
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
Conscious Robot and Mirror Image Cognition Experiments 213
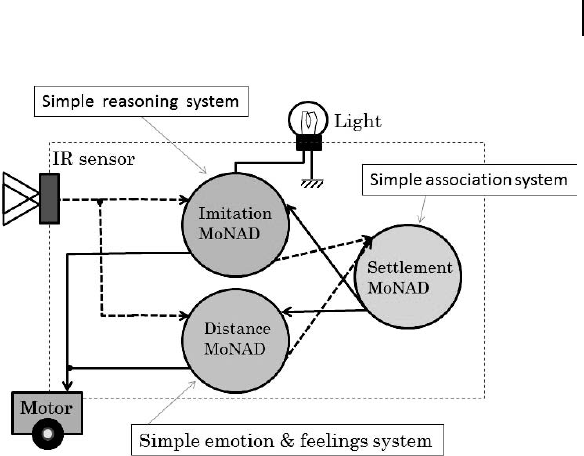
Figure 10.3. Structure of the mirror image cognition robot.
10.5.2 The Experiments
Three experiments were conducted.
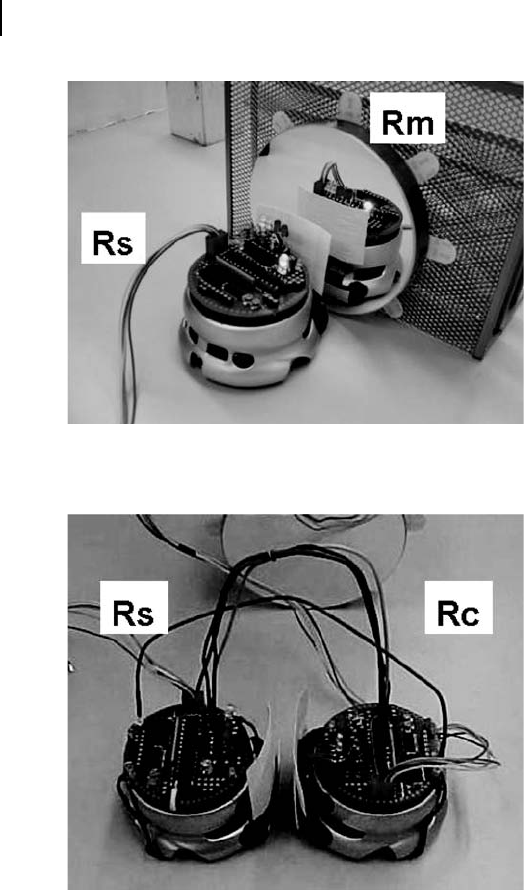
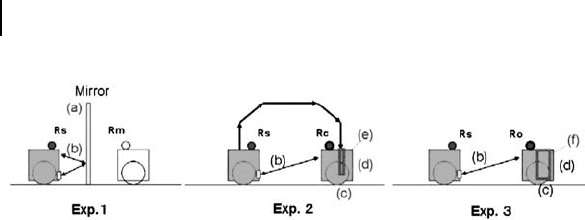
Experiment 1: Robot Rs imitates the behavior of its mirror image
Rm (Fig. 10.4). The IR reflectance of the mirror used in the
experiment is 98%. (IR reflectance of ordinary mirrors used in daily
life is typically 85%.)
(e1-1) Self robot Rs incorporates the consciousness system.
(e1-2) Self robot Rs compares and imitates the behavior of its
mirror image Rm.
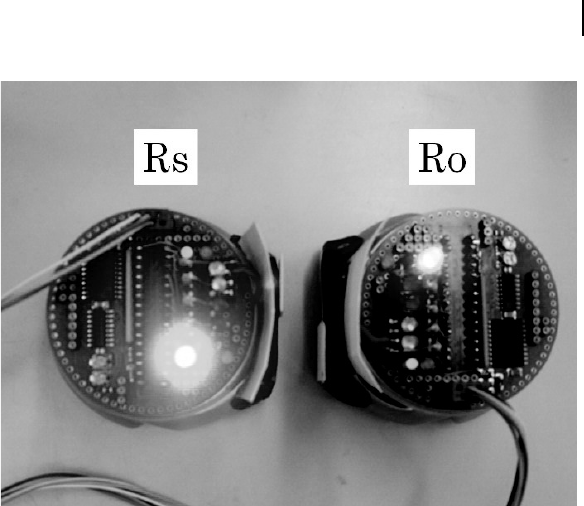
Experiment 2: Self robot Rs imitates the other robot Rc, which is
completely controlled via cables by self robot Rs (Fig. 10.5).
(e2-1) The other robot Rc is placed in front of self robot Rs (no
mirror is used). Robot Rc is physically almost identical to robot Rs.
(e2-2) Both robots are connected by control cables. Commands
are issued via cables to make the other robot behave in the same
way as the self robot.
