
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
208 Physical Demonstration of Successful Mirror Image Cognition by a Robot
Unlike humans and animals, every part of a robot allows scientific
investigation, and the process used is understandable for lay people.
I am now developing a robot to scientifically verify mirror image
cognition. If a robot capable of scientifically proving mirror image
cognition is available, we will be able to clarify the mechanism of
mirror image cognition of humans by analyzing the robot in detail.
Gallup formulated mirror tests to evaluate the existence of high-
level cognition ability. His tests are designed to check whether
animals can tell their own images in a mirror. The mirror test was re-
portedly successful when conducted with chimpanzees, orangutans,
dolphins, Indian elephants, and magpies. It is impossible, however,
to scientifically research how these animals acquired the ability to
cognize their mirror image. This is also true of humans.
Detailed scientific research is possible with robots. The author
believes that demonstrations by robots will teach us their self-
recognition process and assist us in scientifically proving the exis-
tence of consciousness in humans too. The author believes that the
robots are mirrors showing us scientifically the existence of the self.
10.3 Development of a Robot to Demonstrate Mirror
Image Cognition
Two methods are available: an engineering-based approach and
a conscious system structure approach. The former attempts to
achieve the goal through engineering without discussing human
consciousness.
Gold and Haikonen have announced that their mirror tests
“appeared” to be successful. It is very difficult, however, to describe
human functions such as cognition and consciousness (Michel et al.,
2004; Haikonen, 2007).
It is possible, for example, to produce robots capable of cognizing
the members of a human family and displaying heartwarming facial
expressions without using the functions of human cognition and
consciousness. As this example shows, it is possible to achieve
the functions of human cognition and consciousness using a set
of recognition functions and drive programs totally irrelevant to
consciousness and cognition. Nevertheless, the creation of a robot
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
Stages in the Development of a Conscious Robot 209
capable of mirror image cognition is very difficult when considering
several points that will be described later. The author calls this
procedure an “engineering-based approach.” Obviously, a robot
created using this approach cannot describe any little bit of the
phenomena of human cognition and consciousness. This type of
technique may be useful but generally does not touch the root of the
research theme of the author.
With the conscious system structure approach, the subjective
phenomenon occurring within the self called consciousness can be
treated as a physical phenomenon.
Subjective functions can be built into a robot (Tani, 2002;
Kawato, 2000). The purpose of Tani’s and Kawato’s studies is
to clarify the truth of subjective phenomena objectively and
physically through robot demonstrations. This technique belongs to
scientific positivism. The author uses the conscious system structure
approach.
Compared with the simple engineering-based approach, the
conscious system structure approach has a higher chance of making
a major breakthrough in the study of consciousness. This is because
in the former method, part of the functions of a whole system
is created individually, i.e., piece by piece, whereas in the latter
method, the principle of the overall picture of consciousness
can be described when successful. Specifically, with the former
method, it is almost impossible to present futuristic and constructive
hypotheses, whereas with the latter method, it is highly possible that
a large number of hitherto unsolved problems may be collectively
solved and many hypotheses full of interesting suggestions can be
presented. If I were asked which method I would take as a scientist,
I would select the latter because I acknowledge the scientific
rationality of the heliocentric theory of Copernicus (Nicolaus, 1473–
1543) compared with the geocentric theory.
10.4 Stages in the Development of a Conscious Robot
The author attempts to build a conscious machine. Although
consciousness is a subjective experience, we consider it to be a
physical phenomenon and have developed consciousness with a
machine system.
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
210 Physical Demonstration of Successful Mirror Image Cognition by a Robot
Machine systems, including robots, allow us to perform objective
and scientific studies and observations. They provide us a solid
base for the scientific observation of subjective phenomena. We can
understand the phenomena of consciousness as an objective reality
using machine systems.
Steps of Study
(a1): Define the meaning of consciousness.
(a2): Define a concept model based on the definition of con-
sciousness.
(a3): Replace the concept model with neural models.
(a4): Mount the neural models on a robot.
(a5): The robot achieves mirror image cognition.
Steps a1 through a4 were discussed in the previous chapter. Step
a5 is described in this chapter.
There are four important points to consider when developing
mirror image cognition robots. No human has ever seen his or her
own face since they were born. Humans have little prior information
about the image of themselves, their face in particular.
First, in consideration of the above fact, the robot to be used in
the study of mirror image cognition should not be given perfect prior
information about itself. Humans cannot cognize their own image in
a mirror when they are born. They can do so at about the age of two.
Second, to solve the mystery of human consciousness, we need to
describe the process of the development of cognition from the stage
of inability to cognize the self image in a mirror through to the stage
of being able to do so.
Third, consider that mirror reflex information is not always
perfect. Reflectance and planarity are not always 100%. Even if the
robot possesses information about itself, the mirror-reflected infor-
mation may not theoretically agree with the original information.
Fourth, the functions of the robot arising from the built-
in computer program must be able to describe facts that are
generally known to have derived from the functioning of human
consciousness.
