
9 Homopolar Linear Synchronous Motors (H-LSM)
Modeling, Design, and Control
Homopolar linear synchronous motors (H-LSM) are characterized, in general, by a passive long (fixed) variable reluctance (segmented) ferromagnetic secondary and a short primary on board of the vehicle (mover) that contains an iron core, which hosts both dc coils as long as the core and a three-phase ac winding [1–15].
The dc coil(s) produces a homopolar, pulsating, airgap magnetic field, which is used for controlled electromagnetic suspension of the vehicle; its 2p pole fundamental ac component interacts with the 2p pole three-phase ac winding to produce propulsion (braking) force. Thus, H-LSM potentially provides integrated suspension and propulsion functions for the vehicle (MAGLEV) with a passive iron low-cost, variable-reluctance-solid-ferromagnetic-segmented track. The 10/1 or more ratio between levitation (attraction) and propulsive force can “cover” entirely the vehicle suspension for an acceleration of about 1 m/s2, if the H-LSM primary weighs up to 10% of vehicle weight.
The recent progress in forced cooling and the IGBT (IGCT) inverter technologies lead to a low enough propulsion (levitation) equipment weight that allows enough room (weight) for a competitive payload. Besides transportation, H-LSM has been proposed for levitated transport in clean industrial rooms. The combined controlled propulsion-levitation properties of H-LSM are obtained at rather good overall efficiency (about 80% in low-speed industrial and urban transportation and about 85% for interurban (100 m/s or more) MAGLEVs). The power factor, above 0.8 in general, is very favorable for keeping the PWM converter on-board size (weight) and cost within reasonable bounds.
Though thoroughly investigated in the 1970s and 1980s up to a 4 ton experimental prototype (MAGNIBUS 01 [16]), the H-LSM has not been applied commercially yet for urban and interurban transport in spite of its high potential performance, as only two active guideway MAGLEV projects (in Germany and Japan) survived through the last decades among global economics ups and downs.
9.1 H-LSM: Construction and Principle Issues
A generic layout of H-LSM (Figure 9.1) emphasizes the following:
The short primary core may be made of longitudinal laminations separated by a solid body core (Figure 9.1a) or of transverse (U shape) lamination packs (Figure 9.1b), separated by insulation distancers to (from) the primary slots and teeth.
The dc winding may be built into one or two long coils that embrace the entire core length longitudinally.
The H-LSM is essentially a transverse field machine.
The passive, notched, ferromagnetic secondary, made of solid iron, exhibits magnetic anisotropy along the longitudinal (motion) direction; alternatively, it may be made of solid segments separated by air with 2τ periodicity (Figure 9.1c).
The τ –pole pitch ac winding may be made of two parts, each embracing one leg of the U core (Figure 9.2a) or may be made in one winding with eight-shape coils or straight coils (Figure 9.2b,c).
The eight-shape coils or the separate ac winding (Figure 9.2a) corresponds either to continuous solid, mild-steel-shifted (by τ) notched secondary or to straight secondary segments (Figure 9.1c). A typical winding is shown in Figure 9.3.
The separate windings may be executed with standard 1(2) layer chorded coils (to reduce end connections) or with three layers (only two of them are filled out) and y/τ = 2/3, when a further reduction of end connections is realized (Figure 9.4), if 2a/τ > 0.6–0.7.
As the three phases occupy different positions in the slots with respect to stator core, and their leakage inductances differ from each other, to balance the currents, the two windings have phases A and C in different positions in slots.
Only two out of three layers (in Figure 9.4) are occupied, but the free one may be used to blow air through, or a liquid, for better cooling.
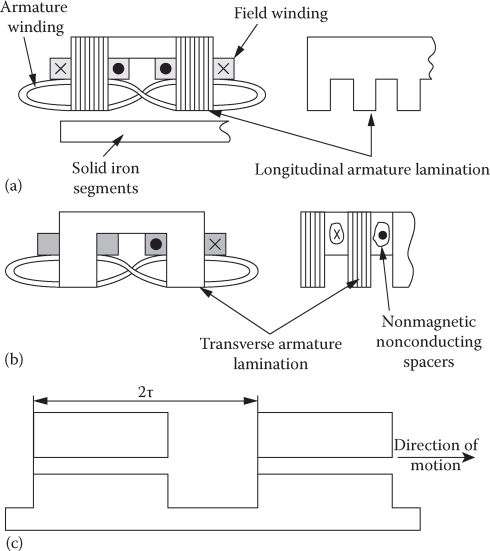
FIGURE 9.1 H-LSM layout (a) with longitudinal laminations primary core, (b) with transverse laminations, and (c) segmented and standard secondary solid care. (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Systems, John Wiley & Sons, New York, 1985.)
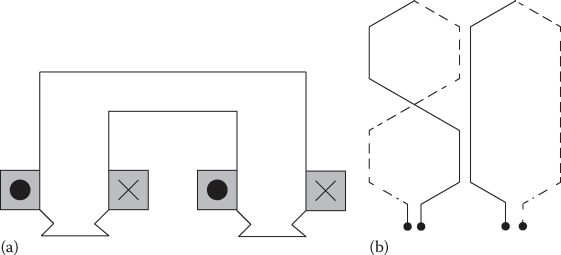
FIGURE 9.2 Armature coils: (a) segmented windings, (b) 8-shape (twisted) coils (c) straight coils. (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Systems, John Wiley & Sons, New York, 1985.)
