
At this point, you have some wonderful motors that are only spinning themselves. In this chapter, you'll be introduced to a variety of wheels and some criteria to aid you in selecting a pair of wheels for the line-following robot.
Most wheels consist of two parts (see Figure 19-1). First, there's the tire, which is the rubbery part that grips the surface. Then, there's a sturdy core, which distributes the motor force and retains the wheel's shape.

The portion of the tire that usually contacts the ground is called the tread. The sidewall is the portion of the tire that runs perpendicular to the tread, forming the shape of the tire. The shoulder is the transition area between the tread and the sidewalls. The bead is a lip designed to fit snuggly into the rim.
The rim is a made of a firm material that the tire rests against. On some wheels, individual spokes connect the rim to the hub. The hub attaches the wheel to the motor shaft or drive train.
Of course, there are many types of wheels that don't exactly fit this model. Even so, most of the basic terminology is still applicable.
The role of the wheel is to transfer the mechanical force from the motor to the ground. The robot's function, expected road conditions, and the abilities of the motor must be considered in determining the most suitable wheel.
Tires range from air-filled to solid (see Figure 19-2).

Tires that are filled with air or a compressed gas are called pneumatic tires. A sealed-pneumatic tire often has air in the middle completely surrounded by rubber, like a donut-shaped balloon. Pneumatic tires become flat under a load if they lose their air pressure.
A semi-pneumatic tire holds its shape from a combination of air and the strength of the sidewalls. The bead of the tire fits into and against the rim to resist air from squeezing out when the tire deforms upon hitting a bump. However, if air escapes, the tire doesn't become flat. Usually the tire is designed to allow the air to return as the bumped portion of the tire returns to its proper shape.
Foam tires are somewhat like sponges. They have tiny bubbles of air distributed throughout the tire material. Puncturing a foam tire won't cause it to flatten since very few air pockets are affected.
Solid tires have little or no air in them. They are difficult to puncture, with no effect on shape when they are punctured.
Air-filled tires tend to conform themselves to surfaces, thus providing maximum contact for traction. Air-filled tires compress on contact with small objects and particles, unlike solid tires that skip and lift up. The air acts as a shock absorber, which reduces wear of the motor and bearings.
Sealed pneumatic tires are rare in small sizes because most tire material is capable of retaining its shape against the forces present at that small a size without the need for air pressure. If sealed tires were more available, their performance would probably be equal to semi-pneumatic, with the risk of deflation with aging.
Solid tires wear well but don't grip as well, nor do they absorb bumps as well as pneumatic tires. However, because they don't squish, they add fewer errors to precision movements.
Tire shape makes a significant difference in traction and resistance. Look at the shape of the curve of the top of the tires in Figure 19-3. Some have broad, sloping shoulders; others have brief, square shoulders.

A rounded cross section tire, similar to a bicycle tire, only has a tiny portion touching the ground at any point. Because there is less contact with the surface, these tires are easy to turn and have a low-rolling resistance. Rolling resistance is the amount of friction generated against the road, which determines how easily the tire rolls forward and backward. Because of the limited road contact, rounded tires are more energy efficient, and thus a good choice for long-endurance runs.
Balloon tires protrude a bit over the sides of the rims. Balloon tires absorb shock well and can handle uneven surfaces. They're preferred for off-road and rough surfaces.
There are some in-between tire shapes on which the center portion is slightly flattened, but drops off at the shoulders. This offers a balance of characteristics, not being the best or worst performer in any category.
Flat tires provide the greatest traction on flat surfaces. This makes them great for delivering motor power to the road, although with the expense of having the highest-rolling resistance. Choose a flat tire shape for maximum pushing, pulling, and acceleration on smooth surfaces.
Greater width usually provides greater stability and traction to a tire, no matter what its shape (see Figure 19-4). Wide tires are also less likely to become stuck in parallel-aligned surface grooves.

