
11 Linear Switched Reluctance Motors (L-SRM)
Modeling, Design, and Control
Linear switched reluctance motors (L-SRMs) are counterparts of rotary switched reluctance motors [1–3]. The finite length of their magnetic circuit along the direction of motion introduces, for a small number of poles, some longitudinal static effects (asymmetries between phases). Also, the normal force has its peculiarities with L-RSM, but other than that, the theory developed for rotary SRMs may be adapted easily for linear SRMs.
So, as for rotary SRMs, L-SRM produces a thrust and motion by the tendency of a ferromagnetic secondary to hold a position where inductance of the active (excited) primary phase is maximum. Though it is in general a multiphase machine, L-SRM operates with 1(2) phases as active at any time. The turning on and off of each phase is triggered by a linear position sensor or by an observer so as to fully exploit the thrust capability of that phase. So the turning on and off of each phase is “in tact” (synchronous) with rotor position; however, each phase is fully energized and deenergized for each thrust cycle, and thus L-SRMs are not traveling field synchronous machines (like L-RSMs in the previous chapter). This brings L-SRM closer to linear stepper motors, but with position control of each phase current. Finally, the mutual inductances between phases in L-SRMs are small, which is good for fault tolerance but it is the reason why all the energization and deenergization cycling process takes place through the special PWM inverter (multiphase dc–dc converter) that supplies it.
The rather low thrust density of L-SRM (unless very heavily saturated) in comparison with linear PM synchronous motors) is another secondary effect of its simplicity and low cost. The L-SRM’s ruggedness and rather low losses recommend it for linear motion application in various industries.
11.1 Practical Topologies
L-SRMs have a longitudinal or transverse lamination uniformly slotted primary core with tooth-wound (concentrated) 1, 2, 3, 4, or more phase coils and a variable reluctance longitudinal or a transverse-lamination secondary core. The pole pitches τs, τp of the slottings of the primary and secondary are in general
τp=τs (Ns=Nr) one-phase cores for single-phase L-SRMs with “stepped” airgap for self-starting (Figure 11.1)
τp/τs=4/6 or 8/6 (Ns=6, Nr=4, 8 or multiples of these values) for three phases (Figure 11.2)
τp/τs=6/8 (Ns = 8, Nr=6, 10 etc.) for four phases (Figure 11.3)
The principle is that each secondary pole is attracted to the active phase poles when the latter is supplied with a PWM voltage to produce a mover-position-triggered phase unipolar current in that phase.
While single-sided, flat, three-phase configurations with longitudinal and transverse flux are shown in Figure 11.2, a double-sided flat four-phase configuration is shown in Figures 11.3. In Figures 11.1 through 11.3, the mover is active (primary), and thus it must be supplied by a flexible ac power cable in short travel applications or by a mechanical (or inductive) power transfer on board in transportation (or special clean room) applications.

FIGURE 11.1 Single-phase, saturated, half-secondary pole, flat, single-sided L-RSM and its thrust versus position for constant current fixed secondary.
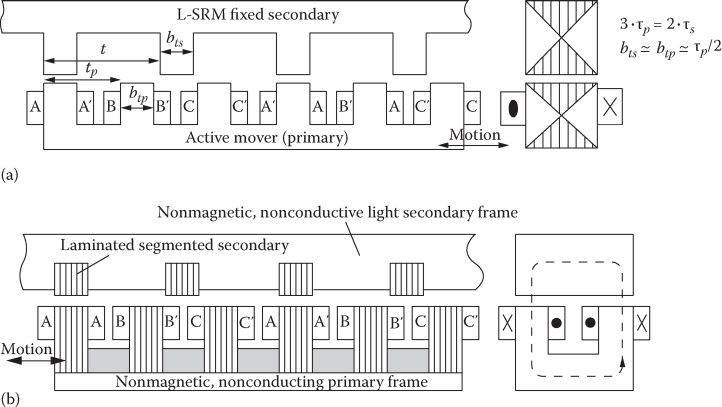
FIGURE 11.2 Three-phase, flat, single-sided L-SRM: (a) longitudinal and (b) transverse.

FIGURE 11.3 Four-phase, double-sided, flat L-RSM with active mover (primary) and longitudinal flux.
Tubular configurations may also be adopted for short travel taking advantage of the “blessing” of circularity (Figure 11.4). The tubular L-SRM cores may be made of soft magnetic composites (tooth by tooth in the primary) or from two types of disk-shaped laminations with radial slits, to reduce eddy current losses in the back cores (in not so high fundamental frequency (below 100 Hz) applications).
The ratio between normal force and thrust in L-RSM is rather large (Fn/Fx > 10), and thus, unless Fn is required for levitation, it is just a source of noise, vibration, and, consequently of stress in the iron cores and in the frame. Double-sided flat and tubular topologies implicitly provide zero-ideal normal force on the interior part of L-SRM [2-5].
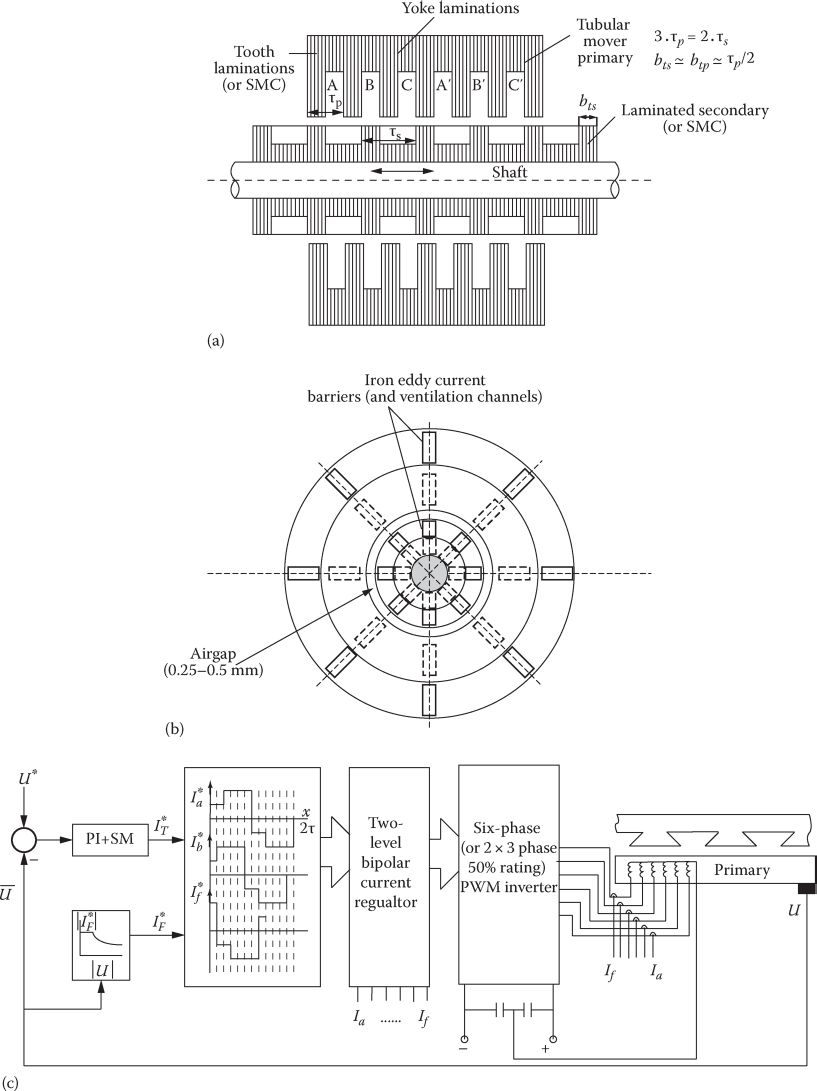
FIGURE 11.4 Three-phase tubular L-RSM with disk-shaped laminations, (a) radial slits (as barriers for eddy currents) (b), and generic control system (c).
The transverse-flux TF-L-SRM is characterized by shorter flux lines and possibly lower core losses, while the iron core usage is poorer, especially in three-phase L-RSMs, where only one phase is active at any time. While typical L-SRMs use tooth-wound coils to reduce copper losses drastically, segmented or multiple flux-barrier secondaries may also be used with multiphase diametrical windings and bipolar two-level current control, for example (Figure 11.5).
This machine has a single magnetic saliency (in the secondary), but it is controlled by bipolar two-level current pulses triggered “in tact” with the mover position. In general, the two phases with the coils around axis q (of lower inductance) play the role of “excitation” coils, and the ones below the secondary poles play the role of thrust coils. This machine, in fact (here in its linear configuration), rather directly mimics the dc brush machine with separate excitation but in its brushless version. Therefore, this would be a “true” brushless dc linear machine without PMs. One phase commutates all the time but the rest are active, and thus a rather high thrust density is provided, with reasonable peak kVA rating in the multiphase inverter.
The field current control level I*p

