
Chapter 8
Resource Allocation
8.1 Introduction
In a distributed system mutual exclusion is often necessary for accessing shared resources such as data. For example, consider a table that is replicated on multiple sites. Assume that operations on the table can be issued concurrently. For their correctness, we require that all operations appear atomic in the sense that the effect of the operations must appear indivisible to the user. For example, if an update operation requires changes to two fields, x and y, then another operation should not read the old value of x and the new value of y. Observe that in a distributed system, there is no shared memory and therefore one could not use shared objects such as semaphores to implement the mutual exclusion.
Mutual exclusion is one of the most studied topics in distributed systems. It reveals many important issues in distributed algorithms such as safety and liveness properties. We will study three classes of algorithms—timestamp-based algorithms, token-based algorithms and quorum-based algorithms. The timestamp-based algorithms resolve conflict in use of resources based on timestamps assigned to requests of resources. The token-based algorithms use auxiliary resources such as tokens to resolve the conflicts. The quorum-based algorithms use a subset of processes to get permission for accessing the shared resource. All algorithms in this chapter assume that there are no faults in the distributed system, that is, that processors and communication links are reliable.
8.2 Specification of the Mutual Exclusion Problem
Let a system consist of a fixed number of processes and a shared resource called the critical section. An example of a critical section is the operation performed on the replicated table introduced earlier. The algorithm to coordinate access to the critical section must satisfy the following properties:
Safety: Two processes should not have permission to use the critical section simultaneously.
Liveness: Every request for the critical section is eventually granted.
Fairness: Different requests must be granted in the order they are made.
We can abstract this problem as implementation of a lock in a distributed environment. The interface Lock is as follows:
public interface Lock extends MsgHandler {
public void requestCS (); //may block
public void releaseCS ();
}
Any lock implementation in a distributed environment will also have to handle messages that are used by the algorithm for locking. For this we use the interface MsgHandler shown below.
import java. io . *;
public interface MsgHandler {
public void handleMsg (Msg m, int srcId, String tag);
public Msg receiveMsg (int fromId) throws IOException ;
}
Any implementation of the lock can be exercised by the program shown in Figure 8.1. Line 8 creates a Linker that links all the processes in the system. After instantiating a lock implementation at lines 10-17, we start separate threads to listen for messages from all the other processes at lines 18-20. The class ListenerThread is shown in Figure 8.2. A ListenerThread is passed a MsgHandler on its construction. It makes a blocking receiveMsg call at line 12, and on receiving a message gives it to the MsgHandler at line 13.
Most of our distributed programs in this book will extend the class Process shown in Figure 8.3. This will allow processes to have access to its identifier myId, the total number of processes N, and simple send and receive routines. The method handleMsg is empty, and any class that extends Process is expected to override this method.

Figure 8.1: Testing a lock implementation
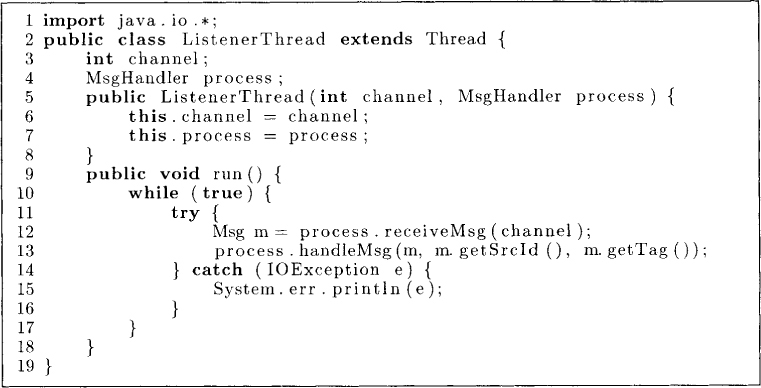
Figure 8.2: ListenerThread
8.3 Centralized Algorithm
There are many algorithms for mutual exclusion in a distributed system. However, the least expensive algorithm for the mutual exclusion is the centralized algorithm shown in Figure 8.4. If we are required to satisfy just the safety and liveness properties, then this simple queue-based algorithm works. One of the processes is designated as the leader (or the coordinator) for the critical section. The variable haveToken is true for the process that has access to the critical section. Any process that wants to enter the critical section sends a request message to the leader. The leader simply puts these requests in the pendingQ in the order it receives them. It also grants permission to the process that is at the head of the queue by sending an okay message. When a process has finished executing its critical section, it sends the release message to the leader. On receiving a release message, the leader sends the okay message to the next process in its pendingQ if the queue is nonempty. Otherwise, the leader sets haveToken to true.