On the other hand, skinnier tires have lower rolling resistances and can turn much more easily. They weigh less and don't take up as much room on the robot.
The style of the tread on the tire (see Figure 19-5) should be picked to match the surface and weather conditions the robot is expected to experience.
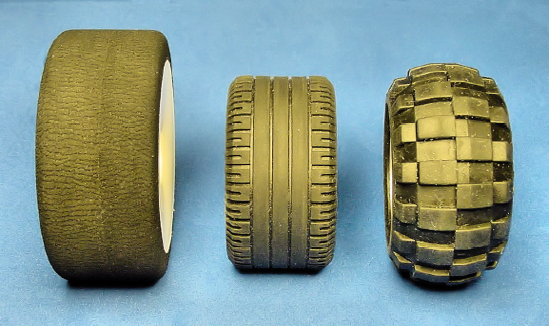
Slick tires provide maximum contact in dry, flat conditions. For this reason, professional racecars use slicks. But, under wet, gritty, or uneven conditions, slicks tend to lift up and lose traction. That's why most professional races are immediately halted (or delayed for tire changes) upon rain.
Grooved tires are similar to slicks, but with strips and patterns cut out of the tread. They provide decent traction on flat surfaces. On gritty or wet surfaces, the grooves direct particles away from the contact points and the grooves allow the tire to flex a little more. Because of this balanced performance in wet and dry weather, grooved or pattern-treaded tires appear on almost all street automobiles.
Knobby tires have aggressive bumps throughout. They're fantastic in uneven or loose soil conditions. Because household terrain isn't designed for lunchbox robots, knobby tires provide surprisingly good performance throughout the home. However, the bumpy tread leads to noisy, side-to-side walking behavior on flat surfaces. Knobby tires wouldn't be appropriate for precise, calculated movements or for pushing contests on flat surfaces.
Believe it or not, the diameter (think "height"—see Figure 19-6) of the tire is probably the most important characteristic of a robot's tires. The obvious effect is on how tall the robot will be. But, there is a much more significant effect.

The diameter of a tire radically affects torque and speed. The larger the diameter of the tire, the greater the resulting speed. The smaller the diameter, the greater the twisting (pushing, pulling) force.
If your robot is going too fast, switch to smaller diameter tires. If your robot is unable to move due to a large mass or lack of motor power, again, switch to smaller diameter tires. Conversely, if your robot is going too slowly or tends to spin its wheels when starting to move, switch to larger diameter tires.
Here's the formula for linear speed:
(RPM of loaded motor / 60 seconds in a minute) × wheel circumference in meters = linear speed in meters per second
Let's use Sandwich, the line-following robot, as an example. I don't really know the loaded RPM, so I'll use the no-load value of 137 RPM. This number was determined using a tachometer when the motor spun freely. Because the motor will actually be carrying a heavy load when placed down on the ground, the robot won't go any faster than the calculation indicates, but it almost certainly will go slower.
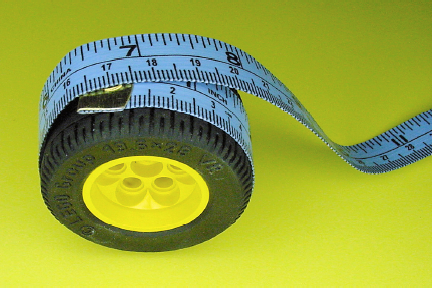
Determining the wheel circumference is easy with a cloth tape measure (see Figure 19-7). If you don't have access to a tape measure, wrap a strip of paper around the tire. Mark the spot of overlap and unroll the paper. You can then use a ruler to determine the length of the flat piece of paper with the mark. Sandwich's wheel circumference is about 16 cm, which is 0.16 m.
Plugging the numbers into the linear speed formula results as follows:
Sandwich example: (137 RPM / 60) × 0.16 m = 0.365 m/sThe robot should be able to complete a straight, 4-meter course in about...
linear course length in meters / linear speed = number of seconds to complete
Sandwich example: 4 m / 0.365 m/s = 11 sThe calculation indicates 11 seconds. In reality, it took the robot about 15 seconds. The difference between the calculated value and the measured value is the difference between no-load RPM and loaded RPM. You can work the measured value backwards to determine the approximate loaded RPM.
((linear course length in meter / number of seconds to complete) / wheel circumference in meters) × 60 seconds in a minute = RPM of loaded motor
Sandwich example: ((4 m / 15 s) / 0.16 m) × 60 = 100 RPMThat means the loaded RPM is about 100 RPM. Of course, the robot wiggles a bit rather than going in a straight line. So, the true loaded RPM is a little higher, but 100 RPM is accurate enough for predictive calculations. Now that we know the loaded speed, let's plug it back into the original formula to make sure it will now predict a 15-second course time.
Sandwich example:(100 RPM / 60) × 0.16 m = 0.267 m/sSandwich example:4 m / 0.267 m/s = 15 s
What happens if larger (22 cm) wheels are installed?
Sandwich example:(100 RPM / 60) × 0.22 m = 0.363 m/sSandwich example:4 m / 0.363 m/s = 11 s
Both calculations used the same values, except for the circumference of the wheels. The total course time decreased from 15 seconds to 11 seconds. Thus, by increasing the wheel diameter, the robot's speed increases proportionally.
The best choice of wheels depends on the terrain, but here are some suggestions.
- Indoor explorer:
Needs balanced abilities. Select wheel characteristics of pneumatic or foam, medium width, grooved tread, and large diameter.
- Outdoor explorer:
Needs shock resistance and traction on uneven surfaces. Select wheel characteristics of pneumatic, balloon shape, wide, knobby tread, and large diameter.
- Smooth-surface pushing robot:
It's all about torque and traction. Select wheel characteristics of pneumatic, flat shape, wide, slick tread, and small diameter. (As far as the number of wheels on a pushing robot: the more the merrier! See Figure 19-8.)
- Line-following robot:
Needs adept turning. Select wheel characteristics of solid, rounded shape, thin, slick tread, and medium diameter.

