
June 12, 2012 16:25 PSP Book - 9in x 6in 06-Junichi-Takeno-c06
Chapter 6
Professor Rodney Brooks’ Robots
In 1986, Rodney Brooks, then a roboticist at the MIT Artificial
Intelligence Laboratory in the United States, announced a new robot.
This robot featured a novel design compared with conventional
robots. Brooks’ design methodology is known as subsumption
architecture. Conventional robots are generally called mechatronics
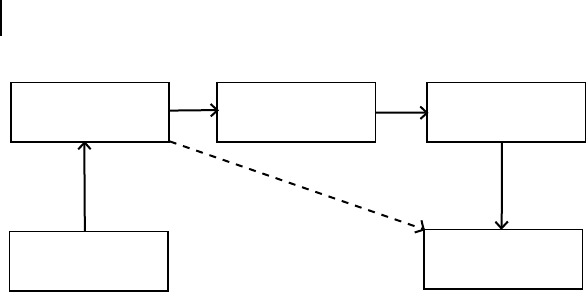
models, which Brooks called a Cartesian model. Figure 6.1 shows an
example of the mechatronics model.
A robot captures information about its surrounding environment
by “sensing.” The robot then recognizes the environment based on
the information it captured. For example, the robot recognizes that
an obstacle is in front of it. On the basis of this recognition of the
environment, the robot generates an action plan. On discerning an
obstacle, the robot itself creates a plan to avoid the obstacle. The
collision avoidance plan can include various actions. For example,
the robot may stop, slow down to let the obstacle go by, increase
speed to cut across in front of the obstacle, or somehow run away.
It selects the action to take depending on the given situation. It
then takes the selected action using the drive system. As a result,
the robot moves as planned, but here a serious problem arises. The
environment changes as soon as the robot moves. The robot discerns
that its environment has changed via its sensors, and the process is
Creation of a Conscious Robot: Mirror Image Cognition and Self-Awareness
Junichi Takeno
Copyright
c
2013 Pan Stanford Publishing Pte. Ltd.
ISBN 978-981-4364-49-2 (Hardcover), 978-981-4364-50-8 (eBook)
www.panstanford.com
June 12, 2012 16:25 PSP Book - 9in x 6in 06-Junichi-Takeno-c06
92 Professor Rodney Brooks’ Robots
Environment
recognition
Action
planning
Sensing
(a)
(b)
Selecting
action
Drive
system
Figure 6.1. Mechatronics model.
repeated again (Fig. 6.1). A Cartesian robot thus repeats the process
from sensing to behaving. There is no mistake in this process. All
conventional robots are designed after this model.
However, many researchers, including the author, are not neces-
sarily completely satisfied with the mechatronics model. Typically,
no problems are experienced when researchers move a robot in a
laboratory for research purposes, but this serial processing system
turns into quite an annoying process once they attempt to develop a
practical or commercial robot.
In the laboratory, researchers simply pursue the study to achieve
their purpose and are not much concerned about the real-time
response. In addition, we should take into consideration that the
speed of computers was very much slower in the 1980s when
Brooks conducted his robot studies. At that time, if one adopted an
imaging system for the sensors, the turnaround time was terrible —
as long as several seconds to complete the processing for a single
screen. Nevertheless, researchers tried hard to improve the “real-
timeness” by, for example, introducing natural constraints, devising
bypass routing from environment recognition to the drive system,
and incorporating hardware to execute certain programs (Fig. 6.1b).
Natural constraints include the well-known epipolar constraint
explained in Chapter 2. In natural environments, for example, you
cannot see an object behind an obstacle.
