3
Theory of Linear Synchronous Motors
3.1 Permanent Magnet Synchronous Motors
3.1.1 Magnetic Field of the Armature Winding
The time-space distribution of the magnetomotife force (MMF) of a symmetrical polyphase winding with distributed parameters fed with a balanced system of currents can be expressed as
F(x,t)=N1√2Iaπpsin(ωt)∞Σν=11νkw1νcos(νπτx)+N1√2Iaπpsin(ωt−1m12π)∑∞ν=11νkw1cosν(πτx−1m12π)+...+N1√2Iaπpsin(ωt−m1−1m12π)∑∞ν=11νkw1νcosν(πτx−m1−1m12π)=12∑∞ν=1Fmν{sin[(ωt−νπτX)+(ν−1)2πm1]+sin[(ωt+νπτx)−(ν+1)2πm1]}(3.1)
where Ia is the armature phase current, m1 is the number of phases, p is the number of pole pairs, N1 is the number of series turns per phase, kw1ν is the winding factor, ω = 2πf is the angular frequency, τ is the pole pitch, and
for the forward-traveling field
ν=2m1k+1,k=0,1,2,3,4,5,…(3.2)
for the backward-traveling field
ν=2m1k−1,k=1,2,3,4,5…(3.3)
The magnitude of the νth harmonics of the armature MMF is
Fmν=2m1√2πpN1Ia1νkw1ν=m1[Fmν]m1=1(3.4)
where [Fmv]m1=1 is the magnitude of the armature MMF of a single-phase winding. The winding factor for the higher-space harmonics ν > 1 is the product of the distribution factor, kd1ν, and the pitch factor, kp1ν, as given by eqns (2.48), (2.49), and (2.50) in Chapter 2. See also eqns (2.39), (2.40), and (2.41) given in Chapter 2, expressing kw1ν = kw1, kd1ν = kd1, and kp1ν = kp1 for ν = 1.
Assuming that ωt ∓ νπx/τ = 0, the linear synchronous speed of the νth harmonic wave of the MMF is
vsν=∓2fτ1ν(3.5)
For a three-phase winding, the time space distribution of the MMF is
F(x,t)=12∑∞ν=1Fmν{sin[(ωt−πτx)+(ν−1)2π3]+sin[(ωt+νπτx)−(ν+1)2π3]}(3.6)
For a three-phase winding and the fundamental harmonic ν = 1,
F(x,t)=12Fmsin(ωt−πτx)(3.7)
Fm=2m1√2πpN1Iakw1≈0.9m1N1kw1pIa(3.8)
the winding factor kw1 = kd1kp1 is given by eqns (2.39), (2.40), and (2.41), and vs = vsν=1 is according to eqn (1.1).
The peak value of the armature line current density or specific electric loading is defined as the number of conductors (one turn consists of two conductors) in all phases 2m1N1 times the peak armature current √2Ia divided by the armature stack length 2pτ, i.e.,
Am=m1√2N1Iapτ(3.9)
3.1.2 Form Factors and Reaction Factors
The form factor of the excitation field is defined as the ratio of the amplitude of the first harmonic-to-maximum value of the air gap magnetic flux density, i.e.,
kf=Bmg1Bmg=4πsinαiπ2(3.10)
where αi is the pole-shoe bp to pole pitch τ ratio, i.e.,
αi=bpτ(3.11)
The form factors of the armature reaction are defined as the ratios of the first harmonic amplitudes to maximum values of normal components of armature reaction magnetic flux densities in the d-axis and q-axis, respectively, i.e.,
kfd=Bad1Badkfq=Baq1Baq(3.12)
The direct or d-axis is the center axis of the magnetic pole, while the quadrature or q-axis is the axis perpendicular (90° electrical) to the d-axis. The peak values of the first harmonics Bad1 and Baq1 of the armature magnetic flux density can be calculated as coefficients of Fourier series for ν = 1, i.e.,
Bad1=4π∫0.5π0B(x)cosxdx(3.13)
Baq1=4π∫0.5π0B(x)sinxdx(3.14)
For a salient-pole motor with electromagnetic excitation and the air gap g ≈ 0 (fringing effects neglected), the d- and q-axis form factors of the armature reaction are
kfd=αiπ+sinαiππkfq=αiπ−sinαiππ(3.15)
For PM excitation systems, the form factors of the armature reaction are [70]
for surface PMs
kfd=kfq=1(3.16)
for buried magnets
kfd=4πα2i1α2i−1cosπ2αikfq=1π(αiπ−sinαiπ)(3.17)
Formulae for kfd and kfq for inset type PMs and surface PMs with mild steel pole shoes are given in [66].
The reaction factors in the d- and q-axis are defined as
kad=kfdkfkaq=kfdkf(3.18)
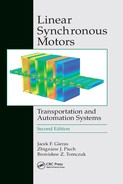
The form factors kf, kfd, and kfq of the excitation field, and armature reaction and reaction factors kad and kaq for salient-pole synchronous machines according to eqns (3.10), (3.15), and (3.18), are given in Table 3.1.
Table 3.1. Factors kf, kfd, kfq, kad, and kaq for salient-pole synchronous machines according to eqns (3.10), (3.15), and (3.18)
Assuming g = 0, the equivalent d-axis field MMF (which produces the same fundamental wave flux as the armature-reaction MMF) is
Fad=kadFad=m1√2πN1kw1pkadIasinΨ(3.19)
where Ia is the armature current, and Ψ is the angle between the phasor of the armature current Ia and the q-axis, i.e., Iad = Ia sin Ψ. Similarly, the equivalent q-axis field MMF is
Faq=kaqFaq=m1√2πN1kw1pkaqIacosΨ(3.20)
where Iaq = Ia cos Ψ. In the theory of synchronous machines with electromagnetic excitation, the MMFs Fexcd and Fexcq are defined as the armature MMFs referred to the field excitation winding.
3.1.3 Synchronous Reactance
For a salient-pole synchronous machine, the d-axis and q-axis synchronous reactances are
Xsd=X1+XadXsq=X1+Xaq(3.21)
where X1 = 2πfL1 is the armature leakage reactance according to eqn (2.32), Xad is the d-axis armature reaction reactance, also called d-axis mutual reactance; and Xaq is the q-axis armature reaction reactance, also called q-axis mutual reactance. The reactance Xad is sensitive to the saturation of the magnetic circuit, while the influence of the magnetic saturation on the reactance Xaq depends on the field excitation system design. In salient-pole synchronous machines with electromagnetic excitation, Xaq is practically independent of the magnetic saturation. Usually, Xsd > Xsq except for some PM synchronous machines.
The d-axis armature reaction reactance
Xad=kfdXa=4m1μ0f(N1kw1)2πpτLig′kfd(3.22)
where μo is the magnetic permeability of free space, Li is the effective length of the stator core, g ≈ kCksatg + hM/μrrec is the equivalent air gap in the d-axis, kC is the Carter’s coefficient for the air gap according to eqn (2.44), ksat > 1 is the saturation factor of the magnetic circuit, and
Xa=4m1μ0f(N1kw1)2πpτLig′(3.23)
is the armature reaction reactance of a non-salient-pole (surface configuration of PMs) synchronous machine. Similarly, for the q-axis,
Xaq=kfqXa=4m1μ0f(N1kw1)2πpτLikCksatqgqkfq(3.24)
where gq is the air gap in the q-axis. For salient-pole excitation systems, the saturation factor ksatq ≈ 1 since the q-axis armature reaction fluxes, closing through the large air spaces between the poles have insignificant effect on the magnetic saturation.
The leakage reactance X1 consists of the slot, end-connection differential and tooth-top leakage reactances — see eqn (2.32). Only the slot and differential leakage reactances depend on the magnetic saturation due to leakage fields.
3.1.4 Voltage Induced
The no-load rms voltage induced (EMF) in one phase of the armature winding by the d.c. or PM excitation flux Φf is
Ef=π√2fN1kw1Φf(3.25)
where N1 is the number of the armature turns per phase, kw1 is the armature winding coefficient, f = vs/(2τ), and the fundamental harmonic Φf1 of the excitation magnetic flux density Φf without armature reaction is
Φf1=Li∫τ0Bmg1sin(πτx)dx=2πτLiBmg1(3.26)
Similarly, the voltage Ead induced by the d-axis armature reaction flux Φad and the voltage Eaq induced by the q-axis flux Φaq are, respectively,
Ead=π√2fN1kw1Φad(3.27)
Eaq=π√2fN1kw1Φaq(3.28)
The EMFs Ef, Ead, Eaq, and magnetic fluxes Φf, Φad, and Φaq are used in the construction of phasor diagrams and equivalent circuits. The EMF Ei per phase with the armature reaction taken into account is
Ei=π√2fN1kw1Φg(3.29)
where Φg is the air gap magnetic flux under load (excitation flux Φf reduced by the armature reaction flux). Including armature leakage flux Φlg,
Ei=π√2fN1kw1Φ(3.30)
where Φ = Φg − Φlg. At no-load (very small armature current), Φg ≈ Φf. Including the saturation of the magnetic circuit,
Ei=4σffN1kw1Φ(3.31)
The form factor σf of EMFs depends on the magnetic saturation of armature teeth, i.e., the sum of the air gap magnetic voltage drop (MVD) and the teeth MVD divided by the air gap MVD.