LEGO is very supportive of the robotic community. Their building blocks are of the finest quality and their wheels are no exception. LEGO rubber semi-pneumatic tires and firm solid tires are made in a variety of shapes and sizes (see Figure 19-9).

Here are some advantages of using LEGO wheels on your robot:
High quality
Wide selection
Classic and high-tech styles
Relatively inexpensive at about $3 for a large wheel (new), less for smaller wheels
Available online and at local stores
Consistently precise sizes make for flawlessly matched pair and sets
Interchangeable (almost all use the same size axle)
Based on all of these advantages, there's little reason to make your own wheels. It's very difficult to make a perfectly round wheel with a perfectly centered hub, much less make a matching pair. Wobbly wheels introduce tracking errors and don't look professional.
Wooden wheels are heavy and don't grip well. Like wooden tires, plastic tires slip because their material also has a lower coefficient of friction than do rubber tires. Additionally, both wooden and plastic tires don't conform themselves to the ground, causing less friction because of reduced contact area. Silicone coatings for treads don't match the conforming performance or looks of molded rubber.
Making your own decent wheels is painstaking and can be quite frustrating. And what happens when one breaks? With a LEGO wheel, they're always available from the manufacturer or from a collector.
A couple of factors go into selecting appropriate wheels for the line-following robot. To begin with, a minimum and maximum diameter must be considered.
Sandwich's motor shaft can be positioned as low as approximately 1.75 cm above the underside of the robot (see Figure 19-10).
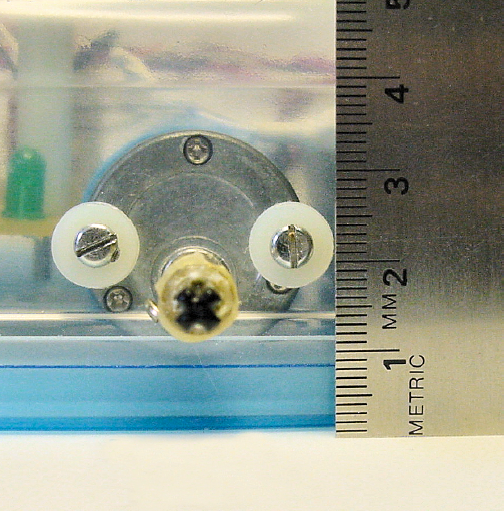
Therefore, to lift the robot up with margin for error, the wheels should have a radius of at least 2 cm.
radius × 2 = diameter 2 cm × 2 = 4 cm
The minimum wheel diameter must be no less than 4 cm.
The distance between the front of the robot and the center of the motor shaft is a little less than 10 cm (see Figure 19-11). A wheel with a diameter of 20 cm would lift the entire robot off the ground. When the motors kicked in, the robot would likely start spinning around and around the center of the shaft, jerking forward and backward.