FIGURE 11.5 Six-phase, bipolar, two-level current L-SRM (a), its phase current waveform (b) An ALA secondary generic control system (c)

11.2 Principle of Operation
Let us consider an elementary single-phase L-SRM (Figure 11.6).
To assess the thrust correctly, the energy conservation principle has to be applied:
dWe=dWmec+dWm; dWmec=Fxdxelectric mechanical storedinput output magneticenergy energy energy(11.1)
As demonstrated in Chapter 1 the thrust is
Fx=−(∂Wm∂x)ψ=const.; Wm=ψ∫0i⋅dψ(11.2)

FIGURE 11.6 Elementary single-phase L-SRM.
or
Fx=(∂W'm∂x)i=const.; W'm=i∫0ψ⋅di; Wm+W'm=i⋅ψ(11.3)
Only for a nonsaturated core (ψ(i) are straight lines)
L=L(x)(11.4)
Wm=W'm=L(x)⋅i22(11.5)
And thus the thrust Fx and the normal attraction force Fn are
Fxi=i22∂L∂x; Fni=i22∂L∂g(11.6)
For a simplified case, when all fringing flux lines (at the airgap) are neglected and the iron cores permeability is infinite, the inductance L in Figure 11.6 may be written as
L=Lleakage+μ0W21a⋅x2g; 0≤x≤bp=bs(11.7)
L=Lleakage+μ0W21a⋅(2bp−x)2g; bp≤x≤2bp(11.8)
In this case,
Fxi≈μ0W21i22⋅a2g=constant > 0 for 0≤x≤bp=bsFni≈−μ0W21i22⋅a⋅x2g2<0(11.9)
and
Fx=−μ0W21i22.a2g=constant < 0 for bp≤x≤2bpFn=μ0W21i2a(2bp−x)g2<0(11.10)
As in general g<bp/4 (to reduce fringing flux) Fy ≫ Fx. The thrust switches from positive to negative values for positive to negative inductance slopes variation with position. The current polarity is irrelevant for thrust and normal force and thus, in general, the L-SRM is supplied from a multiphase dc–dc converter.
Example 11.1
Let us consider an elementary single-phase L-SRM with the data: airgap g = 0.3 m, U-shape core leg width a = 10 mm, the primary and secondary pole length bp = bs = 10 mm. Calculate
Thrust and maximum normal force for µiron = ∞, Ni=500 A turns
The normal airgap flux density Bg1
Copper losses for jCo = 3 A/mm2 and coil equal width and height (wc = hc)
Solution
1. We may use directly Equation 11.9 for x=bp:
Fx=1.1256×10−6×50022×10−22×0.3×10−3=2.616 N(11.11)
Fnmax=−1.1256×10−6×5002×10−2×10−24×0.32×10−6=−87.22 N(11.12)
With a total active area of primary A = 2a • bp = 2 cm2, it means a specific thrust fx = 1.308 N/cm2 and a specific maximum normal thrust fnmax = -43.61 N/cm2.
2. The normal airgap flux density Bn is
Bn=μ0WI2g=1.256×10−6×5002×0.3×10−3=1.0466 T(11.13)
3. There are two semicoils. The cross section of each of them, ACo, is
ACo=(WI2)jCokfill=50023×0.50166.66 mm2(11.14)
But ACo=hc⋅wc=h2c=166.66 m m2
The turn average length lc is
Ic≈2a+2bp+4Wc=2×10−2+2×10−2+4×1.291×10−2=9.164×10−2m(11.15)
So the copper losses are
pCo=2δCoIcWjcoi2i=2δCoIcWjCoi=2.21×10−8×9.164×10−2×250×3×106=2.886 W(11.16)
Note: Though the numerical example is elementary, the force densities fx, fn, and the thrust/losses (N/W) are typical for well-designed practical L-SRMs.
11.3 Instantaneous Thrust
The thrust in (11.9) and (11.10) is constant with mover position but, in reality, due to magnetic saturation variation and due to airgap fringing flux, it is far away from constancy and varies notably with position x and current as seen in what follows. To yield instantaneous thrust, the flux linkage/current/position curves have to be calculated, either analytically (with a multiple magnetic circuit model) or by 2(3) D-FEM; alternatively, it may be measured at standstill from current-decay tests with the primary to secondary position fixed in numerous different situations.

FIGURE 11.7 Standstill test setup to yield flux/current/position curve family decay in aligned and unaligned position: (a) electrical circuit, current decay for aligned, (b) unaligned, and (c) positions.
The dc-dc converter typical for the test is shown in Figure 11.7.
By PWM a certain initial dc current i0 is installed, and then the switch S is turned off and the current and freewheeling diode voltage decay versus time are recorded. The initial flux linkage in the phase ψ0, corresponding to initial current i0, for given mover position x, is obtained by
ψ0(i0,x)=L(i0,x)⋅i0=∫i.RS⋅dt+∫Vdiode⋅dt(11.17)
The time integrals may be done numerically down to 1%–2% of initial current, to avoid notable errors. Results as in Figure 11.8 are obtained for the family of ψ(i, x) curves. In practice, this family of curves is to be curve-fitted and then used to calculate the thrust, as seen in Figure 11.8:
Fx=∂W'm∂x=(ΔW'mΔx)i=const.; Δx=xA−xB(11.18)