3.1.5 Electromagnetic Power and Thrust
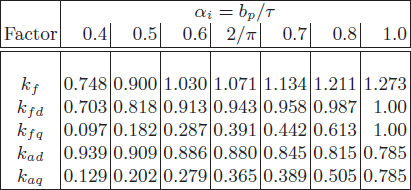
The following set of equations stems from the phasor diagram of a salient-pole synchronous motor shown in Fig. 3.1:
V1sinδ=−IadR1+IaqXsqV1cosδ=IaqR1+IadXsd+Ef(3.32)
in which δ is the load angle between the terminal phase voltage V1 and Ef (q axis). The currents
Iad=V1(Xsqcosδ−R1sinδ)−EfXsqXsdXsq+R21(3.33)
Iaq=V1(R1cosδ+Xsdsinδ)−EfR1XsdXsq+R21(3.34)
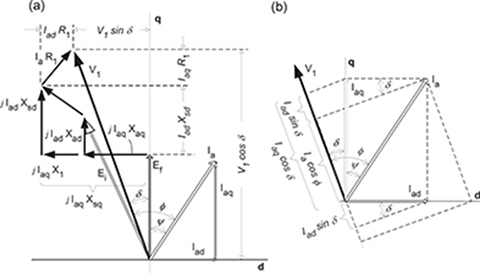
Fig. 3.1. Phasor diagram of an underexcited salient pole synchronous motor: (a) full phasor diagram; (b) auxiliary diagram for calculation of input power.
are obtained by solving the set of eqns (3.32). The rms armature current as a function of V1, Ef, Xsd, Xsq, δ, and R1 is
Ia=√I2ad+I2aq=V1XsdXsq+R21×√[(Xsqcosδ−R1sinδ)−EfV1Xsq]2+[(R1cosδ+Xsdsinδ)−EfV1R1]2(3.35)
The phasor diagram (Fig. 3.1) can also be used to find the input power [70], i.e.,
Pin=m1V1Iacosϕ=m1V1(Iaqcosδ−Iadsinδ)(3.36)
Putting eqns (3.32) into eqn (3.36),
Pin=m1[IaqEf+IadIaqXsd+I2aqR1−IadIaqXsq+I2adR1]=m1[IaqEf+R1I2a+IadIaq(Xsd−Xsq)](3.37)
Because the armature core loss has been neglected, the electromagnetic power is the motor input power minus the armature winding loss ΔP1w=m1I2aR1=m1(I2ad+I2aq)R1. Thus,
Pelm=Pin−ΔP1w=m1[IaqEf+IadIaq(Xsd−Xsq)]=m1[V1(R1cosδ+Xsdsinδ)−EfR1)](XsdXsq+R21)2(3.38)
Putting R1 = 0, eqn (3.38) takes the following simple form,
Pelm=m1[V1EfXsdsinδ+V212(1Xsq−1Xsd)sin2δ](3.39)
Small PM LSMs have a rather high armature winding resistance R1 that is comparable with Xsd and Xsq. That is why eqn (3.38), instead of (3.39), is recommended for calculating the performance of small, low-speed motors.
The electromagnetic thrust developed by a salient-pole LSM is
Fdx=PelmvsN(3.40)
Neglecting the armature winding resistance (R1 = 0),
Fdx=m1vs[V1EfXsdsinδ+V212(1Xsq−1Xsd)sin2δ](3.41)
Fig. 3.2. Thrust-angle characteristics of a salient-pole synchronous machine with Xsd > Xsq. 1 — synchronous thrust Fdsyn developed by the machine, 2 — reluctance thrust Fdrel, 3 — resultant thrust Fd.
In a salient-pole synchronous motor, the electromagnetic thrust has two components (Fig. 3.2)
Fdx=Fdxsyn+Fdxrel(3.42)
where the first term,
Fdxsyn=m1vsV1EfXsdsinδ(3.43)
is a function of both the input voltage V1 and the excitation EMF Ef. The second term,
Fdxrel=m1V212vs(1Xsq−1Xsd)sin2δ(3.44)
depends only on the voltage V1 and also exists in an unexcited machine (Ef = 0) provided that Xsd ≠ Xsq. The thrust Fdxsyn is called the synchronous thrust, and the thrust Fdxrel is called the reluctance thrust. The proportion between Xsd and Xsq strongly affects the shape of curves 2 and 3 in Fig. 3.2. For surface configurations of PMs, Xsd ≈ Xsq (if the magnetic saturation is neglected) and
Fdx≈Fdxsyn=m1vsV1EfXsdsinδ(3.45)
3.1.6 Minimization of d-axis Armature Current
For zero d-axis armature current, all current Ia = Iaq is torque producing. The d-axis armature current is zero (Iad = 0) if the numerator of eqn (3.33) is zero, i.e.,
V1Xsqcosδ−V1R1sinδ−EfXsq=0(3.46)
or
(−V1R1sinδ)2=(EfXsq−V1Xsqcosδ)2
After putting sin2 δ = 1 − cos2 δ, the following 2nd order linear equation is obtained,
[(V1Xsq)2+(V1R1)2]cos2δ−2V1EfX2sqcosδ+(EfXsq)2−(V1R1)2=0(3.47)
or
ax2+bx+c=0(3.48)
where x = cos δ, a = (V1Xsq)2 + (V1R1)2, b=−2V1EfX2sq, and c = (EfXsq)2 − (V1R1)2. Eqn (3.47) or eqn (3.48) has two roots:
δ1=arccos(x1)=arccos(−b−√Δ2a)(3.49)
δ2=arccos(x2)=arccos(−b+√Δ2a)(3.50)
where the discriminant of quadratic equation Δ = b2 − 4ac. To obtain Iad = 0, at least one root must be a real number. Sometimes both two roots are complex numbers. In this case, for motoring mode, most often the EMF Ef, is greater than the terminal voltage V1. It means that the number of turns per phase must be reduced.
3.1.7 Thrust Ripple
The thrust ripple can be expressed as the rms thrust ripple √∑F2dxv weighted to the mean value of the thrust Fdx developed by the LSM, i.e.,
fr=1Fdx√∑νF2dxν(3.51)
The thrust ripple of an LSM consists of three components: (1) detent thrust (cogging thrust), i.e., interaction between the excitation flux and variable permeance of the armature core due to slot openings, (2) distortion of sinusoidal or trapezoidal distribution of the magnetic flux density in the air gap and, (3) phase current commutation and current ripple.
Case Study 3.1. Single-Sided PM LSM
A flat, short-armature, single-sided, three-phase LSM has a long reaction rail with surface configuration of PMs. High-energy sintered NdFeB PMs with the remanent magnetic flux density Br = 1.1 T and coercive force Hc = 800 kA/m have been used. The armature magnetic circuit has been made of cold-rolled steel laminations Dk-66 (Table 2.3) The following design data are available: armature phase windings are Y-connected, number of pole pairs p = 4, pole pitch τ = 56 mm, air gap in the d-axis (mechanical clearance) g = 2.5 mm, air gap in the q-axis gq = 6.5 mm, effective width of the armature core Li = 84 mm, width of the core (back iron) of the reaction rail w = 84 mm, height of the armature core (yoke) h1c = 20 mm, length of the overhang (one side) le = 90 mm, number of armature turns per phase N1 = 560, number of parallel wires aw = 2, number of armature slots s1 = 24, width of the armature tooth ct = 8.4 mm, height of the core (yoke) of the reaction rail h2c = 12 mm, dimensions of the armature open rectangular slot: h11 = 26.0 mm, h12 = 2.0 mm, h13 = 3.0 mm, h14 = 1.0 mm, b14 = 10.3 mm (see Fig. 2.17b), stacking coefficient of the armature core ki = 0.96, conductivity of armature wire σ20 = 57 × 106 S/m at 200C, diameter of armature wire dwir = 1.02 mm, temperature of armature winding 750C, height of the PM hM = 4.0 mm, width of the PM wM = 42.0 mm, length of the PM (in the direction of armature conductors) lM = 84 mm, width of the pole shoe bp = wM = 42.0 mm, and friction coefficient for rollers at constant speed μv = 0.01.
The coil pitch wc of the armature winding is equal to the pole pitch τ (full pitch winding).
The LSM is fed from a VVVF inverter, and the ratio of the line voltage to input frequency V1L/f = 10. The PM LSM has been designed for continuous duty cycle to operate with the load angle δ corresponding to the maximum efficiency. The current density in the armature winding normally does not exceed ja = 3.0 A/mm2 (natural air cooling).