The centralized algorithm does not satisfy the notion of fairness, which says that requests should be granted in the order they are made and not in the order they are received. Assume that the process Pi makes a request for the shared resource to the leader process 4. After making the request, Pi sends a message to the process Pj. Now, Pj sends a request to Pk that reaches earlier than the request made by the process Pi. This example shows that it is possible for the order in which requests are received by the leader process to be different from the order in which they are made. The modification of the algorithm to ensure fairness is left as an exercise (see Problem 8.1).

Figure 8.3: Process.java
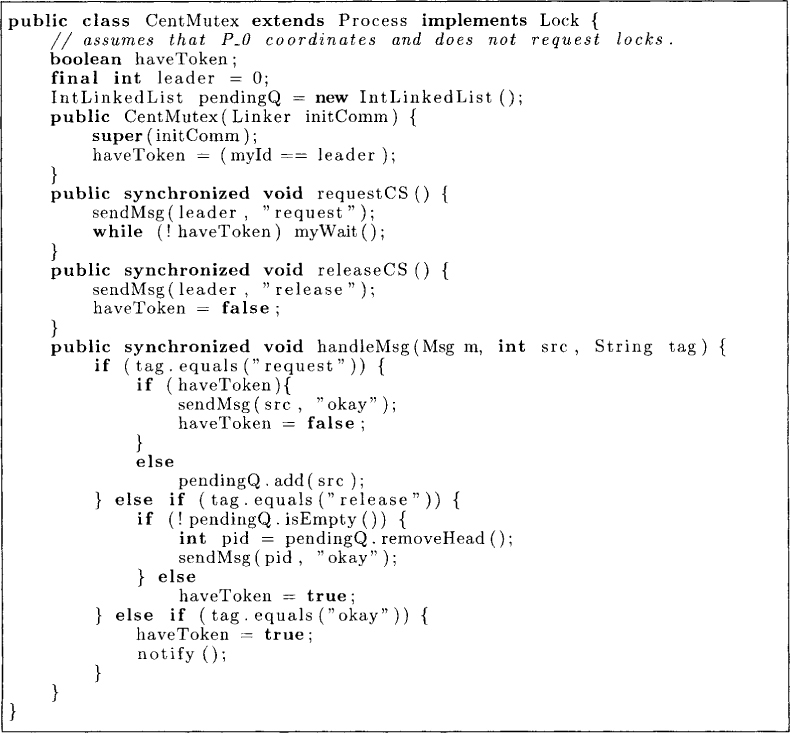
Figure 8.4: A centralized mutual exclusion algorithm
8.4 Lamport’s Algorithm
In Lamport’s algorithm each process maintains a logical clock (used for timestamps) and a queue (used for storing requests for the critical section). The algorithm ensures that processes enter the critical section in the order of timestamps of their requests. It assumes FIFO ordering of messages. The rules of the algorithm are as follows:
• To request the critical section, a process sends a timestamped message to all other processes and adds a timestamped request to the queue.
• On receiving a request message, the request and its timestamp are stored in the queue and a timestamped acknowledgment is sent back.
• To release the critical section, a process sends a release message to all other processes.
• On receiving a release message, the corresponding request is deleted from the queue.
• A process determines that it can access the critical section if and only if (1) it has a request in the queue with timestamp t, (2) t is less than all other requests in the queue, and (3) it has received a message from every other process with timestamp greater than t (the request acknowledgments ensure this).
Figure 8.5 gives an implementation of this algorithm in Java. In this version, every process maintains two vectors. These two vectors simulate the queue used in the informal description given earlier. These vectors are interpreted at process Pi as follows:
q[j] : the timestamp of the request by process Pj. The value Symbols. infinity signifies that Pi does not have any record of outstanding request by process Pj.
v[j]: the timestamp of the last message seen from Pj if j ≠ i. The component s.v[i] represents the value of the logical clock in state s. Thus the vector v is simply the direct-dependency clock.
To request the critical section (method requestCS), Pi simply records its clock in q[i]. Because all other processes also maintain this information, “request” messages are sent to all processes indicating the new value of q[i]. It then simply waits for the condition okayCS to become true.