FIGURE 11.8 Flux linkage/current/position curves (a) and thrust (Fx) and normal force Fn per phase versus current and position (typical results) (b).
In addition, the normal force may be calculated if the test results are obtained at two close-to-each-other airgaps:
Fn=∂W'm∂g=(ΔW'm)ΔgΔg; W'm=i∫0ψ⋅di(11.19)
The thrust nonuniformity with position is due to both magnetic saturation and fringing airgap flux that vary with mover position. In real operation, the current is flat-top controlled at low speeds and is the result of one voltage pulse per cycle at high speeds (Figure 11.9).
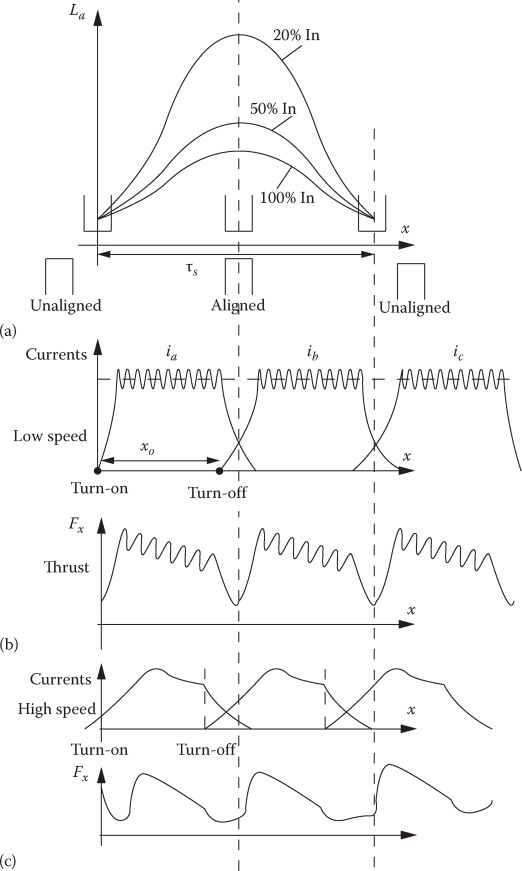
FIGURE 11.9 Three-phase L-SRM: (a) phase inductance (with saturation), (b) flat-top currents and thrust at low speeds, and (c) single voltage pulse current and thrust at high speeds. (After Boldea, I., Variable Speed Generators, CRC Press, Taylor & Francis, Boca Raton, FL, 2006.)
A few remarks are as follows:
The lack of enough voltage at high speeds leads to one pulse voltage/phase/cycle, and anticipated turn on and turn off angles (position) are adopted for higher thrust.
The thrust pulsations inevitably increase with speed and, for three-phase L-SRM, large thrust pulsations remain and thus four-phase L-SRMs with two active phases at any time are needed for low (servo drive class) thrust pulsations (10% or less).
11.4 Average Thrust and Energy Conversion Ratio
(Fx)avphase=Wmeclstroke; lstroke=τs2(11.20)
For m phases
Fxav=m.Nr⋅Wmeclstroke(11.21)
Nr is the number of secondary poles per primary length.
As some magnetic energy (Wmag in Figure 11.10) is returned to the dc link of the PWM converter, the energy conversion ratio ηec of the energy cycle is
ηec=WmecWmec+Wmag≥0.5(11.22)
The value of 0.5 is obtained for a linear flux/current variation with flux versus position for all situations; that is, in the absence of magnetic saturation (implicitly at a larger airgap). The energy conversion ratio is a correspondent of the η cos φ product in ac winding, which, in general, is larger than 0.5. So the peak kVA of the PWM inverter for the same speed and thrust is larger for L-SRM. The presence of magnetic saturation increases ηec to 0.65 ÷ 0.67 while it also decreases the commutation inductance Lt=dψt/di allowing for operation at higher speeds. However, magnetic saturation reduces average thrust and leads to larger thrust pulsations for given machine geometry.

FIGURE 11.10 Energy cycle and average thrust/phase.
11.5 CONVERTER RATING
As already stated, the PWM converter has to handle the entire energy per cycle of all phases: m · (Wmec + Wmag). To calculate the converter kVA rating, we start with the flux linkage per phase ψC:
ψC≈VdctC=VdcU(xOH−xn)(11.23)
U is the L-SRM speed.
In terms of energy,
Wmec+Wmag=Wmecηec=k⋅ψC⋅IC(11.24)
where
IC is the peak current per phase
k is the so-called converter utilization factor [1]
So the peak kVA Speak of the m phase L-SRM is (from (11.21) to (11.24))
Speak=mV0IC=FxmUk⋅ηec⋅lstrokexOH−xn=Pelmk⋅ηec.lstrokexOH−xn(11.25)
For ηec ≤ 0.65, k ≈ 0.7–0.8, lstroke/(xOH − xn) = 1.25, Speak/Pelm = 2.747. Such values are larger than for typical L-PMSMs (to be treated in a future chapter); it is the price to pay for L-SRM simplicity, fault tolerance, and smaller initial cost.
11.6 State Space Equations and Equivalent Circuit
Let us neglect the mutual flux between L-SRM phases as it is small (less than 3%–4% in general). It means that each phase may be treated separately. The voltage equation for one phase is thus
V=RSI+dψ(x,i)dt; ψ=L(x,i)⋅i(11.26)
Using the derivative of the flux linkage as product of inductance and current, we obtain first
V=RSI+Ltdidt+∂L∂t+∂L∂x⋅i.dxdt; Lt=L(x,i)+i⋅∂L(x,i)∂i(11.27)
Lt(x, i) is the so-called transient (or commutation) inductance, which, under magnetic saturation, is even lower than the saturated L(x, i). The third term in (11.27) is speed dependent and may be called the pseudo emf:
Ep=∂L∂x⋅i⋅U; U=dxdt(11.28)
Multiplying by i, Equation 11.27 may be written as
v⋅i=RSI2+ddt(12L(x,i)i2)+12i2dL(x,i)dxU(11.29)
The second term coincides with stored magnetic variation in time only when magnetic saturation is constant (∂L/∂i = 0); consequently, only in this case the last term is the mechanical power from which thrust Fx varies:
(Fx)∂L/∂i=0=12i2dL(x)dx(11.30)
When magnetic saturation is considered, Equations 11.2 and 11.3 for thrust are to be used. For the normal force, Equations 11.29 and 11.30 are to be considered. But in this case, typical when both propulsion and levitation control are performed, the voltage equations (11.27) and (11.28) may be extended as
V=RSI+dψ(x,i)dt+Ep+ES; ES=i∂L(x,i,g)∂g⋅dgdt(11.31)
And again,
Ep=i∂L(x,i,g)∂x⋅U(11.32)
Similarly, the instantaneous power/phase equation gains an additional term due to vertical (levitation) motion speed:
v⋅i=RSI2+ddt(12L(x,i)i2)+12i2∂L(x,i,g)∂xU+12i2∂L(x,i,g)∂g⋅dgdt(11.33)
Based on (11.32), though, with Ep and ES as pseudo emfs an equivalent circuit may be drawn (Figure 11.11).
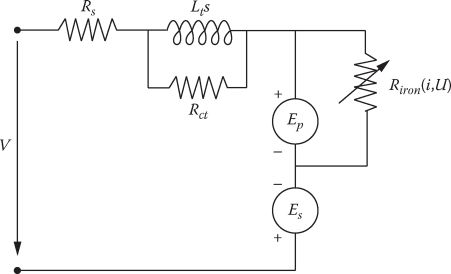
FIGURE 11.11 L-SRM single-phase circuit with propulsion (Ep) and suspension (ES) pseudo-emfs.
The core losses occur in L-SRM both in the primary and in the secondary because the machine does not have a traveling field. A rather complete study of iron losses in rotary SRMs is offered in Ref. [3]. The iron core resistance Riron in the equivalent circuit may thus be calculated or may be estimated from measurements during motion at constant current while Rct refers to core losses due to current time variations (di/dt) during current control, mainly; Rct may act even at standstill.
The multiphase equation of L-SRM may be simply written as
Va,b,c,d,..=RSIa,b,c,d,..+dψa,b,c,d,..(x,ia,b,c,d,..)dt(11.34)
Fa,b,c,d,..=∂∂xia,b,c,d,..∫0ψa,b,c,d,..(x,ia,b,c,d,..)dia,b,c,d,..(11.35)
As already mentioned, the flux linkage/current/position curve family is essential to calculating thrust Fx and normal force Fn. Its approximation is crucial for control system design, for example,
ψ(i,x)=a1(x)(1−e−a2(x)i)+a3(x)i(11.36)
with
a1,2,3(x)=∞∑k=0Ak1,2,3 cos(2πτSx)(11.37)
or
ψj=ψsat(1−e−ijfj(x)); ij≥0fj(x)=a0+3∑k=1an cos(2πτsx−(i−1)2πm); j=1,2,3,4(for m=4 phases)(11.38)
Approximations such as these are useful for rather high-fidelity curve fitting, allowing also analytical thrust and normal force expressions. However, for control design purposes two-piece linear approximations may be acceptable (Figure 11.12).
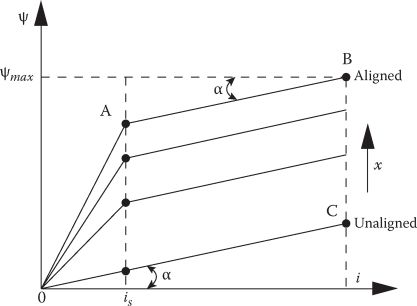
FIGURE 11.12 Simplified ψ(i)x curves.
ψj=ij(LU+kU(x−xon)isτp2)ψi=ijLU+kS(x−xon)τp2; i≥is; i≤iS(11.39)
For this simplification, it suffices to perform 3D-FEM calculations, corresponding to points A, B, and C [9].
11.7 Small Signal Model of L-SRM
Let us revisit the voltage Equation 11.26 and add the motion equation (for propulsion only):
GmdUdt=Fx−FLoad−BU; dxdt=U; Gm, mover mass(11.40)
and neglect magnetic saturation to yield
Fx=123(4)..∑j=1i2j∂Lj∂x(11.41)
Linearizing Equations 11.26 and 11.40 starts with
i=i0+Δi; U=U0+ΔU; V=V0+ΔV; Fload=FLo+ΔFLoad(11.42)
and yields
(s+1τe)Δi+kbLavΔU=ΔVLav; Re=RS+∂L∂xU0; Lav≈(Lmax+Lmin)2−kbGmΔi+(s+1τm)ΔU=−ΔFlGm; τe=LavRe; kb=∂L∂xi0; τm=GmB(11.43)
Note: The machine transient inductance is considered here as Lav (instead of Lt), while the phase inductance L varies linearly with position (x).
With ∆E=kb∆U, the structural diagram of Equation 11.42 is presented in Figure 11.13.
The structural diagram in Figure 11.13 may be characterized as follows:
The equivalent resistance Re includes the pseudo-emf influence and thus increases with speed; so the electric time constant τe decreases with speed.
The structural diagram is very similar to that of the dc series brush motor.
The equivalent time constants (τ1 and τ2) in the reduced structural diagram are dependent on i0, U0, ∂L/∂x, Lav, RS.
The response of this second-order system is thus inherently stable; the response may be aperiodic or periodic but always attenuated.
The L-SRM operates as a motor for ∂L/∂x > 0 and as generator for ∂L/∂x < 0.