Calculate the steady-state performance characteristics for f = 20, 15, 10 and 5 Hz.
Solution
For V1L/f = 10, the input line voltages are 200 V for 20 Hz, 150 V for 15 Hz, 100 V for 10 Hz, and 50 V for 5 Hz. Steady-state characteristics have been calculated using analytical equations given in Chapters 1, 2, and 3. The volume of the PM material per 2pτ is p×2hM×wM×lM = 4×2×4×42×84 = 112, 896 mm3.
Given below are parameters independent of the frequency, voltage, and load angle δ:
number of slots per pole per phase q1 = 1
winding factor kw1 = 1.0
pole pitch measured in slots = 3
pole shoe to pole pitch ratio αi = 0.75
coil pitch measured in slots = 3
coil pitch measured in millimeters wc = 56 mm
armature slot pitch t1 = 18.7 mm
width of the armature slot b11 = b12 = b14 = 10.3 mm
number of conductors in each slot Nsl = 280
conductors cross section area to slot area (slot fill factor) kfill = 0.2252
Carter’s coefficient kC = 1.2
form factor of the excitation field kf = 1.176
form factor of the d-axis armature reaction kfd = 1.0
form factor of the q-axis armature reaction kfd = 1.0
reaction factors kad = kaq = 0.85
coefficient of leakage flux σl = 1.156
permeance of the air gap Gg = 0.1370 × 10−5 H
permeance of the PM GM = 0.1213 × 10−5 H
permeance for leakage fluxes GlM = 0.2144 × 10−6 H
magnetic flux corresponding to the remanent magnetic flux density Φr = 0.3881 × 10−2 Wb
relative recoil magnetic permeability μrrec = 1.094
PM edge line current density JM = 800, 000.00 A/m
mass of the armature core m1c = 5.56 kg
mass of the armature teeth m1t = 4.92 kg
mass of the armature conductors mCu = 15.55 kg
friction force Fr = 1.542 N
Then, resistances and reactances independent of magnetic saturation have been calculated,
armature winding resistance R1 = 2.5643 Ω at 75°C
armature winding leakage reactance X1 = 4.159 Ω at f = 20 Hz
armature winding leakage reactance X1 = 1.0397 Ω at f = 5 Hz
armature reaction reactance Xad = Xaq = 4.5293 Ω at f = 20 Hz
armature reaction reactance Xad = Xaq = 1.1323 Ω at f = 5 Hz
specific slot leakage permeance λ1s = 1.3918
specific leakage permeance of end connections λ1e = 0.2192
specific tooth-top leakage permeance λ1t = 0.1786
specific differential leakage permeance λ1d = 0.21
coefficient of differential leakage τd1 = 0.0965
Note that for calculating Xad of an LSM with surface PMs, the nonferromagnetic air gap is the gap between the ferromagnetic cores of the armature and reaction rail. The relative magnetic permeability of NdFeB PMs is very close to unity.
Steady-state performance characteristics have been calculated as functions of the load angle δ. The load angle of synchronous motors can be compared to the slip of induction motors, which is also a measure of how much the motor is loaded. Magnetic saturation due to main flux and leakage fluxes has been included. An LSM should operate with maximum efficiency. Maximum efficiency usually corresponds to the d-axis current Iad ≈ 0. Table 3.2 shows fundamental steady-state performance characteristics for f = 20, 15, 10, and 5 Hz. In practice, the maximum efficiency corresponds to small values (close to zero) of the angle Ψ, i.e., the angle between the phasor of the armature current Ia and the q-axis, which means that the d-axis armature current Iad for maximum efficiency is very small, or Iad = 0 (Section 3.1.6 and Chapter 6).
Table 3.3 contains calculation results for maximum efficiency and two extreme frequencies f = 20 Hz and f = 5 Hz, including magnetic saturation. The magnetic flux density in armature teeth for maximum efficiency is well below the saturation magnetic flux density (over 2.1 T for Dk-69 laminations). This value is close to the saturation value for higher load angles δ ≥ 600. Also, the armature current Ia and, consequently, line current density Am and current density ja increase with the load angle δ.
Table 3.2. Steady-state performance characteristics of a flat three-phase, four-pole LSM with surface PMs and τ = 56 mm
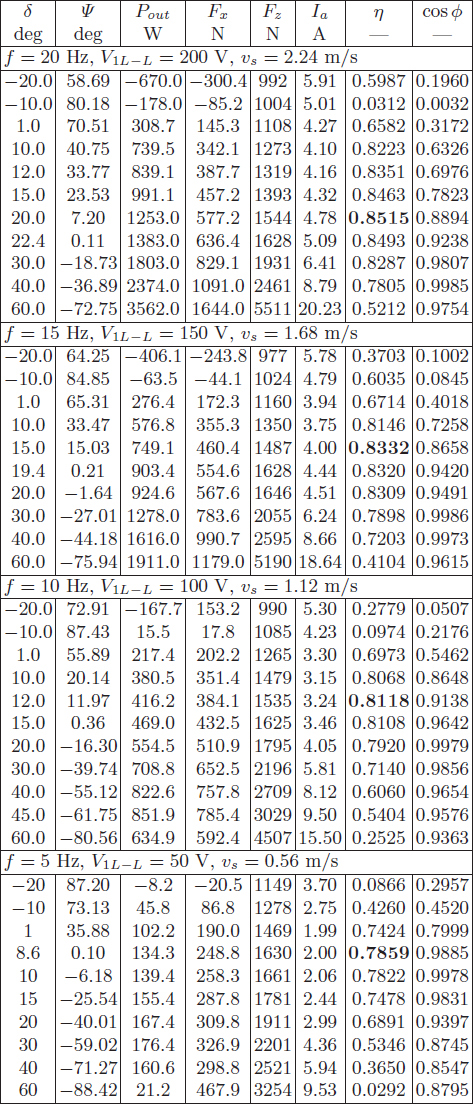
Table 3.3. Calculation results for maximum efficiency with magnetic saturation taken into account

3.1.8 Magnetic Circuit
The equivalent magnetic circuit shown in Fig. 3.3 has been created on the basis of the following assumptions:
(a) Symmetry axis exists every 180° electrical degrees (one pole pitch).
(b) The magnetic flux density, magnetic field intensity and relative magnetic permeability in every point of each ferromagnetic portion of the magnetic circuit (PMs, cores, teeth) is constant.
(c) The air gap leakage flux is only between the heads of teeth.
(d) The magnetic flux of the armature (primary unit) penetrates only through the teeth and core (yoke).
(e) The equivalent reluctance of teeth per pole pitch is ℜt/Q1, where ℜt is the reluctance of a single tooth and Q1 is the number of teeth (slots) per pole.
Each portion of the magnetic circuit is replaced by equivalent reluctances:
reluctance of PM
ℜM=hMμ0μrrecwMLM(3.52)
reluctance of air gap
ℜg=gkCμ0wMlM=gkCμ0αiτLM(3.53)
reluctance of a single tooth
ℜt=htμ0μrtctLiki(3.54)
reluctance of the armature core (yoke) per pole pitch
ℜ1c≈τ+h1cμ0μr1ch1cLiki(3.55)
reluctance of a the reaction rail core (yoke) per pole pitch
ℜ2c≈τ+h2cμ0μr2ch2cLM(3.56)
reluctance for the PM leakage flux
ℜlM=1GlM(3.57)
in which
GlM≈2μ0(0.52lM+0.26wM+0.308hM)ifhM≤xM(3.58)
GlM≈2μ0(hMlMxM+0.26wM+0.308hM)ifhM>xM(3.59)
reluctance for the air gap leakage flux
ℜlg≈1μ05+4gkC/b145gkC/b141Li(3.60)
In the foregoing equations (3.52) to (3.60), μrrec is the relative recoil magnetic permeability of the PM, μrt is the relative magnetic permeability of the armature tooth, μr1c is the relative magnetic permeability of the armature core (yoke), μr2c is the relative magnetic permeability of the reaction rail (core), hM is the height of the PM per pole, wM is the width of the PM, and lM is the length of the PM in the direction perpendicular to the plane of the traveling field, h1c is the height of the armature core (yoke), h2c is the height of the reaction rail core, b14 is the armature slot opening, kC is Carter’s coefficient, τ is the pole pitch, Li is the effective length of the armature stack (in the direction perpendicular to laminations), and xM is the distance between adjacent PMs. The magnetic flux Φf is excited by the MMF FM = HchM of PMs, the armature reaction MMF Fad is given by eqn (3.19), Φf is the PM excitation flux (flux at no load), Φg is the air gap magnetic flux, and Φ is the magnetic flux linked with the primary winding (air gap flux Φg reduced by the air gap leakage flux Φlg, if included).
