2.15. Statistical Methods
Many attacks on cryptosystems involve statistical analysis of ciphertexts and also of data collected from the victim’s machine during one or more private-key operations. For a proper understanding of these analysis techniques, one requires some knowledge of statistics and random variables. In this section, we provide a quick overview of some statistical gadgets. We make the assumption that the reader is already familiar with the elementary notion of probability. We denote the probability of an event E by Pr(E).
2.15.1. Random Variables and Their Probability Distributions
An experiment whose outcome is random is referred to as a random experiment. The set of all possible outcomes of a random experiment is called the sample space of the experiment. For example, the outcomes of tossing a coin can be mapped to the set {H, T} with H and T standing respectively for head and tail. It is convenient to assign numerical values to the outcomes of a random experiment. Identifying head with 0 and tail with 1, one can view coin tossing as a random experiment with sample space {0, 1}. Some other random experiments include throwing a die (with sample space {1, 2, 3, 4, 5, 6}), the life of an electric bulb (with sample space ![]() , the set of all non-negative real numbers), and so on. Unless otherwise specified, we henceforth assume that sample spaces are subsets of
, the set of all non-negative real numbers), and so on. Unless otherwise specified, we henceforth assume that sample spaces are subsets of ![]() .
.
A random variable is a variable which can assume (all and only) the values from a (given) sample space.
A discrete random variable can assume only countably many values, that is, the sample space SX of a discrete random variable X either is finite or has a bijection with ![]() , that is, we can enumerate the elements of SX as x1, x2, x3, . . ..
, that is, we can enumerate the elements of SX as x1, x2, x3, . . ..
The probability distribution function or the probability mass function
fX : SX → [0, 1]
of a discrete random variable X assigns to each x in the sample space SX of X the probability of the occurrence of the value x in a random experiment.[21] We have
[21] [a, b] is the closed interval consisting of all real numbers u satisfying a ≤ u ≤ b. Similarly, the open interval (a, b) is the set of all real values u satisfying a < u < b. In order to make a distinction between the open interval (a, b) and the ordered pair (a, b), many—mostly Europeans—use the notation ]a, b[ for denoting open intervals.
![]()
A continuous random variable assumes uncountable number of values, that is, the sample space SX of a continuous random variable X cannot be in bijective correspondence with a subset of ![]() . Typically SX is an interval [a, b] or (a, b) with –∞ ≤ a < b ≤ +∞.
. Typically SX is an interval [a, b] or (a, b) with –∞ ≤ a < b ≤ +∞.
One does not assign individual probabilities Pr(X = x) to a value assumed by a continuous random variable X.[22] The probabilistic behaviour of X is in this case described by the probability density function
[22] More correctly, Pr(X = x) = 0 for each
.
![]()
with the implication that the probability that X occurs in the interval [c, d] (or (c, d)) is given by the integral
![]()
that is, by the area between the x-axis, the curve fX(x) and the vertical lines x = c and x = d. We have
![]()
It is sometimes useful to set fX(x) :=0 for ![]() , so that fX is defined on the entire real line
, so that fX is defined on the entire real line ![]() .
.
The cumulative probability distribution ![]() of a random variable X (discrete or continuous) is the function FX (x) := Pr(X ≤ x) for all
of a random variable X (discrete or continuous) is the function FX (x) := Pr(X ≤ x) for all ![]() . If X is continuous, we have
. If X is continuous, we have
![]()
which implies that
![]()
2.15.2. Operations on Random Variables
Let X and Y be discrete random variables. The joint probability distribution of X, Y refers to a random variable Z with SZ = SX × SY. For z = (x, y), the probability of Z = z is denoted by fZ(z) = Pr(Z = z) = Pr(X = x, Y = y). The probability Pr(X = x, Y = y) stands for the probability that X = x and Y = y. The random variables X and Y are called independent, if
Pr(X = x, Y = y) = Pr(X = x) Pr(Y = y)
for all x, y.
Example 2.36.
For continuous random variables X and Y, the joint distribution is defined by the probability density function fX,Y (x, y) and the cumulative distribution is obtained by the double integral
![]()
X and Y are independent, if fX,Y (x, y) = fX(x)fY (y) for all x, y. In this case, we also have FX,Y (c, d) = FX(c)FY (d) for all c, d.
Now, we define arithmetic operations on random variables. First, let X and Y be discrete random variables. The sum X + Y is defined to be a random variable U which assumes the values u = x + y for ![]() and
and ![]() with probability
with probability
![]()
The product XY of X and Y is defined to be a random variable V which assumes the values v = xy for ![]() and
and ![]() with probability
with probability
![]()
For ![]() , the random variable W = αX assumes the values w = αx for
, the random variable W = αX assumes the values w = αx for ![]() with probability
with probability
fW(w) = Pr(W = αx) = Pr(X = x) = fX(x).
Example 2.37.
|
Let us consider the random variables X and Y of Example 2.36. For the sake of brevity, we denote Pr(X = x, Y = y) by Pxy. The distributions of U = X + Y in the two cases are as follows:
|
Now, let us consider continuous random variables X and Y. In this case, it is easier to define first the cumulative density functions of U = X + Y, V = XY and W = αX and then the probability density functions by taking derivatives:

One can easily generalize sums and products to an arbitrary finite number of random variables. More generally, if X1, . . . , Xn are random variables and ![]() , one can talk about the probability distribution or density function of the random variable g(X1, . . . , Xn). (See Exercise 2.163.)
, one can talk about the probability distribution or density function of the random variable g(X1, . . . , Xn). (See Exercise 2.163.)
Now, we introduce the important concept of conditional probability. Let X and Y be two random variables. To start with, suppose that they are discrete. We denote by f(x, y) = Pr(X = x, Y = y) the joint probability distribution function of X, Y. For ![]() with Pr(Y = y) > 0, we define the conditional probability of X = x given Y = y as:
with Pr(Y = y) > 0, we define the conditional probability of X = x given Y = y as:
![]()
For a fixed ![]() , the probabilities fX|y(x),
, the probabilities fX|y(x), ![]() , constitute the probability distribution function of the random variable X|y (X given Y = y). If X and Y are independent, f(x, y) = fX(x)fY (y) and so fX|y(x) = fX(x) for all
, constitute the probability distribution function of the random variable X|y (X given Y = y). If X and Y are independent, f(x, y) = fX(x)fY (y) and so fX|y(x) = fX(x) for all ![]() , that is, the random variables X and X|y have the same probability distribution. This is expected, because in this case the probability of X = x does not depend on whatever value y the variable Y takes.
, that is, the random variables X and X|y have the same probability distribution. This is expected, because in this case the probability of X = x does not depend on whatever value y the variable Y takes.
If X and Y are continuous random variables with joint density f(x, y) and ![]() , the conditional probability density function of X|y (X given Y = y) is defined by
, the conditional probability density function of X|y (X given Y = y) is defined by
![]()
Again if X and Y are independent, we have fX|y(x) = fX(x) for all x, y.
For a fixed ![]() , one can likewise define the conditional probabilities fY|x (y) := f(x, y)/fX (x) for all
, one can likewise define the conditional probabilities fY|x (y) := f(x, y)/fX (x) for all ![]() .
.
Let X and Y be discrete random variables with joint distribution f(x, y). Also let Γ ⊆ SX and Δ ⊆ SY. One defines the probability fX(Γ) as:
![]()
The joint probability f(Γ, Δ), is defined as:
![]()
If Γ = {x} is a singleton, we prefer to write f(x, Δ) instead of f({x}, Δ). Similarly, f(Γ, y) stands for f (Γ,{y}). We also define the conditional distributions:

We abbreviate fX|Δ (Γ) as Pr(Γ|Δ) and fY|Γ (Δ) as Pr(Δ|Γ).
Theorem 2.64. Bayes rule
|
Let X, Y be discrete random variables and Δ ⊆ SY with fY (Δ) > 0. Also let Γ1,..., Γn form a partition of SX with fX (Γi) > 0 for all i = 1, . . . , n. Then we have:
that is, in terms of probability:
Proof Pr(Γi, Δ) = Pr(Δ|Γi) Pr(Γi) = Pr(Γi|Δ) Pr(Δ). So it is sufficient to show that Pr(Δ) equals the sum in the denominator. The event Δ is the union of the pairwise disjoint events (Γj, Δ), j = 1,..., n, and so |

The Bayes rule relates the a priori probabilities Pr(Γj) and Pr(Δ|Γj) to the a posteriori probabilities Pr(Γi|Δ). The following example demonstrates this terminology.
Example 2.38.
|
Consider the random experiment of Example 2.36(2). Take Γj := {j} for
The a posteriori probability Pr(Γ1|Δ) that the first ball was obtained in the first draw given that the ball obtained in the second draw is the second or the third one is calculated using the Bayes rule as:
One can similarly calculate |

2.15.3. Expectation, Variance and Correlation
Let X be a random variable. The expectation E(X) of X is defined as follows:

E(X) is also called the (arithmetic) mean or average of X. One uses the alternative symbols μX and ![]() to denote E(X). More generally, let X1, . . . , Xn be n random variables with joint probability distribution/density function f(x1, . . . , xn). Also let
to denote E(X). More generally, let X1, . . . , Xn be n random variables with joint probability distribution/density function f(x1, . . . , xn). Also let ![]() . We define the following expectations:
. We define the following expectations:
X is discrete:
![]()
X is continuous:
Let g(X) and h(Y) be real polynomial functions of the random variables X and Y and let ![]() . Then
. Then
| E(g(X) + h(Y)) | = | E(g(X)) + E(h(Y)), |
| E(g(X)h(Y)) | = | E(g(X)) E(h(Y)) if X and Y are independent, |
| E(αg(X)) | = | αE(g(X)). |
Let us derive the sum and product formulas for discrete variables X and Y.