Figure 19.11. A ruler measuring the distance from the front of the robot to the center of the motor shaft
It seems that 19 cm is the maximum diameter you could use and still have part of the robot's body touch the surface. Although this is technically correct, it would still present problems. Not only would the robot pop wheelies when starting up, but also the sensors would need to be angled strangely to face the floor.
Since larger wheels result in greater speed, the maximum diameter of the wheels is probably limited most by the reaction time of the motors, sensors, and brains. After all, the robot will drive off of the line if it moves too quickly for the electronics and motors.
The primary factors that determine speed have already been identified: raw motor speed, motor voltage, motor gear ratio, robot mass (load), and wheel diameter. (More complicated electronics can manipulate the pulses of power to the motors to reduce speed in spite of the factors stated here.)
Sandwich's gearhead motors were selected on the basis of size, cost, availability, and final shaft speed. Although a slightly slower-speed motor would have been desirable, we're stuck with the limited selection of motors that met the other criteria.
The most common occasions when a robot's mass is altered with respect to speed is when a robot's mass is lightened to make it faster. Adding deadweight to slow down a robot is an energy-inefficient method.
That leaves motor voltage and wheel diameter as the best remaining factors that we can vary to control Sandwich's speed. All of this is a long-winded way of saying that the maximum appropriate diameter of the wheels is going to be determined by the size at which the robot's speed begins to cause it to stray off of the course. Some experimentation is necessary to pick this diameter.
Based on the previous paragraphs, the wheel diameter is the most significant factor for this robot. The best choice for a line-following robot is solid, round, thin, and slick-treaded wheels.
I performed numerous experiments with different diameter wheels to see at what point Sandwich veered off a reasonable track. A wheel of approximately 4.5 cm seemed to provide the best combination of speed and agility.
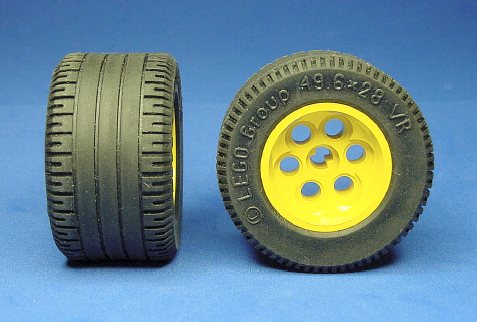
Sandwich rides on a pair of "49.6 × 28 VR" LEGO wheels (see Figure 19-12). They are about 5 cm in diameter. Despite the lack of other characteristics that would have been desirable for line following, I ended up picking semi-pneumatic, flat, wide, and grooved wheels simply for their diameter (and thus resulting speed).
If you can locate some, you should feel free to select 4.5 cm wheels that are solid, round, thin, and slick treaded.
At the time of this writing, new "49.6 × 28 VR" LEGO wheels don't seem to be available as separate items from LEGO, and the kits are all discontinued. See Table 19-1 for a list of known kits that contained these wheels.
Table 19.1. Some Kits That Contained 49.6 × 28 VR LEGO Wheels
Part Number | Description |
|---|---|
2556 | Shell Promotional Set / F1 Ferrari |
3804 | Robotics Invention System 2.0 |
3808 | Shadowstrike S70 |
8286 | 3 In 1 Car / Amphipower |
8440 | Formula Flash / Formula Indy Racer |
8445 | Indy Storm |
8456 | Fiber Optic Multi Set / Multi Racer Set |
8471 | Nitro Burner |
8472 | Street 'n' Mud Racer |
8473 | Nitro Race Team |
8479 | Barcode Multi-Set |
8482 | CyberMaster |
8483 | CyberMaster |
8516 | RoboRiders The Boss |
8520 | Millennium/Millennia Throwbot |
9719 | Robotics Invention System 1.0 |
9747 | Robotics Invention System 1.5 |
9794 | Team Challenge Set |
Although LEGO no longer sells these particular wheels, there are plenty of other sources. If you don't happen to have these wheels in your personal collection, you can find them online on eBay and other auction sites.
BrickLink.com is a fantastic source for all LEGO parts. For example, Sandwich's tire and hub can be found for less than a dollar from over 500 sellers. You can search by part number or description. (Note that BrickLink uses the term "tyre" instead of "tire" and that part #6594 also matches a Gas Transit set.)
BrickLink's sellers are independent and worldwide. So, you'll want to pay attention to reputation and location. You should try to purchase as many items as possible from the same seller to optimize the shipping cost.
Recall that, besides wheel diameter, the other option for controlling speed is battery voltage. Larger diameter wheels can be installed on Sandwich if a battery voltage less than 9 V is chosen.
LEGO rim #32057 and tire #32076 meet nearly all of the best characteristics for line following, although they have a slightly grooved tread design (see Figure 19-13).
The wheel has a diameter of 7 cm. The circumference can either be measured, or it can be calculated by the following formula:
π × diameter = circumference 3.1416 × 7 cm = 22 cm
By using 22 cm circumference wheels instead of 16 cm circumference wheels, the linear speed increases proportionally.
22 cm / 16 cm = 137.5%
To counteract the 37.5% increase in speed, the 9 V NiMH rechargeable battery can be replaced with a 6 V pack of four AAA-size cells. (Specifically, I used Rayovac rechargeable alkaline cells.) The reduction in voltage from 9 V to 6 V decreases speed proportionally.
6 V rechargeable alkaline rated voltage / 8.4 V actual NiMH rated voltage = 71.4%
Overall, the speed is about the same:
(22 cm / 16 cm) × (6 V / 8.4 V) = 98%
Not only does this give the robot more appropriate wheels, but also the AAA pack lasts seven times longer! The difference in mass between the two configurations is only about 5 grams more for the battery pack, or about +2.5 %.
If you choose 6 V (AAA pack) instead of 9 V (9 V battery) to permanently run your line-following robot, be sure to recalculate resistor values for the circuits. Otherwise the LEDs are going to be pretty dim.
LEGO currently manufacturers another wheel size that is an excellent alternative (see Figure 19-14). The rim is 30.4 × 20 (#56145) and the tire is 43.2 × 22 ZR (#44309). The narrower diameter improves line-following accuracy and the narrower width reduces friction.
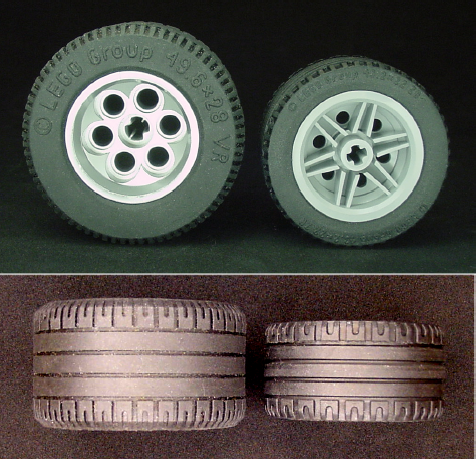
Figure 19.14. Out-of-production 49.6 × 28 VR (left) compared to current-production 43.2 × 22 ZR (right)
Table 19-2 lists some of the kits that include the 42.2 × 22 ZR wheel.
Table 19.2. Some Kits That Contain 43.2 × 22 ZR LEGO Wheels
Part Number | Description |
|---|---|
4893 | Revvin' Riders |
4895 | Motion Power |
4955 | Big Rig |
6752 | Fire Truck |
6753 | Highway Transport |
8140 | Tow Trasher |
8143 | Ferrari 1:17 F430 Challenge |
8156 | Ferrari FXX 1:17 |
8166 | Wing Jumper |
8167 | Jump Riders |
8271 | Wheel Loader |
8292 | Cherry Picker |
8354 | Exo Force Bike |
8355 | H.O.T. Blaster Bike |
8365 | Tuneable Racer |
8547 | Mindstorms NXT 2.0 |
8645 | Muscle Slammer Bike |
8652 | Enzo Ferrari 1:17 |
8667 | Action Wheelie |
8671 | Ferrari 430 Spider 1:17 |
8969 | Wheeling Pursuit |
9648 | Education Resource Set |
10196 | Grand Carousel |
Before long, the tires on a robot accumulate dirt and grime. Soiled rubber doesn't grip as well as clean rubber. One of the secrets to winning a robot sumo contest is to wipe off the tire surface after every match.
You can remove large chunks of dirt with an old toothbrush and water. Soaking in a bit of liquid dishwashing soap also helps.
To remove embedded contaminants, place the tires in an ultrasonic cleaner (see Figure 19-15). Micro-Mark sells the pictured ultrasonic cleaner, item # 82413, for $89.95. That particular model is fairly small, but is satisfactory for all LEGO wheels and circuit boards up to about 7 cm by 11 cm.