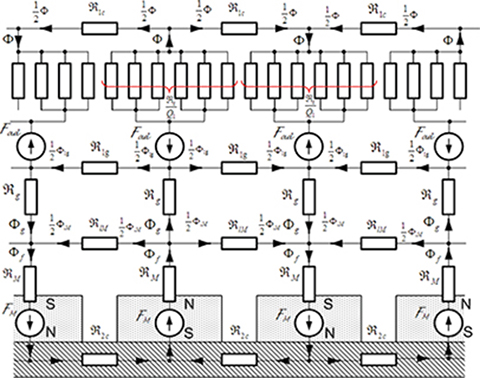
Fig. 3.3. Magnetic circuit of an LSM with surface PMs. Symbols are described in the text.
Reluctances for leakage fluxes ℜlM, according to eqns (3.57), (3.58), and (3.59), have been calculated by dividing the magnetic field into simple solids. The reluctance (3.58) is a parallel connection of the reluctances of two one-quarters of a cylinder (B.16), two half-cylinders (B.15), and four one-quarters of a sphere (B.21). The reluctance (3.59) is a parallel connection of the reluctances of two prisms (B.13), two half-cylinders (B.15), and four one-quarters of a sphere (B.21).
The following Kirchhoff’s equations can be written for the magnetic circuit presented in Fig. 3.3:
2ΦRtQ1+12Φℜ1c−12Φlgℜlg=−2Fad(3.61)
Φg=Φ+Φlg(3.62)
Φf=Φg+ΦM(3.63)
2ΦfℜM+12ΦlMℜlM+12Φfℜ2c=2FM(3.64)
2(FM−Fad)=2ΦfℜM+2Φgℜg+2ΦℜtQ1+12Φℜ1c+12Φfℜ2c(3.65)
The solution to these equations gives magnetic fluxes in the following form,
magnetic flux excited by PMs
Φf=2(FM−Fad−4Fadℜg/ℜlg)A+2(FM+FadℜlM/ℜlg)(2/ℜlM)BAC+BD(3.66)
magnetic flux linked with the armature winding
Φ=2(FM−Fad−4Fadℜg/ℜlg)D−2(FM+FadℜlM/ℜlg)(2/ℜlM)CAC+BD(3.67)
air gap magnetic flux
Φg=ΦA+4Fadℜlg(3.68)
The leakage fluxes result from eqns (3.62) and (3.63), i.e.,
Φlg=Φg−Φ(3.69)
ΦlM=Φf−Φg(3.70)
In the above eqns (3.66) to (3.68),
A=1+1ℜlg(2ℜtQ1+12ℜ1c)(3.71)
B=2Aℜg+2ℜtQ1+12ℜ1c(3.72)
C=2ℜPM+12ℜ2c(3.73)
D=1+4ℜMℜlM+ℜ2cℜlM(3.74)
The coefficient of PMs leakage flux
σlM=1+ΦlMΦf(3.75)
The coefficient of total leakage flux
σl≈1+ΦlM+ΦlgΦf(3.76)
If ℜlg → ∞ and ℜlM → ∞, then A → 1. It means that leakage fluxes Φlg → 0 and ΦlM → 0. Thus, the magnetic flux
Φf=Φg=Φ=2(FM−Fad)2(ℜM+ℜg+ℜtQ1)+0.5(ℜ1c+ℜ2c)(3.77)
3.1.9 Direct Calculation of Thrust
The thrust of a PM LSM can be calculated directly on the basis of the electromagnetic field distribution [152]. Fig. 3.4 shows a single-sided PM LSM in the Cartesian coordinate system. The problem can be simplified to a two-dimensional (2D) field distribution where currents (y direction) in the armature winding are perpendicular to the laminations, and magnetic flux density has only two components, i.e., tangential component Bx and normal component Bz.
The 2D electromagnetic field distribution will be found on the basis of the following assumptions:
(a) The armature core is an isotropic and slotless cube with its magnetic permeability tending to infinity and electric conductivity tending to zero.
(b) The armature winding is represented by an infinitely thin current sheet distributed uniformly at the active surface of the armature core.
(c) The armature currents flow only in the direction perpendicular to the xz plane, i.e., in the y direction.
(d) The width of the PM is bp < τ.

Fig. 3.4. Model of a single-sided LSM with surface configuration of PMs for 2D electromagnetic field analysis.
(e) Isotropic PMs are magnetized in the normal direction (z coordinate) and have zero electric conductivity.
(f) Each PM is represented by an equivalent coil embracing the PM and carrying a fictitious surface current that produces an equivalent magnetic flux.
(g) The magnetic permeability of the space between PMs is equal to that of PMs.
(h) The core of the reaction rail is an isotropic cube with its magnetic permeability tending to infinity and electric conductivity tending to zero.
Simplifications given by assumptions (a) and (b) can be corrected by replacing the air gap g between the armature core and PMs by an equivalent air gap g = kCg, where kC is Carter’s coefficient. The time-space distribution of the armature line current density for the fundamental space harmonic can be obtained by taking the first derivative of the primary MMF distribution with respect to the x coordinate. According to eqns (3.7) and (3.8),
a(x,t)=dF(x,t)dx=−m1√2pτN1Iakw1cos(ωt−βx)(3.78)
or
a(x,t)=−Re[Amejωt−βx]=−Re[Amejωte−jβx](3.79)
where the peak value of the line current density
Am=m1√2N1kw1Iapτ(3.80)
and the constant
β=πτ(3.81)
The line current density (3.80) obtained as dF(x, t)/dx has in numerator the effective number of turns N1kw1, instead of the number of turns N1 — see eqn (3.9). Eqn 3.9) is according to the definition of the line current density.
The space distribution of the armature line current density is simply
a(x)=−Re[Ame−jβx]=−Amcosβx(3.82)
According to assumption (f) and for 2D problem, the equivalent edge line current density [152] representing a PM is the same as Hc for the linear demagnetization curve, i.e.,
JM=Brμ0μrrecA/m(3.83)
where Br is the remanent magnetic flux density, and μrrec is the relative recoil magnetic permeability of a PM (Chapter 2 and Appendix A). If, say, Br = 1.1 T and μrrec = 1.05, the equivalent edge line current density JM ≈ 0.834×106 A/m.
The PM magnetic flux density equal to the remanent flux density Br is constant over the whole width bp = αiτ of the PM and takes its sign according to the polarity of PMs. Such a periodical function b(x)=∑∞v=1bvsin(vπx/τ) can be resolved into Fourier series the coefficient bν of which, for the fundamental harmonic
2τ∫05(τ+bp)0.5(τ−bp)Brsin(βx)dx=Br4πsinαiπ2=Brkf(3.84)
is equal to the product of Br times the form factor of the excitation field according to eqn (3.10). Thus, the equivalent current density distribution representing the PM for ν = 1 is
jM(x)=kfBrμ0μrsinβx=kfJMsin(βx)(3.85)
Assumption (g) can be partially justified due to the fact that the relative magnetic permeability of the NdFeB PM is usually 1.0 to 1.1, i.e., close to the relative magnetic permeability of free space.
The 2D electromagnetic field distribution excited by the armature winding in both regions I and II (Fig. 3.4) can be described by Laplace’s equation
∂2A∂x2+∂2A∂z2=0(3.86)
where A is the magnetic vector potential defined as B = curlA (B = ∇A).
Using the method of separation of variables, the solution to eqn (3.86) for the fundamental space harmonic can have the following form:
Ay(x,z,t)=ej(ωt−βx)(Ae−βz+Beβz)(3.87)
According to eqn (3.82), the space distribution of the primary line current density is according to cosinusoidal law. Hence, the line current density given by eqn (3.87) can be expressed as a real number, i.e.,
Ay(x,z)=cos(βx)(Ae−βz+Beβz)(3.88)
According to assumption (c), the magnetic vector potential can only have one component Ay in the y direction so that, in the Cartesian coordinate system,
Bx=−∂Ay∂zBz=−∂Ay∂x(3.89)
The components of the magnetic flux density in region I and region II are
Bx(x,z)=−∂Ay(x,z)∂z=βcos(βx)(Ae−βz−Beβz)(3.90)
Bz(x,z)=∂Ay(x,z)∂x=−βsin(βx)(Ae−βz+Beβz)(3.91)
On the basis of assumption (a), the magnetic permeability of the primary stack tends to infinity. Thus, at z = 0,
BxI(x,z=0)μ0=a(x)
or, on the basis of eqn (3.82),
β(AI−BI)=−μ0Am(3.92)
where the amplitude of the line current density Am is according to eqn (3.80).
