
Now that your robot can move, it is important to make sure it won't run into walls or other barriers. In this chapter, you'll learn the following topics:
- How to add sensors to your projects
- How to add a servo to your sensor
Before you begin, you'll need to decide which sensors to use. You require basic sensors that will return information about the distance to an object, and there are two choices—sonar and infrared. Let's look at each.
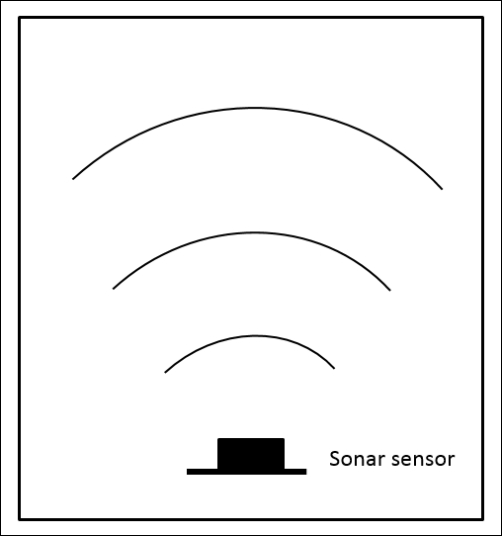
The sonar sensor uses ultrasonic sound to calculate the distance to an object. The sensor consists of a transmitter and receiver. The transmitter creates a sound wave that travels out from the sensor, as illustrated in the following diagram:
The device sends out a sound wave 10 times a second. If an object is in the path of these waves, the waves reflect off the object. This then returns sound waves to the sensor, as shown in the following diagram:
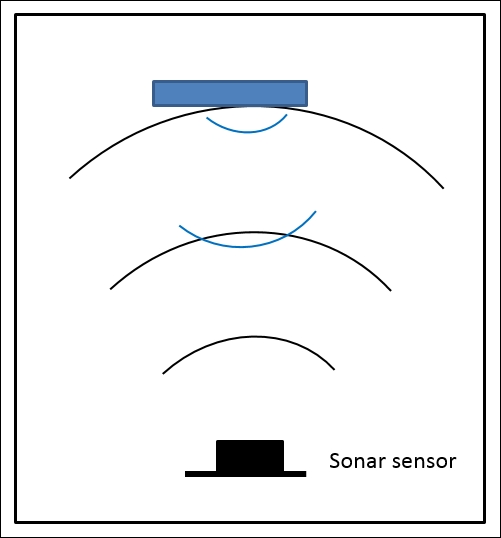
The sensor measures the returning sound waves. It uses the time difference between when the sound wave was sent out and when it returns to measure the distance to the object.
Another type of sensor is a sensor that uses infrared (IR) signals to detect distance. An IR sensor also uses both a transmitter and a receiver. The transmitter transmits a narrow beam of light and the sensor receives this beam of light. The difference in transit ends up as an angle measurement at the sensor, as shown in the following diagram:
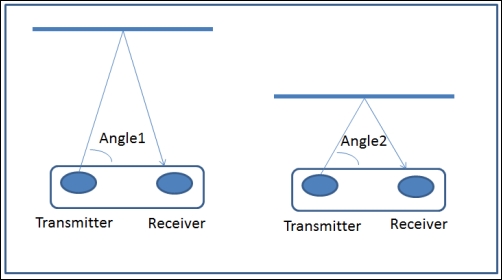
The different angles give you an indication of the distance to the object. Unfortunately, the relationship between the output of the sensor and the distance is not linear, so you'll need to do some calibration to predict the actual distance and its relationship to the output of the sensor. This will be discussed later in this chapter.