FIGURE 11.13 L-SRM, per phase structural linear diagram (a) and its reduced form (b).
Example 11.2
Let us consider a three-phase L-SRM with Lmin = 2 mH, Lmax = 10 mH, and RS = 0.2 Ω, which is operated at U0 = 1 m/s and controlled at a constant current value l0 over the entire xd wel = τp/2 = 10 mm, which corresponds to equal pole and interpole primary lengths, for voltage V0 = 42 Vdc.
Calculate
Current l0, peak flux linkage Ψmax, average thrust Fxav, and load force Fload at U0 = 1 m/s.
For constant load and a 10% increase in average voltage V0 (∆V = + 0.1 V0) indicate the way for calculating the eigen values and current and speed transients using the small signal approach, with τ1 = Gm/B = 3 s, B = 5.6 Ns.
Solution
1. The conducting time/phase ton is
ton=XdU0=10×10−31=0.01s(11.44)
Using voltage equation yields (at constant speed)
V0ton=RSI0ton+(Lmax−Lmin)I0(11.45)
I0=V0tonRSton+(Lmax−Lmin)=42×0.010.2×0.01+(10−2)×10−3=42 A(11.46)
The average thrust Fxav/phase is in fact total average thrust as only one phase is active at any time:
Fxav=12i20∂L∂x=i202.(Lmax−Lmin)xdwell=4222⋅(10−2)10−310×10−3=705.6 N(11.47)
Now the load force Fload is
Fload=Fxav−BU=705.6−5.6×1=700 N(11.48)
2. The inductance variation may be written as
L(x)=Lmin+(Lmax−Lmin)xxdwell; 0≤x≤xdwell(11.49)
So,
kb=∂L∂xI0=(Lmax−Lmin)xdwell⋅I0=(10−2)×10−310×10−3×42=33.6 W b/m(11.50)
Re=RS+∂L∂x⋅U0=0.2+(10−2)×10−310×10−3×1=0.2+0.8=1 Ω(11.51)
The mover mass MG = τm · B = 3 × 5.6 = 16.8 kg, and the equivalent electrical time constant
τe=LavRe=6×10−31=6×10−3 S(11.52)
The two small signal equations (11.43) write
(s+16×10−3)Δi+33.66×10−3ΔU=ΔV6×10−3−33.616.8Δi+(s+13)ΔU=−ΔFL16.8(11.53)
Now solving the characteristic equation (11.53) for ∆V = 0.1V0=4.2 V and ∆FL = 0, the two eigen values s12 are obtained. Once the eigen values are calculated (most probably in our case both are real and negative, say, −τ1, −τ2), the speed U is
U(t)=U0+ΔU(t)=U0+A1e−tτ1+A2e−tτ2+(Ufinal−U0)(11.54)
The new conducting time ton′ (at the new steady-state speed) is
(V0+ΔV)ton′=RSl0ton′+(Lmax−Lmin)/0(11.55)
Ufinal=U0⋅tonton′(11.56)
Now also at t = 0, U = U0 = 1 m/s, and (dU/dt)t=0 = 0 and thus from (11.54), both A1 and A2 constants are obtained. The current variation Ai may be obtained from (11.42)
Δi=(ΔU(t)τm+d(ΔU(t))dt)Gmkb(11.57)
As expected, the final speed increase is +10% as is voltage increase from constant load; and the current increases and then decreases to its initial value l0, because the load is unchanged. The structural diagram with its reduced form may be used directly in the design of control system (Figure 11.14).
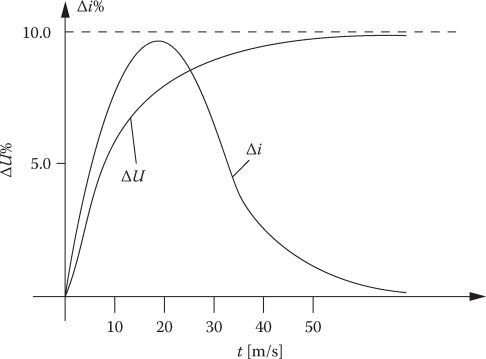
FIGURE 11.14 + 10% voltage step response at constant load (qualitative response). (After Krishnan, R., Switched Reluctance Motor Drives, CRC Press, Boca Raton, FL, 2001.)
11.8 Pwm Converters for L-SRMs
Typically, L-SRMs are supplied by unipolar currents per phase, and thus a two-switch per phase multiphase dc-dc converter with a front-end diode rectifier and capacitor filter constitutes the first option (Figure 11.15).
For typical hysteresis hard (fast) current control ± Vdc (with both switches on and off) is performed (Figure 11.4b); for soft (slower) current control +Vdc and zero voltage control is applied (Figure 11.14c). The minimum voltage rating of power devices is the dc link voltage. To provide equal RMS current in the power devices and the same average current in the freewheeling diodes, a distinct PWM strategy (different from those in Figure 11.14) is needed.
In essence, only one power switch is turned off to reduce the phase current, but the two power switches play this role one after the other. In an effort to reduce the number of power switches, quite a few alternative converter topologies have been proposed [3]. Among them, the C-dump converter stands out in terms of performance/cost Figure 11.15.
The total number of power switches is m + 1, and energy recovery when one (two) phase(s) is (are) active is secured from C-dump through Tr and Lr. There are five operation modes visible in Figure 11.16. The C-dump capacitor is calculated from its voltage variation ∆V0 during T1 turn off (from switch current ripple):
Cd=(1−d1)IfcΔV0(11.58)
Where
d1 is the minimum value T1 of PWM index
I is average phase current
fc is the switching frequency of current
The current ripple ∆i, for the interval, which corresponds to phase inductance variation ∆L (rotor position changes), is
Δi=Vdc⋅d1fc⋅Lav−I⋅ΔLLav(11.59)
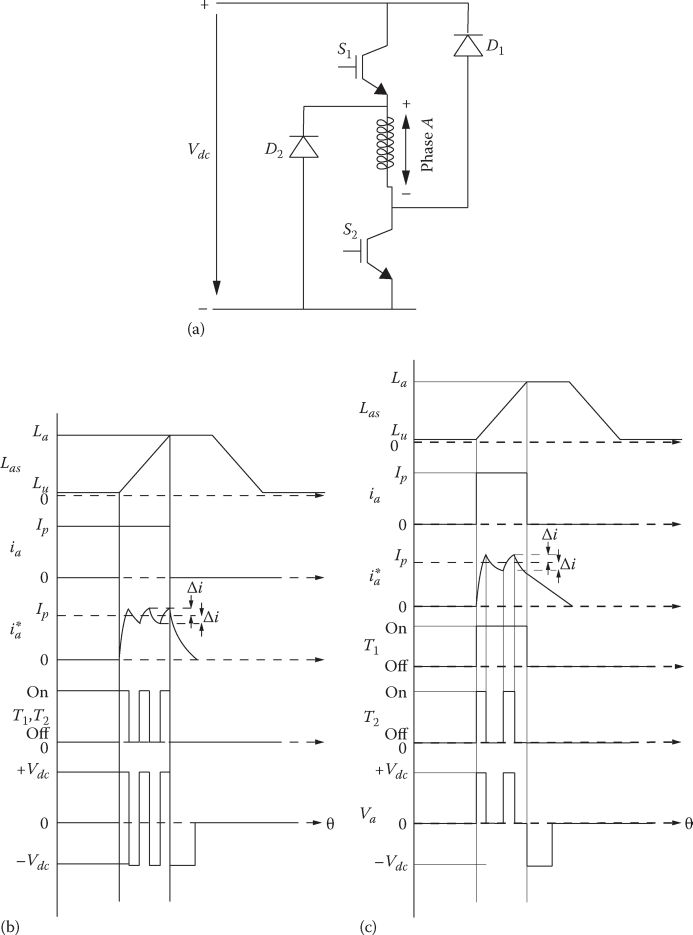
FIGURE 11.15 Two switches/phase dc–dc converter (a), hysteresis “hard” current control (b), and hysteresis “soft” current control (c). (After Krishnan, R., Switched Reluctance Motor Drives, CRC Press, Boca Raton, FL, 2001.)