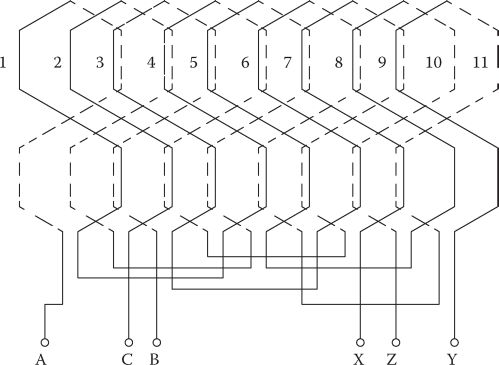
FIGURE 9.3 Typical q = 1 two-layer ac winding with 2/3 τ coil span with 8-shape coils (2p + 1 = 5-half-filled end poles as in LIMs). (After Boldea, I. and Nasar, S.A., Linear Motion Electromagnetic Systems, John Wiley & Sons, New York, 1985.)

FIGURE 9.4 Three-layer ac winding (with short end connections) y/τ = 2/3, q = 1, 2p + 1 = 5).
9.2 DC Homopolar Excitation Airgap Flux Density and AC emf E1
As the dc coils embrace the total H-LSM length, their airgap flux density pulsates with a period of 2τ but keeps the same polarity: opposite though below the two U core legs (Figure 9.5).
The secondary segment span (bps) varies around the pole pitch τ value; if larger levitation force is needed, τp = (1 ÷ 1.2)· τ, while when larger thrust is needed, τp=(0.7 ÷ 0.8)· τ; in the latter case, the normal (levitation) force is smaller. In general, to compromise between levitation and propulsion, τps ≈ 1.0 × τ − g, where g = 10 ÷ 12 mm for urban (interurban) transportation and may go down to 1.0 ÷ 2.0 mm for industrial applications with a few meter long travels.
The calculation of the maximum airgap flux density, B0g, is rather straightforward:
where
WFIF is the field current mmf
g1 is the airgap
kC is the Carter coefficient:
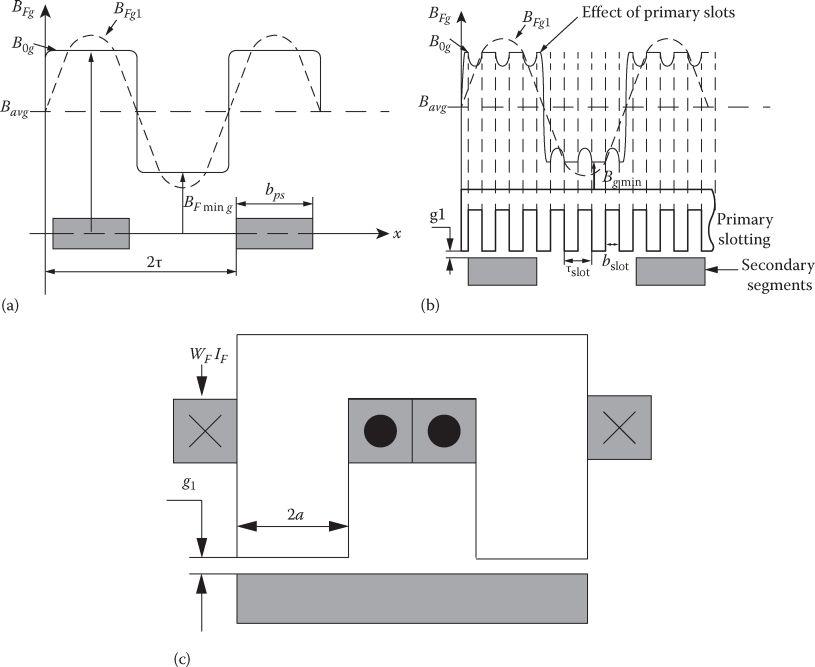
FIGURE 9.5 DC homopolar excitation airgap flux density: (a) ideal, (b) with primary slotting accounted for, and (c) transverse view.
kS is the magnetic saturation coefficient; due to large airgap, even for heavy magnetic saturation, the value of kS is expected to remain below 0.25. To obtain high normal and propulsion force densities, the value of B0g ≈ 1.3 ÷ 1.5 T. With an armature reaction flux density in the airgap of maximum 0.35 T, standard silicon U-shape transformer lamination cores may be used.
The minimum flux density in the airgap may be calculated using magnetic circuit method or FEM, but in general for g1 = 10 mm, Bgmin ≈ (0.2 ÷ 0.24)B0g.
In a simpler calculation, a larger equivalent fictitious airgap g2 may be used in between the track poles: g2 ≈ 4· g, if τ/g > 10.
So the minimum airgap flux density BFmin g is
Using FEM, the more precise values of B0g and BFmin g may be found, and kFringe in (9.3) may be determined as a function of dc excitation mmf WF · IF for given machine geometry and airgap.
The airgap flux density fundamental BFg1 is
In general, τp ≈ τ, as discussed before, for MAGLEVs; again, if only propulsion is needed, to minimize normal force, τp/τ ≈ 0.67 ÷ 0.7.
The emf per both ac winding legs is
where
E1 is the phase RMS value of emf
W1 is the turns per phase/primary leg
ϕp1 is the ac flux/pole (peak value)
In (9.5), the two sides are connected in series (as for eight-shape-coil system); they may be connected in parallel also, to balance the normal force against track irregularities above the two U core legs alternatively; the two ac windings may be controlled by two 50% rating PWM inverters for more redundancy.
9.3 Armature Reaction and Magnetization Synchronous Inductances Ldm and Lqm
The three-phase ac winding produces, in turn, an armature reaction magnetic field in the airgap. Let us consider the ac traveling mmf J1(x, t) as
where
and δi is the current power angle.
