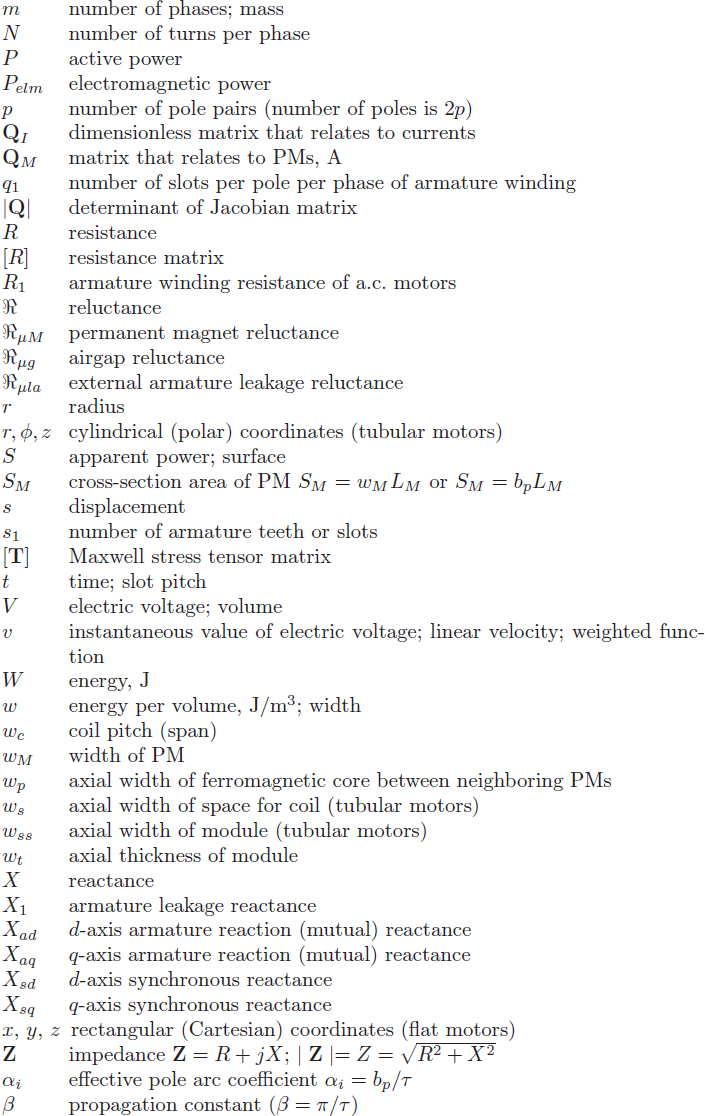
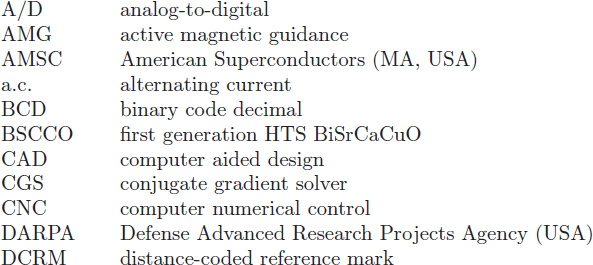
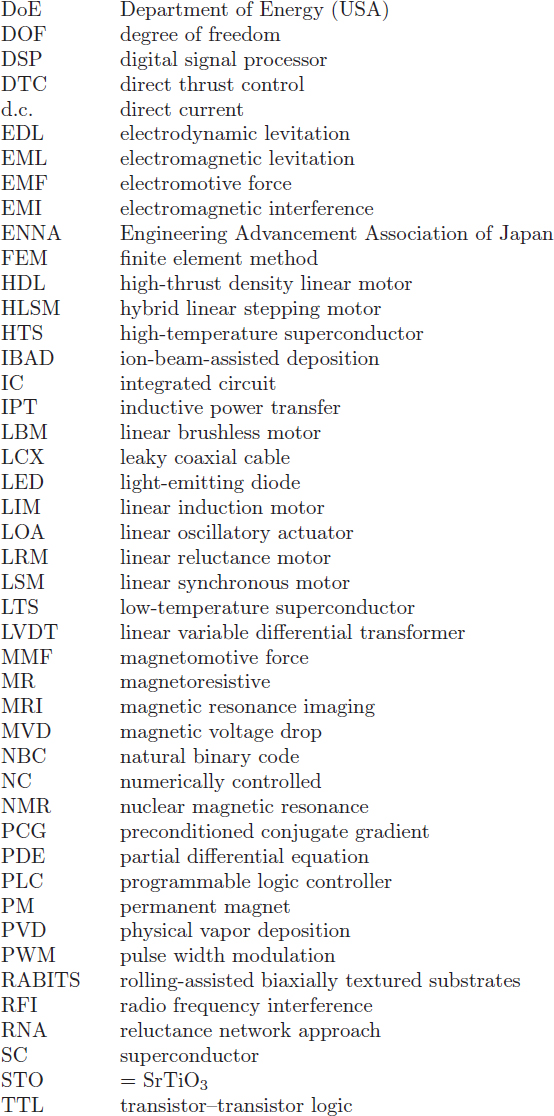
 Symbols and Abbreviations
by Bronislaw Tomczuk, Zbigniew J. Piech, Jacek F. Gieras
Linear Synchronous Motors, 2nd Edition
Symbols and Abbreviations
by Bronislaw Tomczuk, Zbigniew J. Piech, Jacek F. Gieras
Linear Synchronous Motors, 2nd Edition
- Cover
- Title Page
- Copyright Page
- Contents
- Preface to the 2nd Edition
- About the Authors
- 1 Topologies and Selection
- 2 Materials and Construction
- 2.1 Materials
- 2.2 Laminated Ferromagnetic Cores
- 2.3 Permanent Magnets
- 2.4 Conductors
- 2.5 Insulation Materials
- 2.6 Principles of Superconductivity
- 2.7 Superconducting Wires.
- 2.8 Laminated Stacks
- 2.9 Armature Windings of Slotted Cores
- 2.10 Slotless Armature Systems.
- 2.11 Electromagnetic Excitation Systems
- 2.12 Permanent Magnet Excitation Systems
- 2.13 Superconducting Excitation Systems
- 2.14 Hybrid Linear Stepping Motors
- Examples
- 3 Theory of Linear Synchronous Motors
- 4 FEM Analysis
- 5 Hybrid and Special Linear Permanent Magnet Motors
- 6 Motion Control
- 7 Sensors
- 8 High-Speed Maglev Transport
- 8.1 Electromagnetic and Electrodynamic Levitation
- 8.2 Transrapid System (Germany)
- 8.3 Yamanashi Maglev Test Line in Japan