To release the critical section (method releaseCS), Pi simply resets q[i] to ∞ and sends “release” messages to all processes. Finally, we also require processes to acknowledge any request message as shown in the method handleMsg. Note that every message is timestamped and when it is received, the vector v is updated according to the direct-dependency clock rules as discussed in Chapter 7.
Process Pi has permission to access the critical section when there is a request from Pi with its timestamp less than all other requests and Pi has received a message from every other process with a timestamp greater than the timestamp of its own request. Since two requests may have identical timestamps, we extend the set of timestamps to a total order using process identifiers as discussed in Chapter 7. Thus, if two requests have the same timestamp, then the request by the process with the smaller process number is considered smaller. Formally, Pi can enter the critical section if
∀j : j ≠ i : (q[i], i) < (v([j, j) ∧ (q[i, i) < (q[j], j)
This condition is checked in the method okayCS.
Lamport’s algorithm requires 3(N – 1) messages per invocation of the critical section: N – 1 request messages, N – 1 acknowledgment messages, and N – 1 release messages. There is a time delay of two serial messages to get permission for the critical section—a request message followed by an acknowledgment. The space overhead per process is the vectors q and v which is O(N log m), where m is the maximum number of times any process enters the critical section.
8.5 Ricart and Agrawala’s Algorithm
Ricart and Agrawala’s algorithm uses only 2(N – 1) messages per invocation of the critical section. It does so by combining the functionality of acknowledgment and release messages. In this algorithm, a process does not always send back an acknowledgment on receiving a request. It may defer the reply for a later time. Another advantage of Ricart and Agrawala’s algorithm is that it does not require FIFO ordering of messages.
The algorithm is stated by the following rules:
• To request a resource, the process sends a timestamped message to all processts.
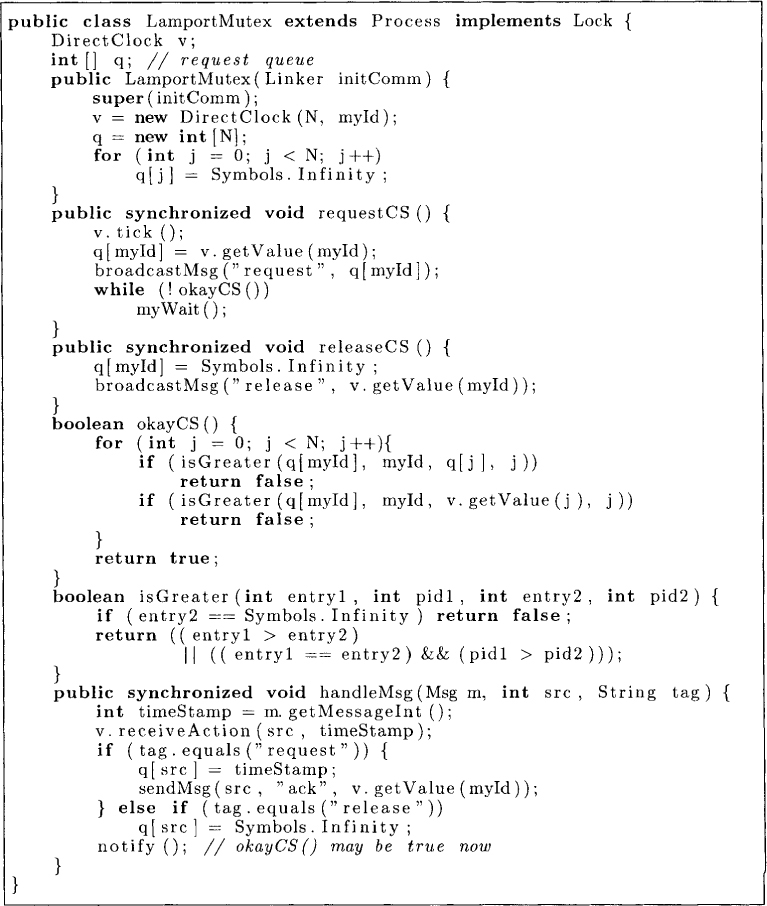
Figure 8.5: Lamport’s mutual exclusion algorithm
• On receiving a request from any other process, the process sends an okay message if either the process is not interested in the critical section or its own request has a higher timestamp value. Otherwise, that process is kept in a pending queue.
• To release a resource, the process sends okay to all the processes in the pending queue.