At z = g,
BxI(x,z=g)μ0=BxII(x,z=g)μ0μrrecandBzI(x,z=g)=BzII(x,z=g)
or
μrrec(AIe−βg−BIeβg)=AIIe−βg−BIIeβg(3.93)
AIe−βg+BIeβg=AIIe−βg+BIIeβg(3.94)
At z = g + hM,
Bx(x,z=g+hM)=0
or
AIIe−β(g+hM)−BIIeβ(g+hM)=0(3.95)
The foregoing boundary conditions allow for finding all constants AI, AII, BI, and BII (four equations). For example, the constants AII and BII are
AII=C′eβ(g+hM)BII=C′e−β(g+hM)
where
C′=1μrrelcosh(βhM)sinh(βg)+sinh(βhM)cosh(βg)μ0μrrel2βAm
Putting the constants AII and BII into eqns (3.91), the space distribution of the first harmonic of the normal component of the armature magnetic flux density is
BzII(x,z)=−2βC′sin(βx)cosh[β(g+hM−z)](3.96)
The thrust for the fundamental harmonic can be found on the basis of the Lorentz equation. The force increment acting on an edge with the coordinate x = bp/2 and line current density JM is dFdx = BzII(x = 0.5bp, z)JMLidz. For 2 × 2p edges and neglecting the “–” sign
Fdx=8pLiJMβC′∫g+hMgsinαiπ2cosh[β(g+hM−z)]dz∫g+hMgcosh[β(hM+g−z)]dz=1βsinh(βhM)=τπsinh(βhM)(3.97)
Finally,
Fdx=4πpτLiBrAmsin(αiπ2)tanh(βhM)μrrelsinh(βg)+tanh(βhM)cosh(βg)(3.98)
The above eqn (3.98) has been derived and verified by H. Mosebach [152] and then developed further for armature line current waveforms other than sinusoidal [153].
3.2 Motors with Superconducting Excitation Coils
The model of a coreless LSM with SC electromagnets is shown in Fig. 3.5 [14, 62, 124, 190]. The following assumptions have been made to find the 2D distribution of magnetic and electric field components:
(a) The armature winding is represented by an infinitely long (x direction) and infinitely thin (z direction) current sheet that is distributed uniformly at z = g (xy surface).
(b) The distribution of electromagnetic field in the x direction is periodical with the period equal to 2τ.
(c) The armature currents flow only in the direction perpendicular to the xz plane, i.e., in the y direction.
(d) The air-cored excitation winding is represented by an infinitely thin current sheet distributed uniformly at the z = 0 of the xy surface.
(e) The electromagnetic field does not change in the y direction.
(f) End effects due to the finite length of windings (x direction) are neglected.
(g) Only the fundamental space harmonic ν = 1 of the field distribution in the x direction is taken into account.

Fig. 3.5. Model of an air-cored LSM with SC excitation system for the electromagnetic field analysis: (a) winding layout, (b) armature and field excitation current sheets.
The armature winding can be represented by the following space-time distribution of the line current density (current sheet) expressed as a complex number
a(x,t)=Amej(ωt−βx)(3.99)
and the field excitation winding can be described by the following space-time distribution of the complex line current density
af(x,t)=Amfej(ωt−βx−ε)(3.100)
where the peak values of line current densities are
for the armature winding — see eqn (3.80)
Am=m1√2N1kw1Iapτ=2m1√2N1pkw1Iaτ(3.101)
for the field excitation winding (d.c. current excitation)
Amf=2NfkwfIfpτ=4NfpkwfIfτ(3.102)
The number of series armature turns per phase is N1 = 2pN1p where N1p is the number of armature series turns per phase per pole, and the number of field series turns Nf = 2pNfp where Nfp is the number of field turns per pole.
The so-called force angle = 900 ∓ Ψ is the angle between phasors of the excitation flux Φf in the d-axis and the armature current Ia.
The 2D distribution of the magnetic vector potential of the field excitation winding is described by the Laplace’s equation
∂2Afy∂x2+∂2Afy∂z2=0(3.103)
The general solution to eqn (3.103) for 0
Afy(x,z)=Cfej(ωt−βx−ε)e−βz(3.104)
On the basis of the definition of the magnetic vector potential, there are only two components of the magnetic flux density of the field excitation winding, i.e.,
Bfx=−∂Afy∂z=βAfyBfz=∂Afy∂x=−jβAfy(3.105)
According to Ampère’s circuital law applied to the field excitation current sheet (z = 0),
2∫Hfx(x,z=0)dx=∫a(x,t)dx
and using the first eqn (3.105),
Hfx(x,z=0)=Bfx(x,z=0)μ0=−1μ0∂Afy(x,z=0)∂z=βμ0Afy(x,z=0)
The constant Cf in eqn (3.104) is
Cf=μ0Amf2β
and
Afy(x,z)=μ02βAmfej(ωt−βx−ε)e−βz(3.106)
The components Bfx and Bfz can be found on the basis of eqns (3.105) and (3.106).
The magnetic vector potential of the armature winding has a similar form as eqn (3.106), i.e.,
Ay(x,z)=μ02βAmej(ωt−βx)e−β(g−z)(3.107)
The forces in the x and z direction per unit area can be found on the basis of the Lorentz equation, i.e.,
tangential force
fdx=12Re[a(x,t)B*fz]=−14μ0AmAmfe−βgsinεN/m2(3.108)
normal force
fdz=−12Re[a(x,t)B*fx]=−14μ0AmAmfe−βgcosεN/m2(3.109)
Multiplying by the area 2pτ of the SC electromagnet,
the electromagnetic thrust
Fdx=−Fmaxsinε(3.110)
the normal repulsive force
Fdz=−Fmaxcosε(3.111)
where the peak force
Fmax=4μ0m1p√2N1pkw1NfpkwfLiτIaIfe−βg(3.112)
Case Study 3.2. Single-Sided Air-Cored LSM
Given are the following design data of a single-sided air-cored LSM with SC excitation winding (Figs 1.17 and 3.5): m1 = 3, p = 2, NfpkwfIf = 700 × 103 A, kw1 = 1.0, Ia = 1000 A, g = 0.1 m, τ = 1.35 m, and Li = 1.07 m. Find:
(a) The maximum force as a function of the number of armature turns 2 ≤ N1p ≤ 20
(b) The electromagnetic thrust Fdx and normal force Fdz as functions of the force angle ∈.

Fig. 3.6. Electromagnetic thrust Fdx and normal force Fdz as functions of the force angle for typical parameters of an air-cored LSM.
Solution
The maximum force for N1p = 2 is
Fmax=4×0.4π×10−6×3×2×√2×2×1.0×700×103×1000.0×1.071.35e−0.1π/135=37,501.4N≈37.5kN
For N1p = 5, Fmax = 93.75 kN; for N1p = 10, Fmax = 187.5 kN; for N1p = 15, Fmax = 281.25 kN; and for N1p = 20, Fmax = 375.0 kN. The “−” sign has been neglected.
The forces Fdx = Fmax sin ∈ and Fdz = Fmax cos ∈ as functions of are plotted in Fig. 3.6.
3.3 Double-Sided LSM with Inner Moving Coil
The analysis of electromagnetic field in a double-sided PM LSM (Fig. 2.24) will be performed on the basis of the following assumptions:
(a) All regions are extended to infinity in the ±x direction.
(b) Magnetic permeability of ferromagnetic core (return path for magnetic flux) tends to infinity.
(c) Isotropic PMs are magnetized in the normal direction (z coordinate) and have zero electric conductivity.
(d) PMs are represented by an equivalent line current density varying periodically with the period of 2τ/ν, where ν = 1, 3, 5, ….
(e) The model is linear.
(f) Armature reaction is negligible.

Fig. 3.7. A layer model of a double-sided PM LSM with inner moving coil (Ia = 0).
A layer model is shown in Fig. 3.7. The armature current is assumed to be zero (Ia = 0), i.e., there is no armature reaction. Thus, the electromagnetic field in the air is described by Laplace’s equation, and in PMs by Poisson equation [77, 228], i.e.,
for −0.5g ≤ z ≤ 0.5g
∂2AI(x,z)∂x2+∂2AI(x,z)∂z2=0(3.113)
for −0.5g + hm ≤ z ≤ 0.5g + hM
∂2AII(x,z)∂x2+∂2AII(x,z)∂z2=−μrecjM(x)(3.114)
where μrec = μ0μrrec is the recoil permeability of PM; AI and AII are magnetic vector potentials in the air and PMs, respectively; and jM(x) is the PM equivalent line current density, which can be written in the following scalar form:
jM(x)=∞∑ν=1,3,…JM4νπsin(ναiπ2)sin(βνx)(3.115)
where ν = 1, 3, 5, … are higher space harmonics, τ is pole pitch, JM is given by eqn (3.83), and
βν=νβ=νπτ(3.116)
See also eqns (3.81) and (3.85) in which ν = 1. Using the method of variable separation, general solutions to eqns (3.113) and (3.114) are
AI=∞∑ν=1,3,…(C1e−βνz+C2eβνz)sin(βνx)(3.117)
AII=∞∑ν=1,3,…[C3e−βνz+C4eβνz+4BrTν2π2sin(βνx)]sin(βνx)(3.118)
On the basis of assumption (b), the following boundary condition can be written,
z=0HI=0z=±0.5gHxI=HxIIandBzI=BzIIz=±(0.5g+hM)HxII=0(3.119)
From the above boundary conditions (3.119), constants C1, C2, C3, and C4 can be found, i.e.,
C1=C2e−βνgC2=4BrTν2π2sin(βνx)(3.120)
×1(e−βνg+1)+1μ0(e2βνhM−1)[μrec(−e−βνg+1)](e2βνhM−1)(3.121)
C3=C4e2βνhM(3.122)
C4=μrec(−e−βνg+1)1e2βνhM−1C2(3.123)
The magnetic flux density components can be found from the definition of the magnetic vector potential B = ∇ × A. For example, the normal component of the magnetic flux density in the middle of the air gap is
BzI(x)=−∂A∂x=−∑∞ν=1,3,…βν(C1e0.5βνg+C2e−0.5βνg)cos(βνx)(3.124)
Eqn (3.124) does not include the armature field (Ia = 0), but only the PM excitation field.
