
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
Chapter 8
Machine Consciousness
I have described the achievements of general physiological and
physical research on the human brain and also introduced out-
standing historical research studies on human consciousness and
the mind and the relevant achievements. There is a long history of
research encompassing psychology, philosophy, cerebral physiology,
information science, and cognitive science.
Braitenberg, a cybernetics researcher, demonstrated the possi-
bility of constructing something resembling the human mind on a
machine.
I explained mathematical methods for understanding and using
artificial neural networks that are potentially capable of artificially
reproducing human neurons and nerve networks. Roboticist Brooks
proposed subsumption architecture — the world’s first concept of
its kind. He created a robot that moved around at all times. The
behaviors of the robot were hierarchized and higher-level behaviors
were achieved as the robot built up a behavior hierarchy pyramid,
eventually fulfilling the emergence of consciousness and the mind,
according to Brooks.
Brooks further outlined the techniques of mechanical evolution
in which the principle of the survival of the fittest in biological
evolution is applied using an engineering approach. On the basis of
Creation of a Conscious Robot: Mirror Image Cognition and Self-Awareness
Junichi Takeno
Copyright
c
2013 Pan Stanford Publishing Pte. Ltd.
ISBN 978-981-4364-49-2 (Hardcover), 978-981-4364-50-8 (eBook)
www.panstanford.com
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
128 Machine Consciousness
this knowledge, I will introduce some studies closely related to the
development of a conscious robot.
8.1 Walter’s Turtle
W. Grey Walter (1910–1977), a US-born researcher, will be remem-
bered for his world’s first life-simulating robot. Between 1948 and
1949, he created two robots named Elsie and Elmer. This was the
era when the ENIAC electronic computer had just been developed.
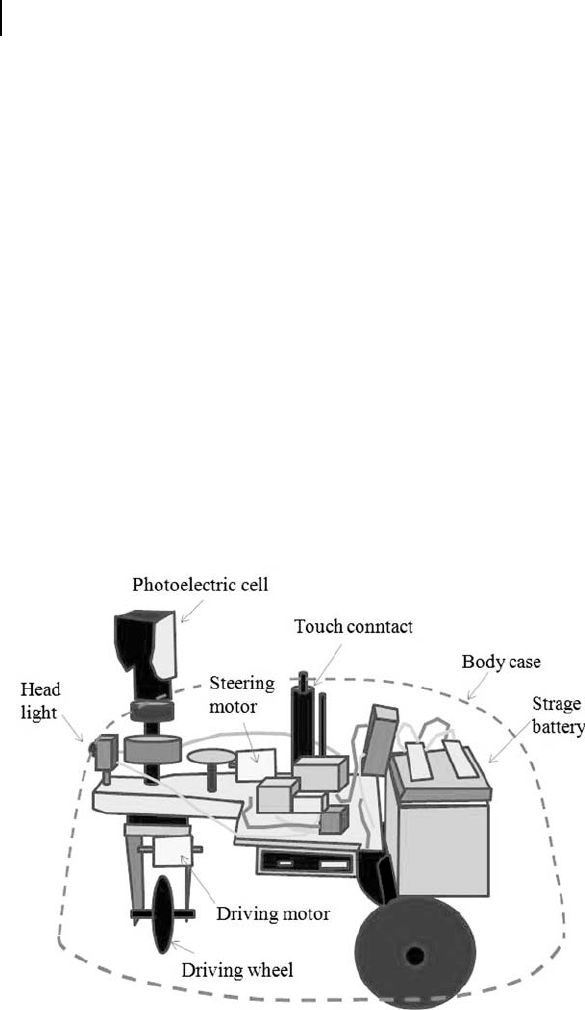
Driven by batteries, Walter’s robots travel on three wheels. An
oblong turtle-shaped shell protects the body, and a small chimney-
like shape protrudes from the shell (Fig. 8.1a,b). The front steering
wheel turns and determines the traveling direction of the robot. The
two rear-drive wheels control forward and backward travel. A light
sensor (a photoelectric cell) is mounted on top of the chimney to
observe the environment. The chimney is directly coupled to the
steering wheel, so that when the sensor turns toward a light, the
Figure 8.1. Internal structure of the robot.
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
Walter’s Turtle 129
steering wheel turns in the same direction. The robot is provided
with a touch sensor to detect a collision with an obstacle. The touch
sensor is mounted on the shell and a collision is detected when the
shell hits an obstacle while traveling. The robot has a headlight on
its front to show its position. The intensity of this lamp seems to
be relatively low. It is said that this lamp also serves to confirm the
energization of the robot (a pilot lamp). The robot’s electronic circuit
comprises two electron tubes, several relays, and switches. This is a
very simple circuit compared with a modern computer. Of course,
this circuit was analog not digital.
Several landmark experiments performed by Walter are intro-
duced in this chapter. His experiments were performed in a dark
room since the robot was designed to react to light.
