
Chapter 12. Exploring Control Systems Through Simulation
The next several chapters describe—in the form of case studies—a number of control problems and also show how they can be solved using feedback mechanisms. The case studies are treated via simulations; the simulation code is available for download from the book’s website.
The ability to run simulations of control systems is extremely important for several reasons.
The behavior of control systems, specifically of feedback loops, can be unfamiliar and unintuitive. Simulations are a great way to develop intuition that is required to solve the kind of practical problems that arise in real-world control systems.
Extensive experimentation on real production systems is often infeasible for reasons of availability and cost. Even when possible, experiments on real systems tend to be time-consuming (the time scale of many processes is measured in hours or even days); if they involve physical equipment, they can be outright dangerous.
Implementing controllers, filters, and other components in a familiar programming language can bring abstract concepts such as “transfer functions” to life. In this way, simulations can help to make some of the theoretical concepts more concrete.
The parts of the simulation outside the controlled system—that is, the components of the actual control loop proper—will carry over rather directly from the simulation to a “real” implementation.
Finally, it is unlikely that any control system will be deployed into production unless it has proven itself in a simulated environment. Simulation, therefore, is not just a surrogate activity but an indispensable step in the design and commissioning of a control system.
The Case Studies
In the following chapters, we will discuss a variety of case studies in detail. I think each case study models an interesting and relevant application. In addition, each case study demonstrates some specific problem or technique.
- Cache hit rate:
How large does a cache have to be to maintain a specific hit rate? This case study is a straightforward application of many “textbook” methods. It demonstrates the use of “event time” (as opposed to “wall-clock time”—see the following section in this chapter).
- Ad delivery:
How should ads be priced to achieve a desired delivery plan? We will find that this system exhibits discontinuous dynamics, which makes it susceptible to rapid control oscillations.
- Server scaling:
How many server instances do we need to achieve a desired response rate? The problem is that the desired response rate is 100 percent. It is therefore not possible for the actual output to straddle the setpoint, so we need to develop a modified controller to handle this requirement.
- Waiting queue control:
How many server instances do we need to manage a queue of pending requests? This example appears similar to the preceding one, but the introduction of a queue changes the nature of the problem significantly. We will discuss ways to control a quantity (such as the queue length) that is not fixed to one specific value but instead must be allowed to float. This example also demonstrates the use of nested (or “cascaded”) control loops and the benefits of derivative control.
- Cooling fan speed:
How fast must CPU cooling fans spin in order to achieve a desired CPU temperature? This case study shows how to simulate a physical process occurring in real time.
- Graphics engine resolution:
What graphics resolution should be used to prevent memory consumption from exceeding some threshold? In this example, the control input is a nonnumeric quantity that can assume only five discrete “levels.” Since PID control is not suitable for such systems, we show how to approach them using an incremental on/off controller.
Modeling Time
All processes occur over time, and control theory, in particular, is an attempt to harness the controlled system’s time evolution. Simulations, too, are all about advancing the state of the simulated system from one time step to the next.
Control Time
For phenomena occurring in the physical world (mechanical, electrical, chemical processes, and so on), “time” is an absolute concept: it just passes, and things happen according to laws of nature. For computer systems, things are not as clear because computer systems do not necessarily “evolve” by themselves according to separate and fixed laws. A software process waiting for an event does not “evolve” at all while it waits for an event to occur on the expected port! (Anybody who has ever had to deal with a “hung” computer will recognize this phenomenon.) So when designing control systems for computer systems, we have a degree of freedom that most control engineers do not—namely, a choice of time.
This is a consequence of using a digital controller. Classical, analog control systems were built using physical elements (springs and dampers, pipes and valves, resistors and capacitors). These control systems were subject to the same laws of nature as the systems they controlled, and their action progressed continuously in time. Digital controllers do not act continuously; they advance only in discrete time steps (almost always using time steps of fixed length, although that is not strictly required). If the controlled system itself is also digital and therefore governed by the rules of its application software, then this introduces an additional level of freedom.
There are basically two ways that time evolution for computer systems can be designed: real time or control time.
- Real or “wall-clock” time:
The system evolves according to its own dynamics, independently (asynchronously) from control actions. Control actions will usually occur periodically with a fixed time interval between actions.
- Control or “event” time:
The system does not evolve between control events, so all time development is synchronous with control actions. In this case, we may synchronize control actions with “events” occurring in the physical world. For instance, we take action if and only if a message arrives on a port; otherwise, the system does not evolve.
When we are trying to control a process in the physical world, only the first approach is feasible: the system evolves according to its own laws, and we must make sure that our control actions keep up with it. But when developing a control strategy for an event-driven system, the second approach may be more natural. (In Chapter 13 we will see an example of “event” time; in Chapter 17 we will see how to connect simulation parameters with “wall-clock” time.)
Simulation Time
In a simulation, time naturally progresses in discrete steps. Therefore, the (integer) number of simulation steps is the natural way to tell time. The problem is how to make contact with the physical world that the simulation is supposed to describe.