FIGURE 11.16 C-dump converter with energy recovery (a) and its main variable waveforms, (b). (After Krishnan, R., Switched Reluctance Motor Drives, CRC Press, Boca Raton, FL, 2001.)
Current ripple leads to torque pulsations and additional copper and iron losses. The minimum switching frequency is calculated by equating the duty cycle d1 in (11.58) and in (11.59):
fc=VdcI⋅ΔL+L⋅Δi+Vdc⋅Cd⋅S⋅ΔV0(11.60)
∆i and ∆V0 are imposed in relative values for minimum I and L. We may continue with the design of the recovery inductance Lr (Figure 11.17), based on imposed ripple on the recovery current ∆ir:
LrΔir=d2fc(V0−Vdc)V0Ep; Ep=U⋅I∂L∂x; U−speed(11.61)
where
I is the average phase current
Ep is the average pseudo emf per phase

FIGURE 11.17 Variable dc link voltage buck-boost three-phase converter for L-SRM. (After Krishnan, R., Switched Reluctance Motor Drives, CRC Press, Boca Raton, FL, 2001.)
The phase voltage equation is such that
i(t)=Vdc−EpRs(1−e−tτe)+i0e−tτe; τe=L(x)RS(11.62)
during ton, when T1 is on and Tr is off.
If RS=0, the maximum and the minimum phase currents i(t) and i0(t) are obtained from linear variations (hard commutation):
i(t)=i0(t)(Vdc−EpL)ton; i(t)=i1(t)−V0−Vdc+EpLtoff(11.63)
ton=d11fc; toff=(1−d1)fc(11.64)
So the average PWM index d1 is
d1=V0−VdcV0+EpV0(11.65)
Usually, the pseudo emf Ep is defined as equal to base voltage Vb. So at base speed Ub:
V0=Vb=∂L∂x⋅Ub⋅Ib(11.66)
Substituting in (11.63) yields
d1=1−VdcVb+UUb⋅IIb; VdcVb=0.7−0.8(11.67)
As evident from (11.67), if Vdc/Vb = const., d1 has to increase with speed U/Ub. Increasing V0(Vb) for limited current limits the machine maximum speed. Adequate current (ir) and voltage (V0) control in the secondary circuit (Lr, Cd) leads to reasonable recovery current ripple ∆ir [3]. Yet another variable dc link voltage buck-boost converter with m + 1 power switches is shown in Figure 11.17.
The switch Tc, diode Dc, inductor L, and capacitor C form the buck-boost part of the converter.
The machine phase voltage Vi may reach up to 2 Vdc (say, for wider constant power-speed range), but then the power switches have to be designed to three times Vdc for the scope. In the buck mode Vi < Vdc, and thus better low-speed performance may be obtained.
11.9 Design Methodology by Example
Let us develop an electromagnetic design methodology for an L-SRM with specifications as given in the following:
Rated thrust to base speed: Fxn=400 N
Base speed Ub=2.4 m/s
DC link voltage Vdc = V0 = 300 Vdc
Number of phases m=3 (6 coils in all)
Topology: tubular
Travel length: 1 m
Free acceleration to Ub length ≤0.2 m
Flux/current/position curves: piece-wise linear
First, a thrust density by fxn = 1.6 N/cm2 for the stroke length lstroke = τp/2 = 15 mm and the airgap g = 0.3 mm is adopted. To retain enough time to turn off the active phase before producing drag force, we choose
x0−xulstroke=0.8(11.68)
From (11.23), we my calculate (with RS = 0) the maximum flux linkage in the phase ψb:
ψb=VdcU⋅0.8⋅lstroke=3002.4×0.8×15×10−3=1.5 Wb(11.69)
With equal primary slot and pole span, the primary (pole) length is bp = lstroke = 15 mm. The secondary slot pitch τs is thus
τS=3lstroke=45 mm(11.70)
The maximum thrust (current) is produced when (Figure 11.18) LS=Lu (unaligned).
Wmecksafe≈ψ′0(x0−xulstroke)Ib−ψ′202Lau; ksafe<1; ψ′0=ψb−LS⋅Ib(11.71)
ksafe is a safety factor.
Equation 11.71 may be used as verification after the design is done. At this stage, we can calculate the L-SRM diameter at airgap Dpi, as there are only two coils/phase and only one active phase at a time:
Fxn=π⋅Dpi⋅2(2lstroke)⋅fxnDpi=400π×4×2×15×10−3×1.6×104=0.0664 m(11.72)
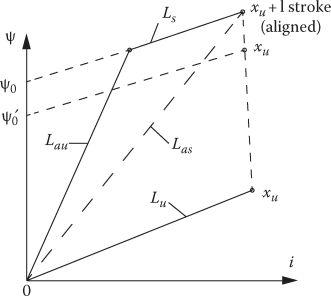
FIGURE 11.18 Simplified ψ(i)x curves.
Let us allow for maximum of airgap flux density in the aligned position of a phase to be Bb = 1.4 T.
The maximum flux linkage in the two coils per phase in series ψb is
ψb=2⋅Bb⋅bb⋅π⋅Dpi⋅WC; kd=x0−xulstroke=0.8(11.73)
WC is the turn/coil
Bb⋅WC=1.52×0.015×π×0.0664=239 T⋅turns(11.74)
The unaligned Lu and aligned Lau inductances per phase are
Lu=2Pmu⋅W2C; Lau=2Pma⋅W2C(11.75)
Pmu, Pma magnetic permeances per coil in unaligned and aligned position (see Figure 11.19 per phase A)—unsaturated:
Pma≈μ0⋅π⋅DSi⋅bp2g(11.76)
For saturated conditions in aligned position,
LaS=2⋅Pmas⋅W2C; Pmas=Pma(1+kS); kS—saturation factor.(11.77)