The first experiment that I would like to introduce was conducted
with a high-intensity lamp and with a relatively large obstacle placed
in the room. The robot was positioned such that it could not see the
light due to the obstacle. The robot initially moved around without
purpose. Accidentally, the robot hit the obstacle and moved back.
As it moved back, the robot slightly changed its traveling direction
(because it was designed to do so). The robot stopped and then again
moved forward. After repeating this series of movements for some
time, the robot accidentally cleared the obstacle and the lamp was
visible to the photosensor of the robot. The robot reacted and turned
toward the light and advanced. The robot seems to be designed to
stop when the light intensity reached a certain level, then move back
a little, and thereafter resume forward motion. When viewed from a
macroscopic perspective, what the robot did was to go around, not
toward the lamp. This behavior reportedly looked like a living being
that was aiming at its prey while making a detour to avoid obstacles.
In the next experiment, Walter uses two robots and puts away
the large lamp that he used in the previous experiment. The two
opposing robots move ahead toward each other, aiming at their
respective headlamps. Since the light intensity of the headlamps was
small, the two robots repeatedly collided and backed up. The robots
were described to be “engaging in a conversation.”
Another feature of the robots is that they returned to their home
base, called a dock, when their batteries were low for recharging. A
strong light installed in the dock guides the robot into the hanger.
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
130 Machine Consciousness
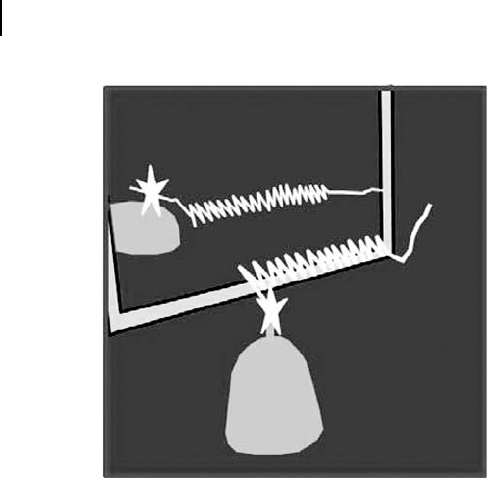
Figure 8.2. Walter’s self-recognition experiments.
Walter’s robot could move almost perpetually by recharging its
energy like a living being.
The last noteworthy experiment of Walter that I would like to
introduce is his self-recognition experiment using a mirror (Fig. 8.2).
A robot is placed in front of a relatively large flat mirror. Apparently,
this is similar to the experiment with two robots introduced above
except that the second robot is the image in the mirror. The robot
reacts to the image of the flame of a candle set on its shell and
moves toward the image. The robot hits the mirror and thereafter
repeatedly backs up, moves forward, and collides with the mirror.
How is this different from the previous experiment? In the previous
experiment, the movement of the two robots gets disordered as
they repeat the same movement, but in this mirror experiment, the
movement of the “two robots” (i.e., the robot and its reflected image)
is synchronized because the mirror is used as an intermediary.
Because of its intrinsic property, the mirror traces the motion of the
robot moving in front of it.
I think this was the world’s first experiment that showed the
possibility of having a robot discriminate between its self-image in
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
Kitamura’s Robot 131
the mirror and another robot. It is a wonder that such an experiment
was successfully conducted in as early as 1950. This experiment
suggests the possibility of mirror image cognition by robots. Mirror
image cognition by a robot is a theme of study aimed at unraveling
the mystery of human consciousness by exploring the human
mechanism of mirror image cognition through the development of
a robot with a built-in mechanism of awareness of its self-image
reflected in a mirror.
A question, however, remains: Does Walter’s robot really
discriminate between its self-image and the other? This experiment
seems only to show that the robot can discriminate between the
other and some other. Can we simply conclude that “some other” is
none other than the self? I think it is difficult to judge that “some
other” is the robot’s “self-image.”
I personally believe that in this experiment the robot discrimi-
nated between the other and some other, or between two different
others. In order to assert that some other is the robot’s self-image,
some concrete gadget to scientifically show their relevance must be
built into the recognition mechanism of the robot, or at least, the
relevance must be shown with scientific proof.
8.1.1 Summary and Observations
The small robot called a turtle developed by Walter was the
world’s first biological robot. Walter conducted many interesting
experiments and demonstrated the possibilities of robots to
people worldwide at expositions. Prof. Braitenberg and many
other researchers owe their various enlightenments to Walter’s
experiments. Walter’s experiments using mirrors, in particular, were
epoch-making in the sense that they were the first challenge to the
difficult problem of self-image cognition. I wish to acknowledge that
his study was the first step toward the success of mirror image
cognition by robots, and I express my respect for his achievements.
8.2 Kitamura’s Robot
The conscious robot developed by Tadashi Kitamura seems to be
deeply influenced by Brooks’ subsumption architecture. Kitamura’s
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.