In the following, we will assume that each simulation step has exactly the same duration when measured in wall-clock time. (This precludes event-driven situations, where the interval between successive events is a random quantity.) Each step in the simulation corresponds to a specific duration in the real world. Hence we need a conversion factor to translate simulation steps into real-world durations.
In the simulation framework, this conversion factor is implemented as a variable DT, which is global to the feedback package. This variable gives the duration (in wall-clock time) of a single simulation step and must be set before a simulation can be run. (For instance, if you want to measure time in seconds and if each simulation step is supposed to describe 1/100 of a second, then you would set DT = 0.01. If you measure time in days and take one simulation step per day, then DT = 1.)
The factor DT enters calculations in the simulation framework in two ways. First, the convenience functions for standard loops (see later in this chapter) write out simulation results at each step for later analysis, including both the (integer) number of simulation steps and the wall-clock time since the beginning of the simulation. (The latter is simply DT multiplied by the number of simulation steps.) The second way that DT enters the simulation results is in the calculation of integrals and derivatives, both of which are approximated by finite differences:
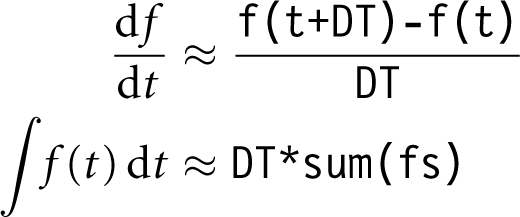
where fs = [ f0, f1, f2, ... ] is a sequence holding the values of f(t) for all simulation steps so far.
It is a separate question how long or short (in wall-clock time) you should choose the duration of each simulation step to be. In general, you want each simulation step to be shorter by at least a factor of 5 to 10 than the dominant time scale of the system that you are modeling (see Chapter 10). This is especially important when simulating systems described by differential equations, since it ensures that the finite-difference approximation to the derivatives is reasonably accurate.
The Simulation Framework
The guiding principles for the design of the present simulation framework were to make it simple and transparent in order to demonstrate the algorithms as clearly as possible and to encourage experimentation. Little emphasis was placed on elegant implementations or runtime efficiency. The code presented is intended as a teaching tool, not as building material for production software!
In contrast to some other existing simulation frameworks for control systems, components are not specified by their frequency-domain transfer functions. Instead, algorithms are developed and implemented “from scratch” based on behavior in the time domain. This allows us to consider any behavior, whether or not a frequency-domain model is readily available. The purpose is to make it easy to develop one’s own process models, without necessarily having to be comfortable with frequency-domain methods and Laplace transforms.
Components
All components that can occur in a simulation are subclasses of Component in package feedback. This base class provides two functions, which subclasses should
override. The work() function takes a single scalar
argument and returns a single scalar return value. This function encapsulates the dynamic
function of the component: it is called once for each time step. Furthermore, a monitoring() function, which takes no argument, can be
overridden to return an arbitrary string that represents the component’s internal state.
This function is used by some convenience functions (which we’ll discuss later in this
chapter) and allows a uniform approach to logging. Having uniform facilities for these
purposes will prove convenient at times.
The complete implementation of the Component base class looks like this:
class Component:
def work( self, u ):
return u
def monitoring( self ):
# Overload, to print addtl monitoring info to stdout
return ""Plants and Systems
All implementation of “plants” or systems that we want to control in simulations should extend the Component base class and override the work() function (and the monitoring() function, if needed):
class Plant( Component ):
def work( self, u ):
# ... implentation goes hereWe will see many examples in the chapters that follow.
Controllers
The feedback package provides an
implementation of the standard PID controller as a subclass of the Component abstraction. Its constructor takes values for the three controller
gains (kp,
ki, and
kd; the last one defaults to zero). The
work() function increments the integral term,
calculates the derivative term as the difference between the previous and the current value
of the input, and finally returns the sum of the contributions from all three terms:
class PidController( Component ):
def __init__( self, kp, ki, kd=0 ):
self.kp, self.ki, self.kd = kp, ki, kd
self.i = 0
self.d = 0
self.prev = 0
def work( self, e ):
self.i += DT*e
self.d = ( e - self.prev )/DT
self.prev = e
return self.kp*e + self.ki*self.i + self.kd*self.dObserve that the factor DT enters the calculations twice: in the integral term and when approximating the derivative by the finite difference between the previous and the current error value.
A more advanced implementation is provided by the class AdvController. Compared to the PidController, it has two additional features: a “clamp” to prevent integrator windup and a filter for the derivative term. By default, the derivative term is not smoothed; however, by supplying a positive value less than 1 for the smoothing parameter, the contribution from the derivative term is smoothed using a simple recursive filter (single exponential smoothing).
