], where [I] is the square identity matrix. Calculate the power in ABC and dq0 reference frames. The phase angle between the current and voltage is 30°.
Solution
Angular frequency
ω=2πf=2π60=376.99 rad/s
The angle Θ between A-phase and d-axis
Θ=ωt=376.99×0.006=0.262 rad=129.6∘
Phase instantaneous currents
iaA=√2×10cos(129.6∘−30∘)=−2.358 AiaB=√2×10cos(129.6∘−120∘−30∘)=13.255 AiaC=√2×10cos(129.6∘+120∘−30∘)=−10.897 A
Phase instantaneous voltages
υ1A=√2×230cos(129.6∘)=−207.334 Aυ1B=√2×230cos(129.6∘−120∘)=320.714 VυaC=√2×230cos(129.6∘+120∘)=−113.38 V
Blondel transformation matrix given by eqn (6.41)
[B]=23[cos(Θ)cos(Θ−2π3)cos(Θ+2π3)−sin(Θ)−sin(Θ−2π3)−sin(Θ+2π3)121212]=[−0.4250.657−0.232−0.514−0.1110.6250.3330.3330.333]
Inverse of matrix [B] according to eqn (6.43)
[B]−1=[cos(Θ)−sin(Θ)1cos(Θ−2π3)−sin(Θ−2π3)1cos(Θ+2π3)−sin(Θ+2π3)1]=[−0.637−0.77110.986−0.1671−0.3490.9371]
Matrix [B] multiplied by matrix [B]−1 must give a square diagonal identity matrix, i.e.,
[B][B]−1=[−0.4250.657−0.232−0.514−0.1110.6250.3330.3330.333]=[−0.637−0.77110.986−0.1671−0.3490.9371]=[100010001]
Currents in dq0 reference frame
[iadiaqi0]=[B]=[iaAiaBiaC]=[−0.4250.657−0.232−0.514−0.1110.6250.3330.3330.333]=[−2.35813.255−10.897]=[12.247−7.0710.0]
Voltages in dq0 reference frame
[υ1dυ1qυ0]=[B]=[υ1Aυ1Bυ1C]=[0.4250.657−0.232−0.514−0.1110.6250.3330.3330.333]=[−207.334320.714−113.38]=[325.2690.00.0]
If ABC current and voltage systems are balanced, the currents and voltages in dq0 reference frame are independent of time.
Transformation from dq0 to ABC frame will confirm the correctness of calculations, i.e.,
[iaAiaBiaC]=[B]−1=[iadiaqi0]=[−0.637−0.77110.986−0.1671−0.3490.9371]=[12.247−7.0710.0]=[−2.35813.255−10.897]
[υ1Aυ1Bυ1C]=[B]−1=[υ1dυ1qυ0]=[−0.637−0.77110.986−0.1671−0.3490.9371]=[325.26900]=[−207.334320.714−113.38]
The power on the basis of eqn (6.45)
pin(−207.334)×(−2.358)+320.714×13.255+(−113.38)×(−10.897)=5975.57 VA
The power on the basis of eqn (6.46)
pin=32[325.269×12.247+0.0×(−7.071)+2×0.0×0.0]=5975.57 VA
Both equations give the same results. For balanced current and voltage systems in ABC reference frame, the power is independent of time.
1In medicine, a synapse is a point at which a nerve charge passes from one basic reaction unit cell to another.
2The product [A][A]−1 = [I], where [A]−1 is the inverse matrix and [I] is the square identity matrix. The identity matrix is a diagonal stretch of 1s going from the upper-left-hand corner to the lower right, with all other elements being 0.
3The transpose [A]T of matrix [A] is formed by interchanging elements aij with elements aji.