When in axis d, the armature reaction field “sees” the small airgap g1 for the pole span and the large airgap g2 in the interpole airgap zone; with transverse laminations, the magnetic field paths flow in the transverse plane and g2 ≈ τ/π. Pure q axis current control is adequate for integrated suspension and propulsion control for decoupling the two functions; this situation is shown in Figure 9.6.
Based on the magnetic energy in the airgap Wmd concept,
with α = π · τp/τ, k = g2/g1:
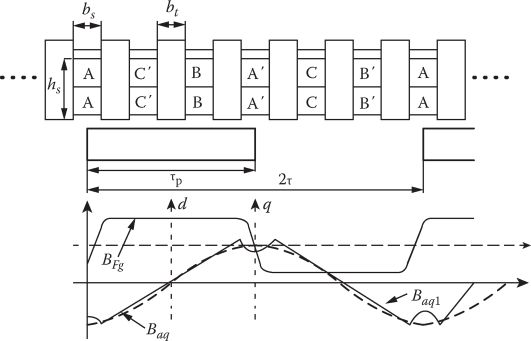
FIGURE 9.6 q axis reaction flux density.
where Xm is the magnetization inductance of the ac winding for smooth airgap (2g1 · kC) and including both U-shape leg ac coils in series (2W1):
Again
2p is the poles of ac winding
kC is the Carter coefficient
L = 2a is the width of one U core leg
The ac winding leakage reactance Lls includes mainly the slot leakage and the end-connection leakage components. For “open slots” at both ends, the double-slot width (2bS) is considered in the slot leakage inductance:
q1 is the slots per pole per phase.
To complete the main parameter expressions, we add the ac winding resistance:
For the eight-shape coil in (9.14), 2W1 becomes W1, and lc becomes 2lc, where jco is the rated (design) current density. The no-load steady-state voltage equation/phase is thus, as in a rotary synchronous machine,
From (9.5), (9.1), and (9.3) and (9.4), the field armature coupling reactance Xma is
Let us consider the general case of τp/τ ≠ 1 (Xdm ≠ Xqm or Xd ≠ Xq) and Id ≠ 0 in the phasor diagram of Figure 9.7.
The electromagnetic power Pelm is, as in any SM,
Similarly the reactive power
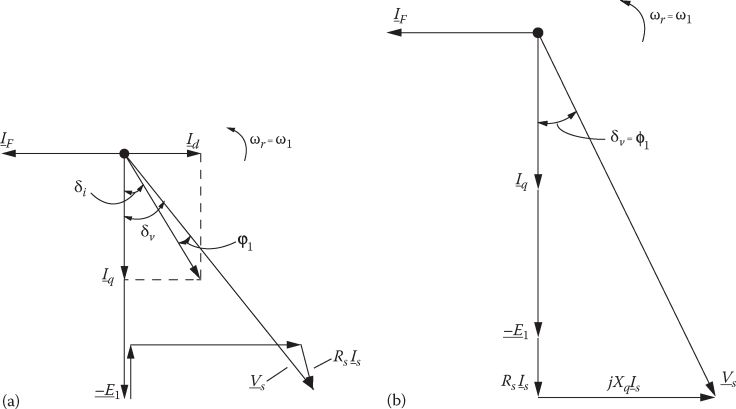
FIGURE 9.7 Phasor diagram of H-LSM with Id ≠ 0, (a) and Id = 0, (b).
So
Note: Id, Iq are phase variables (RMS values of them).
The total magnetic energy in the machine Wmt when neglecting magnetic saturation is
and the normal (attraction) force Fn is
Thus, from the phasor diagram, Id and Iq are
Finally, the power factor cos φ and efficiency η are
Example 9.1
For the so far developed preliminary theory, let us consider the following data: Us = 90 m/s, 2p = 12 poles, τ = 0.45 m, L = 2a = 0.25 m, g1 = 0.02 m (!), W1 = 305 turns per phase, kW1 = 1 (winding factor, say, q1 = 1, y/τ = 1), WFIF = 30,000 A turns, VS = 3 kV(RMS value); τp/τ ≈ 1. It is required to calculate Fx′ Fy′ (Fn), η, cos φ versus power angle δ (δV).
Solution
Applying Equations 9.1 through 9.24, we get the results in Figure 9.8:
The results in Figure 9.8 warrant remarks such as the following:
For Id = 0, which corresponds to δv ≈ 45°, sizeable rated thrust, normal force, and good power factor (cos φ > 0.8) and efficiency (η > 0.95) are obtained.
The dc winding copper (or aluminum) losses are not considered here but, even if they would, the losses would be up to 10% of rated power; the total efficiency would be then above 85%; but it will provide for both suspension and propulsion in MAGLEV applications.
The normal force to thrust ratio for δv = 45° is more than 12/1, which means that more thrust is available, if the maximum vehicle acceleration is limited to 1 m/s2 with the H-LSM making 10% of vehicle total weight. When fully loaded with people or freight, the normal force to thrust will be around 10/1.
The earlier example is rather general, and no attempt at optimal design was made; the pole pitch τ = 0.45 m is rather high; 0.2 ÷ 0.25 m would be more adequate, as the U-shape core legs width L = 2a ≈ 0.2 ÷ 0.25 m, to reduce the track segments weight (and cost).
The maximum dc produced airgap flux density B0g could go as high as 1.6 T, for high saturation flux density, and, with an airgap g1 = 10 mm, outstanding performance is to be expected, for integrated propulsion and suspension functions on MAGLEVs.