3.4 Variable Reluctance Motors
The variable reluctance LSM, called simply the linear reluctance motor (LRM), does not have any excitation system, so the EMF Ef = 0. The thrust is expressed by eqn (3.44) and is proportional to the input voltage squared V21, the difference Xsd−Xsq between the d- and q-axis synchronous reactances and sin(2δ) where δ is the load angle (between the terminal voltage V1 and the q-axis). Including the stator winding resistance R1, the thrust is
Fdxrel=Pelmvs=m1V212vsXsd−Xsq(XsdXsq+R21)2[(XsdXsq−R21)sin2δ+R1(Xsd+Xsq)cos2δ−R1(Xsd−Xsq)](3.125)
where Pelm is according to eqn (3.38) for Ef = 0.
For the same load, the input current of a reluctance LSM is higher than that of a PM LSM since the EMF induced in the armature winding by the field excitation system is zero — eqns (3.33) and (3.34). Correspondingly, it affects efficiency because of higher power loss dissipated in the armature winding. The thrust can be increased by magnifying the ratio Xsd/Xsq. However, this in turn involves a heavier magnetizing current, resulting in further increase in the input current due to a high reluctance of the magnetic circuit in the q-axis.
3.5 Switched Reluctance Motors
The inductance of a linear switched reluctance motor (Fig. 1.21) can be approximated by the following function (see also eqn 5.9):
L(x)=12(Lmax+Lmin)−12(Lmax−Lmin)cos(πτx)=L0−12(kL−1)Lmaxcosπτx(3.126)
where
L0=12(Lmax+Lmin)(3.127)
kL=LmaxLmin(3.128)
Lmax is the maximum inductance (armature and platen poles are aligned), and Lmin is the minimum inductance (complete misalignment of armature and platen poles).
If the magnetic saturation is negligible (magnetization characteristic is linear), the electromagnetic thrust (in the x-direction) according to eqns (1.11) and (1.13) is
Fdx=dWdx=12I2adL(x)dx=FmaxI2asin(πτx)(3.129)
where the maximum force at Ia = 1 A
Fmax=14πτ(kL−1)Lmin(3.130)
The electromagnetic thrust of a linear switched reluctance motor is directly proportional to the armature current squared I2a and the ratio kL of maximum to minimum inductance, and it is inversely proportional to the pole pitch τ. Eqns (3.129) and (3.130) do not take into account the current waveform shape and current turn-on and turn-off instants.
The thrust changes direction at the aligned position of the armature and the reaction rail poles. If the reaction rail continues past the aligned position, the attractive force between the armature and reaction rail poles produces retarding (braking) force. An accurate current turn-off instant provides elimination of braking force.
Sensitivity analysis of the effect of geometrical parameters on the performance of a linear switched reluctance motor, especially on the thrust profile, is given, e.g., in [9].
Examples
Example 3.1
A single-sided 6-pole, Y-connected PM LSM with surface configuration of PMs is fed with 230 V line-to-line voltage at 50 Hz. The number of turns per phase is N1 = 180, winding factor kw1 = 1, pole pitch τ = 48 mm, armature winding resistance per phase R1 = 1.614 Ω, armature winding leakage reactance per phase X1 = 2.246 Ω, d-axis armature reaction reactance Xad = 2.710 Ω, q-axis armature reaction reactance Xaq = 2.515 Ω, magnetic flux density in the armature teeth is the same as that in core (yoke), i.e., B1t = B1c = 1.468 T, mass of armature teeth m1t = 2.973 kg, mass of armature core (yoke) m1c = 2.473 kg, the magnetic flux of PMs linked with the armature winding under load is Φ = 2.124×10−3 Wb, specific armature core losses δp1/50 = 1.07 W/kg, windage losses ΔPwind = 10 W, mechanical losses in linear bearings ΔPm = 80 W, and losses in PMs ΔPP M = 24.6 W. The armature coils are wound with two (aw = 2) parallel copper conductors AWG20 (0.812 mm diameter). Find the parameters at load angle δ = 12° and steady-state performance characteristics.
Solution
The phase voltage is V1=230/√3=132.8V. The EMF per phase induced in the armature winding
Ef=π√2×50×180×1.0×2.124×10−3=84.95V
Synchronous reactances
Xsd=2.246+2.710=4.956ΩXsq=2.246+2.515=4.761Ω
For δ = 12°, the d- and q-axis armature currents according to eqns (3.33) and (3.34) are
Iad=132.8[4.761×cos(12∘)−1.614×sin(12∘)]−84.95×4.7614.956×4.761+1.6142=6.466AIaq=132.8[1.614×cos(12∘)+4.956×sin(12∘)]−84.95×1.6144.956×4.761+1.6142=7.99A
The total armature current
Ia=√64662+7992=10.8A
The angle between the armature current and the q-axis
ψ=arcsin(6.46610.8)=38.98∘=0.68rad
Armature winding losses
ΔP1w=3×10.82×1.614=511.6W
Losses in armature teeth and core (yoke) according to eqn (2.3),
ΔPFe=1.07×(5050)4/3(1.8×1.4682×2.973+3.0×1.4682×2.473)=29.4W
where kadt = 1.8 and kadc = 3.0. Total losses
ΔP=511.6+29.4+80+10+24.6=655.6W
Electromagnetic power calculated on the basis of eqn (3.38)
Pelm=3[10.8cos(12∘)×84.95+6.466×7.99(4.956−4.761)]=2066.4W
Input power
Pin=Pelm+ΔP1w+ΔPFe=2066.4+511.6+29.4=2607.5W
Output power
Pout=Pin−ΔP=2607.5−655.6=1951.8W
Input apparent power
Sin=3×132.8×10.8=4095.0VA
Power factor cos φ
cosϕ=PinSin=2607.54095.0=0.637;ϕ=arccosϕ=50.45∘
Phase voltage across input terminals of the armature winding calculated according to eqn (3.32),
V1=1cosϕ(Ef+IadXsd+IaqR1)=10.637(84.95+6.466×4.956+7.99×1.614)=132.8V
Linear synchronous speed
vs=2×50×0.048=4.8m/s
Electromagnetic thrust (force in the x-direction)
Fdx=2066.44.8=430.5N
Output power calculated on the basis of electromagnetic power
Pout=Pelm−ΔPm−ΔPwind−ΔPPM2066.4−80.0−10.0−24.6=1951.8W
Useful thrust
Fx=1951.84.8=406.6N
Efficiency
η=1951.82607.5=0.749

Fig. 3.8. Output power Pout, electromagnetic power Pelm, input power Pin, and total losses ΔP plotted against armature current Ia.
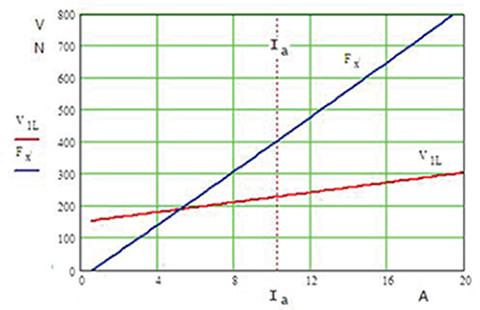
Fig. 3.9. Line voltage V1L and useful thrust Fx plotted against armature current Ia.
Current density in the armature winding
ja=10.82×(π×0.0008122/4=9.93×106A/m2
Line current density (peak value)
Am=3√2180×10.83×0.048=54514A/m

Fig. 3.10. Efficiency η and power factor cos φ plotted against armature current Ia.
EMF constant
kE=Efvs=84.954.8=17.697Vs/m
Force constant
kF=FdxIa=430.510.8=41.881N/A
Performance characteristics as functions of the armature currents are plotted in Figs 3.8, 3.9, and 3.10.
