
June 12, 2012 18:12 PSP Book - 9in x 6in 07-Junichi-Takeno-c07
112 Artificial Neural Networks and Machine Evolution
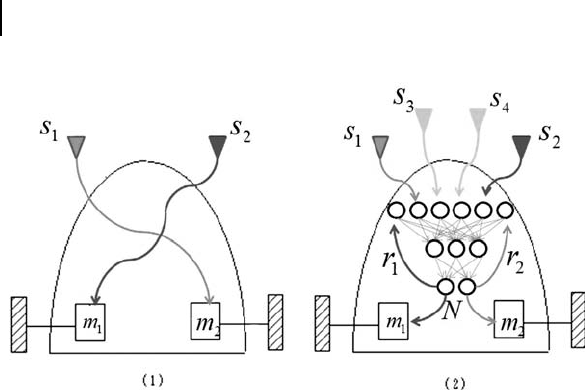
Figure 7.11. Braitenberg robot and its development.
7.2 Theory of Robot Evolution
In the previous chapter, we explained that neural networks can
learn output patterns in response to input patterns. As such, it
would be possible to build a machine with sensors and motors or
other drive units, in which the sensors generated input patterns
and the resultant output patterns were connected to the motors, to
make the machine move in response to the values of the sensors.
This was actually done by Braitenberg. How the machine reacts is
determined by the neural network connected between the sensors
and the motors.
In the Braitenberg robot, the sensors and motors are connected
by simple circuits. With such a simple design, the robot achieved
remarkable motion performance (Fig. 7.11(1)).
We are now able to replace the simple circuit with a complex
neural network in the Braitenberg robot (Fig. 7.11(2)).
It has gradually become known that it is not so easy for a robot to
learn complex neural networks, in particular, a recurrent network.
Let’s stop and think this over for a moment. The original objective
of learning a neural network is to obtain desirable output patterns
for a given set of input patterns. To obtain desirable output patterns,
we only need to adequately modify the synaptic values in the neural
network.
June 12, 2012 18:12 PSP Book - 9in x 6in 07-Junichi-Takeno-c07
Theory of Robot Evolution 113
7.2.1 Machine Evolution Approach
Robotics researchers hit upon the idea of using the techniques of
evolution that were broadly adopted in biological studies. They
decided to apply the principle of the survival of the fittest in the
development of robots.
Assume 10 robots decide their actions using their own respec-
tively different artificial neural networks. Four of them perform
desirable actions, while the others fail to do so (e.g., could not avoid
obstacles). The four robots are determined to be the Fittest that
survive. The surviving four robots create the next generation of
robots. The principle of the survival of the fittest is again applied
to the next generation, and robots that act desirably survive. If this
process were repeated over some generations, we would eventually
have robots that acted excellently. By simulating the principles of the
evolution of organisms in this way, researchers created the machine
evolution approach.
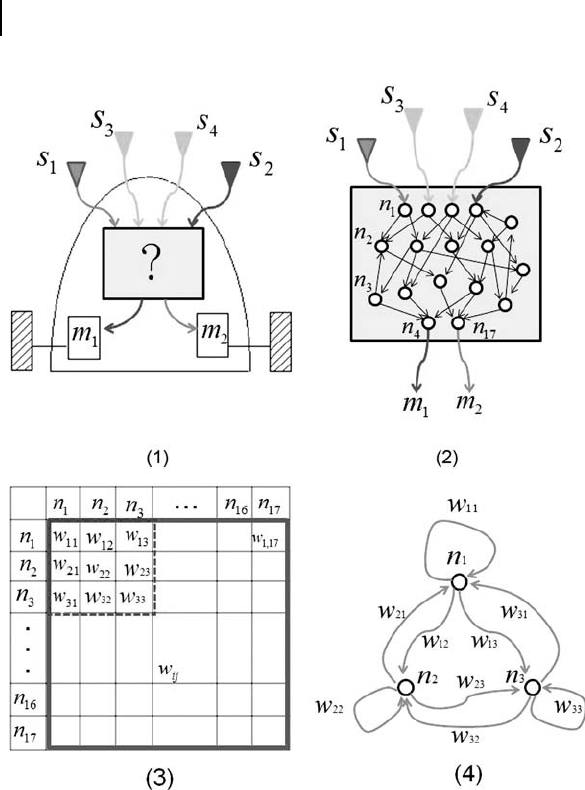
The robot shown in Fig. 7.12(1) has four sensors to generate
input patterns. These input pattern values are transmitted to the
output patterns (motors) via neural networks (Fig. 7.12(2)). The
neural networks can be variously configured by how their junction
of neurons and synaptic values are set. The variety of neural
networks that can be configured means that the robots’ behaviors
can also be diverse. What I mean is that we only need to adequately
vary the artificial neural networks for the actions we wish the robot
to perform.