(e2-3) The other robot is programmed with a simple reflex
system to execute the specified commands.
(e2-4) The self robot imitates the behavior of the other robot.
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
214 Physical Demonstration of Successful Mirror Image Cognition by a Robot
Figure 10.4. Experiment 1.
Figure 10.5. Experiment 2.
Experiment 3: Self robot Rs imitates the behavior of other robot
Ro, which incorporates nearly the same hardware and software as
self robot Rs. Both robots imitate each other repeatedly (Fig. 10.6).
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
Why Do Coincidence Rates Differ Depending on the Robot? 215
Figure 10.6. Experiment 3.
(e3-1) Control cables, which were used to make the other robot
behaveinthesamewayastheselfrobot,areremoved.
(e3-2) The reflex system software is removed from the other
robot Rc and the same consciousness system as installed in self
robot Rs is installed in robot Rc. Self robot Rs and the other robot
Ro have nearly the same hardware and software.
(e3-3) The self robot and the other robot imitate each other.
10.5.3 Observation of Experiment Results
The rate of coincidence of behavior of mirror image robot Rm,
controlled robot Rc, and the other robot Ro are about 70%, 60%, and
50%, respectively. These values do not intersect with one another.
10.6 Why Do Coincidence Rates Differ Depending on the
Robot?
All the robots used in the experiments have nearly the same
physical features and functional specifications. The controlled robot
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
216 Physical Demonstration of Successful Mirror Image Cognition by a Robot
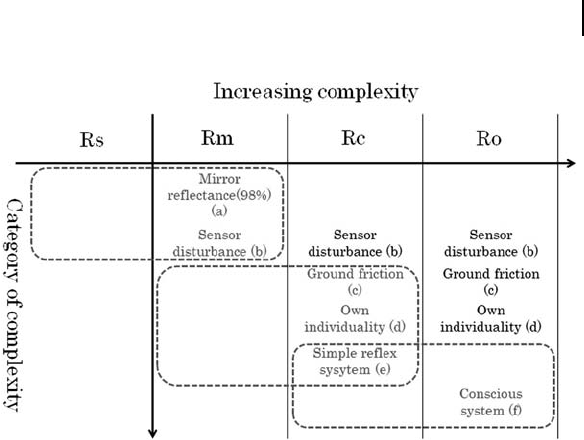
Figure 10.7. Increasing the complexity of other robots.
Rc in Experiment 2 was also used in Experiment 3 as the other
robot Ro. The different coincidence rates are due to different
complexities of the robots in terms of physical property and
functional specifications (Fig. 10.7).
Rs versus Rm: Self robot Rs and mirror image robot Rm have
identical physical properties because robot Rm is a mirror image of
robot Rs. Nevertheless, Rm is more complex than Rs because of the
effect of mirror reflectance (a), which will never reach 100%, and
the interference of the external world with the IR sensors (b).
Rm versus Rc: Controlled robot Rc is physically more complex than
mirror image robot Rm. Unlike robot Rm, robot Rc is free from
the problem of mirror reflectance. Nevertheless, robot Rc is more
complex than robot Rm because of friction when robot Rc runs on
the floor (c); the individuality of the robots due to slightly different
functions of motors and sensors (d); and the installation of the
simple reflex system in robot Rc (e). For these reasons, robot Rc is,
on the whole, physically more complex than robot Rm.
Rs versus Rc: Controlled robot Rc has basically identical physical
functions to those of self robot Rs except that the functions of the
motors (m1, m2) and sensors (s1, s2) are slightly different. The
ground friction (f1, f2) of the drive wheels is also slightly different.
This means that controlled robot Rc has its own individuality
different from self robot Rs.
Rc versus Ro: Independent robot Ro is physically more complex
than controlled robot Rc because it incorporates the consciousness
system, whereas robot Ro has only a simple reflex system installed.
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
Summary and Consideration 217
Figure 10.8. Summary of the complexity.
The difference between Experiments 1 and 2 is explained
mostly by the increased physical complexity, whereas the difference
between Experiments 2 and 3 arises from increased functional
complexity, which is described in Fig. 10.8.
10.7 Summary and Consideration
The cable-controlled robot Rc is considered part of self robot Rs
because it is connected to, and behaves according to the instructions
of, self robot Rs. According to the results of our experiments and
physical observations, the behavior coincidence rate of the mirror
image robot Rm is always higher than that of the cable-controlled
robot Rc. Based on these facts, the author concludes as follows.
Robot Rs determines that mirror image robot Rm is part of the
self and is controlled by the self like robot Rc. According to our
experiments, self robot Rs determines whether the other robot is
theselfortheotherbasedonthecoincidencerate(successrate)
for behaviors. The threshold value is about 60% for self robot Rs.
When the success rate is above 60%, the self robot judges that
the other robot is actually the self. In other words, a robot judges
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.