• The process is granted the resource when it has requested the resource and it has received the okay message from every other process in response to its request message.
The algorithm is presented formally in Figure 8.6. There are two kinds of messages in the system—request messages and okay messages. Each process maintains the logical time of its request in the variable myts. In the method requestCS, a process simply broadcasts a request message with its timestamp. The variable numOkay counts the number of okay messages received since the request was made. On receiving any request with a timestamp lower than its own, it replies immediately with okay. Otherwise, it adds that process to pendingQ.
The algorithm presented above satisfies safety, liveness, and fairness properties of mutual exclusion. To see the safety property, assume that Pi and Pj are in the critical section concurrently and Pi has the smaller value of the timestamp for its request. Pj can enter the critical section only if it received okay for its request. The request made by Pj can reach Pi only after Pi has made its request; otherwise, the timestamp of Pi’s request would have been greater because of the rules of the logical clock. From the algorithm, Pi cannot send okay unless it has exited from the critical section contradicting our earlier assumption that Pj received okay from Pi. Thus the safety property is not violated. The process with the least timestamp for its request can never be deferred by any other process, and therefore the algorithm also satisfies liveness. Because processes enter the critical section in the order of the timestamps of the requests, the fairness is also true.
It is easy to see that every critical section execution requires N - 1 request messages and N – 1 okay messages.
8.6 Dining Philosopher Algorithm
In the previous algorithm, every critical section invocation requires 2(N - 1) messages. We now show an algorithm in which 2(N – 1) messages are required only in the worst case. Consider a large distributed system in which even though N is large, the number of processes that request the critical section, say, n, is small. In our next algorithm, processes that are not interested in the critical section will not be required to send messages eventually.
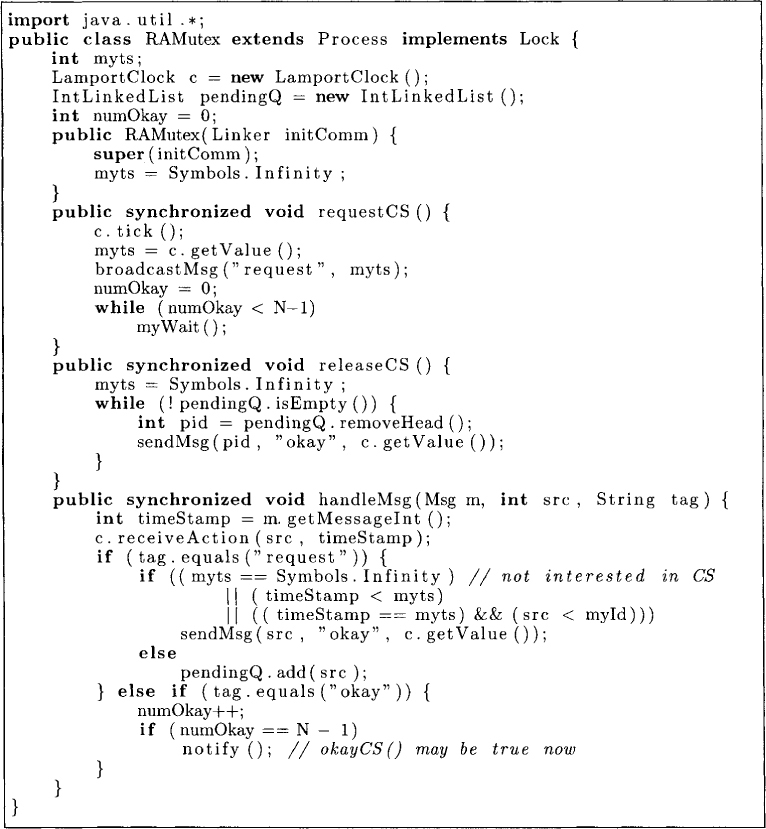
Figure 8.6: Ricart and Agrawala’s algorithm
The next algorithm will also solve a more general problem, the dining philosopher problem, where a resource may not be shared by all the processes. The dining philosopher problem, as discussed in Chapter 3, consists of multiple philosophers who spend their time thinking and eating spaghetti. However, a philosopher requires shared resources, such as forks, to eat spaghetti. We are required to devise a protocol to coordinate access to the shared resources.
There are two requirements on the solution of the dining philosopher problem: (1) we require mutually exclusive use of shared resources, that is, a shared resource should not be used by more than one process at a time; and (2) we want freedom from starvation. Every philosopher (process) should be able to eat (perform its operation) infinitely often.
