
Appendix II
Orientation of a Body‐fixed Coordinate System
The orientation of a body‐fixed coordinate system can be obtained by rotating the inertia coordinate system in space three times.
II.1 First Rotation
If the bases before rotation are ![]() , the bases after rotation are
, the bases after rotation are ![]() , the rotation axis is
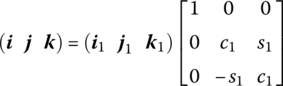
, the rotation axis is ![]() , and the rotation angle is θ1, substituting b = i1, a = i and λ = i into Equation (A.8) gives
, and the rotation angle is θ1, substituting b = i1, a = i and λ = i into Equation (A.8) gives
where ![]() , and similarly hereinafter.
, and similarly hereinafter.
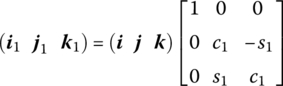
Substituting ![]() ,
, ![]() and
and ![]() into Equation (A.8), we get
into Equation (A.8), we get
Substituting ![]() ,
, ![]() , and
, and ![]() into Equation (A.8), we get
into Equation (A.8), we get
So
II.2 Second Rotation
The bases before rotation are ![]() , the bases after rotation are
, the bases after rotation are ![]() , the rotation axis is
, the rotation axis is ![]() , and the rotation angle is θ
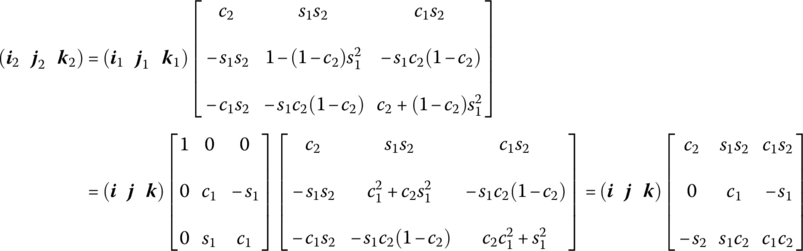
2. Similar to Equation (A.9), substituting these parameters into Equation (A.8), and considering
, and the rotation angle is θ
2. Similar to Equation (A.9), substituting these parameters into Equation (A.8), and considering

we get

namely
II.3 Third Rotation
The bases before rotation are ![]() , the bases after rotation are
, the bases after rotation are ![]() , the rotation axis is
, the rotation axis is ![]() and the rotation angle is θ
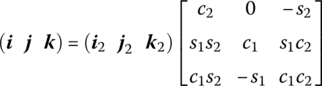
3. Similar to Equation (A.9), substituting these parameters into Equation (A.8) and considering
and the rotation angle is θ
3. Similar to Equation (A.9), substituting these parameters into Equation (A.8) and considering

we get

namely

So we get the coordinate transformation matrix from the body‐fixed coordinate system to the inertia coordinate system