Example 3.2
A single-sided PM LSM has the following resistances and reactances: R1 = 2.8 Ω, X1 = 3.8 Ω, Xad = 4.76 Ω, Xaq = 4.57 Ω. At frequency f = 50 Hz and phase voltage V1 = 220 V, the EMF per phase is Ef = 200 V. The armature windings are Y-connected. The pole pitch is τ = 40 mm. Find the armature current Ia, electromagnetic power Pelm, electromagnetic thrust Fdx, and primary winding losses at zero d-axis armature current.
Solution
Synchronous reactances in the d- and q-axis
Xsd=3.8+4.76=8.56Ω;Xsq=3.8+4.57=8.37Ω
The discriminant of the quadratic equation (3.48) is
Δ=b2−4ac=(−6.165×106)2−4×3.77×106×2.423×106=1.212×106V6/A2
where
a=(V1Xsq)2+(V1R1)2=(220×8.37)2+(220×2.8)2=3.77×106V3/Ab=−2V1EfX2sq=−2×220×200×8.372=−6.165×106V3/Ac=(EfXsq)2−(V1R1)2=(200×8.37)2−(220×2.8)2=2.423×106V3/A
Roots of the second-order equation (3.48)
x1=6.165×106−√1212×1062×3.77×106=0.657x2=6.165×106+√1212×1062×3.77×106=0.978δ1=arccos(x1)=48.94∘δ2=arccos(x2)=11.95∘∘
For δ2 = 11.95°, the armature currents according to eqns (3.33) and (3.34) are
Iad=220[8.37×cos(11.95∘)−2.8×sin(11.95∘)]−200×8.378.56×8.37+2.82=0AIaq=220[2.8×cos(11.95∘∘)+8.56×a(11.95∘)]−200×2.88.56×8.37+2.82=5.44A
The total armature current is torque producing, i.e.,
Ia=√02+5442=5.44A
The angle between the primary current and q-axis must be zero, i.e.,
ψ=arcsin(IadIa)=0o
Electromagnetic power at Iad = 0 is calculated on the basis of eqn (3.38):
Pelm=3[5.44×200+0×5.44(8.56−8.37)]=3265W
Linear synchronous speed
vs=2×50×0.04=4.0m/s
Electromagnetic force at Iad = 0
Fdx=32654.0=816.3N
Primary winding losses at Iad = 0
ΔP1w=3×5.44×2.8=248.8W
Example 3.3
Given below are dimensions of a 400-N, 6-pole, 18-slot, 50-Hz, 3-phase PM LSM:
pole pitch τ = 48.0 mm
effective length of armature stack Li
dimensions of PMs hM = 3.0 mm, wM = 40.0 mm, lM = 96.0 mm
height of armature core h1c = 10.0 mm
height of reaction rail core h2c = 12.0 mm
armature tooth width ct = 8.0 mm
armature tooth height ht = 23.5 mm
armature slot opening b14 = 3.0 mm
air gap (mechanical clearance) g = 1.5 mm
Materials:
Vacodym 510 NdFeB PMs with Br20 = 1.35 T, Hc20 = 1015 kA/m at 20° C, αB = −0.115 %/o°C, αH = −0.4 %/o°C
armature core stacked of M19 silicon steel, thickness 0.35 mm (Fig. 2.2)
solid core of reaction rail made of steel 4340 (Fig. 2.3)
The number of turns per phase is N1 = 180, the coil pitch is equal to the slot pitch (wc = τ), the armature core stacking factor ki = 0.96, the estimated coefficient of PM leakage flux σlM ≈ 1.3, and the exptected temperature of PMs is ϑPM = 50°C. The armature slots are unskewed. The rated armature current is Ia = 11.65 A at ψ = 40.5° = 0.707 rad.
Find the magnetic fluxes Φf, Φg, and Φ according to eqns (3.66), (3.68) and (3.67), including armature reaction.
Solution
The number of slots per pole is Q1 = 18/6 = 3, number of slots per pole per phase q1 = 18/(3×6) = 1, winding distribution factor kd1 = sin(π/2×3)/(1× sin(π/2×3×1) = 1, winding pitch factor kp1 = sin(π×0.048/(2×0.048) = 1, winding factor kw1 = 1 × 1 = 1, slot pitch t1 = 6 × 0.048/18 = 0.016 m, pole shoe width to pole pitch ratio αi = 40/48 = 0.833, form factor of the excitation field kf = (4/π) sin(0.833 × π/2) = 1.23, reaction factor in the d-axis kad = 1/1.23 = 0.813, distance between neighboring surface PMs xM = 48.0 − 40.0 = 8.0 mm.
Remanence of the PM at ϑP M = 50°C according to eqn (2.21)
Br=1.35[1+−0.115100(50−20)]=1.303T
Cooercivity of the PM at ϑP M = 50°C according to eqn (2.22)
Hc=1015[1+−0.4100(50−20)]=893kA/m
Relative recoil magnetic permeability
μrrec=1.3030.4π×10−6×893000=1.161
Air gap magnetic flux density according to eqn (2.20)
Bg=1.3031+μrrec×1.5/3.0=0.8245T
Air gap magnetic flux density including PM leakage flux
Bg=0.824511.3=0.634T
It has been estimated that the PM leakage flux coefficient is σlM ≈ 1.3. Similar value must obtained after calculating the magnetic fluxes. The magnetic flux in the air gap
Φg=αiBgτLi=0.833×0.634×0.048×0.096=0.00243Wb
Magnetic flux density in primary teeth
B1t=Bgt1ctki=0.634×0.0160.008×0.96=1.322T
The corresponding magnetic field intensity read on the magnetization curve B-H of M19 silicon steel is H1t = 477.7 A/m. The relative magnetic permeability of teeth
μrt=1.3220.4π×10−6×477.7=2202
Cross section of a tooth including stacking coefficient ki
St=0.008×0.096×0.96=7.373×10−4m2
Reluctance of a tooth according to eqn (3.54)
ℜt=0.02350.4π×10−6×2202×7.373×10−4=1.152×1041/H
Magnetic voltage drop along the armature tooth
Vμ1t=ΦgℜtQ1=0.002711.152×1043=9.35A
Magnetic flux density in the armature core (yoke)
B1c≈Φg21h1cLiki=0.00243210.01×0.096×0.96=1.321T
The corresponding magnetic field intensity read on the B-H curve of M19 silicon steel is H1c = 475.15 A/m. The relative magnetic permeability of the armature core (yoke)
μr1c=1.3210.4π×10−6×475.15=2212
Cross section of the armature core including the stacking coefficient ki
S1c=0.01×0.096×0.96=9.216×10−4m2
Reluctance of the armature core according to eqn (3.55)
ℜ1c=0.048+0.5×0.010.4π×10−6×2212×9.216×10−4=2.069×1041/H
Magnetic voltage drop along the armature core (yoke)
Vμ1c=12Φgℜ1c=120.00243×2.069×104=25.2A
Magnetic flux density in the reaction rail core
B2c≈Φg2σlM1h2cLi=0.0024321.310.012×0.096=1.374T
The magnetic field intensity corresponding to B2c = 1.374 T is H2c = 726.1 A/m The magnetization curve of solid steel 4340 is plotted in Fig. 2.3.