The crucial problem in resource allocation is that of resolving conflicts. If a set of processes require a resource and only one of them can use it at a time, then there is a conflict that must be resolved in favor of one of these processes. We have already studied one conflict resolution method via logical clocks in Lamport’s and Ricart and Agrawala’s mutual exclusion algorithms. The processes used logical clocks to resolve access to mutual exclusion. If two requests had the same logical clock value, then process identity was used to break ties. Now we study another mechanism that resolves conflicts based on location of auxiliary resources. The auxiliary resources are used only for conflict resolution and are not actual resources.
We model the problem as an undirected graph called a conflict graph, in which each node represents a process and an edge between process Pi and Pj denotes that one or more resources are shared between P1 and Pj. Figure 8.7(a) shows the conflict graph for five philosophers. If a process needs all the shared resources for performing its operation, then only one of any two adjacent nodes can perform its operation in any step. The conflict graph for a simple mutual exclusion algorithm is a complete graph.
Now consider the problem of five dining philosophers sitting around a table such that two adjacent philosophers share a fork. The conflict graph of this problem is a ring on five nodes.
An orientation of an undirected graph consists of providing direction to all edges. The edge between Pi and Pj points from Pi to Pj if Pi has precedence over Pj. We say that an orientation is acyclic if the directed graph that results from the orientation is acyclic. Figure 8.7(b) shows an acyclic orientation of the conflict graph. In a directed graph, we call a node source if it does not have any incoming edge. Any finite-directed acyclic graph must have at least one source (see Problem 8.5). In Figure 8.7, processes P2 and P4 are sources.
To maintain orientation of an edge, we use the notion of an auxiliary resource, a fork, associated with each edge. Process Pi is considered to have the fork associated with the edge (i, j), if it has precedence over Pj in any conflict resolution.
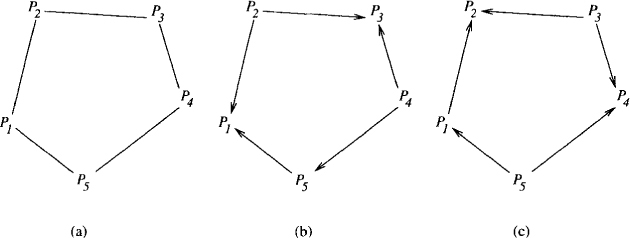
Figure 8.7: (a) Conflict graph; (b) an acyclic orientation with P2 and P4 as sources; (c) orientation after P2 and P4 finish eating
The algorithm for dining philosophers obeys the following two rules:
• Eating rule: A process can eat only if it has all the forks for the edges incident to it, that is, a process can eat only when it is a source.
• Edge reversal: On finishing the eating session, a process reverses orientations of all the outgoing edges to incoming edges.
Now let us look at the rules for transmitting forks. We do not require that once a philosopher has finished eating it sends all the forks to its neighbors. This is because its neighbors may be thinking and therefore not interested in eating. Thus we require that if a philosopher is hungry (interested in eating) and does not have the fork, then it should explicitly request the fork. To request the fork, we use a request token associated with each fork. Although a fork is not transmitted after eating, we still need to capture the fact that the other philosopher has priority over this fork to satisfy the edge reversal rule. Thus we need to distinguish the case when a philosopher has a fork but has not used it from the case when the philosopher has the fork and has used it for eating. This is done conveniently by associating a boolean variable dirty with each fork. Once a philosopher has eaten from a fork, it becomes dirty. Before a fork is sent to the neighbor, it is cleaned.
Our solution is based on keeping an acyclic conflict resolution graph as mentioned earlier. Philosopher u has priority over philosopher v if the edge between u and v points to v. The direction of the edge is from u to v if (1) u holds the fork and it is clean, (2) v holds the fork and it is dirty, or (3) the fork is in transit from v to u.
The forks are initially placed so that the conflict resolution graph is initially acyclic. The algorithm ensures that the graph stays acyclic. Observe that when a fork is cleaned before it is sent, the conflict graph does not change. The change in the conflict graph occurs only when a philosopher eats, thereby reversing all edges incident to it. The algorithm for the dining philosophers problem is given in Figure 8.8. In this algorithm, we have assumed that the conflict graph is a complete graph for simplicity.
We use the following boolean variables for each process Pi:
• fork[j]: Process Pi holds the fork that is shared with Pj.