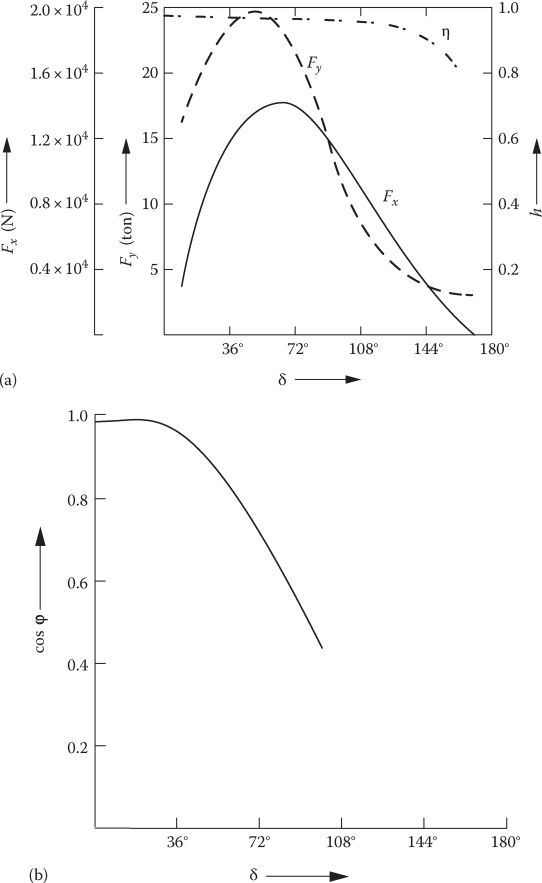
FIGURE 9.8 H-LSM steady-state characteristics: (a) thrust Fx, normal force Fy (Fn) and efficiency, (b) power factor. (After Boldea, I. and Nasar, S.A., Linear Motion Electric Machine, John Wiley & Sons, New York, 1976.)
9.4 Longitudinal end Effect in H-LSM
The dc field winding and the primary core have a limited length along the direction of motion; the latter moves at speed Us with respect to the solid-iron secondary (track) segments (Figure 9.9).
These induced eddy currents in a secondary segment at its entry into the primary will decay in time, while the segment “travels” along the primary length; a similar effect occurs at a secondary segment exit from primary.
The eddy currents thus created manifest themselves in a drag force Fd, a reduction of normal force, and by additional losses (lower efficiency). These eddy current influences on performance are called the longitudinal end effect. As in Ref. [8], through a rather complete theory, it was demonstrated that the longitudinal end effect even at 100 m/s has a thrust and normal force reduction effect of less than 10%–15% (with similar effects on losses). We may treat here the longitudinal end effect by a simplified model, easier to use in optimization design. This is in sharp contrast to LIMs, where dynamic longitudinal effects at high speeds are much higher.
The main assumptions are the following:
The current induced in the secondary segments exhibits only a transverse (Jy) component (Figure 9.9); the inevitable presence of longitudinal component (Jx) is accounted for by the Russel-Northworthy coefficient (see the chapters on LIMs) kt:
with
where Lw is the window area width between the primary U core legs; the approximation for c takes into account the single secondary segment with two primary U core leg interaction in defining the eddy current density lines:
The magnetic field is zero outside the primary core.
The induced current distribution along Ox (direction of motion) is uniform inside and outside the core.
The secondary segment magnetic permeability is constant but it is iteratively calculated.
The depth of field penetration in the secondary segment is also iteratively calculated [9].
The reaction field of induced currents is neglected.
The eddy currents in the entry and exit secondary segments die out quickly and thus only their influence on longitudinal end effect is considered here (see Ref. [8] for a more detailed analysis).
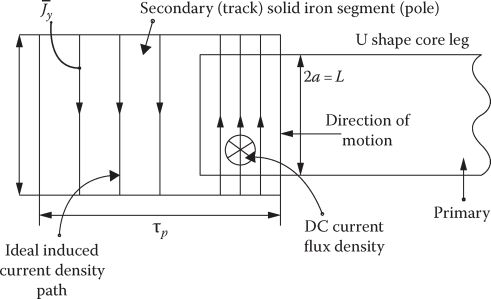
FIGURE 9.9 Ideal secondary induced currents at H-LSM primary entry.
Consequently, with ψF as dc field current flux in the entry segment, speed U, and segment resistance R, we have
Approximately
with B0g from (9.1).
The effect of armature traveling field on longitudinal end effect is neglected here. From the previous equations, the current I in the secondary segment is (Figure 9.9)
where σi is the iron electrical conductivity.
The drag force, for both U core legs and entry segment Fd, is
The maximum drag force Fdmax occurs at x = τp/2. The average drag force (considering both entry and exit segments, with 2p poles per primary) is Fd ≈ Fd max:
Note: As the reaction of the eddy currents I has been neglected, their influence on normal force is also neglected. Ref. [8] includes the reduction of normal force due to longitudinal end effect.
Experimental results (Ref. [8]) confirm the theory, for a 30 m/s max speed test platform (Figure 9.10) in relation to normal force reduction and drag force increase with speed (2pτ = 0.62 m, 2a = 0.03 m, τp = 0.069 m = τ, g1kC = 6.7 mm).

FIGURE 9.10 Average drag (Fx) and total average normal force Fn versus speed for an H-LSM (longitudinal end effect). (After Boldea, I. and Nasar, S.A., EME J. (now EPCS), Taylor & Francis, 2(2), 254, 1978.)