FIGURE 11.19 Tubular three-phase L-SRM.
Now with Bb = 1.4 T from (11.74), the number of turns per coil WC is
WC=WCBbBb=2391.4≈170 turns/coil(11.78)
So the unsaturated aligned position inductance yields
Lau=2μ0πDpibpW2C2g=2×1.1256×10−6×π×0.0664×0.015×17022×0.3×10−3=0.37884 H(11.79)
From field calculations (analytical [3] or 2D-FEM), the unaligned inductance Lu is Lu=Lau/10 = 0.03784 H. With ksafe = 0.75, kd=0.8, from (11.71) we may directly calculate the base (flat-top) phase current Ib as
Wmec=Fxav⋅lstroke=400×15×10−3=6 J(11.80)
60.75≈(1.5−0.03784⋅Ib)0.8⋅Ib−(1.5−0.03784⋅Ib)20.822×0.03784Ib≈8.35 A(11.81)
The saturated inductance Las (Figure 11.18) is thus obtained from
ψb=Las⋅Ib⋅kd; Las=1.58.25×0.8=0.22 H(11.82)
The RMS current/phase (Ib)RMS is approximately
(Ib)RMS=Ib√3=8.25√3=4.768 A(11.83)
With JCo RMS = 3 A/mm2 and slot filling factor ksfill = 0.5, the slot area of primary Aslotp is
Aslotp=Ib RMS⋅WCJCo RMS⋅ksfill=4.768×1703×0.5=540 mm2(11.84)
But the slot bsp = bp = 15 mm and thus the slot height is
hsp=Aslotpbsp=54015=36 mm(11.85)
The secondary tooth height (to reduce flux fringing) hss = 20 g = 20 × 0.3 = 6 mm.
The saturation factor kS is
kS=LauLas−1=0.37840.22−1=0.72(11.86)
There is enough space for reducing the primary and secondary back iron to reach this value of kS. A routine utilization of Ampere’s law along the field line as in Figure 11.19 will yield kS for Bb = 1.4 T. It is imperative to get Bb = 1.4 T for aligned position for WC · Ib = 170 × 8.4768 = 1441.056; otherwise, the rated thrust will not be obtained. The copper losses are
PCon=3I2b RMS⋅RS(11.87)
with
RS=2ρCoπ(DPi+hsp)WCIbRMSJCORMS =2.21×10−8×π×(0.064)×1704.788×3×10−6=0.8866 Ω(11.88)
So,
PCon≈3×0.8866×4.7682=60.46 W(11.89)
The frequency fn is
fn=Ubτs=2.445×10−3=53.33 Hz(11.90)
The approximate weight of primary is
Gp≈π((Dpi+2hsy+2hcp)2−D2Pi)4⋅13⋅bp⋅γi+c=π((66.4+2×36+2×10)2−66.42)4×10−6×13×15×10−3×8200=25.96 kg(11.91)
With a thrust of 400 N, the ideal acceleration of primary aimax is
aimax=FxaGp=40025.96=15.408 m/s2(11.92)
The ideal acceleration travel ltravel to Ub=2.4 m/s from standstill is
ltravel=U2b2a=2.422×15.408=0.187 m<0.2 m(11.93)
So the ideal acceleration to full speed may be accomplished under 0.2 m of travel out of the total travel of 1 m.
The efficiency may be calculated as
ηn=PmecPmec+PCom+Piron+Pmec(11.94)
With about 60% iron in the primary (15 kg) and 5 kg in the secondary and 2.5 W/kg iron losses and 10 W mechanical losses, the total efficiency is
ηn=400×2.4960+60.46+20×2.5+10=0.888(11.95)
Note: At this speed (2.4 m/s), the designed L-SRM is better than the LIM for same size and output in terms of efficiency; in terms of converter kVA, it is about the same (cos φ of an LIM is about 0.4 ÷ 0.5). A distinct design for a ship elevator of 55,000 N with multimodular, flat, double-sided, four-phase L-SRMs with active movers is described in Ref. [10] and could be a valuable guide of L-SRM potential.
Efforts to reduce undesired high normal force in single-sided flat L-SRM by pole shaping design are presented in Ref. [11], while separated-phase tubular topologies of L-SRM are designed in Ref. [12].
11.9.1 L-SRM CONTROL
By L-SRM control, we mean position or speed or thrust close-loop regulation.
Instantaneous current close-loop control is, in general, implicit. In L-SRM control, we may suppose that
Position sensing (by linear encoders or resolvers) is available
Motion-sensorless control is performed (in general) for speed and (or) thrust control
In view of the complexity of the flux/current/position and thrust/current/position curve families, the position, speed, or thrust control is rather nonlinear.
The linearized second-order structural diagram (11.13b) may be used for a preliminary design of, first, the current regulator and then the speed regulator (Figure 11.20; this design may be considered as preliminary. Thorough verifications of stability and performance of current and speed control in extreme conditions of thrust perturbations and machine parameter detuning are then required.
The generic control system in Figure 11.20 includes the following:
A fast phase current regulator with limiter (to avoid trespassing of maximum voltage available in the converter and for current fast protection).
1–2 kHz critical frequency with a damping factor ξ = 0.6–0.7.
A mildly fast speed regulator with a critical frequency around 100 Hz or more and, again, a damping factor ξ = 0.6–0.75.
A proportional (if any) position controller for a positioning application.
Other more robust controllers may be applied.
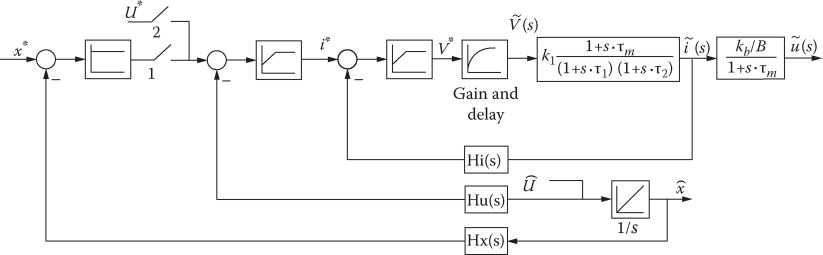
FIGURE 11.20 Generic cascaded position, speed, and current control; one phase in terms of current control is shown. (After Lim, H.S. et al., IEEE Trans,, IE-55(2), 534, 2008.)
For details of current and speed regulator design, see Ref. [3]. Once the preliminary design of current speed and position regulators is done, a more complete view of the current control may be obtained, by establishing the waveforms of phase reference currents for each phase so as to produce the required dynamic response and to exhibit low thrust pulsations and thus avoid noise and vibrations. Reference current waveforms for a given average torque and speed (to fulfill, in the presence of magnetic saturation) are not easy to find.
However, if magnetic saturation is not considered, the situation simplifies to some extent as the thrust of phase k is
Fxk=12gk(x)⋅i2k; gk(x)=∂Lk∂x(11.96)
For a four-phase L-SRM, the phase inductances La,b,c,d vary with position (magnetic saturation is absent or constant) as in Figure 11.21 [4].
As seen in Figure 11.20, the waveforms of the current should be obtained by reversing (11.96):
i*k(x)=√2F*xkgk(x)(11.97)