The clamping mechanism is intended to prevent integrator windup. If the controller output exceeds limits specified in the constructor, then the integral term is not updated in the next time step. The limits should correspond to the limits of the “actuator” following the controller. (For instance, if the controller were controlling a heating element, then the lower boundary would be zero, since it is in general impossible for a heating element to produce negative heat flow.) This clamping mechanism has been chosen for the simplicity of its implementation—many other schemes can be conceived.
class AdvController( Component ):
def __init__( self, kp, ki, kd=0,
clamp=(-1e10,1e10), smooth=1 ):
self.kp, self.ki, self.kd = kp, ki, kd
self.i = 0
self.d = 0
self.prev = 0
self.unclamped = True
self.clamp_lo, self.clamp_hi = clamp
self.alpha = smooth
def work( self, e ):
if self.unclamped:
self.i += DT*e
self.d = ( self.alpha*(e - self.prev)/DT +
(1.0-self.alpha)*self.d )
u = self.kp*e + self.ki*self.i + self.kd*self.d
self.unclamped = ( self.clamp_lo < u < self.clamp_hi )
self.prev = e
return uActuators and Filters
Various other control elements can be conceived and implemented as subclasses of
Component. The Identity element simply reproduces its input to its output—it is useful mostly
as a default argument to several of the convenience functions:
class Identity( Component ):
def work( self, x ): return xMore interesting is the Integrator. It maintains a cumulative sum of all its inputs and returns its current value:
class Integrator( Component ):
def __init__( self ):
self.data = 0
def work( self, u ):
self.data += u
return DT*self.dataBecause the Integrator class is supposed to calculate the integral of its inputs, we need to multiply the cumulative term by the wall-clock time duration DT of each simulation step.
Finally, we have two smoothing filters. The FixedFilter calculates an unweighted average over its last n inputs:
class FixedFilter( Component ):
def __init__( self, n ):
self.n = n
self.data = []
def work( self, x ):
self.data.append(x)
if len(self.data) > self.n:
self.data.pop(0)
return float(sum(self.data))/len(self.data)The RecursiveFilter is an implementation of the simple exponential smoothing algorithm
that mixes the current raw value xt and the previous smoothed value st–1 to obtain the current smoothed value st:
class RecursiveFilter( Component ):
def __init__( self, alpha ):
self.alpha = alpha
self.y = 0
def work( self, x ):
self.y = self.alpha*x + (1-self.alpha)*self.y
return self.yBecause all these elements adhere to the interface protocol defined by the Component base class, they can be strung together in order to create simulations of multi-element loops.
Convenience Functions for Standard Loops
In addition to various standard components, the framework also includes convenience functions to describe several standard control loop arrangements in the feedback package. The functions take instances of the required components as arguments and then perform a specified number of simulation steps of the entire control system (or control loop), writing various quantities to standard output for later analysis. The purpose of these functions is to reduce the amount of repetitive “boilerplate” code in actual simulation setups.
The closed_loop() function is the most
complete of these convenience functions. It models a control loop such as the one shown in
Figure 12-1. It takes three mandatory
arguments: a function to provide the setpoint, a controller, and a plant instance.
Controller and plant must be subclasses of Component. The
setpoint argument must be a reference to a function
that takes a single argument and returns a numeric value, which will be used as a setpoint
for the loop. The loop provides the current simulation time step as an integer argument to
the setpoint function—this makes it possible to let the setpoint change over time. These
three arguments are required.

The remaining arguments have default values. There is the maximum number of simulation time steps tm and a flag inverted to indicate whether the tracking error should be inverted (e → –e) before being passed to the controller. This is necessary in order to deal with processes for which the process output decreases as the process input increases. (This mechanism allows us to maintain the convention that controller gains are always positive, as was pointed out in Chapter 4). Finally, we can insert an arbitrary actuator between the controller and the plant, or we can introduce a filter into the return path (for instance, to smooth a noisy signal). The complete implementation of the closed control loop can then be expressed in just a few lines of code:
def closed_loop( setpoint, controller, plant, tm=5000,
inverted=False, actuator=Identity(),
returnfilter=Identity() ):
z = 0
for t in range( tm ):
r = setpoint(t)
e = r - z
if inverted == True: e = -e
u = controller.work(e)
v = actuator.work(u)
y = plant.work(v)
z = returnfilter.work(y)
print t, t*DT, r, e, u, v, y, z, plant.monitoring()In any case, we must provide an implementation of the plant and of the function to be used for the setpoint. Once this has been done, a complete simulation run can be expressed completely through the following code:
class Plant( Component ):
...
def setpoint( t ):
return 100
p = Plant()
c = PidController( 0.5, 0.05 )
closed_loop( setpoint, c, p )All convenience functions use the same output format. At each time step, values for all signals in the loop are written to standard output as white-space separated text. Each line has the following format:
The remaining convenience functions describe a system for conducting step-response tests and an open-loop arrangement. There is also a function that conducts a complete test to determine the static, steady-state process characteristic.
Generating Graphical Output
The simulation framework itself does not include functionality to produce graphs—this task is left for specialized tools or libraries. If you want to include graphing functionality directly into your simulations, then matplotlib is one possible option.
The alternative is to dump the simulation results into a file and to use a separate graphing tool to plot them. The graphs for this book were created using gnuplot, although many other comparable tools exist. You should pick the one you are most comfortable with. (As a starting point, a brief tutorial on gnuplot is included in Appendix B.)