

June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
Kitamura’s Robot 137
Figure 8.4. A rough sketch of Kitamura’s experiments.
higher organisms are considered to have complex consciousness
and are placed on the higher levels. Kitamura, thus, believes that all
living organisms have a consciousness corresponding to their level
of complexity.
Consciousness occurs, according to Kitamura, when transition to
a higher conscious level occurs when the behavior at the current
conscious level is suppressed. As many researchers agree, this is
knowledge obtained from observing that when a human experiences
that the current action is suddenly suppressed, the human’s
conscious activities are activated (i.e., they become conscious) and
attempt to solve the problem.
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
138 Machine Consciousness
Kitamura learned about conscious levels and their correspond-
ing behaviors from philosopher Thao and applied it to the design of
his consciousness architecture.
The author highly evaluates Kitamura’s consciousness architec-
ture, a machine consciousness theory, because it coincides well with
the events obtained from phenomenological knowledge.
Brooks’ standpoint is, however, basically behavioristic, and he
does not acknowledge the conscious activities of humans and
representations. It is therefore highly possible that Brooks would
not accept Kitamura’s layered consciousness and would disprove of
it saying that everything can be explained by layered behaviors only.
Returning to our main theme, Kitamura describes the future
course of development as follows. The first task to solve is related to
the “emergence of I,” that is, the problem of “first-person properties
of consciousness.” Kitamura believes that this problem can be solved
by further increasing the levels of consciousness. According to
Kitamura, the “emergence of I” occurs when consciousness has
been elevated to the highest level where there is no further activity
capable of enhancing the present comfort. This applies, Kitamura
continues, to living organisms of low conscious levels as well.
Organisms at level 5, for example, can be conscious of the
“emergence of I” but cannot speak of it simply because their
consciousness is not high enough to engage in language activities.
Kitamura further says that it is difficult at this stage to correctly
propose behaviors corresponding to conscious levels exceeding
level 5, but such problems as symbolic processing can be solved by
further elaborating conventional AI knowledge.
The duality of self-consciousness is described as follows.
According to Kitamura, when “I” recall past experiences at the
time when “I am emergent,” the duality of consciousness that
“I think of myself” may be said to be achieved. Regarding
embodiment, Kitamura says it is a difficult technical task for a
robot to become conscious that its limbs are its own. To solve
this technical task, Kitamura continues, the robot needs to use the
body schema of its own limbs. Kitamura says that the problems of
the consciousness of others, feelings, and thought and the problem
of chaos remain unsolved and will be continually studied in the
future.
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
Jun Tani’s Robot 139
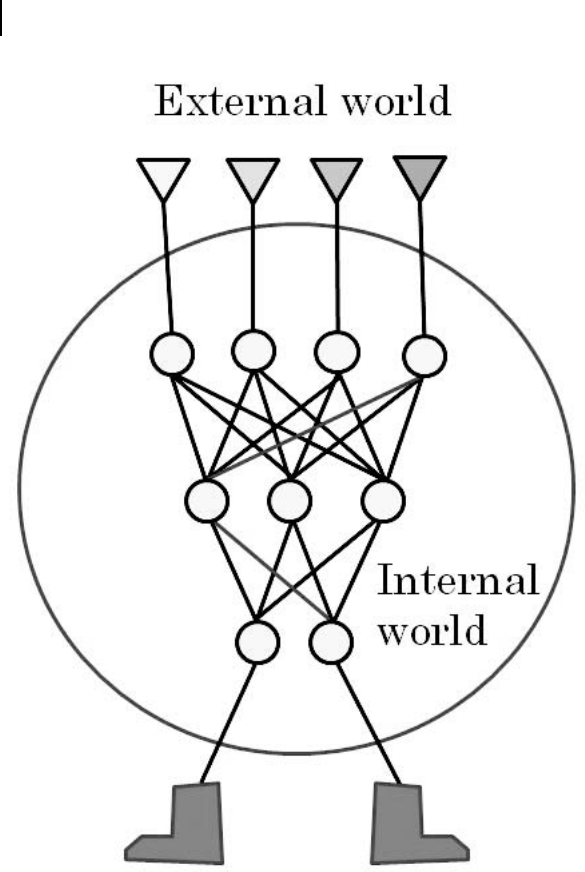
8.3 Jun Tani’s Robot
Jun Tani built a conscious machine based on the belief that the
conflict between the external and internal worlds gives rise to self-
consciousness. He developed this idea after studying the theories of
Martin Heidegger and many other philosophers and psychologists.