FIGURE 11.21 Inductances (a, b, c, d) (a), thurst (Fx) (b), and dL/dx (c) versus position for a four-phase L-SRM. (After Lim, H.S. et al., IEEE Trans., IE-55(2), 534, 2008.)
But, more than that, the reference thrust F*xk
F*x=∑F*x⋅fx(k); ∑k=a,b,c,dfk=1(11.98)
fx is called force distribution factor (FDF) [4], and its function choice is a matter of experience or trial and error, to minimize, again, the thrust pulsations with mover position in a feed forward manner.
A typical result with such an FDF system is shown in Figure 11.21 [4].
The control system in such a case may be defined as in Figure 11.22.
Though fk(x) and g(k) are a priori functions of mover position, the design of position, speed, and current regulator for a single phase with constant equivalent current could be a good start for more involved investigations. Digital simulations and experiments for critical dynamic operation modes will then validate the simplified regulator designs. Such dynamic simulation results [4] show good performance (Figures 11.23 and 11.24).
Controlled power-speed region extension control may be obtained by just changing FDF, that is, fk(x) functions with speed (and, evenly, with reference total thrust F*x
ddtΨk=Vk−RSIk; k=a,b,c,d…(11.99)
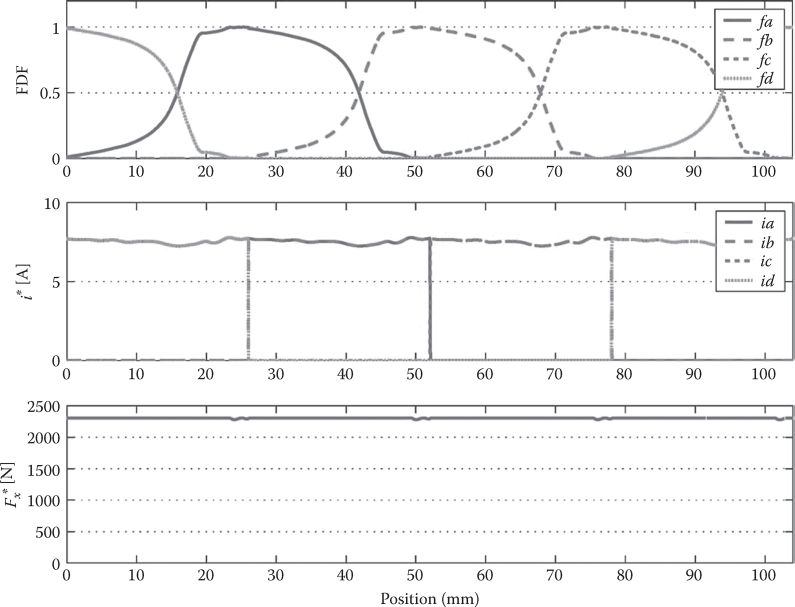
FIGURE 11.22 Thrust control with FDF thrust reference at U=−0.5 m/s and advance phase excitation by 2 mm. (After Lim, H.S. et al., IEEE Trans., IE-55(2), 534, 2008.)

FIGURE 11.23 Four-phase L-SRM control: (a) structural diagram, (b) thrust division between phases and current control. (After Lim, H.S. et al., IEEE Trans., IE-55(2), 534, 2008.)

FIGURE 11.24 Position and speed repetitive response (flat-top speed is + 0.33 m/s). (After Lim, H.S. et al., IEEE Trans., IE-55(2), 534, 2008.)
The mechanical energy Wmec per cycle (from zero to zero current per phase) is
Wmec=∫dψdti⋅dt=x off∫x on∂W′m∂x⋅dx=x off∫x oni∫0∂ψk(x,i)∂x⋅di⋅dx(11.100)
This integral should be reset to zero after the current reaches zero and thus the magnetization—demagnetization energy portions per phase cancel each other, and the average thrust of the machine per stroke is
Fxav=mWmeclstroke(11.101)
m is the number of phases
The average torque estimator is illustrated in Figure 11.25a.
The generic direct average thrust control in Figure 11.25 may be characterized as follows:
It uses an average thrust/phase estimator based on a flux calculator from the voltage model: integral offset, converter nonlinearities, and phase resistance correction are all needed for good operation down to low speed.
The average thrust may be estimated for each phase and added for faster average thrust control, as anyway current regulators are in general needed for all phases.
The off-line computation effort is concentrated (Figure 11.25) to calculate, for given average thrust Fx, dc voltage Vdc, mover position x and speed U, the flat average top current level I0, the turn on position xon (advanced at higher speeds), and the commutation (turn off) position xco.
Also, if the thrust has to be negative (regenerative braking) the off-line calibrator sets xon and xco at their proper values (into the negative inductance slope region).
It has to be conceded that for an acceptable control of L-SRM, even with a position feedback sensor, both the off-line and the on-line computer effort is more demanding than for LIMs or LSMs as will be seen in further chapters on L-PMSMs; however, the absence of PMs and the motor ruggedness and lower initial costs make L-SRM a strong candidate in cost- and temperature-sensitive applications.

FIGURE 11.25 Direct average torque control of L-SRM: (a) average torque estimation and (b) generic control (c) typical waveforms of current, voltage, flux linkage and energy.