If X and Y are independent, then

The variance Var(X) of a random variable X is defined as
Var (X) := E[(X – E(X))2].
From the observation that E[(X – E(X))2] = E[X2 – 2 E(X)X + [E(X)]2] = E(X2) – 2 E(X) E(X) + [E(X)]2, we derive the computational formula:
Var (X) = E[X2] – [E(X)]2.
Var(X) is a measure of how the values of X are dispersed about the mean E(X) and is always a non-negative quantity. The (non-negative) square root of Var(X) is called the standard deviation σX of X:
![]()
The following formulas can be easily verified:
| Var(X + α) | = | Var(X). |
| Var(αX) | = | α2 Var(X). |
| Var(X + Y) | = | Var(X) + Var(Y) + 2 Cov(X, Y), |
where ![]() and where the covariance Cov(X, Y) of X and Y is defined as:
and where the covariance Cov(X, Y) of X and Y is defined as:
Cov(X, Y) := E[(X – E(X))(Y – E(Y))] = E(XY) – E(X) E(Y).
Normalized covariance is a measure of correlation between the two random variables X and Y. More precisely, the correlation coefficient ρX,Y is defined as:
![]()
If X and Y are independent, E(XY) = E(X) E(Y) so that Cov(X, Y) = 0 and so ρX,Y = 0. The converse of this is, however, not true, that is, ρX,Y = 0 does not necessarily imply that X and Y are independent. ρX,Y is a real value in the interval [–1, 1] and is a measure of linear relationship between X and Y. If larger (resp. smaller) values of X are (in general) associated with larger (resp. smaller) values of Y, then ρX,Y is positive. On the other hand, if larger (resp. smaller) values of X are (in general) associated with smaller (resp. larger) values of Y, then ρX,Y is negative.
Example 2.39.
|
Once again consider the drawing of two balls from an urn containing three balls labelled {1, 2, 3} (Examples 2.36, 2.37 and 2.38). Look at the second case (drawing without replacement). We use the shorthand notation Pxy for Pr(X = x, Y = y). The individual probability distributions of X and Y can be obtained from the joint distribution as follows:
Thus E(X) = 1 × (1/3) + 2 × (1/3) + 3 × (1/3) = 2. Similarly, E(Y) = 2. Therefore, E(X + Y) = E(X) + E(Y) = 4. This can also be verified by direct calculations: E(X + Y) = 3 × (1/3) + 4 × (1/3) + 5 × (1/3) = 4. E(X2) = E(Y2) = 12 × (1/3) + 22 × (1/3) + 32 × (1/3) = 14/3 and Var(X) = Var(Y) = (14/3) – 22 = 2/3. The probability distribution for XY is
so that E(XY) = 2 × (1/3) + 3 × (1/3) + 6 × (1/3) = 11/3. Therefore, Cov(XY) = E(XY) – E(X) E(Y) = (11/3) – 2 × 2 = –1/3, that is,
The negative correlation between X and Y is expected. If X = 1 (small), Y takes bigger values (2, 3). On the other hand, if X = 3 (large), Y assumes smaller values (1, 2). Of course, the correlation is not perfect, since for X = 2 the values of Y can be smaller (1) or larger (3). So, we should feel happy to see a not-so-negative correlation of –1/2 between X and Y. |
2.15.4. Some Famous Probability Distributions
Some probability distributions that occur frequently in statistical theory and in practice are described now. Some other useful probability distributions are considered in the Exercises 2.169, 2.170 and 2.171.
Uniform distribution
A discrete uniform random variable U has sample space SU := {x1, . . . , xn} and probability distribution
![]()
A continuous uniform random variable U has sample space SU and probability density function
![]()
where A > 0 is the size[23] of SU. For example, if SU is the real interval [a, b] for a < b, we have
[23] If
, “size” means length. If
or
, “size” refers to area or volume respectively. We assume that the size of SU is “measurable”.
![]()
In this case, we have
| E(U) = (a + b)/2 | and | Var(U) = (b – a)2/12. |
Uniform random variables often occur naturally. For example, if we throw an unbiased die, the six possible outcomes (1 through 6) are equally likely, that is, each possible outcome has the probability 1/6. Similarly, if a real number is chosen randomly in the interval [0, 1], we have a continuous uniform random variable. The built-in C library call rand() (pretends to) return an integer between 0 and 231 – 1, each with equal probability (namely, 2–31).
Bernoulli distribution
The Bernoulli random variable B = B(n, p) is a discrete random variable characterized by two parameters ![]() and
and ![]() , where p stands for the probability of a certain event E and n represents the number of (independent) trials. It is assumed that the probability of E remains constant (namely, p) in each of the n trials. The sample space SB = {0, 1, . . . , n} comprises the (exact) numbers of occurrences of E in the n trials. B has the probability distribution
, where p stands for the probability of a certain event E and n represents the number of (independent) trials. It is assumed that the probability of E remains constant (namely, p) in each of the n trials. The sample space SB = {0, 1, . . . , n} comprises the (exact) numbers of occurrences of E in the n trials. B has the probability distribution
![]()
as follows from simple combinatorial arguments. The mean and variance of B are:
| E(B) = np | and | Var(B) = np(1 – p). |
The Bernoulli distribution is also called the binomial distribution.
Normal distribution
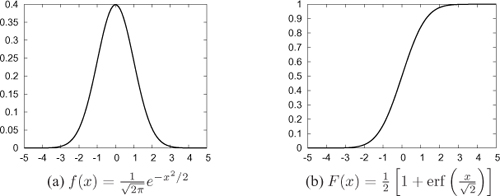
The normal random variable or the Gaussian random variable N = N (μ, σ2) is a continuous random variable characterized by two real parameters μ and σ with σ > 0. The density function of N is
![]()
The cumulative distribution for N can be expressed in terms of the error function erf():
![]()
The error function does not have a known closed-form expression. Figure 2.3 shows the curves for fN (x) and FN (x) for the parameter values μ = 0 and σ = 1 (in this case, N is called the standard normal variable).
Some statistical properties of N are:
| E(N) = μ | and | Var(N) = σ2. |
The curve fN (x) is symmetric about x = μ. Most of the area under the curve is concentrated in the region μ – 3σ ≤ x ≤ μ + 3σ. More precisely:
| Pr(μ – σ ≤ X ≤ μ + σ) | ≈ | 0.68, |
| Pr(μ – 2σ ≤ X ≤ μ + 2σ) | ≈ | 0.95, |
| Pr(μ – 3σ ≤ X ≤ μ + 3σ) | ≈ | 0.997. |
Many distributions occurring in practice (and in nature) approximately follow normal distributions. For example, the height of (adult) people in a given community is roughly normally distributed. Of course, the height of a person cannot be negative, whereas a normal random variable may assume negative values. But, in practice, the probability that such an approximating normal variable assumes a negative value is typically negligibly low.
2.15.5. Sample Mean, Variation and Correlation
In practice, we often do not know a priori the probability distribution or density function of a random variable X. In some cases, we do not have the complete data, whereas in some other cases we need an infinite amount of data to obtain the actual probability distribution of a random variable. For example, let X represent the life of an electric bulb manufactured by a given company in the last ten years. Even though there are only finitely many such bulbs and even if we assume that it is possible to trace the working of every such bulb, we have to wait until all these bulbs burn out, before we know the actual distribution of X. That is certainly impractical. On the contrary, if we have data on the life-times of some sample bulbs, we can approximate the properties of X by those of the samples.
Suppose that S := (x1, x2, . . . , xn) is a sample of size n. We assume that all xi are real numbers. We define the following quantities for S:

Here ![]() is the mean of the collection
is the mean of the collection ![]() .
.
If T := (y1, y2, . . . , ym) is another sample (of real numbers), the (linear) relationship between S and T is measured by the following quantities:

Here ![]() is the mean of the collection ST := (xiyj | i = 1, . . . , n, j = 1, . . . , m).
is the mean of the collection ST := (xiyj | i = 1, . . . , n, j = 1, . . . , m).
An important property of the normal distribution is the following:
Theorem 2.65. Central limit theorem
|
Let X be any random variable with mean μ and variance σ2 and let |
Exercise Set 2.15
| 2.162 | An urn contains n1 red balls and n2 black balls. We draw k balls sequentially and randomly from the urn, where 1 ≤ k ≤ n1 + n2.
| ||||||||||||||||||
| 2.163 | Let X and Y be the random variables of Example 2.36. For each of the two cases, calculate the probability distribution functions, expectations and variances of the following random variables:
| ||||||||||||||||||
| 2.164 | Let X and Y be continuous random variables, g(X) and h(Y) non-constant real polynomials and α, β,
| ||||||||||||||||||
| 2.165 | Let X be a random variable and Y := αX + β for some α, | ||||||||||||||||||
| 2.166 |
| ||||||||||||||||||
| 2.167 | Let X and Y be continuous random variables whose joint distribution is the uniform distribution in the triangle 0 ≤ X ≤ Y ≤ 1.
| ||||||||||||||||||
| 2.168 | Let X, Y, Z be random variables. Show that:
| ||||||||||||||||||
| 2.169 | Geometric distribution Assume that in each trial of an experiment, an event E has a constant probability p of occurrence. Let G = G(p) denote the random variable with
| ||||||||||||||||||
| 2.170 | Poisson distribution Let P = P (λ) be the discrete random variable with | ||||||||||||||||||
| 2.171 | Exponential distribution
Show that the exponential variable X of Part (a) is memoryless. | ||||||||||||||||||
| 2.172 | The birthday paradox Let S be a finite set of cardinality n.
|