• request[j]: Process Pi holds the request token for the fork that is shared with Pj.
• dirty[j]: The fork that is shared with Pj is dirty.
It is easy to see that the conflict resolution graph is always acyclic. It is acyclic initially by our initialization. The only action that changes direction of any edge in the graph is eating (which dirties the fork). A philosopher can eat only when she has all the forks corresponding to the edges that she shares with other philosophers. By the act of eating, all those forks are dirtied and therefore all those edges point toward the philosopher after eating. This transformation cannot create a cycle.
Observe that when a fork is transmitted, it is cleaned before transmission and thus does not result in any change in the conflict resolution graph.
The conflict graph for the mutual exclusion on N processes is a complete graph on N nodes. For any philosopher to eat, she will need to request only those forks that she is missing. This can be at most N - 1. This results in 2(N – 1) messages in the worst case. Note that if a process never requests critical section after some time, it will eventually relinquish all its forks and will not be disturbed after that. Thus, the number of messages in the average case is proportional only to the number of processes who are active in accessing the resource.
8.7 Token-Based Algorithms
Token-based algorithms use the auxiliary resource token to resolve conflicts in a resource coordination problem. The issue in these algorithms is how the requests for the token are made, maintained, and served. A centralized algorithm is an instance of a token-based algorithm in which the coordinator is responsible for keeping the token. All the requests for the token go to the coordinator.
In a token ring approach, all processes are organized in a ring. The token circulates around the ring. Any process that wants to enter the critical section waits for the token to arrive at that process. It then grabs the token and enters the critical section. This algorithm is shown in Figure 8.9. The algorithm is initiated by the coordinator who sends the token to the next process in the ring. The local state of a process is simply the boolean variable haveToken which records whether the process has the token. By ensuring that a process enters the critical section only when it has the token, the algorithm guarantees the safety property trivially.
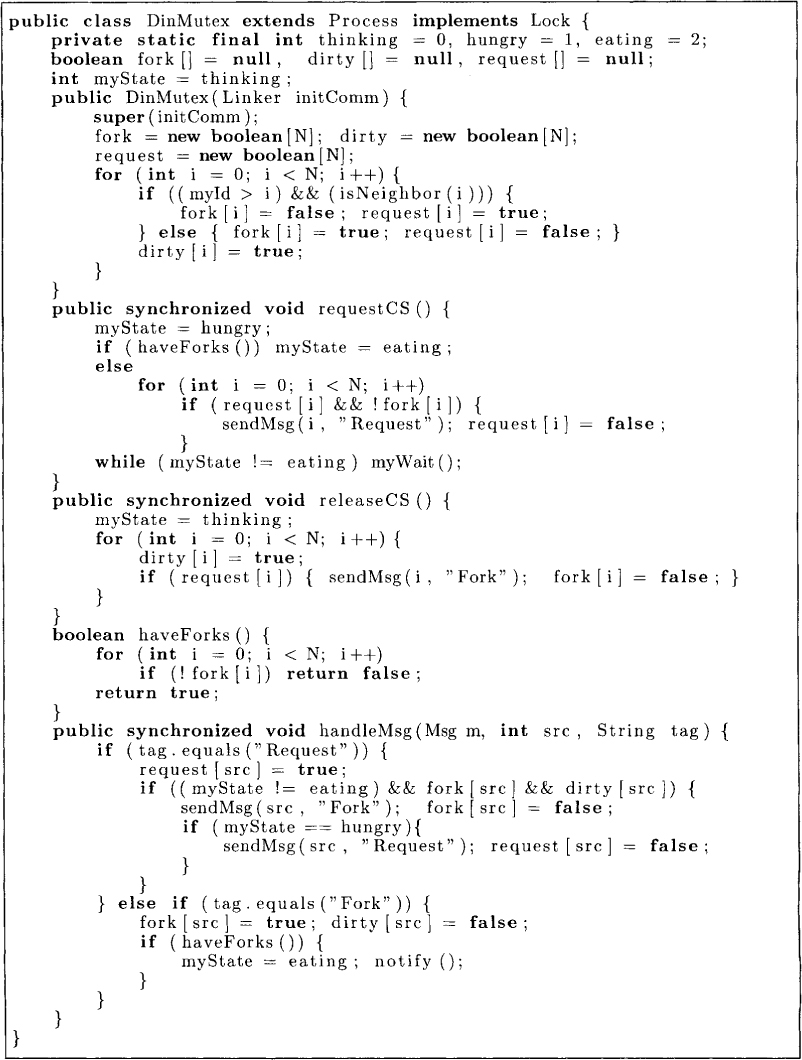
Figure 8.8: An algorithm for dining philosopher problem
In this algorithm, the token is sent to the next process in the ring after a fixed period of time. The reader is invited to design an algorithm in which the token moves only on receiving a request.