It is estimated that for a 1 MW H-LSM with a total stack width (2 × 2a = 0.15 m), 2.5 m long at 100 m/s, the drag force power (Fxav U)-longitudinal effect losses are less than 65 kW. This is quite acceptable and proves the suitability of the H-LSM for high-speed MAGLEVs with solid mild steel track segments. The normal force decrease with speed due to longitudinal end effect at 100 m/s is less than 15%, to prove once more this claim.
9.5 Preliminary Design Methodology by Example
The design methodology starts with preliminary specifications such as
Rated (or peak) thrust: Fxu = 6 kN (8 H-LSMs for a 36 ton MAGLEV)
Rated normal force Fn = 4.5 ton
Rated (peak) speed Un = 100 m/s
Rated ac phase voltage (maximum RMS value): VS = 1080 V
Pure Iq control
Rated (and boost) dc voltage for field winding supply: not given here.
Besides this data, quite a few parameters are given from prior experience, such as the following:
Airgap g1 = 1.5 × 10−2 m (from mechanical reasons, it could be lowered to g1 = 1.0 × 10−2 m).
Secondary track segments total width Ls < 0.35 m (Ls = 2 × 2a + LW); this limitation should keep the track cost within reasonable bounds.
Maximum H-LSM length: 2pτ < 3.7 m (to accept tight curves).
With this data in mind, we return to a few important items that provide the mathematics for the preliminary design. Then we use the case study data to produce sample design results.
9.5.1 Armature AC Winding Specifics and Phasor Diagram
The two practical ac windings of interest have been already introduced in Section 9.1. The eight-shape-coil ac winding (Figure 9.11) seems the first choice, especially with three slots/pole (q = 1 slot/pole/phase) and diametrical coils (y/τ = 1) to yield unity fundamental winding factor .
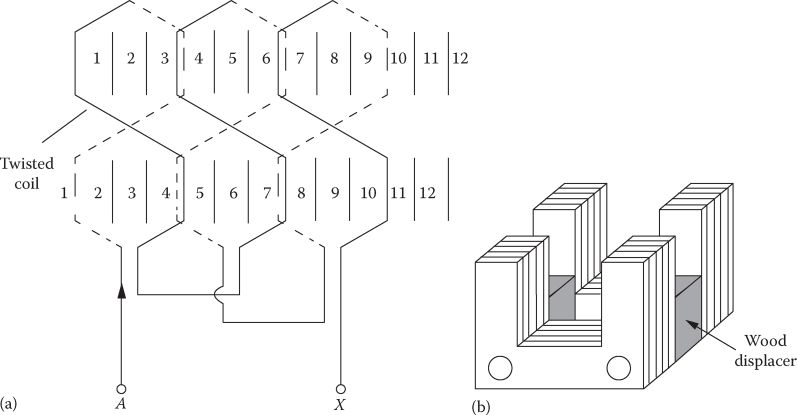
FIGURE 9.11 Eight-shape ac coil winding for H-LSM (a), transverse (U shape) primary cores, (b). (After Boldea, I. and Nasar, S.A., EME J. (now EPCS), Taylor & Francis, 4(2–3), 125, 1979.)
The three-layer winding (Figure 9.4) has its own merits in reducing the end connections of coils (mainly for 2a ≤ τ) and in providing space for airflow between layers, but its fundamental winding factor is only 0.867.
For transverse (transformer) lamination primary cores, the armature reaction field is also transverse (ac coil slots are open at both ends), and thus, the interaction between propulsion and suspension functions for pure Iq control (Figure 9.11) is notably reduced.
The phasor diagram in Figure 9.7b stands for MAGLEVs, Ld = Lq = Ls (τp/τ ≈ 1), to provide enough normal force.
Note: When small normal force design is required, either the ratio τp/τ is reduced to 0.65–0.7 or a double-sided structure is used. At the limit when short travel of primary on linear bearings is adopted, the dc coils may be replaced by primary long PMs [14] (Figure 9.12).
Again, to reduce the radial force on each U core, τp/τ = 0.65–0.70, after optimization attempts.
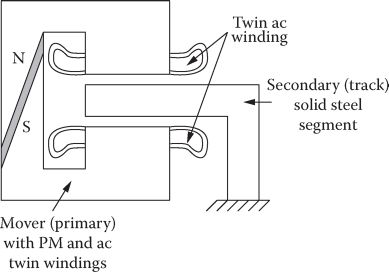
FIGURE 9.12 Ideally zero normal force H-LSM with concentrated flux PM homopolar excitation. (From Evers, W. et al., Record of LDIA-1998, Tokyo, Japan, pp. 46–49, 1998.)

FIGURE 9.13 Transverse leakage flux lines of dc excitation coils.
9.5.2 Primary Core Teeth Saturation Limit
With pure Iq control (typical with PWM voltage-source inverters), in MAGLEVs (Figure 9.6), the teeth on the second half of the pole pitch experience both the dc excitation and full ac magnetic flux density B0g (9.1).
The armature reaction airgap flux density translates into a larger teeth flux density. So its influence should be enlarged by the slot pitch/tooth length ratio: on top of that, the leakage flux density in the U core window has to be added as it is notable (Figure 9.13).
We may not add flux densities unless magnetic saturation is ignored (or kept constant (known)). So the total maximum primary tooth flux density Btmax is approximately
where
τs is the tooth pitch
bt is the tooth span
Equation 9.33 unveils an iterative process, as heavy magnetic saturation with Btmax = 1.85 ÷ 1.9 T (even 2.2 T for special, high-saturation flux density, silicon lamination) is practical. Btmax is a design parameter as it limits how low LW could go, together with the constraint of enough room for ac end coils.