The neural network shown in Fig. 7.12(2) has 17 neurons
connected by 27 synapses. The state of connection is shown in the
matrix in Fig. 7.12(3). The top row and the leftmost column denote
all neurons (n
1
, n
2
, n
3
,...,n
17
). The element w
12
, for example, in the
matrix represents the synaptic value from neuron n
1
to n
2
. Generally,
the element w
ij
in the matrix represents the synaptic value from
neuron n
i
to n
j
. This matrix thus shows all of the synapses and
synaptic values for the entire set of neurons. Let us consider the
simple case of three neurons n
1
, n
2
,andn
3
. The area enclosed by
the dotted lines in Fig. 7.12(3) is the region of interest. This region
is graphically represented in Fig. 7.12(4). In this diagram, the three
neurons and all of their synapses with the corresponding values are
June 12, 2012 18:12 PSP Book - 9in x 6in 07-Junichi-Takeno-c07
114 Artificial Neural Networks and Machine Evolution
Figure 7.12. Robot evolution.
covered. In discrete mathematics, this diagram is called a directed
complete graph with three nodes. Synaptic weight w
11
is the neural
pathway from neuron n
1
to itself, which is called a self-loop in
technical terms and is a kind of recurrent pathway.
Since the elements in this matrix determine the behavior of a
robot, all of the behaviors of the robot can be programmed by
specifying all combinations of the elements.
June 12, 2012 18:12 PSP Book - 9in x 6in 07-Junichi-Takeno-c07
Theory of Robot Evolution 115
As such, in a direct way of thinking, it would seem to be
possible to discover neural networks that constitute the substance of
human consciousness or the mind in the combinations of elements
of all of the synapses. If the neural network constituting human
consciousness or the mind is a redundant system, however, I am
afraid the possibility of discovery is very low.
Putting aside the difficult problem of consciousness and the
mind for now, it is clear that the optimum behavior for the robot
can be selected from among these combinations of elements. For
three neurons, the maximum number of neural pathways (number
of synapses) is 9 (number of neurons × number of neurons). In
Fig. 7.12(4), the maximum number of neural pathways is 289 since
there are 17 neurons.
Let the maximum value that a synaptic weight w
ij
can take
be a one-digit number in the decimal system, i.e., an integer
between 0 and 9. Then in the case of the 3 neurons shown in
Fig. 7.12(4), each synaptic value can take 10 different numbers,
and there would be 1000 (10
3
) different pattern possibilities in
this neural circuitry. When we run the robot by applying each and
every possible pattern to its neural circuitry shown in Fig. 7.12(4),
we can find the optimum pattern. In the case of the 17 neurons
shown in Fig. 7.12(3), the total number of possible patterns
reaches 100000000000000000 (10
17
), which practically prohibits
computation, although it is theoretically possible. In technical terms,
this solution brings about an exponential explosion of computation
time. In the present example, the synaptic values are limited to
one-digit decimal integers. If this limitation were removed and any
real number could be used, there would have been no possibility of
computation.
To avoid this problem, we do not check all possibilities one by
one, but instead we check areas with higher possibilities of finding
the solution sequentially until a suboptimal solution is identified. A
suboptimal solution is a practically acceptable solution that would
be theoretically close to, though is not itself, an optimal solution.
This approach was devised in the study of artificial intelligence and
adopts the idea of biological evolution. Hence, the method is named
“machine evolution.”

June 12, 2012 18:12 PSP Book - 9in x 6in 07-Junichi-Takeno-c07
116 Artificial Neural Networks and Machine Evolution
Figure 7.13. Biological evolution approach.
One of the popular machine evolution approaches is introduced
now. Assume that eight robots survive in the n-th generation
(Fig. 7.13). We evaluate the fitness function of each robot with
respect to its environment on a 100-point scale.
The fitness functions are assigned by humans. For example,
the evaluation mark would increase the faster a robot runs.
The survival-of-the-fittest principle is applied to the robots after
evaluation. Various discussions exist regarding how many marks
would qualify for the fittest. We decide to select “die” for four robots
with poor evaluations, and the remaining four robots survive as the
fittest (selection). These four surviving robots, with more than 60
points as the evaluation mark, are mated. Various mating methods
are conceivable. Only the surviving robots are mated or some dead
ones may be recovered temporarily for mating purposes. The mating
problem will be discussed in detail later.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.