These facts include, among others, self-recognition, multiplicity
of consciousness, and consciousness of others.
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
Conscious Robot and Mirror Image Cognition Experiments 211
10.5 Conscious Robot and Mirror Image Cognition
Experiments
We use Khepera II, a commercially available small robot, and
mounted the neural network program on the robot. The program
uses recurrent networks called MoNADs as the basic module (Fig.
9.11). Each network has a hierarchical structure consisting of three
modules (Fig. 10.2).
The operating mechanism of a MoNAD is described as follows.
A MoNAD performs neuro-computation to determine the current
behavior and cognitive representation based on information about
the external world and on cognitive representation and behavior
information one step earlier. The derived information is used
recurrently. The use of information one step earlier means that
the current behavior is decided by taking into consideration past
information (use of experience).
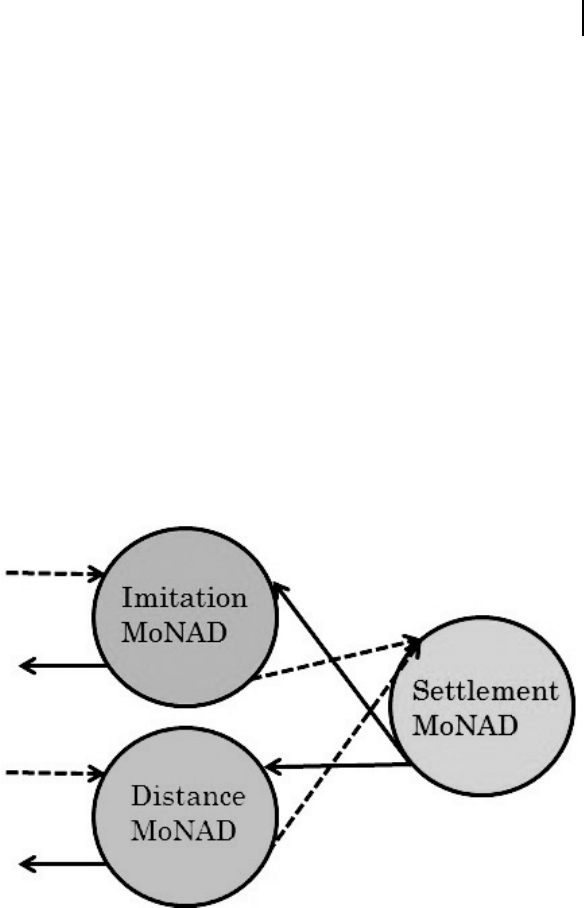
Figure 10.2. The networks for the experiments are arranged hierarchi-
cally with three MoNADs. The imitation MoNAD interprets the behavior of
the other and instructs the motors to behave in the same way. The distance
MoNAD measures the distance to the other. It instructs the motors to move
back if the distance is small and to move forward if the distance is large. The
settlement MoNAD restricts the behavior of related subordinate MoNADs.
June 25, 2012 14:20 PSP Book - 9in x 6in 10-Junichi-Takeno-c10
212 Physical Demonstration of Successful Mirror Image Cognition by a Robot
The robot imitates the behavior of the second partner robot in
the mirror using MoNADs. The robot further cognizes the behavior
of the self and the other simultaneously and calculates the success
rate of behavior imitation (coincidence of behavior between the self
and the other) using MoNADs. The coincidence success rate was
about 70% in our experiments (Takeno et al., 2005). Although the
success rate was not 100%, we came to the conclusion that the robot
could physically discover its mirror image 100% of the time. Since
the robot achieves mirror image cognition of the self, we call this
robot incorporating the hierarchical MoNAD networks a conscious
robot.
10.5.1 The Conscious Robot
The author incorporated the consciousness system in the robot
using three kinds of MoNADs (Fig. 10.2):
• Imitation MoNAD
• Distance MoNAD
• Settlement MoNAD
When the robot repeats an imitation, the consciousness system
continually calculates cognitive behaviors of the self and the other
simultaneously. The blue LED lights up when an imitation is
successful as determined by the calculation (Fig. 10.3). Imitation
coincidence rates are recorded. When the coincidence rate exceeds a
certain value, the other entity is interpreted as the self. The imitation
MoNAD interprets the behavior of the other and instructs the motors
to perform the same behavior (a simple inference system). The
distance MoNAD measures distance to the other. If the distance is
small, the motor is instructed to back up and if it is large, the motor
is told to move forward (a simple feelings system). The settlement
MoNAD controls the behavior of the relevant lower-level MoNADs.
It is, however, not a central control tower such as a homunculus
because its behavior is determined by the information supplied
by lower level MoNADs (a simple association system). The LED
controller compares the representations of the imitation MoNADs
and fires the blue LED when the behaviors of the self and the other
coincide with each other.
..................Content has been hidden....................
You can't read the all page of ebook, please click here login for view all page.