Brooks introduced his new robot design methodology against
this historical backdrop. With the robot system conceived by
Brooks, parallel processing replaced the serial processing of the
June 12, 2012 16:25 PSP Book - 9in x 6in 06-Junichi-Takeno-c06
Professor Rodney Brooks’ Robots 93
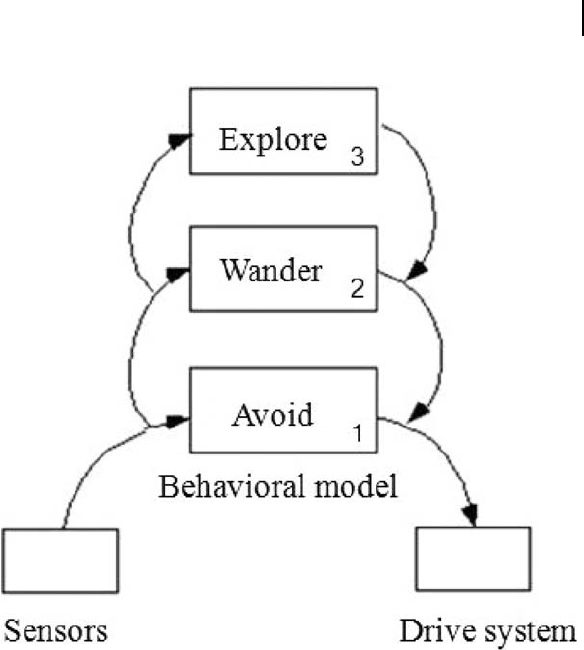
Figure 6.2. Subsumption architecture.
conventional mechatronics models. The structure of his system is
shown in Fig. 6.2.
Apparently, one cannot see anything suggesting environment
recognition or action planning. In fact, these two factors are actually
hidden dexterously. Note that the behavioral modules are stacked
one above the other. Each layer corresponds to an independent
behavior program. Brooks’ robot switches its behavior using the
rule, “when a layer is unable to function, a lower layer will take
over.” For example, if exploring is impossible, the robot goes to
and repeats wandering and avoiding (Fig. 6.2). Any layer functions
with support from the underlying layers. “Subsume” means that a
higher layer includes all the underlying layers. This is the meaning
of “subsumption.” The capacity of the behavior layers increases as
June 12, 2012 16:25 PSP Book - 9in x 6in 06-Junichi-Takeno-c06
94 Professor Rodney Brooks’ Robots
Figure 6.3. Brook’s robot Cog.
one climbs the stack of layers. For example, the lowest layer is
“avoiding,” the one above it “wandering,” and the highest “exploring.”
“Exploring” is selected only when there is no necessity of avoiding
and wandering. To put it the other way around, avoiding is selected
when exploring and wandering are suppressed.
The switching of the behavioral modules is triggered by replacing
(or suppressing) inputs transmitted from the sensors to the behav-
ioral modules and inhibiting outputs from the behavioral modules.
The subsumption architecture conceals the process of environment
recognition by using a dexterous technique of replacing inputs
transmitted to the behavioral modules and suppressing outputs
from them. It also hides the process of action planning by organizing
a variety of simple behavioral modules into layers from the low to
high levels. The net result is that the robot engages in continuous
behaviors and will not end up in a deadlock thanks to the behavior-
based design. The sensors and drive system are directly connected
via the behavioral modules, so that the reaction time from sensing
to behaving is short. Furthermore, the robot will never stall because
June 12, 2012 16:25 PSP Book - 9in x 6in 06-Junichi-Takeno-c06
Professor Rodney Brooks’ Robots 95
multiple behavioral modules are prepared in layers and at least one
or more modules are always available for functioning. It is easy to
retrofit behavioral modules on already designed robots.
The robot design method proposed by Brooks has widely
influenced later robot researchers.
Brooks has recently created a humanoid robot called Cog and has
tried to attain in it a high-level intelligence similar to that of humans
through learning by interacting with the environment and by adding
behavioral modules. According to a recent progress report, it is
getting difficult to increase the behavioral modules as the robot rises
higher in the layers.
Summary
Prof. Rodney Brooks at MIT proposed a new robot design method-
ology called subsumption architecture. This design methodology
may be said to be a parallel processing type as opposed to the
conventional serial processing type of robot. The robot’s reaction is
quick because the sensors and drive systems are directly coupled via
behavioral modules. Many behavioral modules are available and are
stacked in layers one above the other from low to high levels.
Brooks believes that by adding relatively simple behavioral
modules, high-level knowledge similar to that of humans can be
realized. His approach is behavior based but is also functional
because the robot’s behaviors are classified by several functions.
Brooks does not talk much about human mental activities but seems
to think that these will emerge on their own as behavioral modules
are added. If he thinks emergent human mental activities can be
realized by adding behavioral modules, he may also be trying a
phenomenological approach to some extent.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.