11.9.2 Note on Motion-Sensorless Control
Motion-sensorless control of L-SRMs is very similar to that of their rotary counterparts [3]. However, the absolute position estimation needs at least one marked position in the secondary (fixed part, in general) to detect a reference signal. For speed control, however, only relative position is required.
Other than these remarks, the rich body of knowledge of sensorless control of rotary SRM may be adapted for linear motion control by L-SRM. An exemplary investigation, to follow, is given in Ref. [13].
11.10 Summary
L-SRMs are counterparts of rotary SRMs.
The combinations of stator NS and rotor NR poles typical to rotary SRMs have to translate into ratios of active primary to passive secondary saliency period (τp/τs).
L-SRMs may be flat, single sided, double sided, and tubular.
As the normal force Fn to thrust Fx ratio in flat single-sided L-SRMs tends to be larger than 10/1, either the normal force is controlled for magnetic levitation or double-sided flat or tubular topologies are to be used. Recent new dual primary topologies reduce the Fn/Fx ratio considerably [18].
As for rotary machines, longitudinal and transverse flux topologies are feasible; transverse topologies are in general free of longitudinal end static effects, and thus with 3(6) or 4(8) primary pole small L-SRMs such configurations for 3(4) phase operation are recommended.
A typical, single (secondary) saliency topology with 5, 6, 7 phases and two-level bipolar current control, where mF phases produce the “excitation” and the other m − mF phases are thrust phases, is also introduced as potentially it may yield good thrust and normal force density for good efficiency and reasonable peak kVA ratings in the multiphase inverter topology.
To illustrate the operation principle, a simple U core primary single coil with I-secondary is investigated for thrust, normal force, and losses/thrust performance. The attraction of the laminated secondary to the primary, when the latter is supplied, and the typical coenergy variation with position (x and g-airgap) are the basis for thrust and normal force production in L-SRM. In a numerical example, 2.6 N/cm2 of thrust, 87 N/cm2 of normal force, and 0.9 N/W of copper losses are typical performance indexes for L-SRM.
The instantaneous thrust calculation from the coenergy (Fx=−(∂W′m/∂x)i=const.)
(Fx=−(∂W′m/∂x)i=const.) requires the flux linkage/current/position family of curves, which may be calculated via complex magnetic circuit or FEM models or measured (from standstill current-decay tests).Due to magnetic saturation, the thrust/position curve for constant current is not a horizontal line and thus commutation phases are added—there may be notable thrust pulsations with flat-top current control in three- or even in four-phase L-SRMs.
But magnetic saturation reduces the transient (commutation) inductance (L′ = L + i∂L/∂i) and thus allows higher speeds.
From the flux/current/position, ψ/i/x, family of curves, the average mechanical energy per energy cycle/phase may be determined Wmec = Fxav · lstroke(lstroke ≈ τp/2). A part of energy Wmag is returned to the dc link through the PWM converter that supplies each phase.
The ratio ηec = Wmec/(Wmec + Wmag) is called the energy cycle conversion ratio and it is 0.5 for nonsaturated L-SRM and 0.6−0.67 for saturated conditions. A low ηec is an indication of high kVA rating requirements from the PWM converter supply. In general, the peak kVA of the converter is larger than for most ac linear motors.
As the thrust sign (for motoring or generating) does not depend on current polarity, homopolar current is in general supplied to L-SRM phases.
The phase magnetic coupling is rather small in L-SRMs, which is good for fault tolerance but not so good for thrust density.
The state space equations contain phase voltage equations and the equations of motions.
The phase voltage equations contain a pseudo-emf
<unnumbered_display_equation/>
(E=i∂L(x,i,g)∂xdxdt+i∂L(x,i,g)∂gdgdt),
(E=i∂L(x,i,g)∂xdxdt+i∂L(x,i,g)∂gdgdt), which is related to linear (along x) and vertical (along g) motions: however, the thrust may be calculated from Fx = (i2/2)(∂L/∂x) only in the absence of magnetic saturation (all ψ/i/x curves are linear); otherwise, the coenergy formula has to be used (Fx=−(∂W′m/∂x)i=const.)
(Fx=−(∂W′m/∂x)i=const.) .As the L-SRM is not a traveling field machine, there are core losses both in the primary and in the secondary; they have to be carefully assessed in any realistic efficiency calculation attempt.
For linear piece-wise ψ/i/x curves (Figure 11.12), with state space equations linearization, a second-order structural diagram for transients, typical to series dc excited brush motor, are obtained. This result helps notably in the design of the current and speed close-loop regulators for L-SRM.
From a myriad [3] of unipolar current multiphase dc–dc converters suitable for L-SRMs, only the one with two power switches per phase (2 m switches in general) and the C-dump converter with m + 1 power switches are introduced and characterized here as very practical for the scope. An analytical design methodology based on linear-wise ψ/i/x curve (magnetic saturation not considered) has been developed in this chapter via a numerical example: the design yields also all circuit parameters tuned for close-loop current and speed regulators. For a 400 N, 2.4 m/s, tubular L-SRM case study, a total efficiency of 0.888 is obtained for an active primary of 26 kg; an ideal acceleration of active primary mover of 15 m/s2 is obtained, which allows for acceleration to 2.4 m/s within 0.2 m, which may be enough for many short travel transportation jobs in industrial applications.
The control of L-SRM is approached first through the cascaded—current, speed, position—strategy that makes use of the linearized second-order model of L-SRM for control design.
The “force distribution factor” (FDF) fk dependent on ∂L/∂x, when supplied for a nonsaturated four-phase L-SRM to produce the required reference current waveforms that reduce the thrust pulsation to less than 10%, is good enough in many servo applications.
Positioning steady-state error of 3.5 µm has been claimed with a rather involved computer intensive control of three-phase L-SRM [14,15].
In an effort to reduce the off- and on-line computation effort, a direct average thrust control system is presented in some detail.
A note on motion-sensorless control sends to the sensorless control of rotary SRM [3] wherefrom a lot can be used for L-SRMs.
As the use of PMs in electromagnetic devices increases (especially in automotive and wind and small hydro sectors), the SRMs and especially L-SRMs may become more competitive due to their simplicity, ruggedness, and low enough initial system costs.
References
1. T.J.E. Miller, Switched Reluctance Motors and Their Control, Magna Physics Publishing, Oxford, U.K., 1993.
2. I. Boldea and S.A. Nasar, Linear Electric Actuators and Generators, Cambridge University Press, Cambridge, U.K., 1997.
3. R. Krishnan, Switched Reluctance Motor Drives, CRC Press, Boca Raton, FL, 2001.
4. H.S. Lim, R. Krishnan, and N.S. Lobo, Design and control of linear propulsion system for an elevator using linear switched reluctance motor drives, IEEE Trans., IE-55(2), 2008, 534–542.
5. K.B. Saad, M. Benrejeb, and P. Brochet, One two control methods for smoothing the linear tubular switched reluctance stepping motor position, Record of LDIA-2007.
6. I.D. Law, A. Chertok, and T.A. Lipo, Design and performance of the field regulated reluctance machine, Record of IEEE-IAS, 1992, vol. 1, Houston, TX, pp. 234–241.
7. I. Boldea, Reluctance Synchronous Machines and Drives, Chapter 2, Oxford University Press, U.K., 1996.
8. I. Boldea, Variable Speed Generators, Chapter 9, CRC Press, Taylor & Francis, Boca Raton, FL, 2006.
9. A. Radun, Design considerations on SRMs, Record of IEEE-IAS, 1994.
10. H.S. Lim, Design and control of a linear propulsion system for an elevator using L-SRM drives, IEEE Trans., IE-55(2), 2008, 534–542.
11. E. Santo, M.R. Calado, and C.M. Cabrita, Influence of pole shape in linear switched reluctance actuator performance, Record of LDIA, 2007.
12. W. Missaoui, L. El Ambraoni Ouni, F. Gillon, M. Benrejeb, and P. Brochet, Comparisons of magnetic behavior of SR and PM tubular linear three-phase synchronous linear motors, Record of LDIA, 2007.
13. G. Pasquesoone and I. Husain, Position estimation at starting and lower speed in 3 phase SRMs using pulse injection and two thresholds, Record of IEEE-ECCE, 2010, pp. 2660–2666.
14. W.-C. Gan, N.C. Cheung, and L. Qiu, Position control of linear SRMs for high precision applications, IEEE Trans., IA-39(5), 2003, 1350–1362.
15. S.H. Lee and Y.S. Baek, Contact free switched reluctance linear actuator for precision stage, IEEE Trans., Mag-40(4), 2004, 3075–3077.
16. G. Baoming, A.T. de Almeida, and F. Ferreira, Design of transverse flux linear switched reluctance motor, IEEE Trans., Mag-45(1), 2009, 113–119.
17. R.B. Inderka and R.W. de Doncker, Simple average torque estimation for control of SRMs, Record of EPE-PEMC, 2000, vol. 5, Kosice, Slovakia, pp. 176–181.
18. W. Wang, C.H. Lin, and B. Fahimi, Comparative analysis of double stator switched reluctance machine and PSMS, Record of IEEE-ISIE, 2012.