8.8 Quorum-Based Algorithms
Token-based algorithms are vulnerable to failures of processes holding the token. We now present quorum-based algorithms, which do not suffer from such single point of failures. The main idea behind a quorum-based algorithm is that instead of asking permission to enter the critical section from either just one process as in token-based algorithms, or from all processes, as in timestamp-based algorithms in Chapter 2, the permission is sought from a subset of processes called the request set. If any two request sets have nonempty intersection, then we are guaranteed that at most one process can have permission to enter the critical section. A simple example of this strategy is that of requiring permission from a majority of processes. In this case, a request set is any subset of processes with at least ![]() processes.
processes.
Voting systems and crumbling walls are some examples of quorum systems. In voting systems, each process is assigned a number of votes. Let the total number of votes in the system be V. A quorum is defined to be any subset of processes with a combined number of votes exceeding V/2. If each process is assigned a single vote, then such a quorum system is also called a majority voting system.
When applications require read or write accesses to the critical section, then the voting systems can be generalized to two kinds of quorums—read quorums and write quorums. These quorums are defined by two parameters R and W such that R + W > V and W > V/2. For a subset of processes if the combined number of votes exceeds R, then it is a read quorum and if it exceeds W, then it is a write quorum.
To obtain quorums for crumbling walls, processes are logically arranged in rows of possibly different widths. A quorum in a crumbling wall is the union of one full row and a representative from every row below the full rows. For example, consider a system with 9 processes such that P1 to P3 are in row 1, P4 to P6 are in row 2 and P7 to P9 are in row 3. In this system, {P4, P5, P6, P9} is a quorum because it contains the entire second row and a representative, P9, from the third row. Let, CW(n1, n2, . . . , nd) be a wall with d rows of width n1, n2, . . . , nd, respectively. We assume that processes in the wall are numbered sequentially from left to right and top to bottom. Our earlier example of the crumbling wall can be concisely written as CW(3,3,3). CW(1) denotes a wall with a single row of width 1. This corresponds to a centralized algorithm. The crumbling wall CW(1, N – 1) is called the wheel coterie because it has N – 1 “spoke” quorums of the form {1, i} for i = 2, . . . , N and one “rim” quorum {2,. . . , N}. In a triangular quorum system, processes are arrariged in a triangle such that the ith row has i processes. If there are d rows, then each quorum has exactly d processes. In a grid quorum system, N(= d2) processes are arranged in a grid such that there are d rows each with d processes. A quorum consists of the union of one full row and a representative from every row below the full rows.
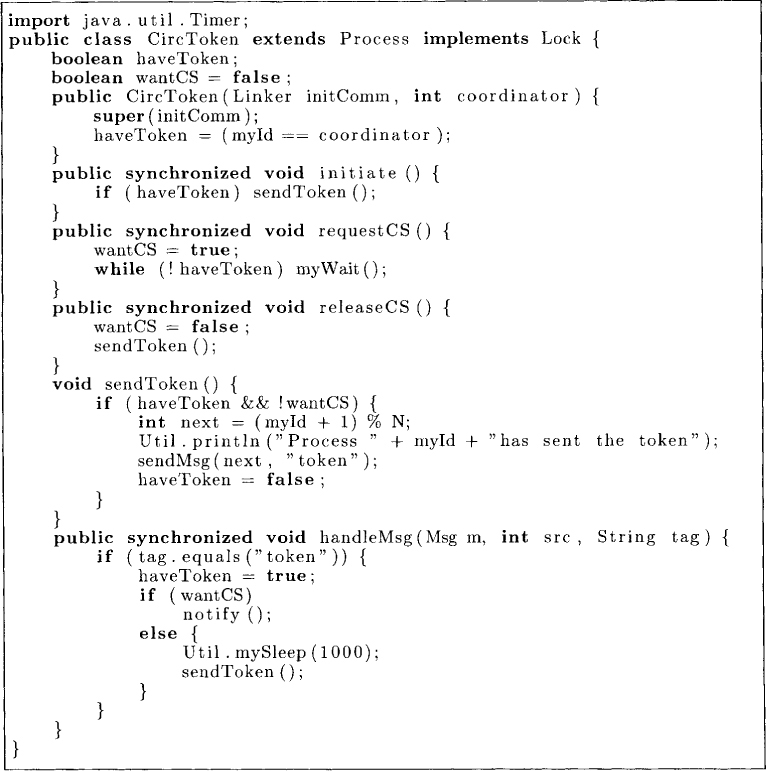
Figure 8.9: A token ring algorithm for the mutual exclusion problem
It is important to recognize that the simple strategy of getting permission to enter the critical section from one of the quorums can result in a deadlock. In the majority voting system, if two requests gather N/2 votes each (for an even value of N), then neither of the requests will be granted. Quorum-based systems require additional messages to ensure that the system is deadlock-free. The details of ensuring deadlock freedom are left to the reader (see Problem 8.9).