The external world means the environment of the robot as
captured by its sensors. The internal world consists of a series
of artificial neural networks accommodated inside the machine
(Fig. 8.5).
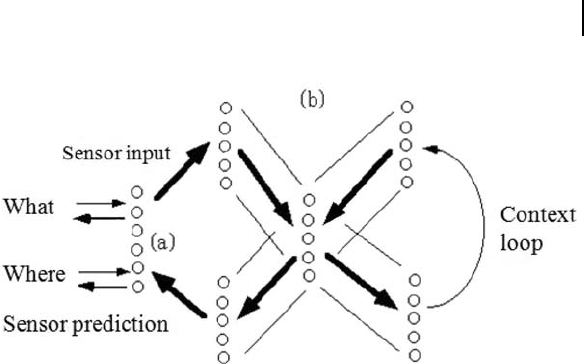
Tani proposed an open dynamic structure featuring multiplexed
neural networks and built it into his conscious machine (Fig. 8.6).
The circuitry consists of a group of neural units (a) playing the role
of a window for interaction between external and internal worlds
and a cognition and prediction unit (b) including context loops. The
context loops are used to predict the next occurring movements and
objects based on past experience and have a memory to remember
events in the external world.
Section b comprises a set of recurrent neural networks (RNN) re-
sponsible for two processes: cognizing sensor inputs and predicting
the next occurring sensor values.
Let us assume that Tani’s machine has learned enough in the
external world, and as a result, it is expected to perform smooth
movements. Actually, the machine has succeeded in learning smooth
movements. Section b of the machine constantly outputs prediction
values of “What and Where” to section a for collation with the
present values. Smooth movement is assured when the prediction
and external world coincide with each other. If the prediction fails
to match, the robot’s movement is not smooth. Look at the internal
state of the robot at this time. You will see sections a and b are
alternately stable and unstable. It is stable when the prediction
agrees with the external world and unstable when it fails to agree.
As discussed in Chapter 7, the recurrent neural network has
four states: divergence, convergence, orbiting, and chaos. We can
safely exclude divergence because this robot has sufficiently learned
in the external environment. The aforementioned stable state is
equal to convergence. If RNNs repeat convergence even though their
state is incessantly variable as the machine moves, the smooth
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
140 Machine Consciousness
Figure 8.5. External and internal worlds.
movement of the machine is achieved. Orbiting, including quasi-
orbiting, can be said to be a quasi-stable state. After all, the machine
can continue to move as long as stable and quasi-stable conditions
are maintained in the real world. Continuous stable movement thus
June 25, 2012 12:37 PSP Book - 9in x 6in 08-Junichi-Takeno-c08
Jun Tani’s Robot 141
Figure 8.6. Open dynamic architecture.
means agreement between the predictions and the external world.
The RNNs, while learning information about the external world
that they successfully predicted, further strengthen their capacity to
predict.
What happens, then, if we arbitrarily change the external world
which the robot has learned? The RNNs get unstable and enter
a state called chaos. When the machine enters the chaos state,
the orbit is seriously distorted. In short, prediction and reality do
not match, and it is no longer possible to predict. If this state is
allowed to continue, the RNNs cannot escape from chaos. Tani at
this point incorporates an arbitrator mechanism in his architecture.
The arbitrator reduces the impact of the predicted values when in
chaos. As a result, the machine is capable of re-learning information
about the external world. According to Tani’s interpretation, self-
consciousness occurs in the machine when it is in chaos. Tani also
explains that the state where the machine runs stably corresponds
to non self-consciousness. He describes self-consciousness referring
to Heidegger’s hammer.
When a carpenter uses his hammer without any difficulty, the
carpenter and the hammer are in unity, but when problems recur,
they are separated and the carpenter is conscious of the hammer
and he himself becomes self-conscious. This theory is supported by
many phenomenological philosophers and psychologists.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.