9.5.3 Preliminary Design Expressions
With LS limited to 0.3−0.35 m, we may infer that
Also 2p • τ < 3.7 m; c1 ≥ 1. To quickly calculate the pole pitch τ, the thrust and normal force expressions are recalculated here:
where Fd is the longitudinal effect (braking) force (9.31).
With a large airgap (g1 = 1.5 × 10−2 m), the airgap flux density of dc coils B0g ≈ 0.85 T (much larger values (1.5−1.6 T) could be adopted for superior laminations with Bsat = 2.35 T!), to limit the U core window weight. The U core leg width (2a) can now be calculated, by fixing 2pτ (primary length), from (9.35), with given normal force Fn.
Then, from (9.34), the pole pitch τ is obtained. The number of Ampere turns per winding (2W1I1) follows then from (9.35) for given thrust Fxa. From here on the slot height hS, calculation for given τ and q1 = 1 is straightforward.
And so all parameters and performance based on technical theory developed in previous paragraphs may be calculated.
Typical results for our numerical example are as follows:
jF = 15 A/mm2—rated current density in the field coils (forced cooling)
jCo = 20 A/mm2—rated current density in ac windings (forced cooling)
τ = 0.18 m—pole pitch
2p = 20—number of poles
LW = 0.158 m—window width
2a = 7.08 × 10−2 m—U core one leg width
fn = 274 Hz—rated frequency
In ≈ 250 A
W1 ≈ 114 turns/phase
VS ≈ 1080 V
cos φ1 = 0.8368
WFIF ≈ 22,332 A turns—field coils mmf
Fd ≈ 280 N (longitudinal effect drag force at di = 0.6 × 10−3 m)
η1 ≈ 0.95—efficiency without dc winding losses
ηnet = 0.836—total efficiency (with dc winding losses)
Fxn = 6 kN—total thrust
Fn = 4.5 ton—normal force
TF = 0.04 s—dc field circuit time constant
pexc = 65 kW—dc field coil losses
hs = 0.09 m—ac coil slot height
The preliminary design may be discussed as follows:
As the dc current produced airgap flux density B0g is only B0g = 0.85 T, the ratio of 7.5/1 of normal force/thrust is obtained at an airgap g1 = 1.5 × 10−2 m. A smaller airgap (g1 = 1 × 10−2 m) with B0g = 1.3−1.5 T (for high saturation flux density laminations) would allow notably better performance; still the preliminary design yields acceptable performance for integrated propulsion suspension of a MAGLEV at 100 m/s, such as 0.886 kg/kW for the H-LSM at ηnet = 0.836 and cos φ=0.8368.
The previous preliminary design should be used only as a starting point; FEM analysis is to be performed to calculate Bgmin and thus more precisely Bg1 (fundamental airgap flux density in the airgap produced only by the dc winding); Bg1 is crucial for thrust force computation Fxn.
A more detailed analytical model with 2 (3) D FEM correction factors may be used for an optimization design methodology; finally, again, key 2 (3) D FEM should be used to validate the optimal analytical design.
An example of an H- LSM as applied to an urban MAGLEV 4 ton research prototype (Magnibus-01) will be presented in more detail in a later chapter on “Passive Guideway MAGLEVs” [16].
The application of H-LSM with PM excitation [14] for short travel (a few meters) on linear bearings or on wheels, though interesting in nature, is not pursued here.
The H- LSM with 1.3–1.5 T dc airgap flux density leads to overall propulsion and suspension performance, which makes the latter very performance/cost competitive for MAGLEVs, where its large normal force is fully exploited.
9.6 H-LSM Model for Transients and Control
H-LSM behaves like a rotary synchronous machine with dc excitation, Ld = Lq = Ls (only in MAGLEVs), and with a very weak damper cage represented by the solid-iron secondary segments. For simplicity, we neglect this cage effect.
It should also be noticed that there are basically two sets of equations of motion: vertical (suspension) and longitudinal (propulsion) motion. The drag force, Fd = kd · U, acts as a damper for the propulsion motion longitudinal oscillations.
We may now simply write the dq model of H-LSM in stator coordinates:
No track irregularities are yet considered previously. We should add the Park transformation:
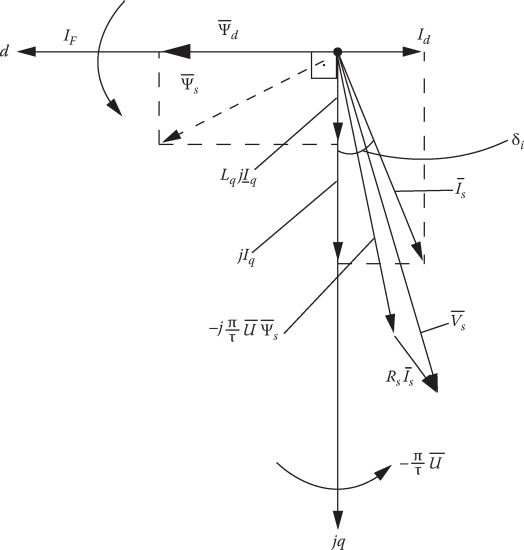
FIGURE 9.14 The vector (space phasor) diagram of H-LSM (steady state, Id ≠ 0).
The sign (−) for θer in (9.39) stems from the fact that the primary is moving against its traveling field (Figure 9.14):
As expected, Figures 9.7 and 9.14 are very similar in terms of angles, but it is time angles in Figure 9.7 and space angles in Figure 9.14 as the latter deals with space vectors and not with phase variables.
The same Park transformation is valid for the voltage vectors. Once the voltages Va, b, c(t), Fload, kd′, VF(t), and H-LSM parameters are given, numerical methods allow investigating any transients by (9.36) through (9.38).