Relative magnetic permeability of the reaction rail core
μr2c=1.3740.4π×10−6×726.1=514.7
Cross section of the reaction rail
S2c=h2clM=0.012×0.096=1.152×10−3m2
Reluctance of the secondary core according to eqn (3.56)
ℜ2c=0.048+0.5×0.0120.4π×10−6×514.8×1.152×10−3=7.247×1041/H
Magnetic voltage drop along the reaction rail core
Vμ2c=12ΦgσlMℜ2c=120.00243×1.3×7.247×104=114.7A
Reluctance of PM according to eqn (3.52)
ℜM=0.0030.4π×10−6×1.161×0.04×0.096=5.356×1051/H
Magnetic voltage drop across the PM
VμPM=ΦgσlMℜM=0.00243×1.3×5.356×105=1695.8A
Carter’s coefficient according to eqns (2.44) and (2.45)
γ=4π[0.00300015arctan(0.50.00300015)−ln√1+(000300015)2]=0.5587kC=0.0160.016−0.5587×0.0015=1.0553
Air gap cross section
Sg=αiτLi=0.833×0.048×0.096=3.838×10−3m2
Reluctance of the air gap according to eqn (3.53)
ℜg=0.0015×1.05530.4π×10−6×3.838×10−3=3.282×1051/H
Magnetic voltage drop across the air gap
Vμg=Φgℜg=0.00243×3.282×105=799.01/H
Total MMF per pole pair
F=2(Vμg+VμPM+Vμt)+Vμ1c+Vμ2c=2(799.0+1695.8+9.35)+25.2+114.7=5147.2A
Saturation factor of magnetic circuit according to eqn (B.26)
ksat=1+2×9.35+25.2+114.72×799.0=1.099
Reluctance for PM leakage flux (hM < xM) according to eqns (3.57) and (3.59)
GlM≈2×0.4π×10−6(0.52×0.096+0.26×0.04+0.308×0.003)=1.539×10−7HℜlM=11.539×10−7=6.5×1061/H
Reluctance for the air gap leakage flux according to eqn (3.60)
ℜlg=10.4π×10−65+4×0.0015×1.0553/0.0035×0.0015×1.0553/0.00310.096=2.23×1071/H
Constants expressed by eqns (3.71) to 3.74)
A=1+22.23×107(21.152×1043+122.069×104)=1.002B=2×1.002×3.282×105+21.152×1043+122.069×104=6.754×105ΩC=2×5.356×105+127.247×104=1.107×106ΩD=1+45.356×1056.5×106+7.247×1046.5×106=1.341
Equivalent MMF excited by one pole of PM
FM=HChM=893000×0.003=2679A
The d-axis armature reaction MMF according to eqn (3.19)
Fad=0.8133√2180×1.0π×311.65sin(40.5o)=491.1A
Denominator in eqns (3.66), (3.67), and (3.68)
AC+BD=1.002×1.107×106+6.754×105×1.341=2.015×106Ω
Magnetic flux of PMs (per pole pair) according to eqn (3.66)
Φf=22.015×106(2679−491.1−4×491.13.282×1052.23×107)×1.002+22.015×106(2679+491.16.5×1062.23×107)16.5×106×6.754×105=2.73×10−3Wb
Magnetic flux linked with the armature winding according to eqn (3.67)
Φ=22.015×106(2679−491.1−4×491.13.282×1052.23×107)×1.341−22.015×106(2679+491.16.5×1062.23×107)16.5×106×1.107×106=1.92×10−3Wb
Air gap magnetic flux according to eqn (3.68)
Φg=1.92×10−3×1.002+4.×491.1223×107=2.011×10−3Wb
Air gap leakage flux according to eqn (3.69)
Φlg=2.011×10−3−1.92×10−3=9.102×10−5Wb
PM leakage flux according to eqn (3.70)
ΦlM=2.73×10−3−2.011×10−3=7.19×10−4Wb
Coefficient of leakage flux according to eqn (3.76)
σl≈1+ΦlM+ΦlgΦf=1+7.19×10−4+9.102×10−52.73×10−3≈1.3
For Fad = 0 (no armature reaction), magnetic fluxes are Φf = 3.217 × 10−3 Wb, Φg = 2.664 × 10−3 Wb, Φ = 2.660 × 10−3 Wb, Φlg = 4.292 × 10−6 Wb, ΦlM = 5.53 × 10−4 Wb. The coefficient of leakage flux decreases, i.e., σl = 1.173.
If ℜlg → ∞ and ℜlPM → ∞ (no leakage fluxes) and Fad = 0 (no armature reaction), then, according to eqn (3.77)
Φf=Φg=Φ=2×26792(1.152×104/3+5.356×105+3.282×105)+0.5(2.069+7.247)×104=3.008×10−3Wb
Example 3.4
Specifications of a 4-pole, single-sided, PM LSM are given in Tables 3.2 and 3.3, i.e., δ = 8.60, τ = 56 mm, bp = 42 mm, Li = 84 mm, Br = 1.1 T, Hc = 800 000 A/m, Bmg = 0.5338 T, N1 = 560, kw1 = 1.0, g = 2.5 mm, kC = 1.2, hM = 4 mm, Ia = 2.0, X1 = 1.0397 Ω, Xad = Xaq = 1.1323 Ω. The input frequency is f = 5 Hz, and input line-to-line voltage is V1L = 50 V.
Find the electromagnetic thrust Fdx using eqns (3.98) and (3.40).
Solution
The relative recoil magnetic permeability is μrrec = 0.5338/(0.4π × 10−6 × 800 000) = 1.094, synchronous speed vs = 2 × 5.0 × 0.056 = 0.56 m/s, phase voltage V1=50/√3=28.87, pole shoe width to pole pitch ratio αi = 42/56 = 0.75 and the constant according to eqn (3.81) is β = π/0.056 = 56.1 1/m.
The equivalent edge line current density according to eqn (3.83)
JM=1.10.4π×10−6×1.094=800000A/m
The line current density according to eqn (3.80)
Am=3√2×560×1.0×2.04×0.056=21213A/m
The electromagnetic thrust Fdx according to eqn (3.98)
Fdx=4π4×0.084×1.1×21213sin(π0.752)×tanh(56.1×0.040)1.094sinh(56.1×0.0025×1.2)+tanh(56.1×0.040)sinh(56.1×0.0025×1.2)=278.0N
The form factor of the excitation field as given by eqn (3.10)
kf=4πsin(0.75π2)=1.176
The amplitude of the first harmonic of the magnetic flux density in the air gap
Bmg1=1.176×0.5338=0.628T
The magnetic flux
Φf=2π0.056×0.084×0.628=1.88×10−3Wb
The EMF
Ef=π√2×5.0×560×1.0×1.88×10−3=23.4V
Synchronous reactances
Xsd=1.0397+1.1323=2.172ΩXsq=1.0397+1.1323=2.172Ω
The electromagnetic thrust Fdx according to eqn (3.41)
Fdx=30.56[28.87×23.42.172sin(8.60)+28.8722(12.172−12.172)sin(2×8.60)]=249N
The thrust Fdx = 278 N given by eqn (3.98) is greater than the thrust Fdx = 249 N given by eqn (3.41).
Example 3.5
A linear switched reluctance motor has the following parameters: number of armature turns per phase N = 180, air gap between the armature core and reaction rail at aligned position g = 0.8 mm, width of armature pole equal to the reaction rail pole bp = 12 mm, pole pitch τ = 32 mm, width of armature stack Li = 40, mm and height of the reaction rail pole hrlp = 8 mm.
Find approximate distribution of the inductance and electromagnetic thrust Fdx along the pole pitch for armature currents Ia = 5, 10 and 15 A.
Assumption: Magnetic saturation, leakage and fringing fluxes have been neglected.
Solution
Air gap reluctance in aligned position
ℜga=2gμ0bpLi=2×0.00080.4π×10−6×0.012×0.04=2.653×1061/H
Air gap reluctance in unaligned position
ℜgu=2(g+hrlp)μ0bpLi=2(0.0008+0.008)0.4π×10−6×0.012×0.04=29.18×1061/H
Maximum inductance (aligned position)
Lmax=1ℜgaN2=12.653×1061802=0.0122H
Minimum inductance (unaligned position)
Lmin=1ℜguN2=129.18×1061802=0.0011H
Maximum-to-minimum inductance ratio according to eqn (3.128)
kL=0.01220.0011=11
Constant value of inductance according to eqn (3.127)
L0=12(0.0122+0.0011)=0.0067H
Variation of inductance with pole pitch according to eqn (3.126) is shown in Fig. 3.11. Maximum electromagnetic thrust at Ia = 1 A according to eqn (3.130)
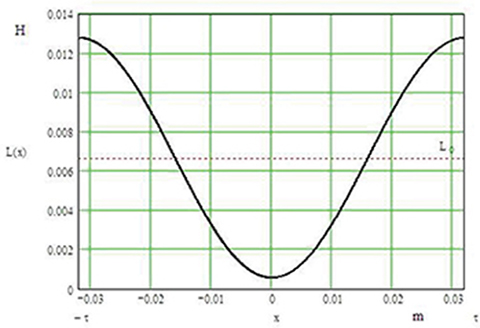
Fig. 3.11. Variation of inductance with armature position.
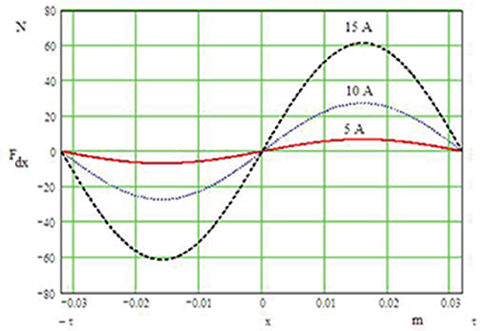
Fig. 3.12. Variation of electromagnetic thrust with armature position.
Fmax=14π0.0320.0011=0.273N
Variation of electromagnetic thrust with current and pole pitch according to eqn (3.126) is shown in Fig. 3.12. For Ia = 5 A, the thrust at 0.5τ = 16 mm is Fdx = 6.813 N; for Ia = 10 A, the thrust at 0.5τ = 16 mm is Fdx = 27.25 N; and for Ia = 15 A, the thrust at 0.5τ = 16 mm is Fdx = 61.32 N.
The presented method of approximate calculation of inductance and electromagnetic thrust does not include magnetic saturation, fringing and leakage flux, and can be used only for very rough estimation of the performance of an SR linear motor. Fringing and leakage fluxes can be included by using field plotting or dividing the magnetic field into simple solids as shown in Appendix B.