8.9 Problems
8.1. How will you modify the centralized mutual exclusion algorithm to ensure fairness. (Hint: Use vector clocks modified appropriately.)
8.2. The mutual exclusion algorithm by Lamport requires that any request message be acknowledged. Under what conditions does a process not need to send an acknowledgment message for a request message?
8.3. Some applications require two types of access to the critical section—read access and write access. For these applications, it is reasonable for two read accesses to happen concurrently. However, a write access cannot happen concurrently with either a read access or a write access. Modify algorithms presented in this chapter for such applications.
8.4. Build a multiuser Chat application in Java that ensures that a user can type its message only in its critical section. Ensure that your system handles a dynamic number of users, that is, allows users to join and leave a chat session.
8.5. Show that any finite directed acyclic graph has at least one source.
8.6. When can you combine the request token message with a fork message? With this optimization, show that a philosopher with d neighbors needs to send or receive at most 2d messages before making transition from hungry state to eating state.
8.7. Show that the solution to the dining problem does not deny the possibility of simultaneous eating from different forks by different philosophers (when there is no conflict in requirements of forks).
8.8. (due to Raymond [Ray89]) In the decentralized algorithm, a process is required to send the message to everybody to request the token. Design an algorithm in which all processes are organized in the form of a logical binary tree. The edges in the tree are directed as follows. Each node except the one with the token has exactly one outgoing edge such that if that edge is followed, it will lead to the node with the token. Give the actions required for requesting and releasing the critical section. What is the message complexity of your algorithm?
8.9. (due to Maekawa [Mae85]) Let all processes be organized in a rectangular grid. We allow a process to enter the critical section only if it has permission from all the processes in its row and its column. A process grants permission to another process only if it has not given permission to some other process. What properties does this algorithm satisfy? What is the message complexity of the algorithm? How will you ensure deadlock freedom?
8.10. Compare all the algorithms for mutual exclusion discussed in this chapter using the following metrics: the response time and the number of messages.
8.11. Discuss how you will extend each of the mutual exclusion algorithms to tolerate failure of a process. Assume perfect failure detection of a process.
8.12. Extend all algorithms discussed in this chapter to solve k-mutual exclusion problem, in which at most k processes can be in the critical section concurrently.
8.13. (due to Agrawal and El-Abbadi [AEA91]) In the tree-based quorum system, processes are organized in a rooted binary tree. A quorum in the system is defined recursively to be either the union of the root and a quorum in one of the two subtrees, or the union of quorums of subtrees. Analyze this coterie for availability and load.
8.10 Bibliographic Remarks
Lamport’s algorithm for mutual exclusion [Lam78] was initially presented as an application of logical clocks. The number of messages per invocation of the critical section in Lamport’s algorithm can be reduced as shown by Ricart and Agrawala [RA81]. The token-based algorithm can be decentralized as shown by Suzuki and Kasami [SK85]. The tree-based algorithm in the problem set is due to Raymond [Ray89]. The use of majority voting systems for distributed control is due to Thomas [Tho79], and the use of weighted voting systems with R and W parameters is due to Gifford [Gif79]. Maekawa [Mae85] introduced grid-based quorums and quorums based on finite projective planes. The tree-based quorum in the problem set is due to Agrawal and El-Abbadi [AEA91]. The triangular quorum systems are due to Lovasz [Lov73]. The notion of crumbling walls is due to Peleg and Wool [PW95].