For given airgap, the vertical equations of motion are eliminated and the order of the system degenerates from 7th (Id, Iq, IF, U, θer, Uv, to 5th (Id, Iq, IF, U, θer). The propulsion and the suspension close-loop control add more equations (and orders) to this system of equations.
A generic structural diagram for Equation 9.37 for constant airgap, pure propulsion control, is given in Figure 9.15.
Note: In Figure 9.15, the VF and IF are actual field winding input voltage and current.
As noticed in Figure 9.15, there are only two leakage electric time constants to consider, in the absence of the secondary damping cage (see Ref. [13] for an SM with damper cage).
Magnetic saturation occurs in ψdm and ψqm. The airgap variation also marks its presence in ψdm
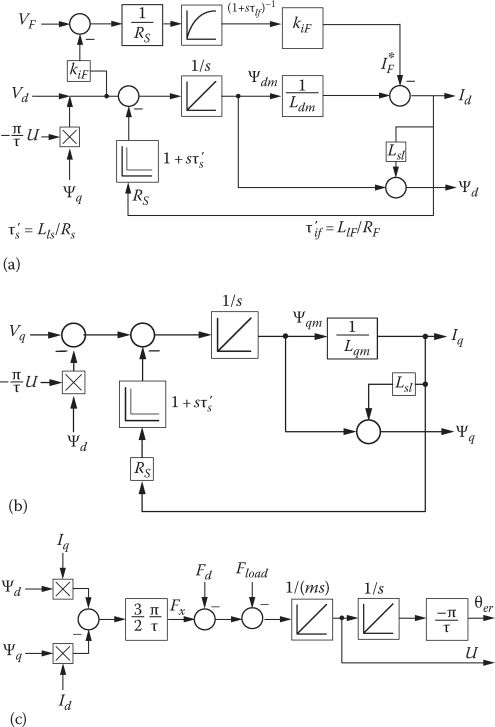
FIGURE 9.15 Generic structural diagrams of H-LSM: (a) axis d, (b) axis q, and (c) motion equations (constant airgap, g1).
9.7 Vector Thrust (Propulsion) and Flux (Suspension) Control
Based on the circuit model, a recently developed generic vector control system of H-LSM is shown in Figure 9.16.
The rather complex control in Figure 9.16 may be somewhat clarified by remarks such as the following:
zero vector control is chosen to reduce propulsion-suspension interaction (in practice, it is not zero but it is small).
PI + SM (sliding mode) control for airgap, speed, and current controllers is chosen to provide robust control in the presence of airgap and magnetic saturation (inductance) variations.
In the presence of a secondary mechanical suspension system for each H-LSM on a MAGLEV, rather independent but highly robust, partly decentralized, airgap control is feasible.
For propulsion-only control, the reference field current may be made dependent either on reference thrust (to minimize total copper losses, for example) or it is kept constant up to base speed and then decreased with speed for constant power wide-speed range.
Either mover position (with respect to secondary (track) segments) or mover speed may be measured or estimated, for motion sensorless control; for nonhesitant start, initial mover position has to be known (or estimated).
The emf compensation network improves performance at high speeds by relaxing somewhat the contribution of PI + SM Id, Iq current controllers.
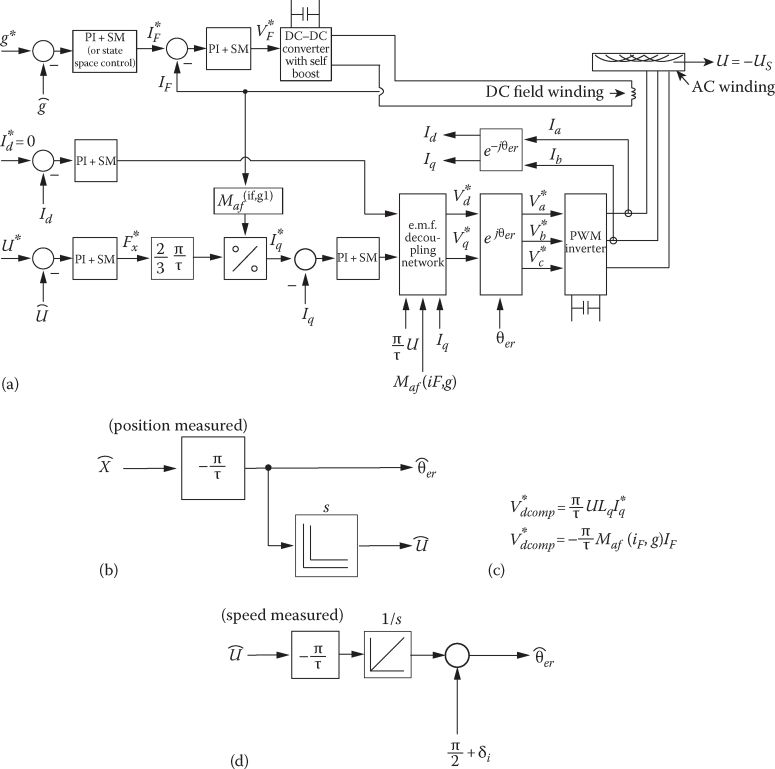
FIGURE 9.16 Vector control of H-LSM (integrated propulsion and suspension control): (a) vector control, (b) position angle and speed from measured position, (c) emf decoupling network, and (d) position angle θer from measured speed.
Typical vector control results for a four H-LSM (in parallel) MAGLEV (MAGNIBUS-01) are given in Ref. [16].