- 8.3.1 Background
- 8.3.2 Location of Yamanashi Maglev Test Line
- 8.3.3 Principle of Operation
- 8.3.4 Guideway
- 8.3.5 Vehicle
- 8.3.6 Superconducting Electromagnet
- 8.3.7 Power Conversion Substation
- 8.3.8 Brakes
- 8.3.9 Boarding System
- 8.3.10 Control System
- 8.3.11 Communication System
- 8.3.12 Experiments
- 8.3.13 History of Superconducting Maglev Transportation Technology in Japan
- 8.4 American Urban Maglev
- 8.5 Swissmetro
- 8.6 Marine Express
- Examples
- 9 Building and Factory Transportation Systems
- 10 Industrial Automation Systems
- 10.1 Automation of Manufacturing Processes
- 10.2 Ball Lead Screws
- 10.3 Linear Positioning Stages
- 10.4 Gantry Robots
- 10.5 Material Handling
- 10.6 Machining Processes
- 10.7 Welding and Thermal Cutting
- 10.8 Surface Treatment and Finishing
- 10.9 2D Orientation of Plastic Films
- 10.10 Testing
- 10.11 Industrial Laser Applications
- Examples
- Appendix A Magnetic Circuits with Permanent Magnets
- Appendix B Calculations of Permeances
- Appendix C Performance Calculations for PM LSMs
- Appendix D Field-Network Simulation of Dynamic Characteristics of PM LSMs
- Symbols and Abbreviations
- References
- Patents
- Index






-
No Comment
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.