Figure 19.15. Ultrasonic cleaner (middle) with cleaning solution (left) and 99% isopropyl alcohol (right)
Ultrasonic cleaning machines vibrate with ultrasonic (above human hearing) waves. Millions of tiny bubbles form and pop, scrubbing every crevice of the immersed material.
Use either the cleaning solution designed for the machine or some water with a few drops of liquid dishwashing soap. Ultrasonic cleaning machines do a fantastic job of scrubbing by themselves. However, the surfactants in cleaning solutions significantly improve performance by binding the loosened particles to the fluid, so that they don't return to the object being cleaned.
Isopropyl or rubbing alcohol may degrade certain rubber and plastics over time. It's best to avoid using alcohol on wheels, just in case. You can clean circuit boards using 99% pure isopropyl alcohol. It's available at drugstores and supermarkets. Don't use "rubbing" alcohol or anything less than the full 99% purity, as oils, perfumes, or damaging chemicals may have been added.
There are other ways of providing movement for your robot, such as tractor treads and legs. But, wheels are more likely to result in a successful design when you're first starting out in the hobby.
Over the years, you'll probably amass a collection of wheels, just as you'll amass a collection of motors and other parts. When a robot idea strikes, you can then lay out the major parts in front of you, swapping pieces until the robot's body matches the fuzzy blueprint in your head.
If you've chosen LEGO wheels or wheels that have a standard hub, it will be easy to swap different sizes and shapes, even after the robot is finished. That allows for rapid prototyping and experimentation. In the next chapter, you'll learn how to make a coupler to connect any standard LEGO wheel to a motor shaft.