While, in the 1980s, current source inverters were used for the H- LSM control [6,17], today PWM voltage-source inverters, one for each H-LSM control, provide higher efficiency and lower converter weight in integrated vector MAGLEV propulsion and suspension control.
9.8 Summary
Homopolar linear synchronous motors (H-LSM) are characterized by a solid mild steel track with magnetic anisotropy and a transverse multiple U-shape primary silicon lamination mover (primary) provided with a primary long dc coil for excitation and a three-phase ac winding.
The primary long dc coil currents produce a homopolar, pulsating, airgap flux density with 2p poles; the fundamental of this flux density is aligned to the secondary segments axis (axis d) and interacts with the ac winding mmf to produce thrust (Fx).
The resultant airgap flux density produces a normal (attraction) force, which may be used for controlled magnetic levitation (suspension) of the vehicle (Fn).
Ratios of Fn/Fx ≥ 10/1 may be obtained with rather undecoupled control of suspension and propulsion, if pure Iq control for propulsion is accompanied by field current control for levitation.
When levitation control is not needed, double -sided primaries may be used “to sandwich” the segmented (variable anisotropy) secondary (track), for ideally zero vertical force between primary and secondary; to reduce the vertical force between the two sides of the primary, the secondary segment span is reduced to τp/τ = 0.6 ÷ 0.7.
For dc field current flux density of 1.3 ÷ 1.5 T, rather good integrated propulsion-suspension performance can be obtained in terms of efficiency, power factor, and in terms of thrust and normal force per weight.
It has been shown that the eddy currents induced in the solid iron segments due to their motion for limited primary length, that is the longitudinal end effect, have mild (10%) influences on thrust, normal force, and on efficiency, even at 100 m/s speed.
Preliminary design examples indicate total efficiency above 85% (for integrated propulsion and suspension) and power factor above 80% for up to 100 m/s MAGLEVs, but 2 (3) D FEM should be used to calculate more precisely the performance.
The dq model of H-LSM contains inductances Ldm, Lqm, which depend on airgap; in general, the airgap varies due to track irregularities or during levitation control. This makes the dq model of H-LSM highly nonlinear, besides the influence of the product of variables and magnetic saturation.
Very robust vector control [18] of H-LSM for decoupled propulsion and levitation control is required to account for these nonlinearities.
Passive guideway H-LSM MAGLEVs, for urban and interurban transportation, should be investigated aggressively now that high-performance PWM inverters and mechanical electric power collection (through controlled pantographs) in the MW power range are available up to 120 m/s and more.
References
1. E. Rummich, Linear synchronous machines—Theory and construction, Bull. ASE, 23, 1972, 1338–1344 (in French).
2. M. Guarino, Jr., Integrated linear electric motor propulsion system for high speed transportation, Record of International Symposium on Linear Electric Motors, Lyon, France, 1974.
3. E. Levi, Preliminary design studies of iron core synchronous operating linear motor, Polytechnical & Institute of Brooklyn, Report no. 76/005, 1976, DOT ORD, Washington, DC.
4. I. Boldea and S.A. Nasar, Linear Motion Electric Machine, Chapter 9, John Wiley & Sons, New York, 1976.
5. H. Lorenzen and W. Wild, The Synchronous linear motor, Intern Report, Technical University of Munich, 1976 (in German).
6. B.T. Ooi, Homopolar linear synchronous motor, Record of ICEM-1979, Brussels, Belgium.
7. T.R. Haden and W.R. Mischler, A comparison of linear induction and synchronous homopolar motors, IEEE Trans., MAG-14(5), 1978, 924–926.
8. I. Boldea and S.A. Nasar, Field winding drag and normal forces in linear synchronous homopolar motors, EME J. (now EPCS), Taylor & Francis, 2(2), 1978, 254–268.
9. I. Boldea and S.A. Nasar, Linear synchronous homopolar motor—Design procedure for propulsion and levitation, EME J. (now EPCS), Taylor & Francis, 4(2–3), 1979, 125–136.
10. I. Boldea and S.A. Nasar, Thrust and normal force pulsations of current inverter—Fed linear induction motors, EME J. (IBID), 7(2), 1982.
11. G.R. Slemon, A homopolar linear synchronous motor, Record of ICEM-1979, Brussels, Belgium.
12. I. Boldea and S.A. Nasar, Linear Motion Electromagnetic Systems, Chapter 7, John Wiley & Sons, New York, 1985.
13. I. Boldea and L. Tutelea, Electric Machines: Steady State, Transients and Design with Matlab, Chapter 9, CRC Press, Taylor & Francis, New York, 2009.
14. W. Evers, G. Henneberger, H. Wunderlich, and A. Seelig, Record of LDIA-1998, Tokyo, Japan, 46–49.
15. S.-M. Jang and S.-B. Jeong, Design and analysis of the linear homopolar synchronous motor for integrated magnetic propulsion and suspension, Record of LDIA-1998, Tokyo, Japan, 74–77.
16. I. Boldea, I. Trica, G. Papusoiu, and S.A. Nasar, Field tests on a Maglev with passive guideway linear induction motor transportation system, IEEE Trans., VT-37(5), 1988, 213–219.
17. T.A. Nondahl, Design studies for single-sided linear electric motors: Homopolar synchronous and induction, EME Journal (now EPCS), Taylor & Francis, ISSN: 0361 -6967, Hemisphere Publish Company, 5(1), 1980, 1–14.
18. C.-T. Liu and J.-L. Kuo, Improvements on transients of transverse flux homopolar linear machines using artificial knowledge based strategy, IEEE Trans., EC-10(2), 1995, 275–286.